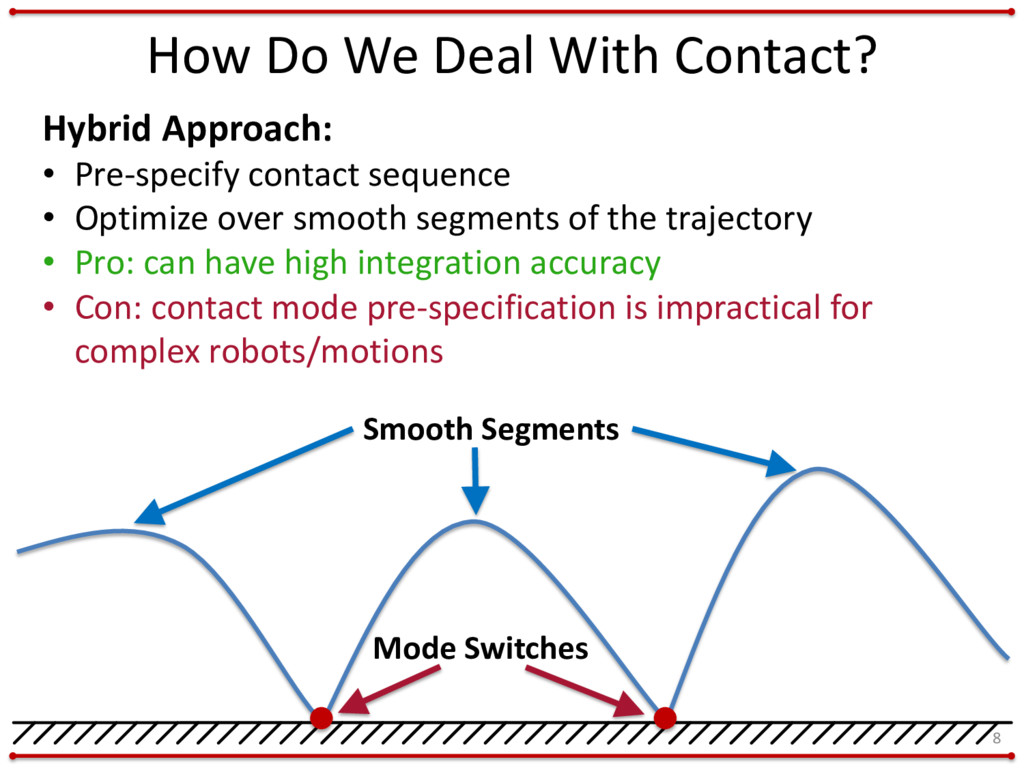
Pre-specify contact sequence • Optimize over smooth segments of the trajectory • Pro: can have high integration accuracy • Con: contact mode pre-specification is impractical for complex robots/motions Smooth Segments Mode Switches
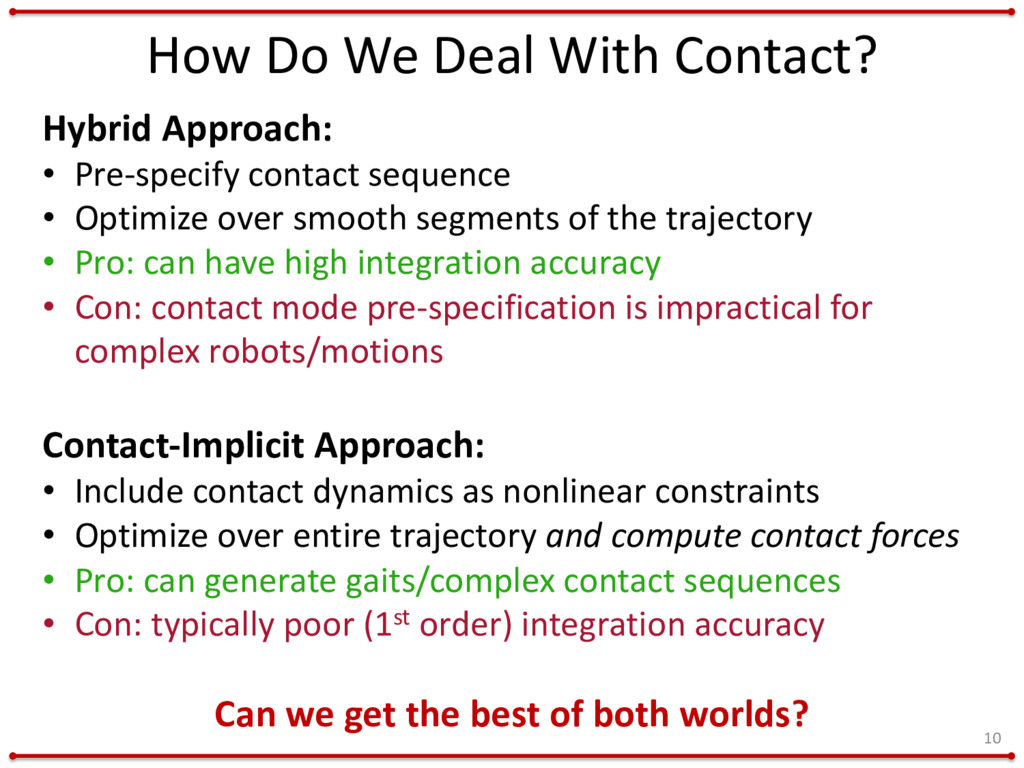
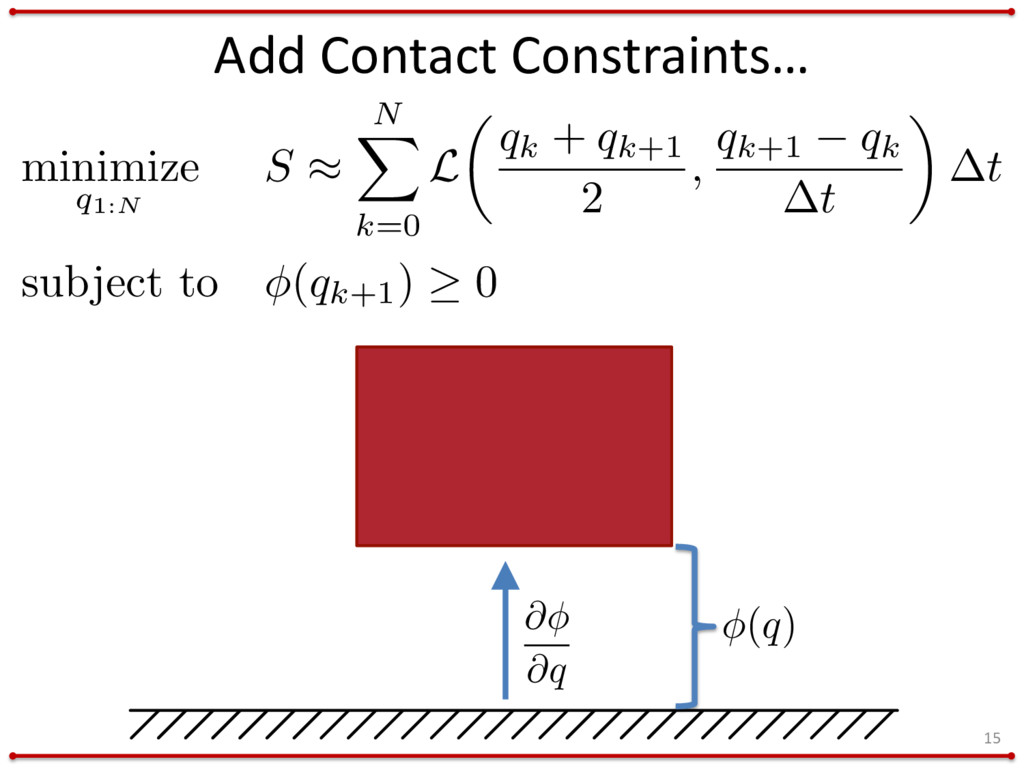
Pre-specify contact sequence • Optimize over smooth segments of the trajectory • Pro: can have high integration accuracy • Con: contact mode pre-specification is impractical for complex robots/motions Contact-Implicit Approach: • Include contact dynamics as nonlinear constraints • Optimize over entire trajectory and compute contact forces • Pro: can generate gaits/complex contact sequences • Con: typically poor (1st order) integration accuracy
Pre-specify contact sequence • Optimize over smooth segments of the trajectory • Pro: can have high integration accuracy • Con: contact mode pre-specification is impractical for complex robots/motions Contact-Implicit Approach: • Include contact dynamics as nonlinear constraints • Optimize over entire trajectory and compute contact forces • Pro: can generate gaits/complex contact sequences • Con: typically poor (1st order) integration accuracy Can we get the best of both worlds?
