Lyapunov Control for Flat Spin Recovery and Spin Inversion
I developed new control laws for stabilizing a tumbling spacecraft using reaction wheels. This presentation is from the 2016 AIAA Astrodynamics Specialist Conference.
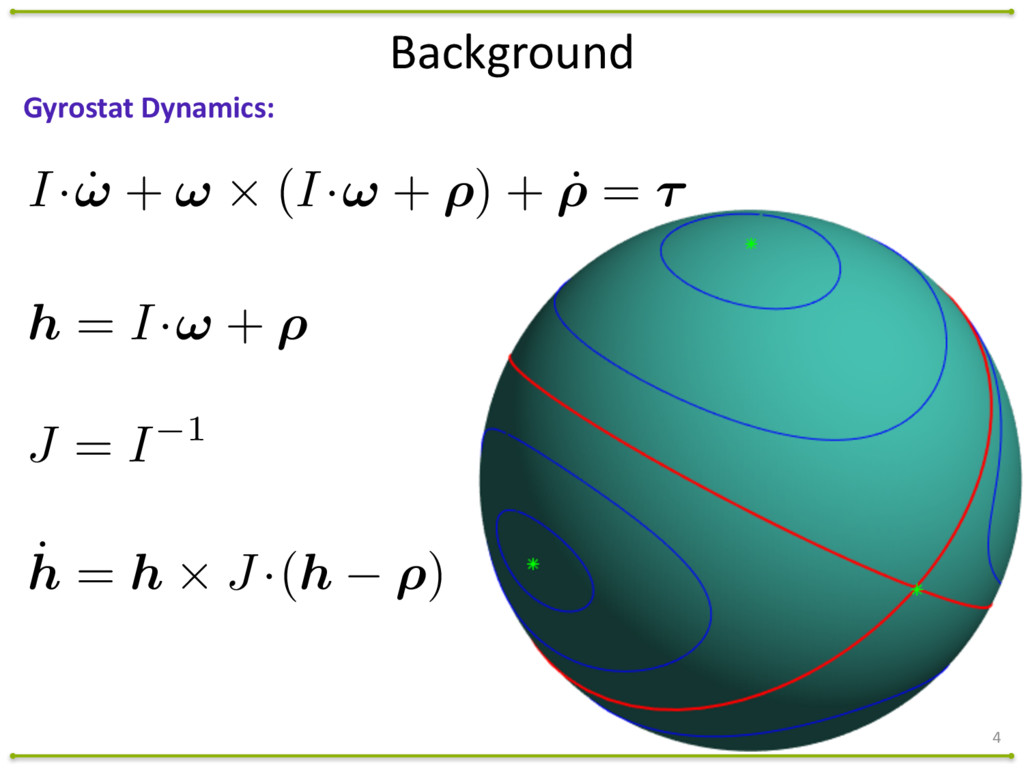
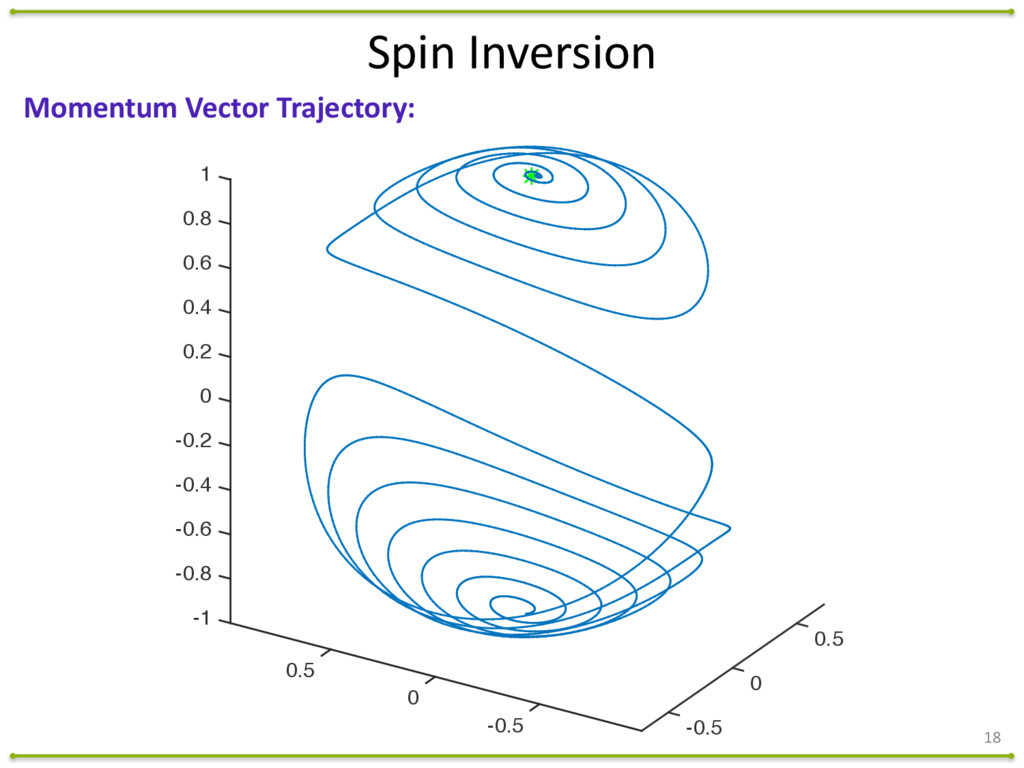
