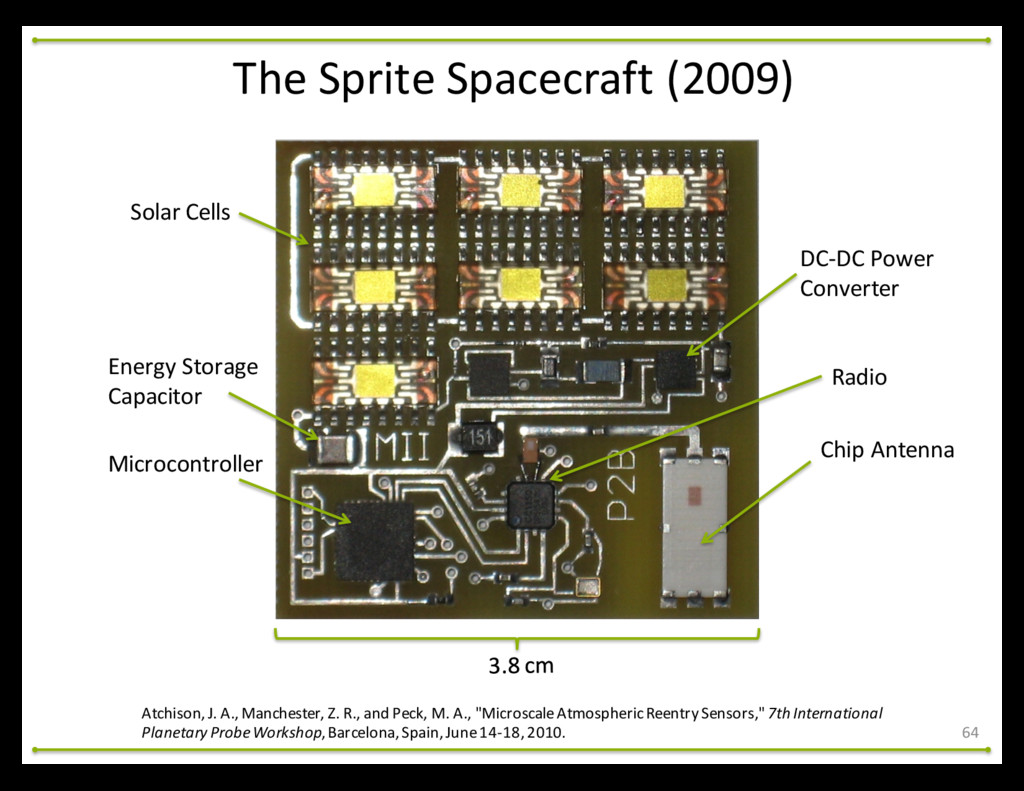
for 21st Century Missions,” AIAA Space Technology Conference and Exposition, Albuquerque, NM, Sept. 28-‐30, 1999. Barnhart, D. J., Vladimirova, T., and Sweeting, M. N., “Satellite-‐on-‐a-‐ Chip Development for Future Distributed Space Missions,” CANEUS 2006 Conference, Aug. 27-‐Sept. 1, 2006. Barnhart, D. J., Vladimirova, T., Baker, A. M., and Sweeting, M. N., “A Low-‐Cost Femtosatellite to Enable Distributed Space Missions,” 57th International Astronautical Congress, Valencia, Spain, Oct. 2-‐6, 2006. Barnhart, D. J., Vladimirova, T., and Sweeting, M. N., “Very-‐Small-‐Satellite Design for Distributed Space Missions,” Journal of Spacecraft and Rockets, Vol. 46, No. 2, 2009, pp. 469-‐472. Atchison, J. A., and Peck, M. A., “A Millimeter-‐Scale Lorentz-‐Propelled Spacecraft,” AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, Aug 20-‐23, 2007. Atchison, J. A., Manchester, Z. R., and Peck, M. A., "MicroscaleAtmospheric Reentry Sensors," 7th International Planetary Probe Workshop, Barcelona, Spain, June 14-‐18, 2010. Atchison, J. A., and Peck, M. A., “A Passive, Sun-‐Pointing, Millimeter-‐Scale Solar Sail,” Acta Astronautica, 2010, Vol. 67, No. 1, pp. 108-‐121. Atchison, J. A., and Peck, M. A., “Length Scaling in Spacecraft Dynamics,” Journal of Guidance, Control, and Dynamics, Vol. 34, No. 1, 2011, pp. 231-‐246. Colombo, C., and McInnes, C. R., “Orbital dynamics of Earth-‐orbiting ‘smart-‐dust’ spacecraft under the effects of solar radiation pressure and aerodynamic drag,” AIAA/AAS Astrodynamics Specialist Conference, Toronto, Canada, Aug. 2-‐5, 2010. Colombo, C., and McInnes, C. R., “Orbit Design for Future Spacechip Swarm Missions,” 61st International Astronautical Congress, Prague, Czech Republic, Sept. 27-‐Oct. 1, 2010. McInnes, C. R., Ceriotti, M., Colombo, C., et. Al., “Micro-‐to-‐Macro: Astrodynamicsat Extremes of Length-‐scale,” Acta Futura, Vol. 4, 2011, pp. 81-‐97. Colombo, C., Lucking, C., and McInnes, C. R., “Orbital dynamics of high area-‐to-‐mass ratio spacecraft with J2 and solar radiation pressure for novel Earth observation and communication services,” Acta Astronautica, Vol. 81, No. 1, 2012, pp. 137-‐150. Centimeter-‐Scale Spacecraft
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}