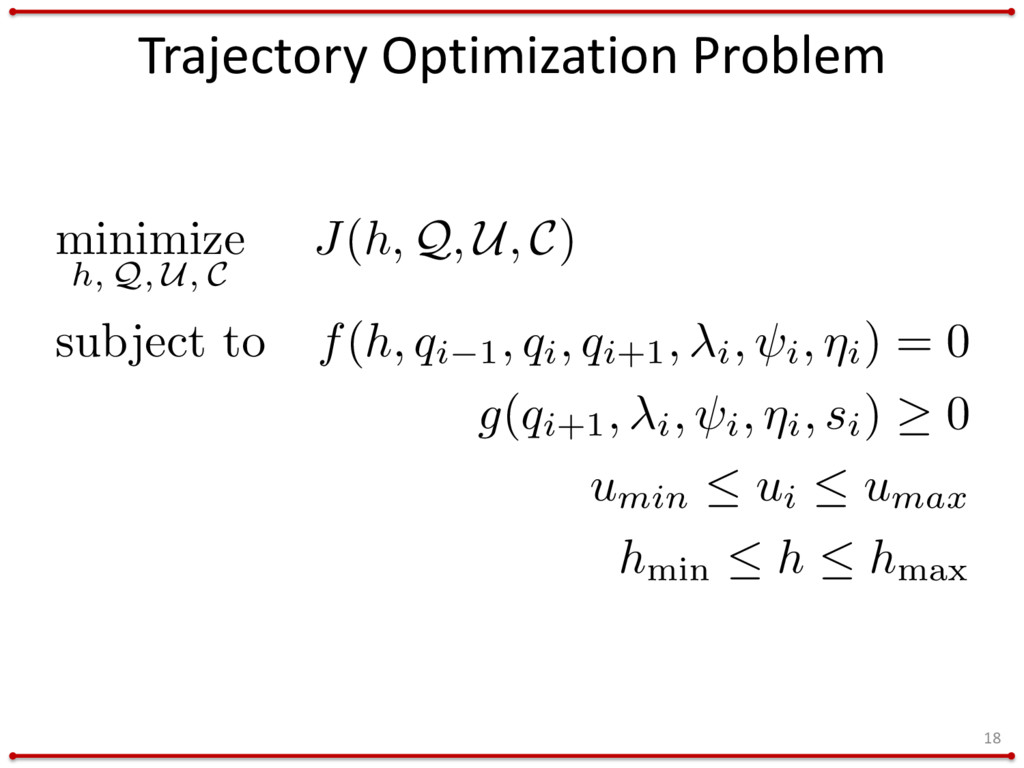
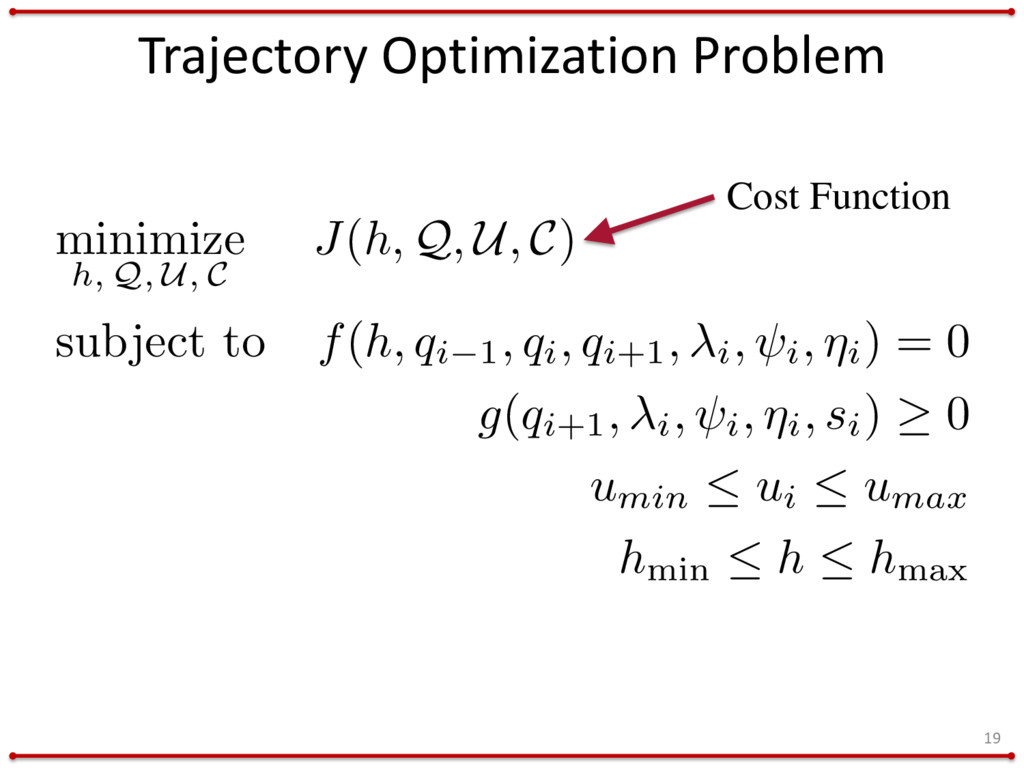
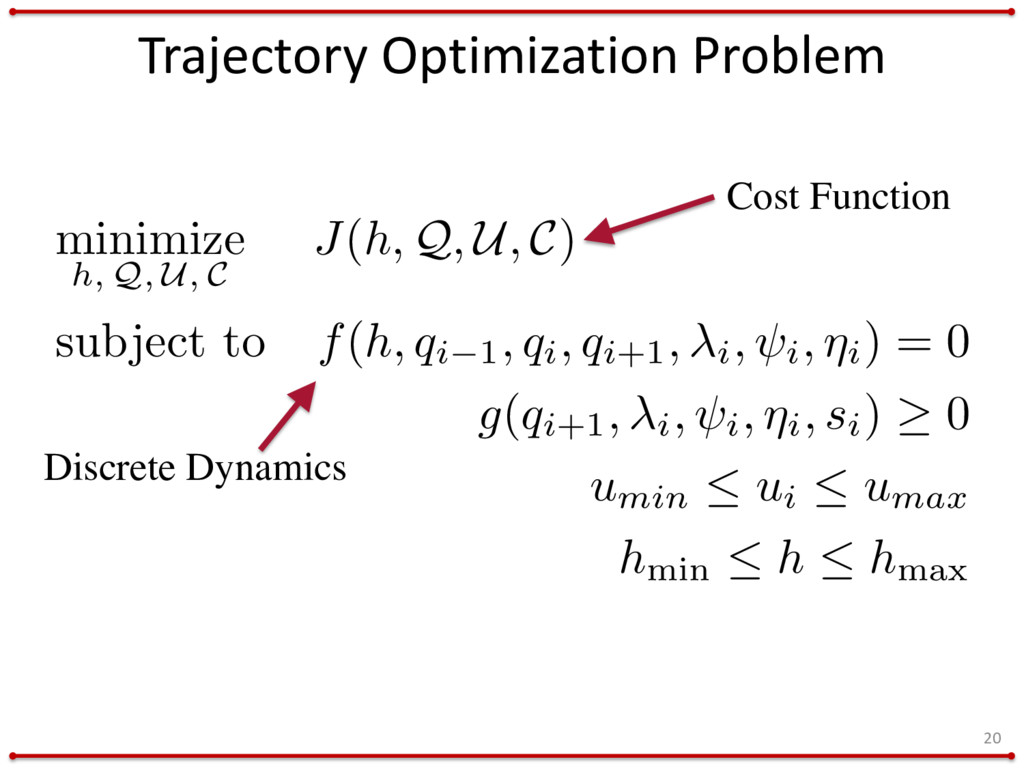
