Share
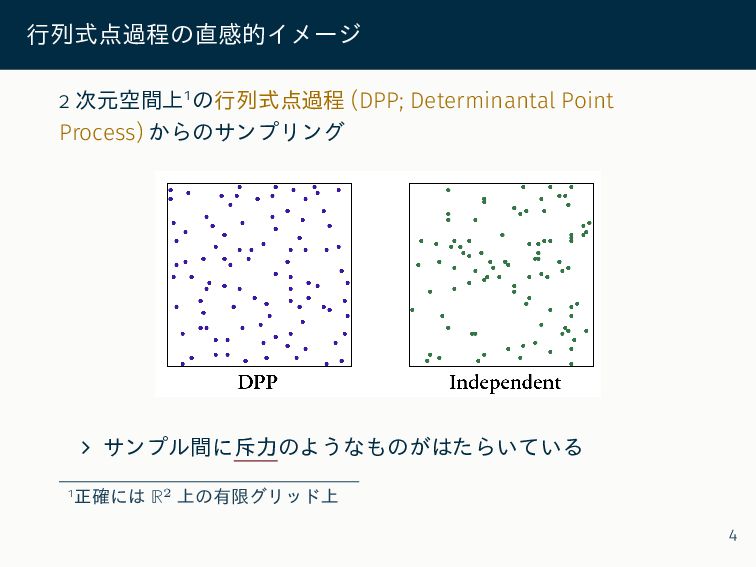
行列式点過程のレビュー論文 "Determinantal point processes for machine learning" から,その概念的な理解にとくに重要と思われる部分を抜き出して紹介したものです.
{kind=link}
{kind=link}
{kind=link}
![これなに? 行列式点過程に関する次のレビュー論文の超要約です: • “Determinantal Point Processes for Machine Learning,” [arXiv:1207.6083].](https://files.speakerdeck.com/presentations/7b707d59f9c44951a0935eca3bffabfb/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}