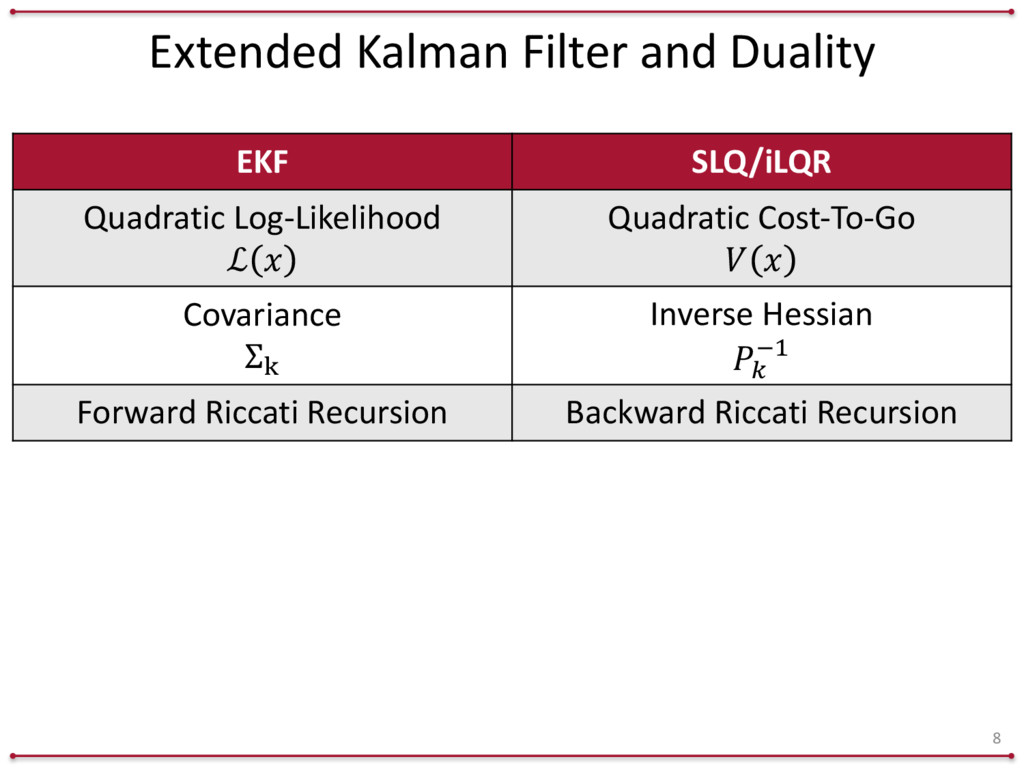
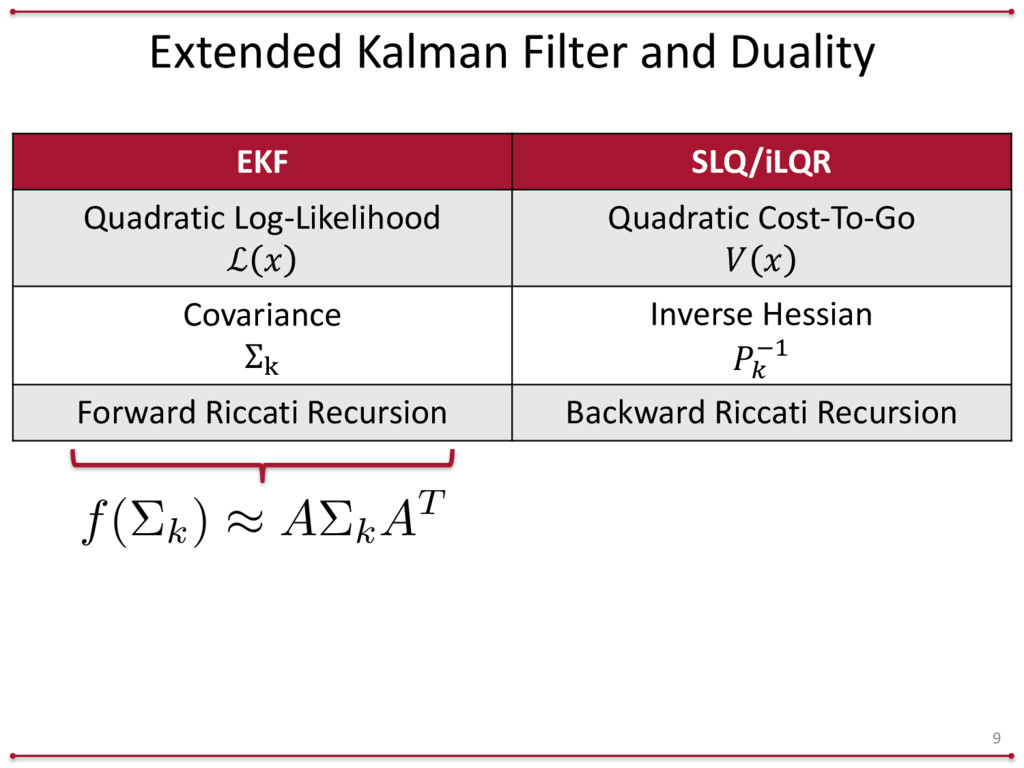
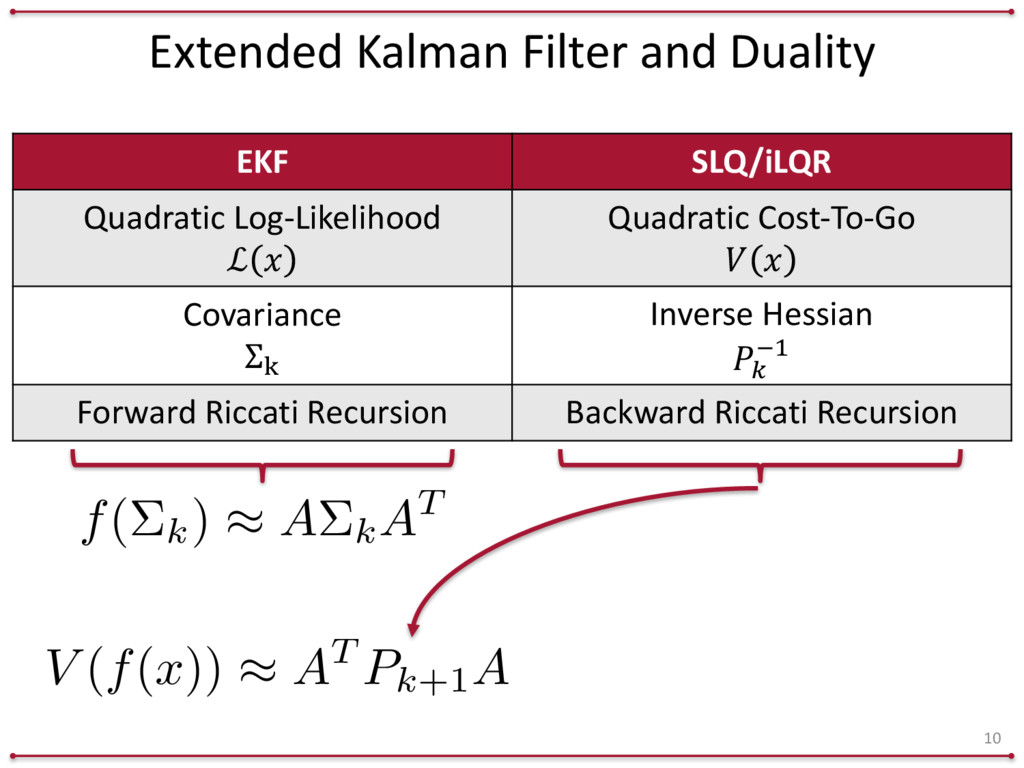
ℒ Quadratic Cost-‐To-‐Go Covariance Σ% Inverse Hessian ' () Forward Riccati Recursion Backward Riccati Recursion f(⌃k) ⇡ A⌃kAT V ( f ( x )) ⇡ A T Pk+1A = A 1 P 1 k+1A T 1
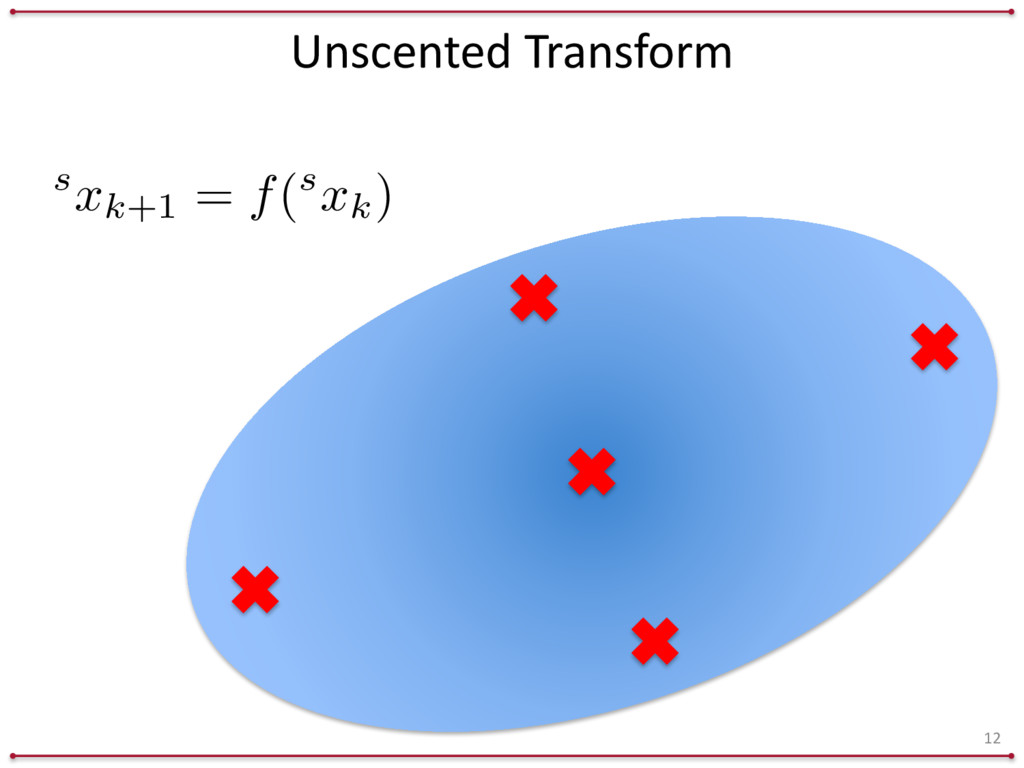
Perform unscented backward recursion to compute ' and ' = ' − ' 3. Perform forward pass with line search to compute new ' and ' trajectories 4. Repeat until convergence
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![20 agile.seas.harvard.edu [email protected] Conclusions • Dynamics derivatives can be eliminated](https://files.speakerdeck.com/presentations/6ec855f355194edb833eb45f63ed3bb3/slide_20.jpg){kind=link}