Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
コンピュータビジョン2.1節
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Takahiro Kawashima
May 14, 2018
Science
500
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
コンピュータビジョン2.1節
研究室のゼミで発表したRichard Szeliski 著,玉木徹ら訳の『コンピュータビジョン − アルゴリズムと応用』2.1節のスライド
Takahiro Kawashima
May 14, 2018
More Decks by Takahiro Kawashima
See All by Takahiro Kawashima
論文紹介:HalluCitation Matters
wasyro
0
98
引力・斥力を制御可能なランダム部分集合の確率分布
wasyro
0
400
集合間Bregmanダイバージェンスと置換不変NNによるその学習
wasyro
0
340
論文紹介:Precise Expressions for Random Projections
wasyro
1
620
ガウス過程入門
wasyro
0
1.1k
論文紹介:Inter-domain Gaussian Processes
wasyro
0
210
論文紹介:Proximity Variational Inference (近接性変分推論)
wasyro
0
400
機械学習のための行列式点過程:概説
wasyro
0
2.2k
SOLVE-GP: ガウス過程の新しいスパース変分推論法
wasyro
1
1.6k
Other Decks in Science
See All in Science
データベース02: データベースの概念
trycycle
PRO
2
1.2k
Amusing Abliteration
ianozsvald
1
210
データベース09: 実体関連モデル上の一貫性制約
trycycle
PRO
0
1.2k
生成AI・プレプリント時代における 研究成果公開の再設計 ― トップカンファレンス文化はどこへ向かうのか / Redesigning the Dissemination of Research Outputs in the Age of Generative AI and Preprints — Where Is the Top-Conference Culture Heading?
ykiyota
0
27k
Distributional Regression
tackyas
0
540
(メタ)科学コミュニケーターからみたAI for Scienceの同床異夢
rmaruy
0
250
Utiliser Bitcoin sans Internet
rlifchitz
0
180
Endel Tulvingとエピソード記憶
rmaruy
0
140
Testing the Longevity Bottleneck Hypothesis
chinson03
0
320
Tensor Factorization Meets Deformed Information Geometry: Convex Relaxation under Deformed Algebra
gkazunii
0
110
MATSUO Makiko
genomethica
0
150
機械学習 - K近傍法 & 機械学習のお作法
trycycle
PRO
1
1.5k
Featured
See All Featured
The untapped power of vector embeddings
frankvandijk
2
1.8k
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
230
23k
jQuery: Nuts, Bolts and Bling
dougneiner
66
8.5k
brightonSEO & MeasureFest 2025 - Christian Goodrich - Winning strategies for Black Friday CRO & PPC
cargoodrich
3
730
Money Talks: Using Revenue to Get Sh*t Done
nikkihalliwell
0
250
Principles of Awesome APIs and How to Build Them.
keavy
128
18k
Why Mistakes Are the Best Teachers: Turning Failure into a Pathway for Growth
auna
0
160
State of Search Keynote: SEO is Dead Long Live SEO
ryanjones
0
200
Stewardship and Sustainability of Urban and Community Forests
pwiseman
0
230
The AI Revolution Will Not Be Monopolized: How open-source beats economies of scale, even for LLMs
inesmontani
PRO
3
3.5k
Introduction to Domain-Driven Design and Collaborative software design
baasie
1
840
A Tale of Four Properties
chriscoyier
163
24k
Transcript
第1回 画像ゼミ 2018/05/09 庄野研B4 1510173 川島貴大
2 / 37 2.1.1 - 幾何プリミティブ 2.1.2 - 2次元変換 2.1.3
- 3次元変換 2.1.4 - 3次元回転 2.1.5 - 3次元から2次元への射影 2.1.6 - レンズ歪み もくじ
3 / 37 2.1.1 幾何プリミティブ • 2次元点 通常の座標表記: →無限遠点を表せない 同次座標系:
→ で無限遠点を表せる
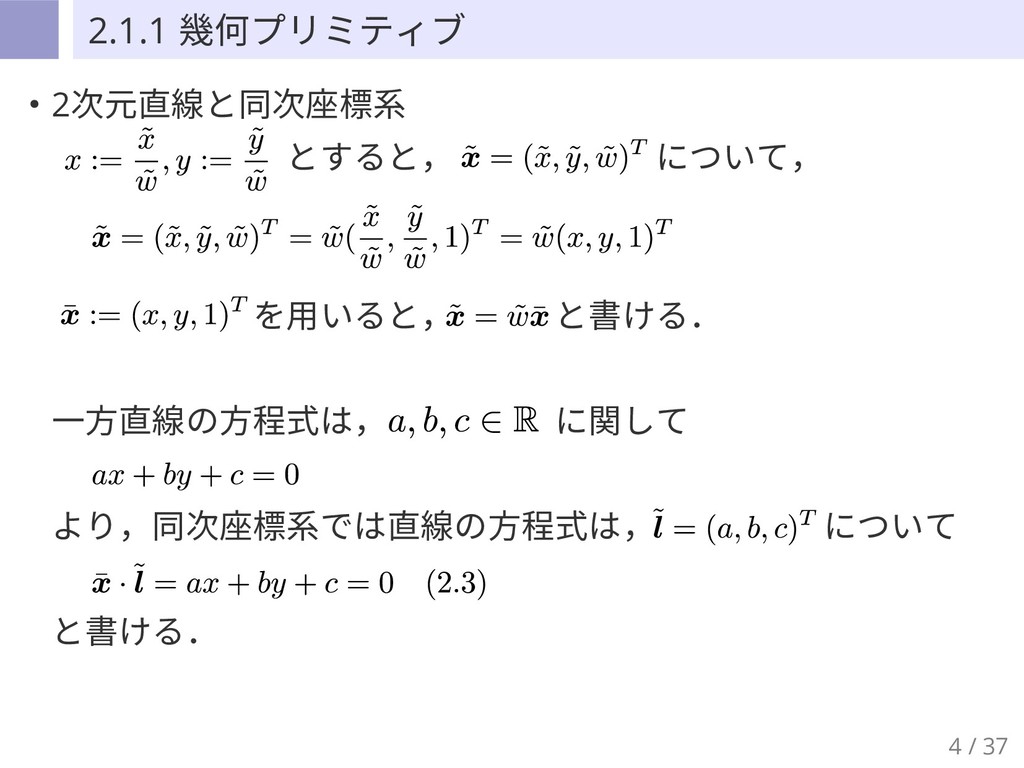
4 / 37 • 2次元直線と同次座標系 とすると, について, を用いると, と書ける. 一方直線の方程式は, に関して より,同次座標系では直線の方程式は, について
と書ける. 2.1.1 幾何プリミティブ
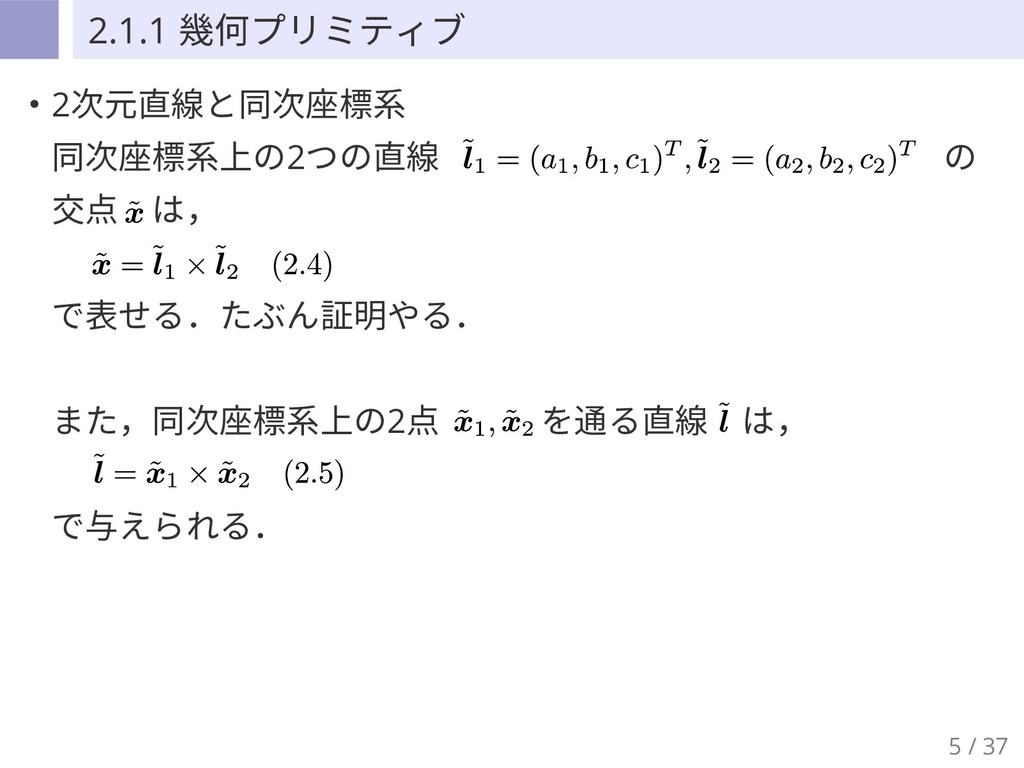
5 / 37 • 2次元直線と同次座標系 同次座標系上の2つの直線 の 交点 は, で表せる.たぶん証明やる. また,同次座標系上の2点 を通る直線 は, で与えられる.