from arbitrary initial conditions • Align + face of the spacecraft with the angular momentum vector Constraints: • Limited reaction wheel torque • Limited angular momentum storage in reaction wheels Motivation
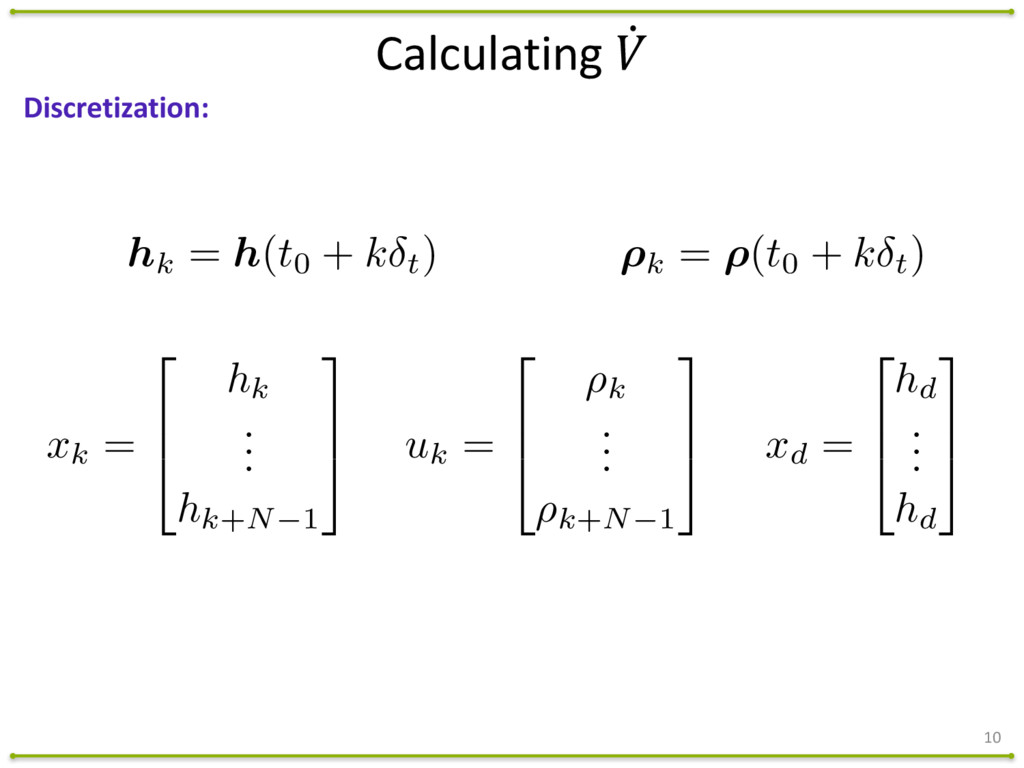
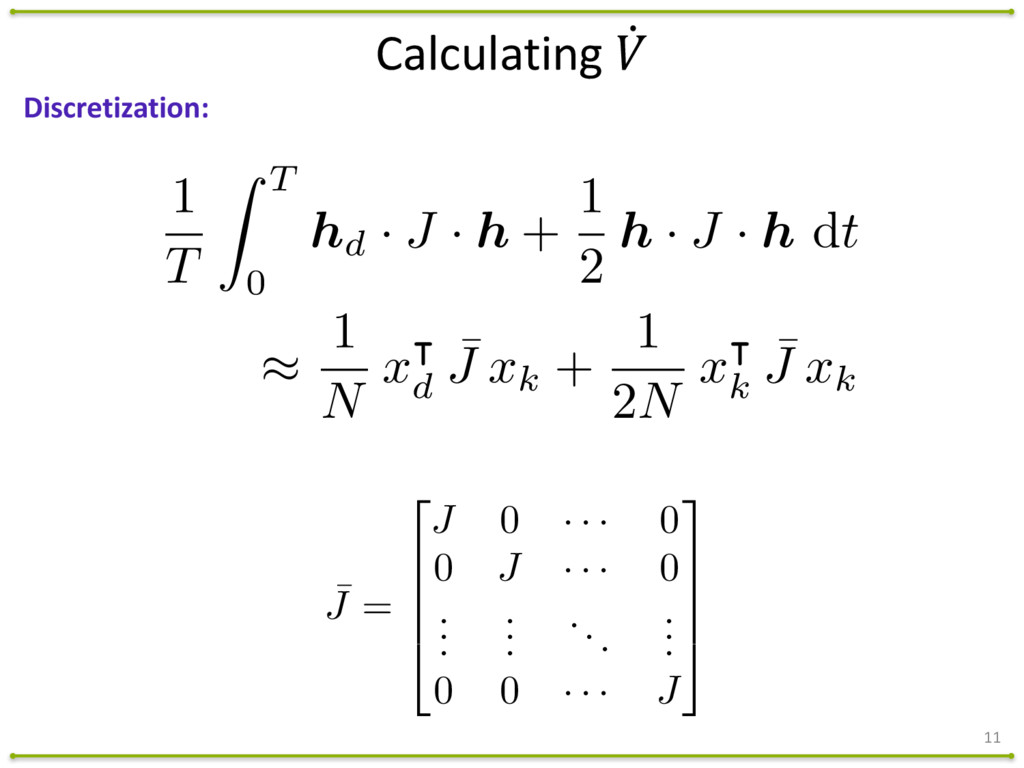
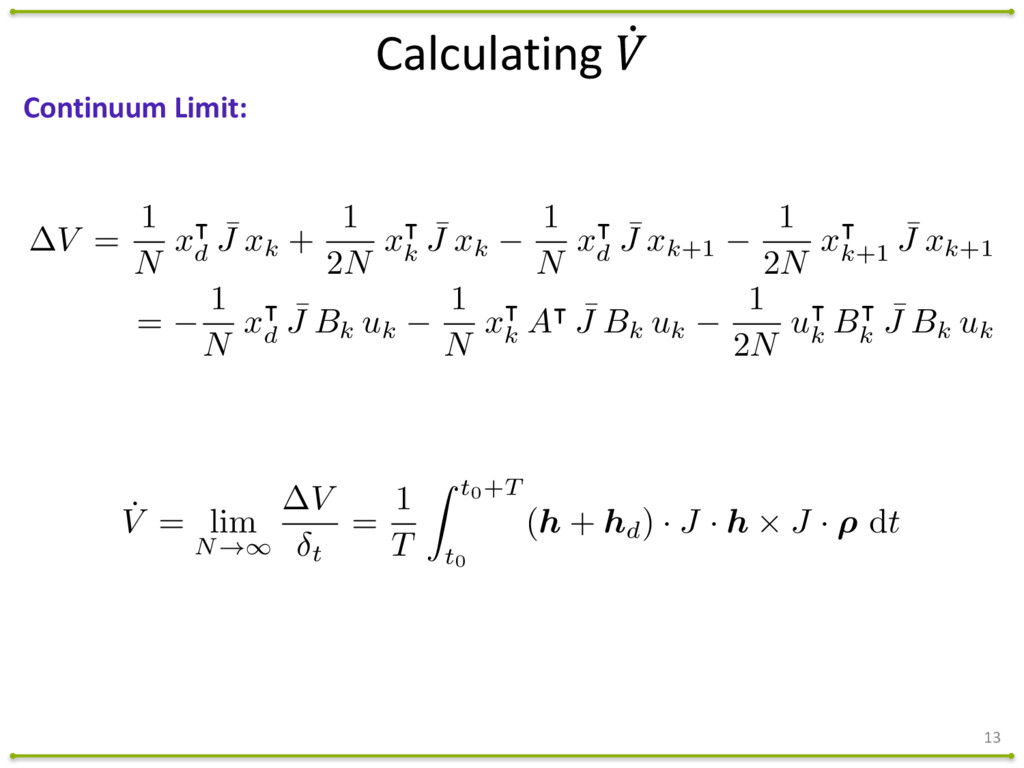
¯ J xk + 1 2 N x | k ¯ J xk 1 N x | d ¯ J xk+1 1 2 N x | k+1 ¯ J xk+1 = 1 N x | d ¯ J Bk uk 1 N x | k A | ¯ J Bk uk 1 2 N u | k B | k ¯ J Bk uk ˙ V = lim N!1 V t = 1 T Z t0+T t0 (h + hd) · J · h ⇥ J · ⇢ dt Calculating ̇
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![20 [email protected] Questions?](https://files.speakerdeck.com/presentations/7e7260a2c47e44019f9dd006e22a516f/slide_19.jpg){kind=link}