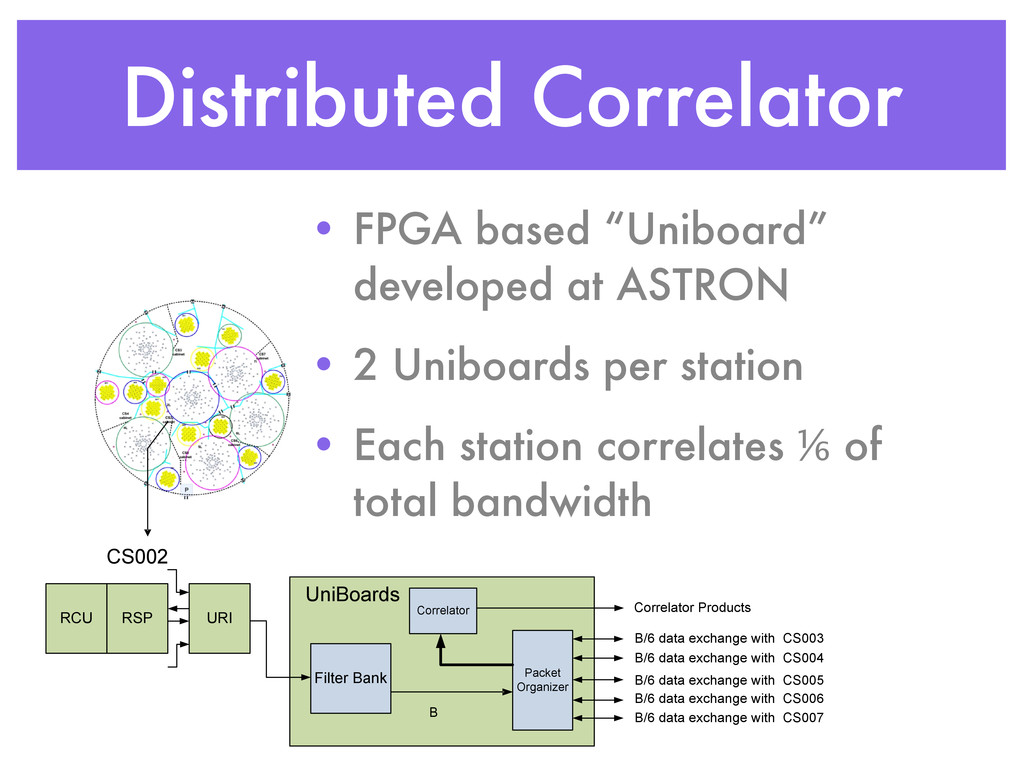
Correlator Products RCU RSP Filter Bank Correlator URI Packet Organizer B/6 data exchange with CS004 B/6 data exchange with CS005 B/6 data exchange with CS006 B/6 data exchange with CS007 • FPGA based “Uniboard” developed at ASTRON • 2 Uniboards per station • Each station correlates ⅙ of total bandwidth
for separate calibration observations • Accuracy adequate to generate consistent images for image plane transient detection • Latency low enough to enable quasi-real time operation • Amenable to a distributed approach • Ability to deal with problematic (RFI affected, inaccurate sky model etc.) timeslices
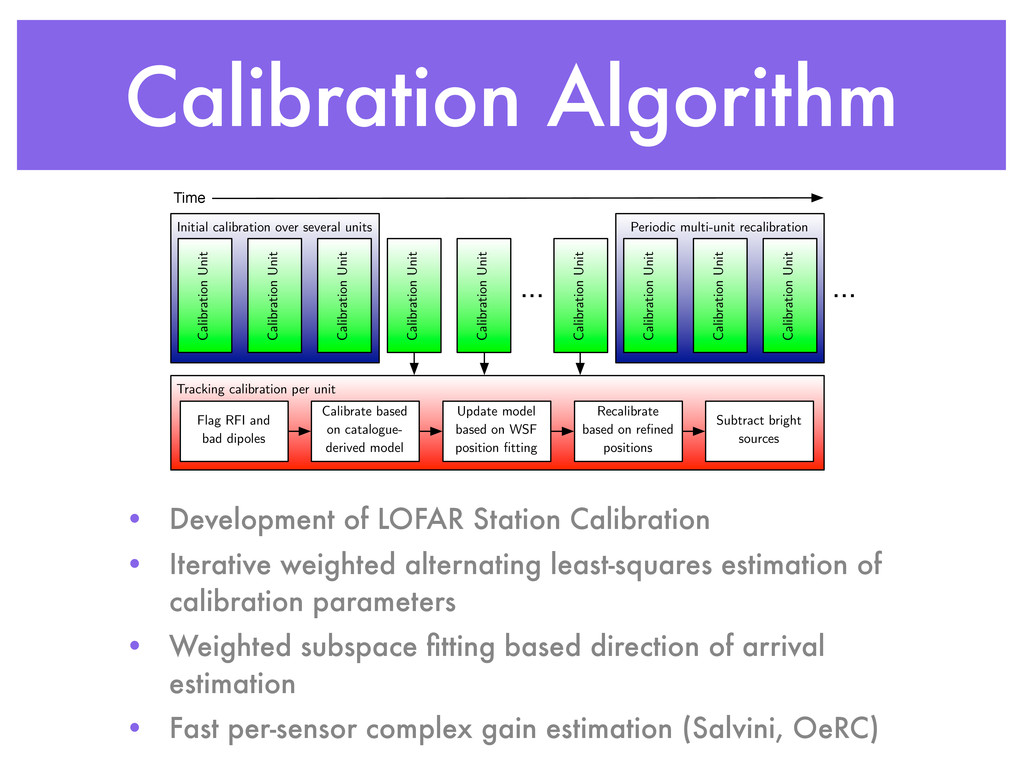
Calibration Unit Calibration Unit Calibration Unit Calibration Unit Calibration Unit Calibration Unit Calibration Unit Calibration Unit Calibration Unit Time ... Tracking calibration per unit Flag RFI and bad dipoles Calibrate based on catalogue- derived model Update model based on WSF position fitting Recalibrate based on refined positions Subtract bright sources ... • Development of LOFAR Station Calibration • Iterative weighted alternating least-squares estimation of calibration parameters • Weighted subspace fitting based direction of arrival estimation • Fast per-sensor complex gain estimation (Salvini, OeRC)
• Thanks, Adriaan, Anastasia, Ger, the LOFAR Data Formats WG, Antonia, ...! • I thought it would never happen, but... • Thanks, Adriaan, Anastasia, Ger, the LOFAR Data Formats WG, Antonia, ...!
• Simple bad data rejection • Simple imager • Matlab calibration code • Integration of Matlab code with C++ • MeasurementSet & image output • In progress: • Matlab prototype of advanced imager • Porting Matlab calibration code to C++ • To come: • Port imager to C++ • Command and control • Integration with LOFAR systems + further upgrades, refinements, etc to all the above!
may be considered for early deployment • Data-dumps & offline correlation enable rapid progress with the imaging system • Combination of Matlab for experimentation & C++/Pelican for deployment working well • Still a lot of work to make the Trap meet our performance requirements • Targeting regular operations during 2013
![AARTFAAC Project Update John Swinbank [email protected] LOFAR TKP Project Meeting](https://files.speakerdeck.com/presentations/1d2886601f72013073ba12313d1621a2/slide_0.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}