2.1.1 幾何プリミティブ
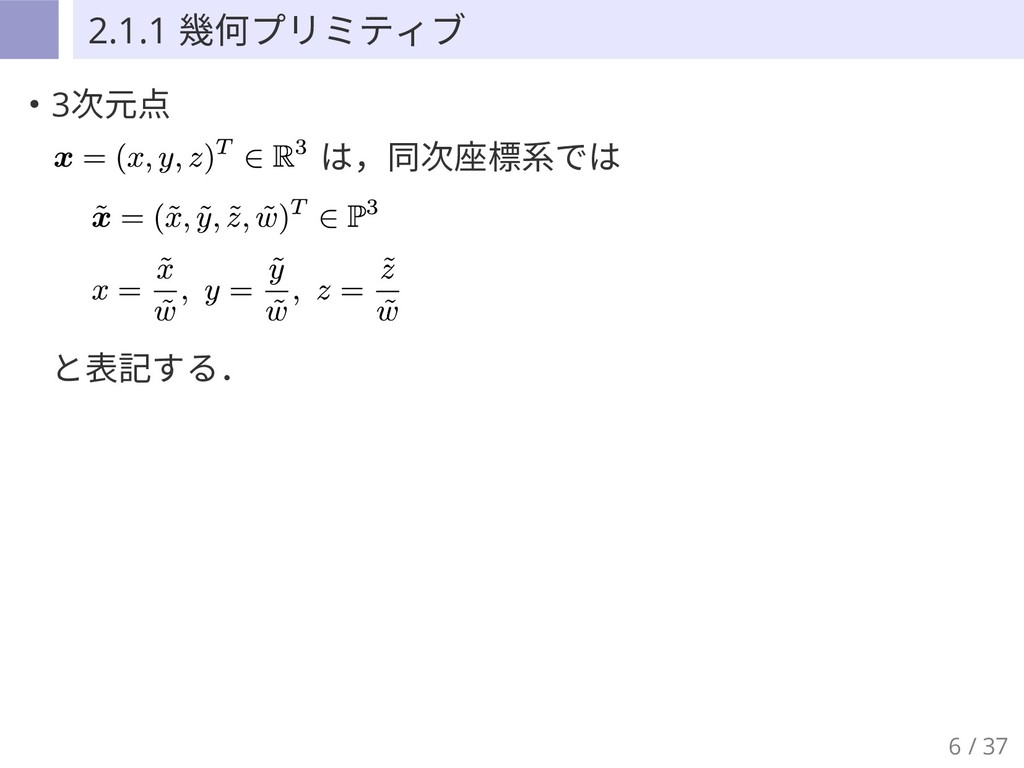
6 / 37 2.1.1 幾何プリミティブ • 3次元点 は,同次座標系では と表記する.
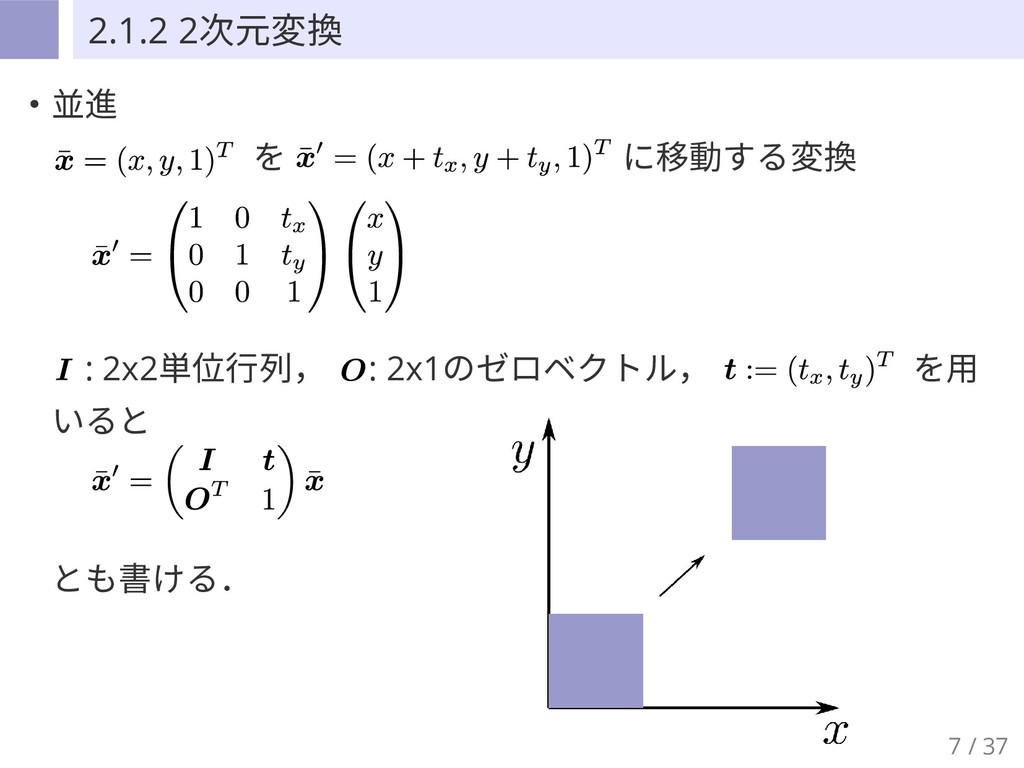
7 / 37 2.1.2 2次元変換 • 並進 を に移動する変換 : 2x2単位行列,
: 2x1のゼロベクトル, を用 いると とも書ける.
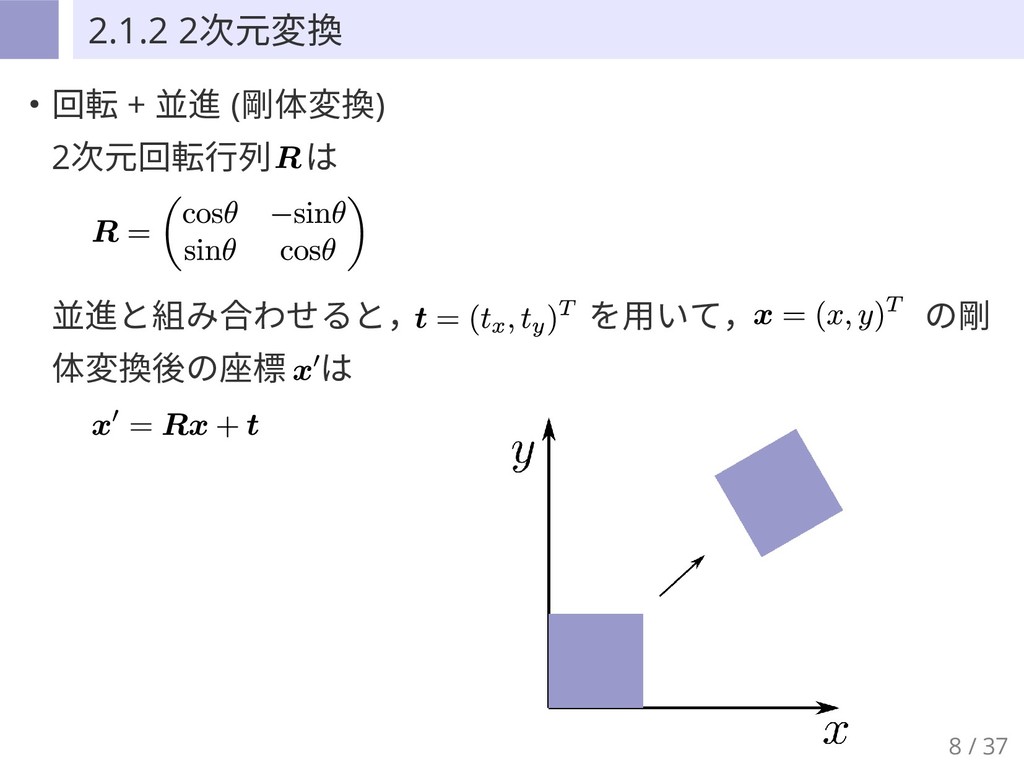
8 / 37 2.1.2 2次元変換 • 回転 + 並進 (剛体変換)
2次元回転行列 は 並進と組み合わせると, を用いて, の剛 体変換後の座標 は
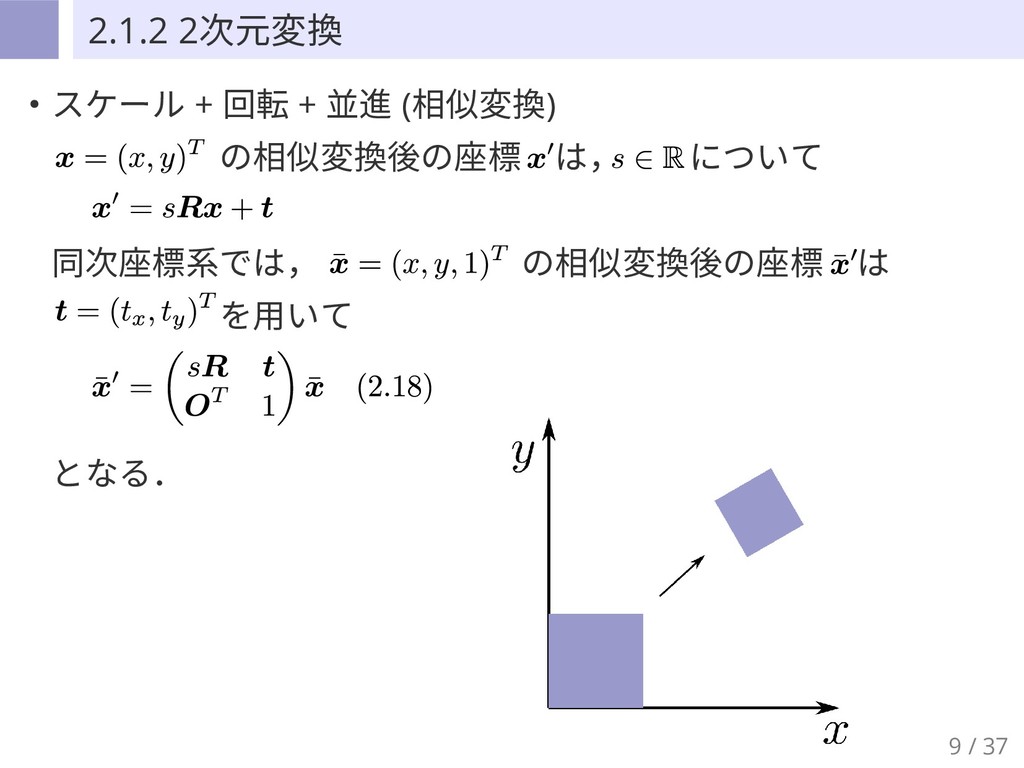
9 / 37 2.1.2 2次元変換 • スケール + 回転 +
並進 (相似変換) の相似変換後の座標 は, について 同次座標系では, の相似変換後の座標 は を用いて となる.
