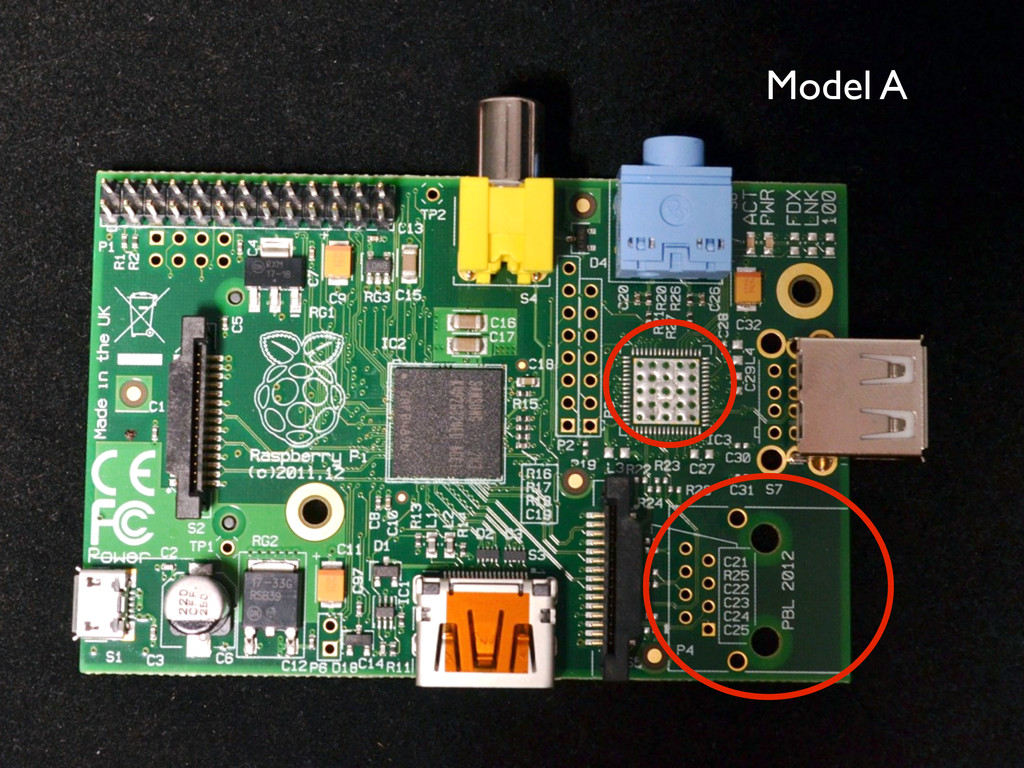
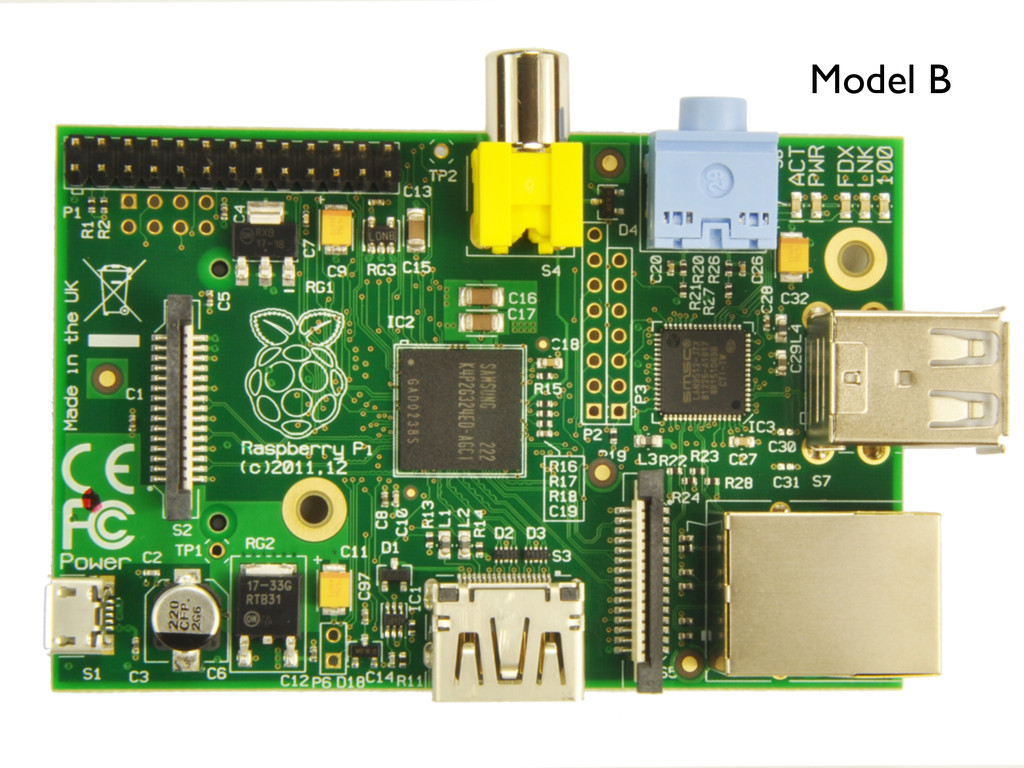
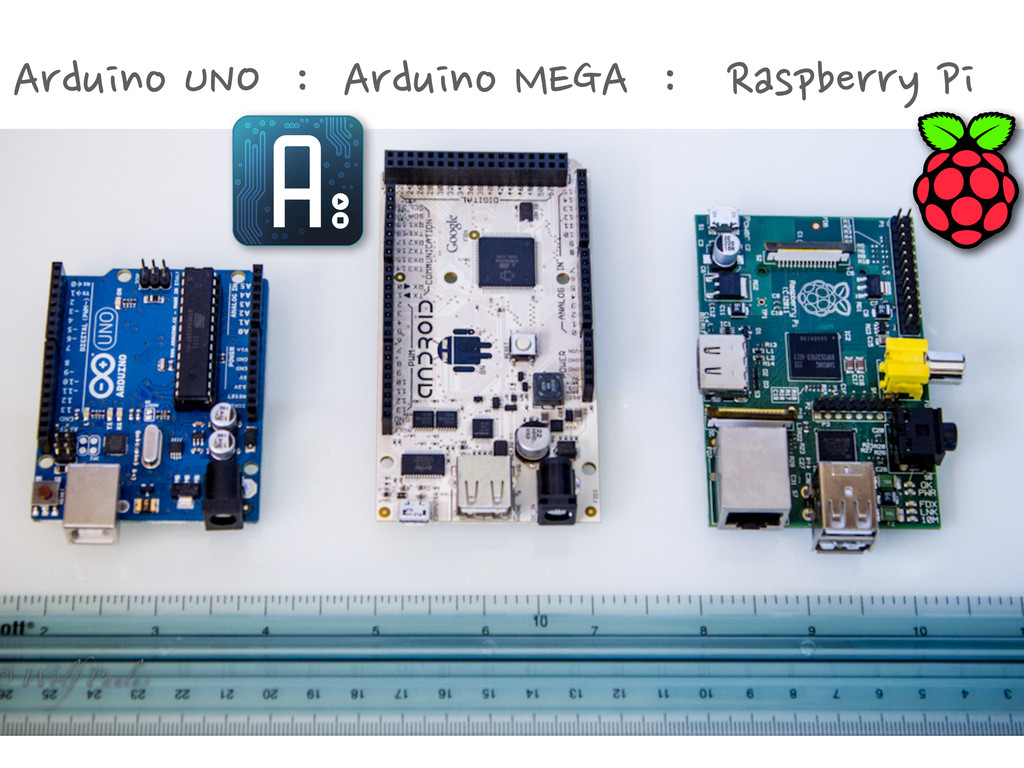
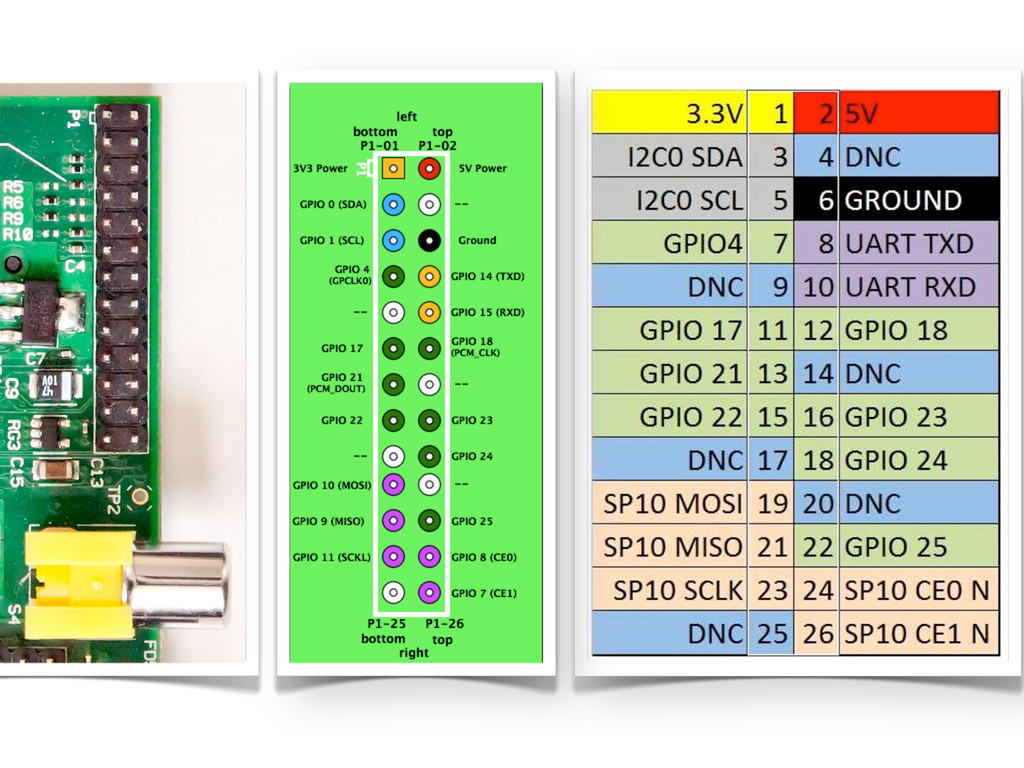
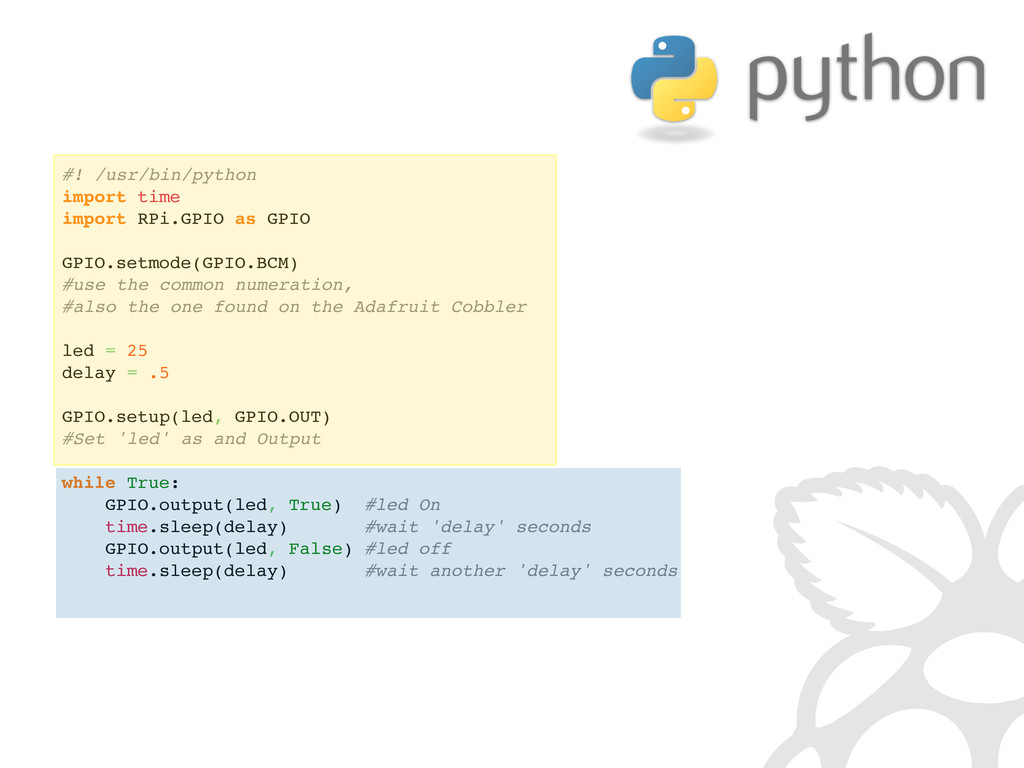
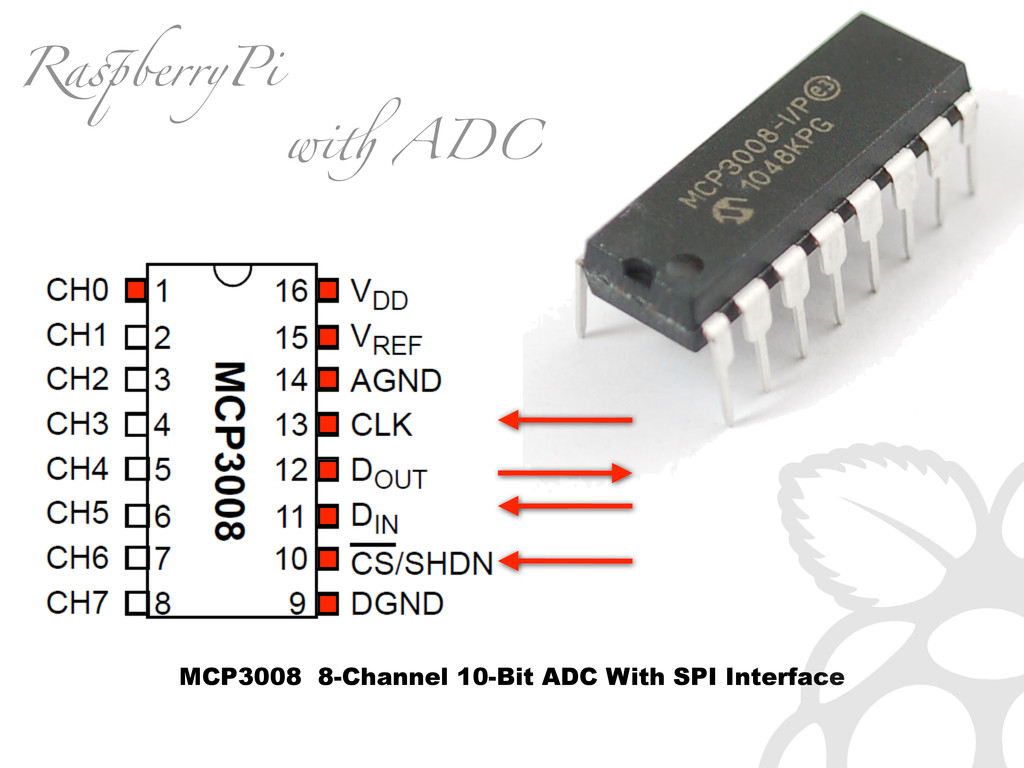
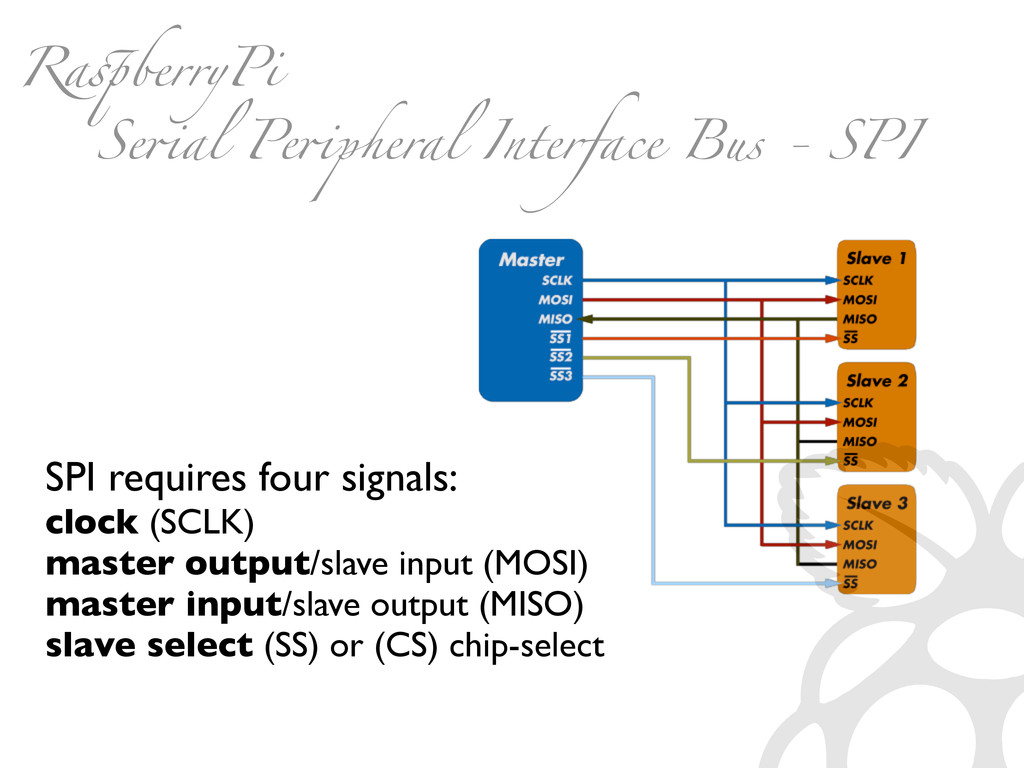