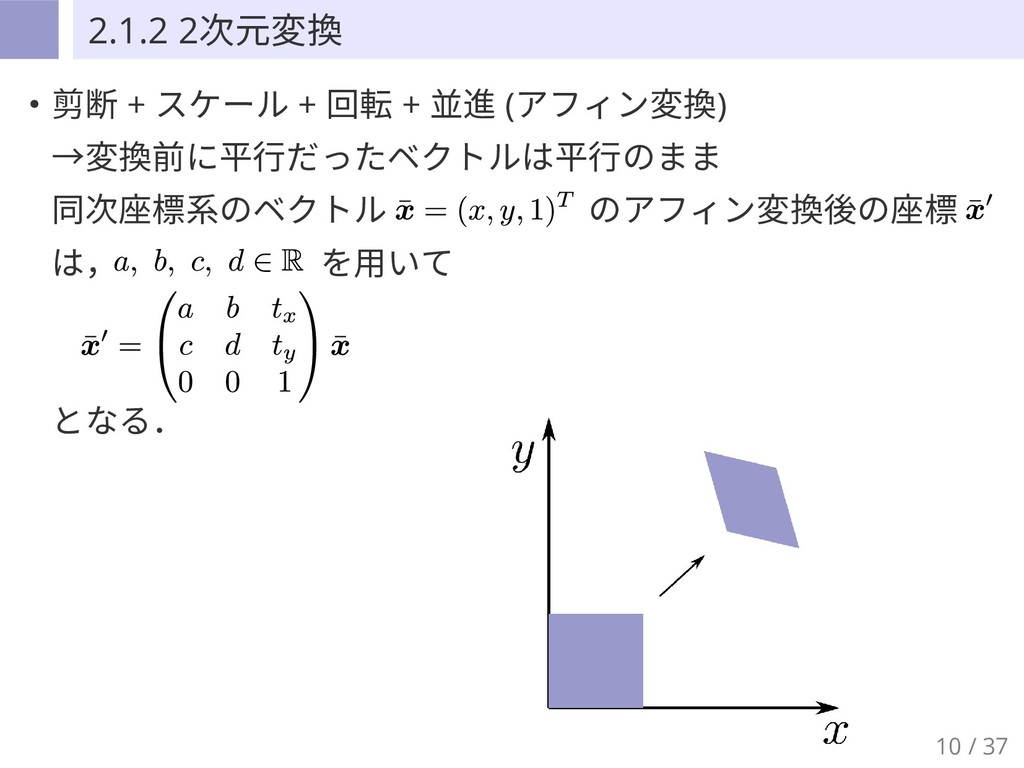
10 / 37 2.1.2 2次元変換 • 剪断 + スケール +
回転 + 並進 (アフィン変換) →変換前に平行だったベクトルは平行のまま 同次座標系のベクトル のアフィン変換後の座標 は, を用いて となる.
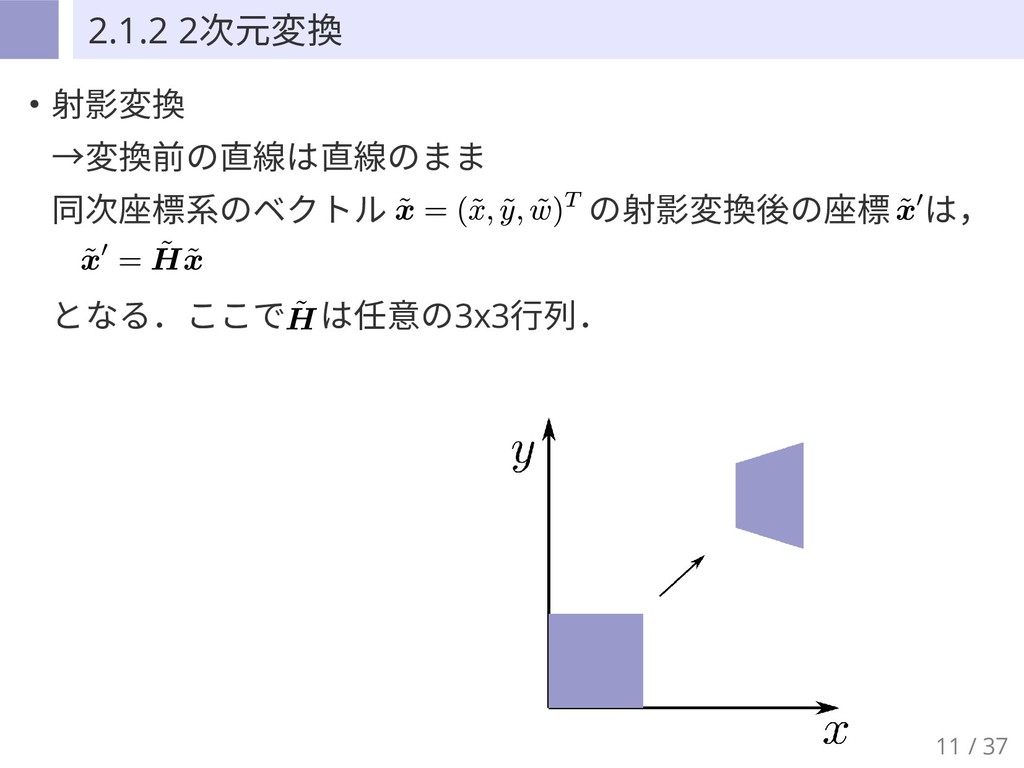
11 / 37 2.1.2 2次元変換 • 射影変換 →変換前の直線は直線のまま 同次座標系のベクトル の射影変換後の座標 は, となる.ここで は任意の3x3行列.
12 / 37 2.1.2 2次元変換 • 伸縮 →アスペクト比を変更 の伸縮後の座標 は, を用いて となる.
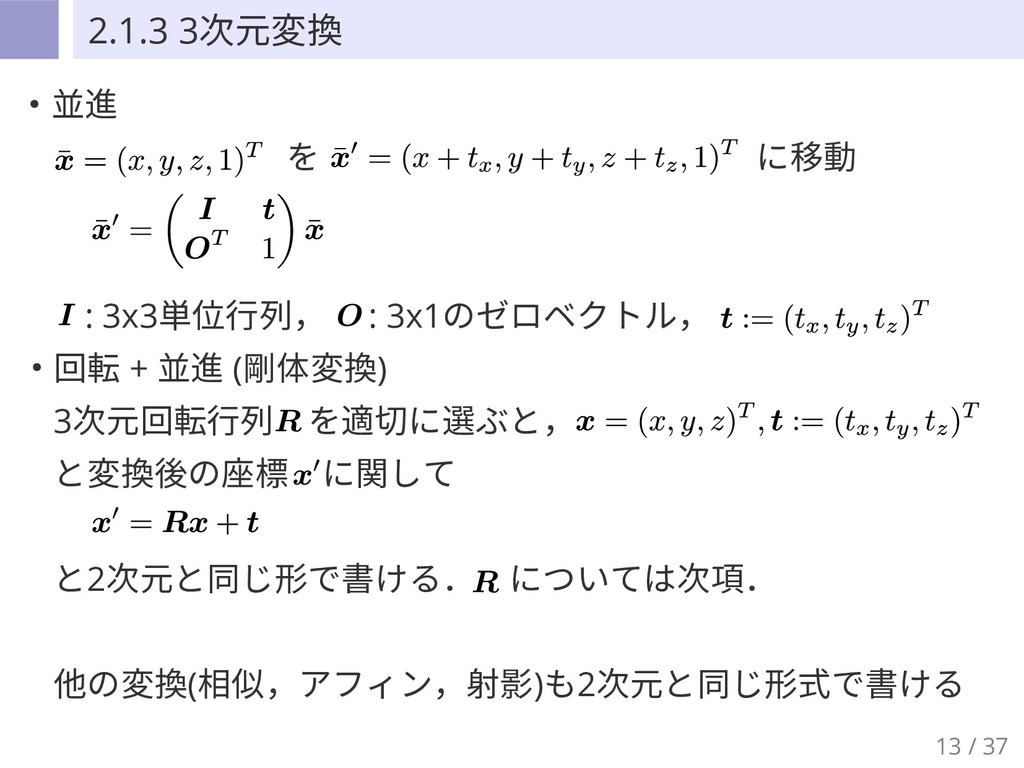
13 / 37 2.1.3 3次元変換 • 並進 を に移動 : 3x3単位行列,
: 3x1のゼロベクトル, • 回転 + 並進 (剛体変換) 3次元回転行列 を適切に選ぶと, と変換後の座標 に関して と2次元と同じ形で書ける. については次項. 他の変換(相似,アフィン,射影)も2次元と同じ形式で書ける
14 / 37 2.1.4 3次元回転 3次元回転行列 は複数の表現がある ・オイラー角 ・回転軸・回転座標表現 ・単位四元数
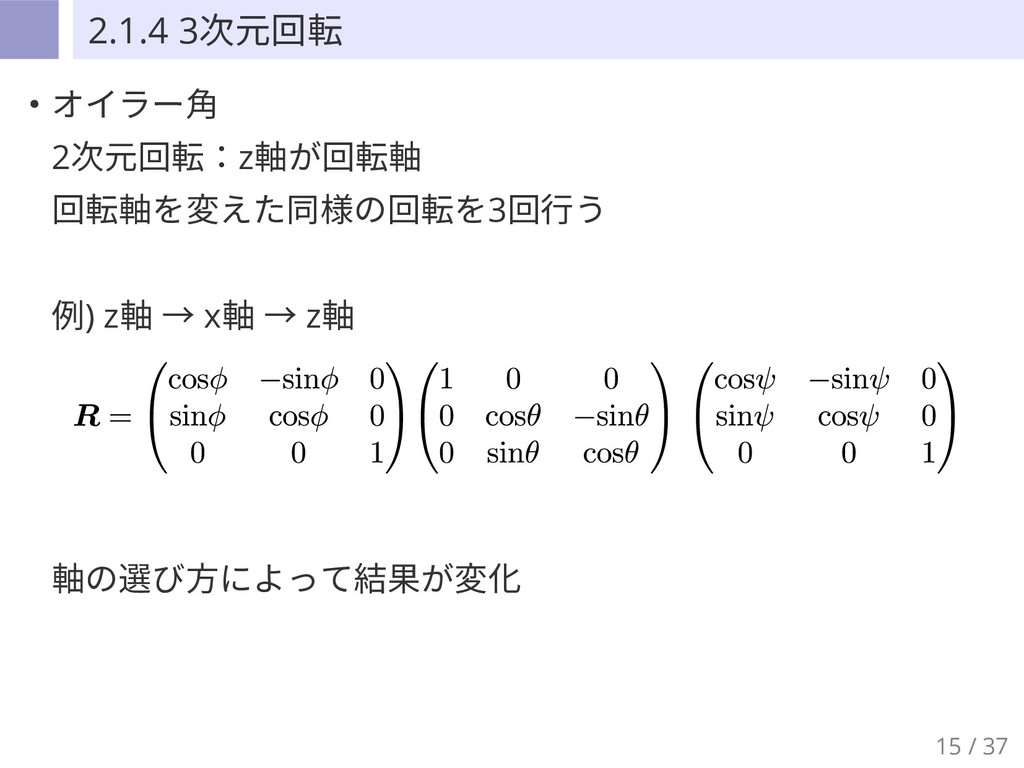
15 / 37 2.1.4 3次元回転 • オイラー角 2次元回転:z軸が回転軸 回転軸を変えた同様の回転を3回行う 例)
z軸 → x軸 → z軸 軸の選び方によって結果が変化
16 / 37 2.1.4 3次元回転 • オイラー角 デモをやれ http://irobutsu.a.la9.jp/mybook/ykwkrAM/sim/EulerAngle.html
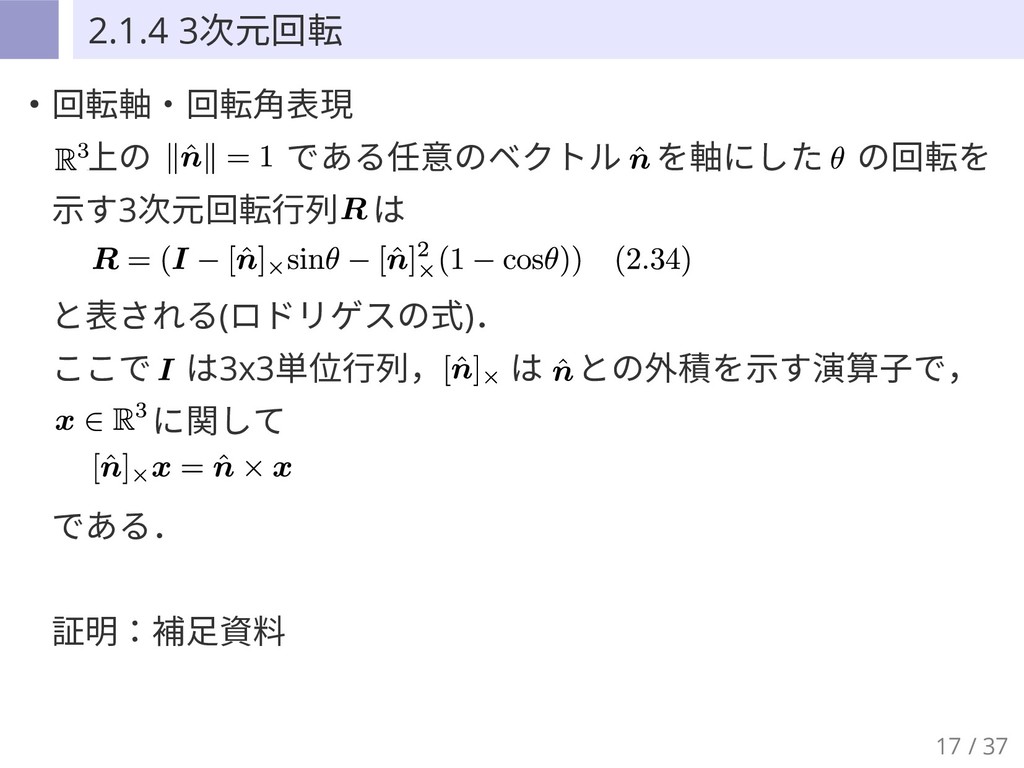
17 / 37 2.1.4 3次元回転 • 回転軸・回転角表現 上の である任意のベクトル を軸にした の回転を 示す3次元回転行列 は と表される(ロドリゲスの式).
ここで は3x3単位行列, は との外積を示す演算子で, に関して である. 証明:補足資料