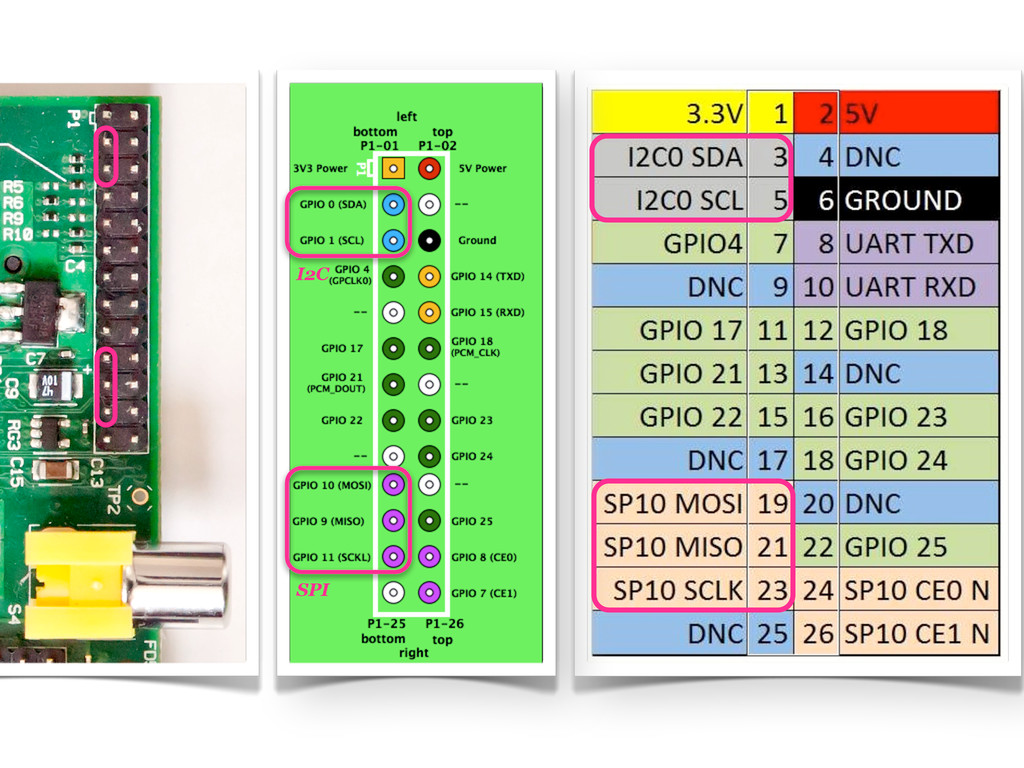
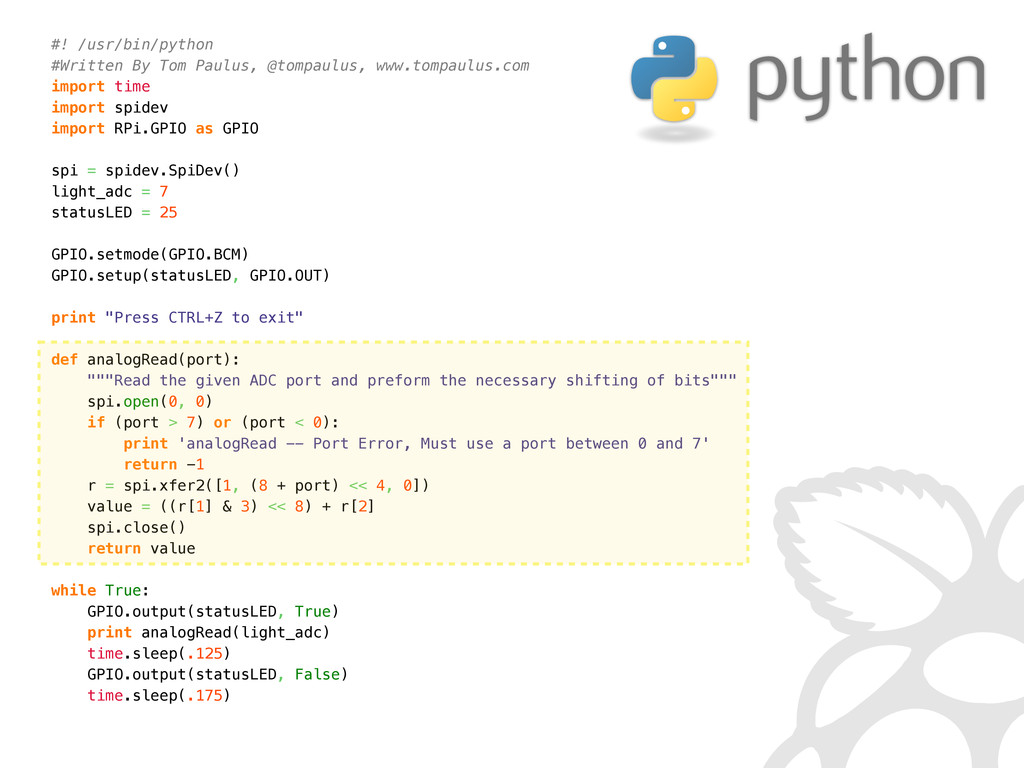
The Raspberry Pi is a small credit-card sized linux computer. Developers and hobbyists around the world are creating miraculous applications and projects, and now you can join them. Last year we presented Raspberry Pi, What We Have Learned So Far, This year's presentation covers the first steps to using your Pi. From the basics, like burning your SD Card to creating a News Reader, you will learn GPIO Basics and simple Python tools. Communication between other components using SPI or I2C will also be covered. It is recommended, but not required that you have a Raspberry Pi, some knowledge of Python and simple electronics.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![IN =[0000 0001][1CNL ----][---- ----] (8+channel) <<4 OUT=[---- ----][---- -XXX][XXXX](https://files.speakerdeck.com/presentations/e5d836d0d92e0130fd524aa4e1e38476/slide_28.jpg){kind=link}
![IN =[0000 0001][1CNL ----][---- ----] (8+channel) <<4 OUT=[---- ----][---- -XXX][XXXX](https://files.speakerdeck.com/presentations/e5d836d0d92e0130fd524aa4e1e38476/slide_29.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Slides: Code Used in this Talk: http://tompaulus.com/talks https://github.com/tpaulus/DCC-April13 Email: [email protected]](https://files.speakerdeck.com/presentations/e5d836d0d92e0130fd524aa4e1e38476/slide_62.jpg){kind=link}
{kind=link}