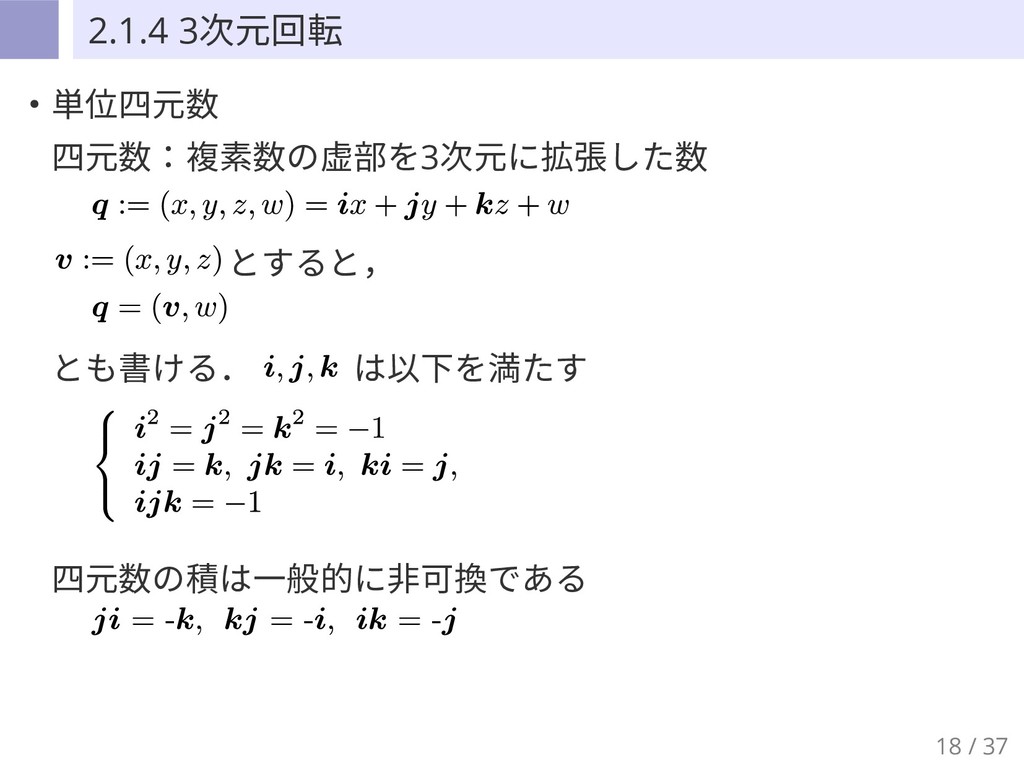
18 / 37 2.1.4 3次元回転 • 単位四元数 四元数:複素数の虚部を3次元に拡張した数 とすると,
とも書ける. は以下を満たす 四元数の積は一般的に非可換である
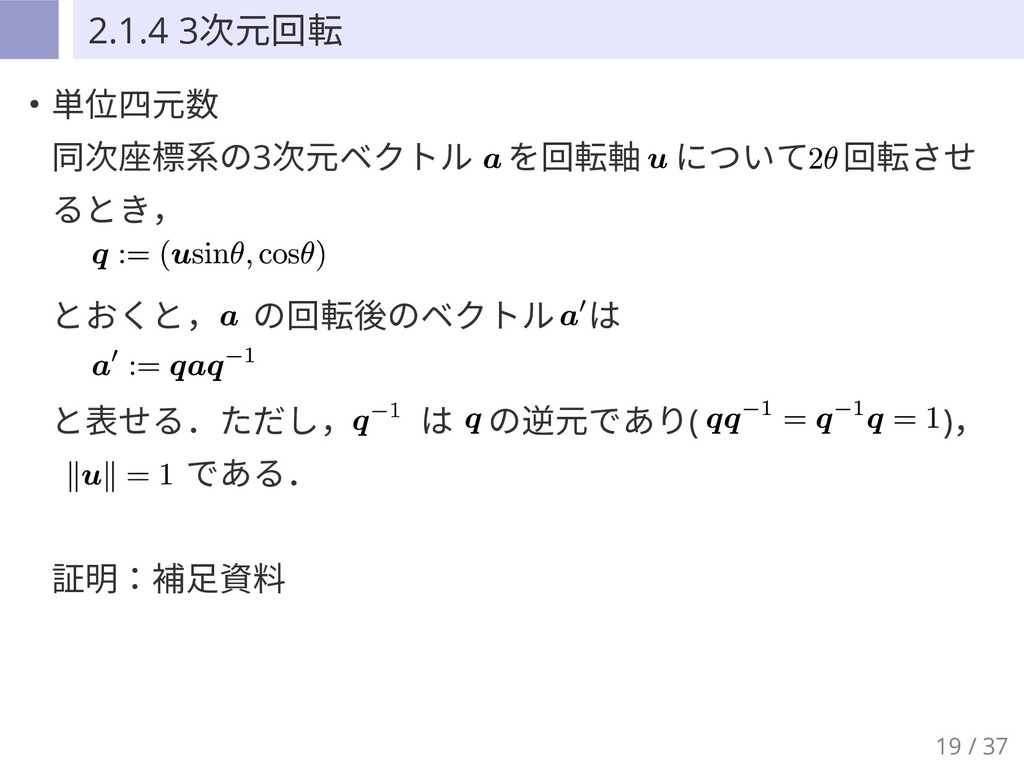
19 / 37 2.1.4 3次元回転 • 単位四元数 同次座標系の3次元ベクトル を回転軸 について 回転させ るとき, とおくと, の回転後のベクトル は
と表せる.ただし, は の逆元であり( ), である. 証明:補足資料
20 / 37 2.1.5 3次元から2次元への射影 3次元の物体を2次元座標上に投影したい ・正射影 ・擬似透視投影 ・弱透視投影 ・透視投影
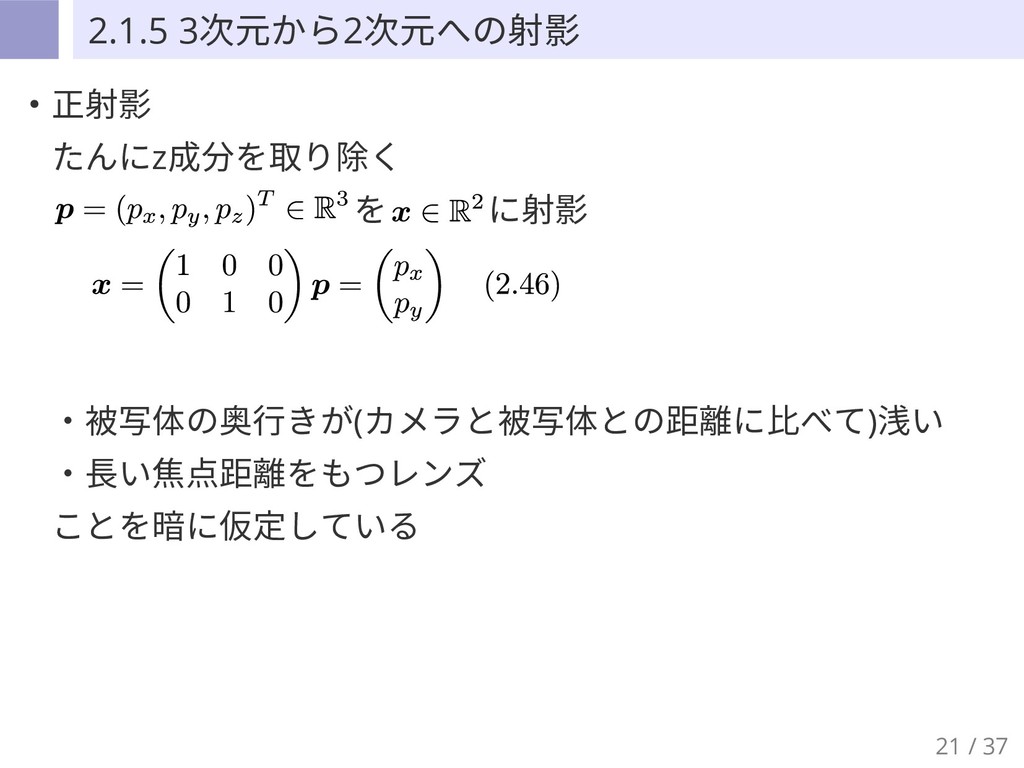
21 / 37 2.1.5 3次元から2次元への射影 • 正射影 たんにz成分を取り除く を に射影 ・被写体の奥行きが(カメラと被写体との距離に比べて)浅い
・長い焦点距離をもつレンズ ことを暗に仮定している
22 / 37 2.1.5 3次元から2次元への射影 • 正射影 (画像: 文献[2]より)
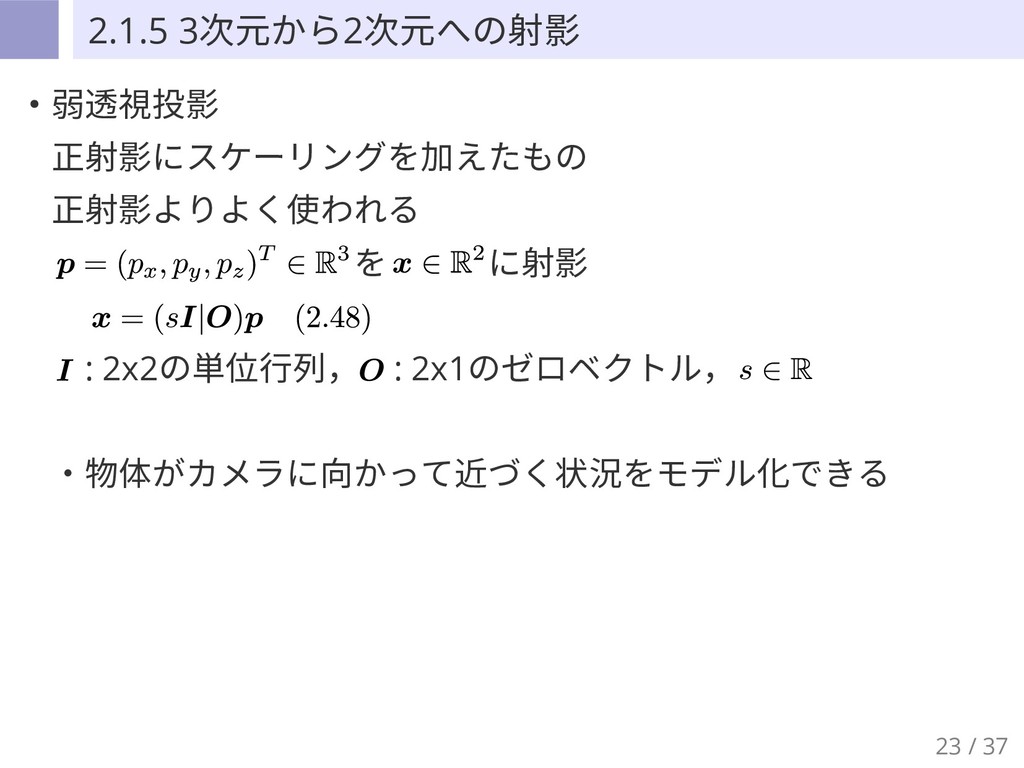
23 / 37 2.1.5 3次元から2次元への射影 • 弱透視投影 正射影にスケーリングを加えたもの 正射影よりよく使われる を に射影
: 2x2の単位行列, : 2x1のゼロベクトル, ・物体がカメラに向かって近づく状況をモデル化できる
24 / 37 2.1.5 3次元から2次元への射影 • 弱透視投影 (画像: 文献[2]より)
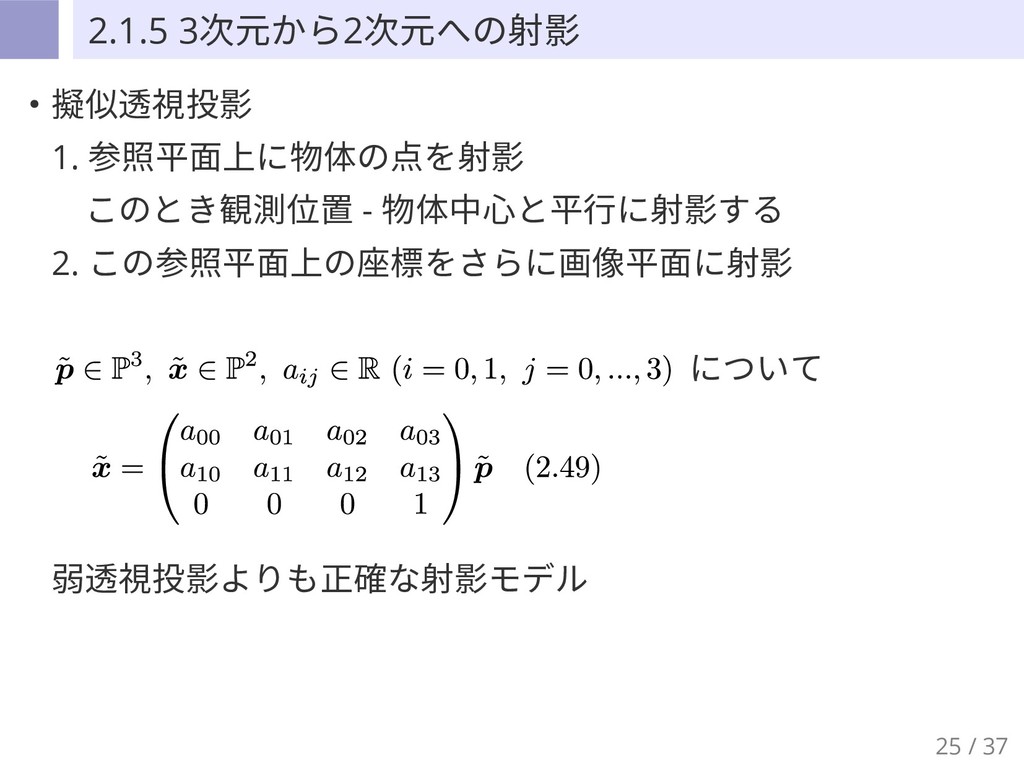
25 / 37 2.1.5 3次元から2次元への射影 • 擬似透視投影 1. 参照平面上に物体の点を射影 このとき観測位置
- 物体中心と平行に射影する 2. この参照平面上の座標をさらに画像平面に射影 について 弱透視投影よりも正確な射影モデル
26 / 37 2.1.5 3次元から2次元への射影 • 擬似透視投影 (画像: 文献[2]より)
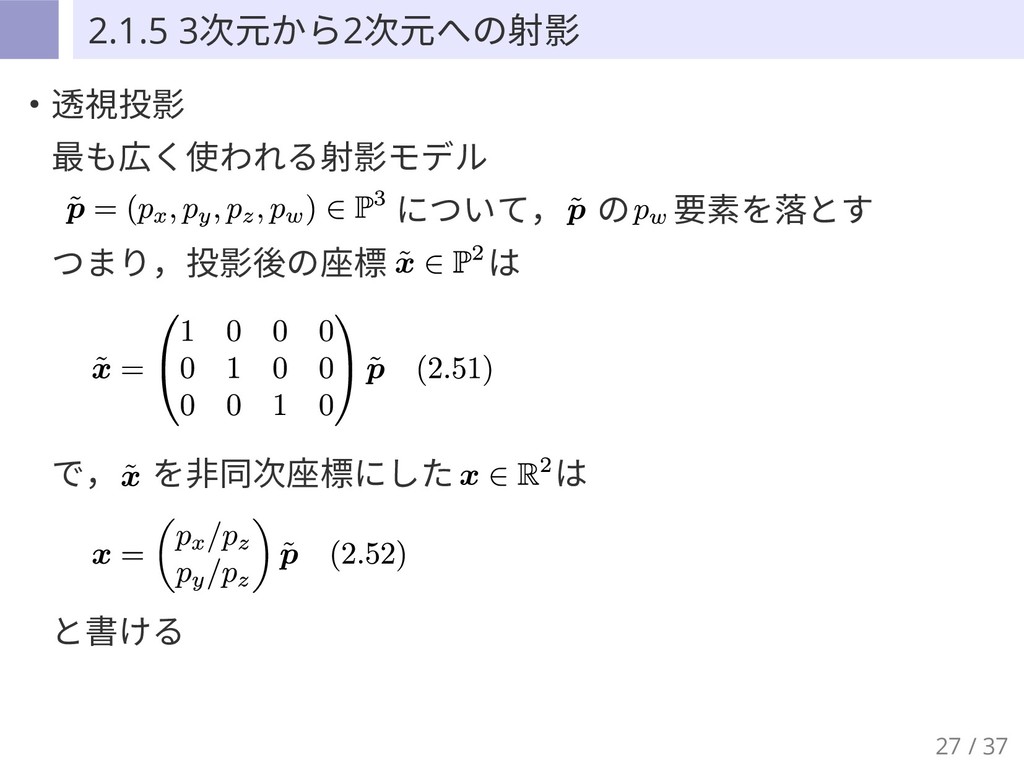
27 / 37 2.1.5 3次元から2次元への射影 • 透視投影 最も広く使われる射影モデル について, の
要素を落とす つまり,投影後の座標 は で, を非同次座標にした は と書ける
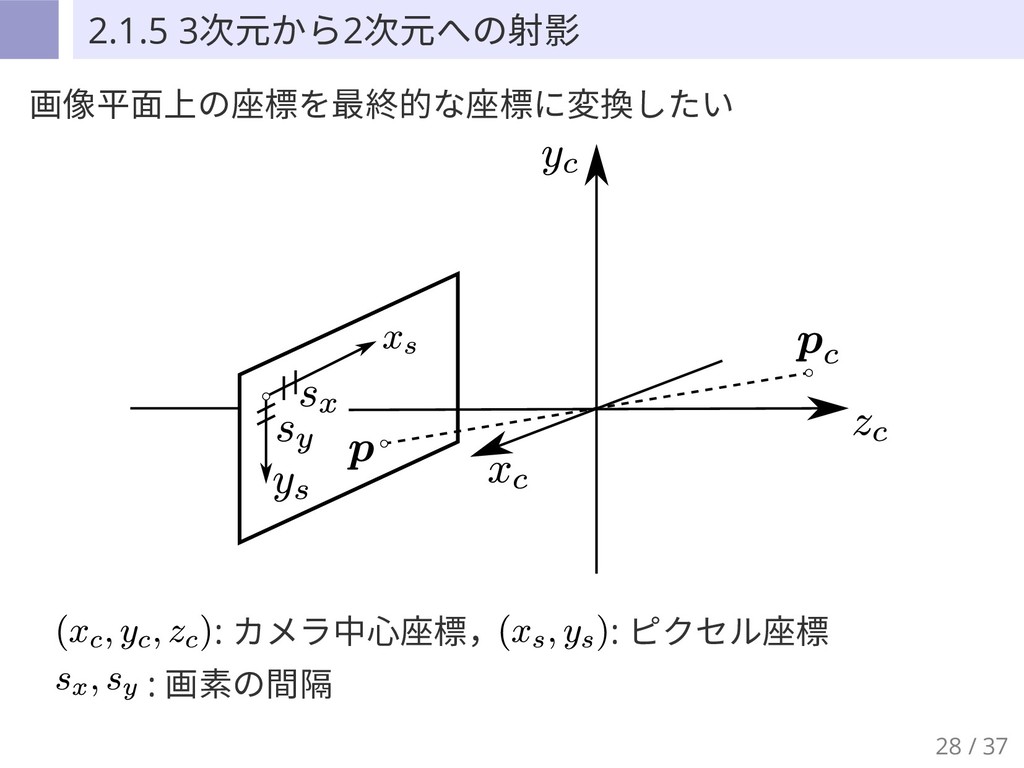
28 / 37 2.1.5 3次元から2次元への射影 画像平面上の座標を最終的な座標に変換したい : カメラ中心座標, :
ピクセル座標 : 画素の間隔
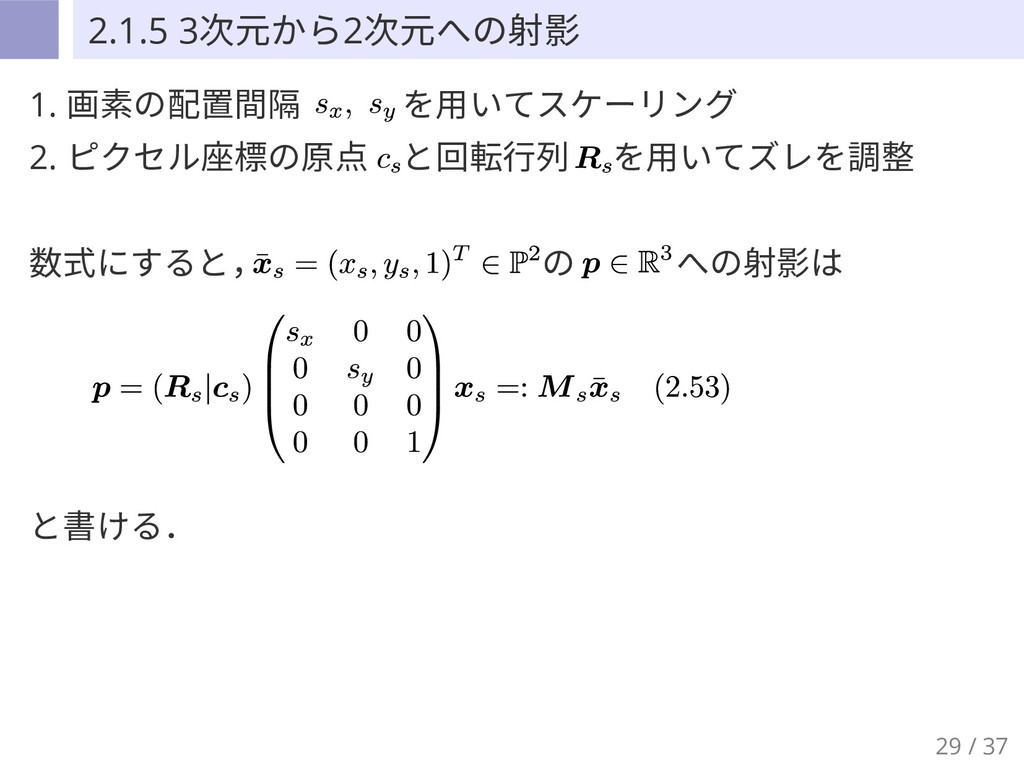
29 / 37 2.1.5 3次元から2次元への射影 1. 画素の配置間隔 を用いてスケーリング 2. ピクセル座標の原点 と回転行列 を用いてズレを調整
数式にすると, の への射影は と書ける.
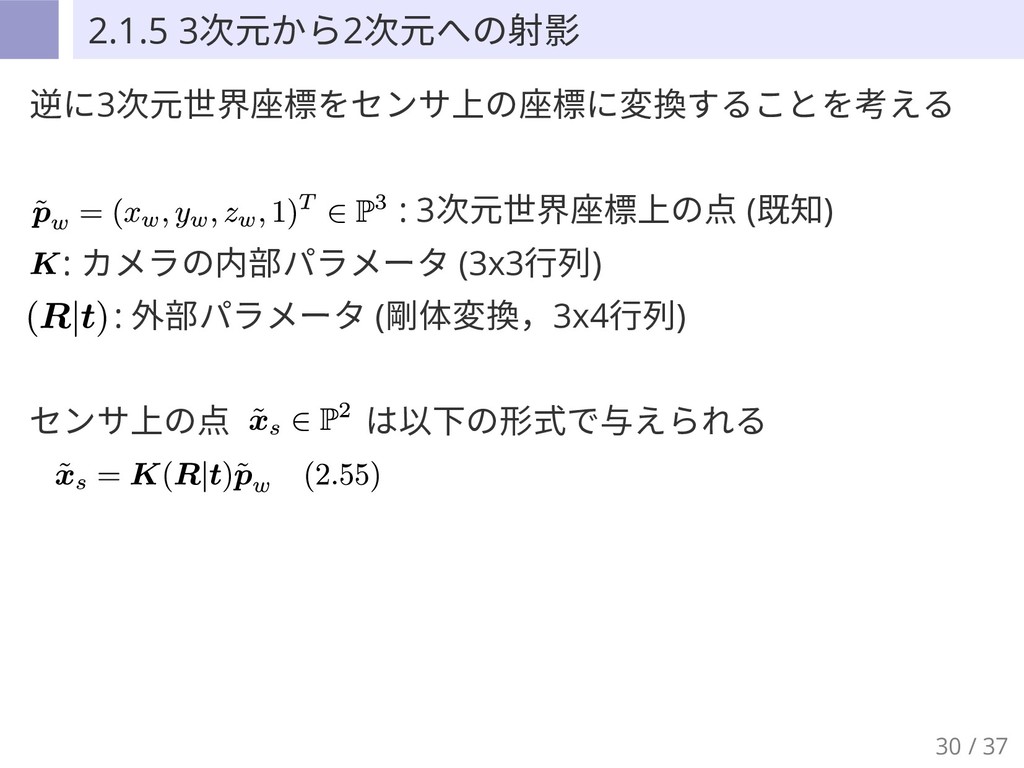
30 / 37 2.1.5 3次元から2次元への射影 逆に3次元世界座標をセンサ上の座標に変換することを考える : 3次元世界座標上の点 (既知) :
カメラの内部パラメータ (3x3行列) : 外部パラメータ (剛体変換,3x4行列) センサ上の点 は以下の形式で与えられる
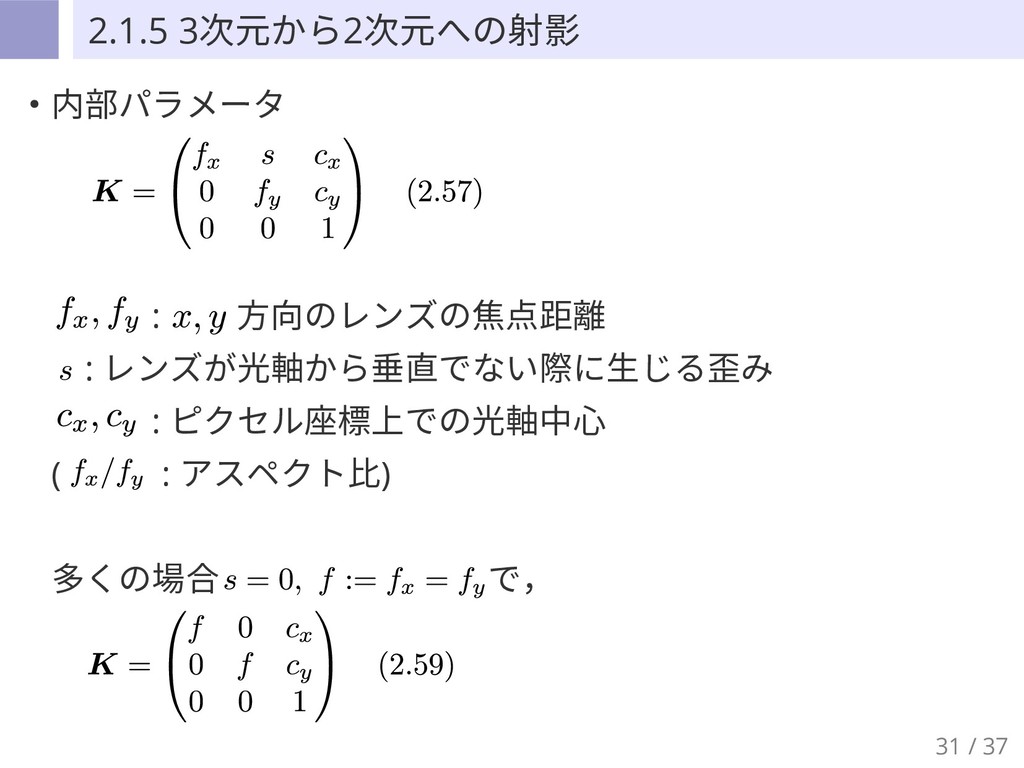
31 / 37 2.1.5 3次元から2次元への射影 • 内部パラメータ : 方向のレンズの焦点距離 :
レンズが光軸から垂直でない際に生じる歪み : ピクセル座標上での光軸中心 ( : アスペクト比) 多くの場合 で,
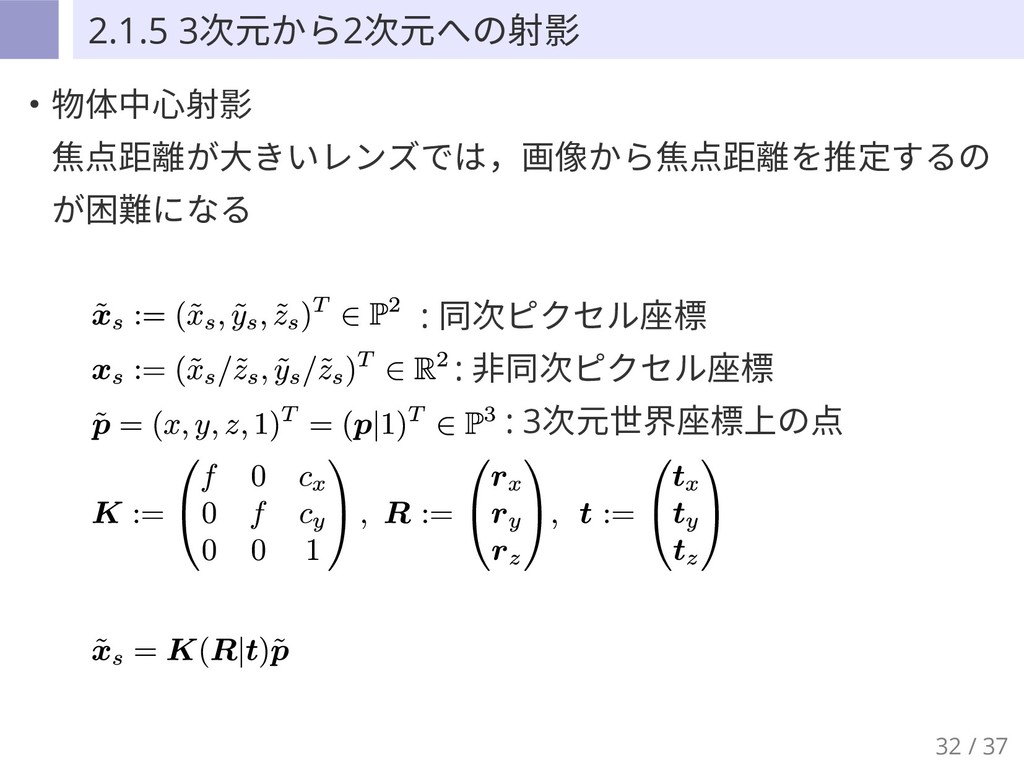
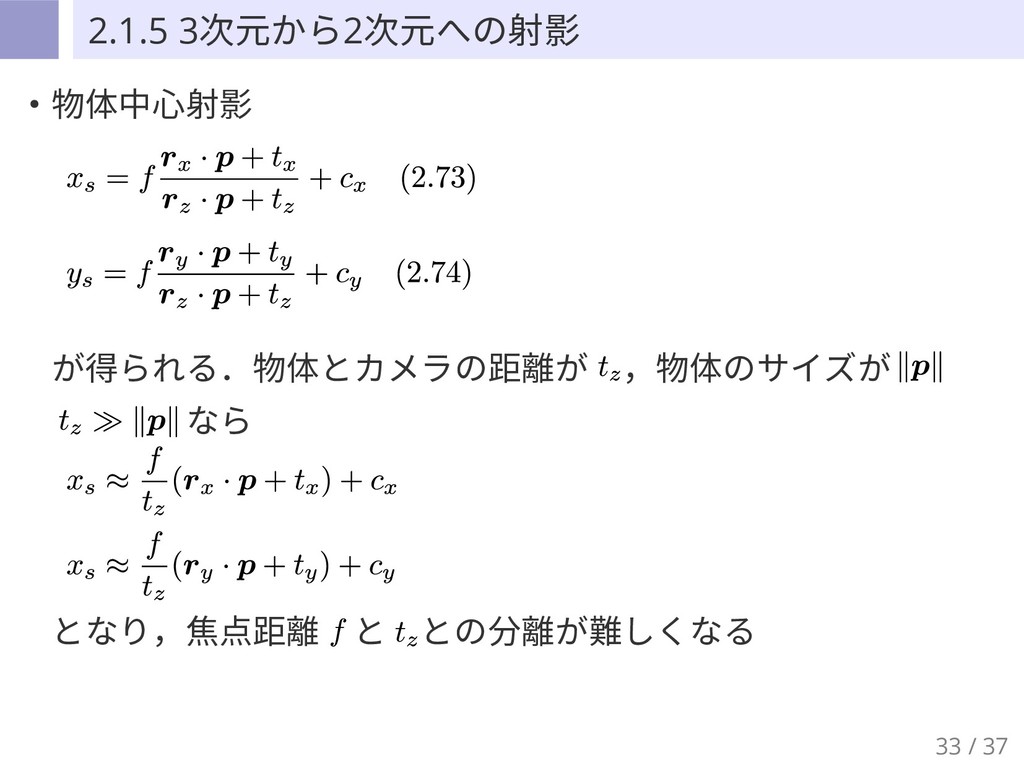
32 / 37 2.1.5 3次元から2次元への射影 • 物体中心射影 焦点距離が大きいレンズでは,画像から焦点距離を推定するの が困難になる :
同次ピクセル座標 : 非同次ピクセル座標 : 3次元世界座標上の点
33 / 37 2.1.5 3次元から2次元への射影 • 物体中心射影 が得られる.物体とカメラの距離が ,物体のサイズが なら となり,焦点距離 と との分離が難しくなる
34 / 37 2.1.6 レンズ歪み 広角レンズでは歪曲収差が発生する (画像: 文献[1]より) 樽型歪み 糸巻き型歪み
魚眼レンズ
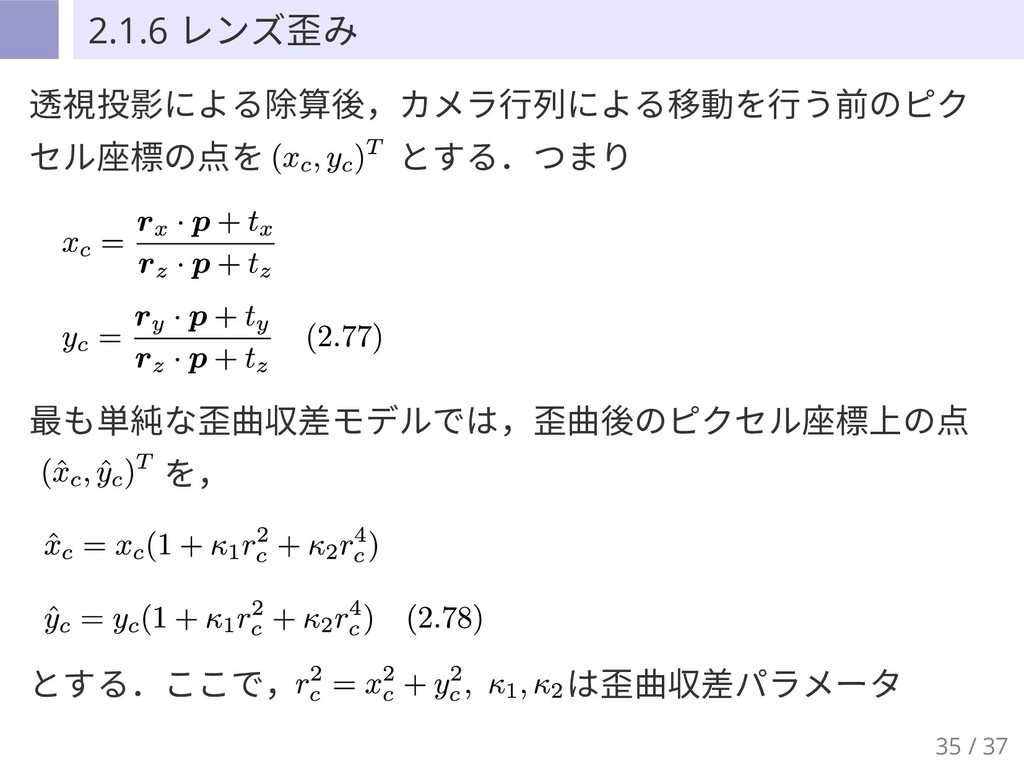
35 / 37 2.1.6 レンズ歪み 透視投影による除算後,カメラ行列による移動を行う前のピク セル座標の点を とする.つまり 最も単純な歪曲収差モデルでは,歪曲後のピクセル座標上の点 を, とする.ここで, は歪曲収差パラメータ
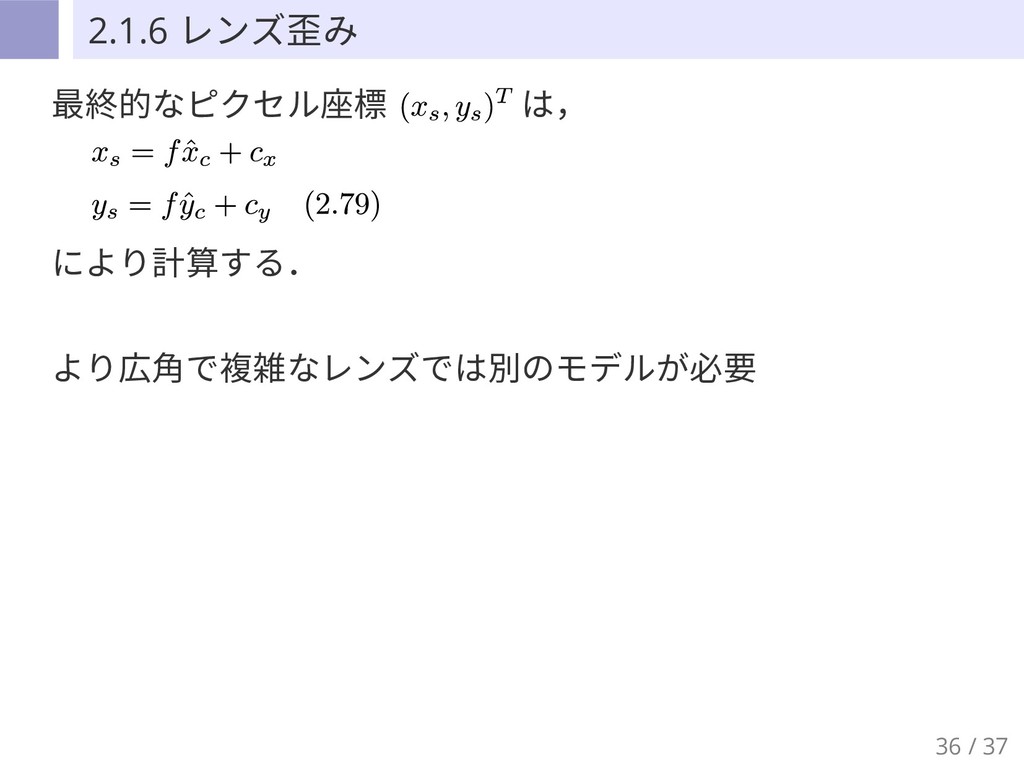
36 / 37 2.1.6 レンズ歪み 最終的なピクセル座標 は, により計算する. より広角で複雑なレンズでは別のモデルが必要
37 / 37 参考 [1] Computer Vision: Algorithms and Appliucations,
Richard Szeliski, http://szeliski.org/Book/drafts/SzeliskiBook_20100903_draft.pdf (2018/05/02 閲覧) [2] Camera Models,杉本晃宏, http://research.nii.ac.jp/~sugimoto/lecture/computer_vision/CameraModels.pdf (2018/04/30 閲覧) [3] Quaternionによる3次元の回転変換,平鍋健児, https://qiita.com/kenjihiranabe/items/945232fbde58fab45681 (2018/04/29 閲覧)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![22 / 37 2.1.5 3次元から2次元への射影 • 正射影 (画像: 文献[2]より)](https://files.speakerdeck.com/presentations/977484001be148fab6cc1ccde1493614/slide_21.jpg){kind=link}
{kind=link}
![24 / 37 2.1.5 3次元から2次元への射影 • 弱透視投影 (画像: 文献[2]より)](https://files.speakerdeck.com/presentations/977484001be148fab6cc1ccde1493614/slide_23.jpg){kind=link}
{kind=link}
![26 / 37 2.1.5 3次元から2次元への射影 • 擬似透視投影 (画像: 文献[2]より)](https://files.speakerdeck.com/presentations/977484001be148fab6cc1ccde1493614/slide_25.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![34 / 37 2.1.6 レンズ歪み 広角レンズでは歪曲収差が発生する (画像: 文献[1]より) 樽型歪み 糸巻き型歪み](https://files.speakerdeck.com/presentations/977484001be148fab6cc1ccde1493614/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
![37 / 37 参考 [1] Computer Vision: Algorithms and Appliucations,](https://files.speakerdeck.com/presentations/977484001be148fab6cc1ccde1493614/slide_36.jpg){kind=link}