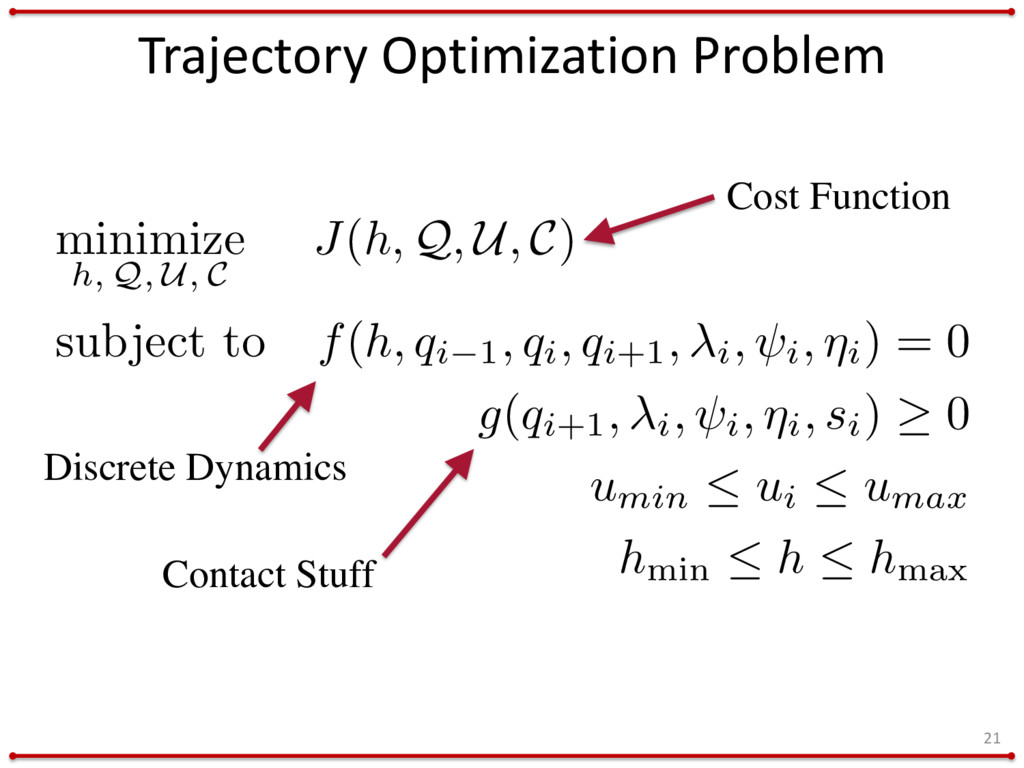
Q, U, C) subject to f(h, qi 1, qi, qi+1, i, i, ⌘i) = 0 g(qi+1, i, i, ⌘i, si) 0 umin ui umax hmin h hmax Discrete Dynamics Contact Stuff Cost Function
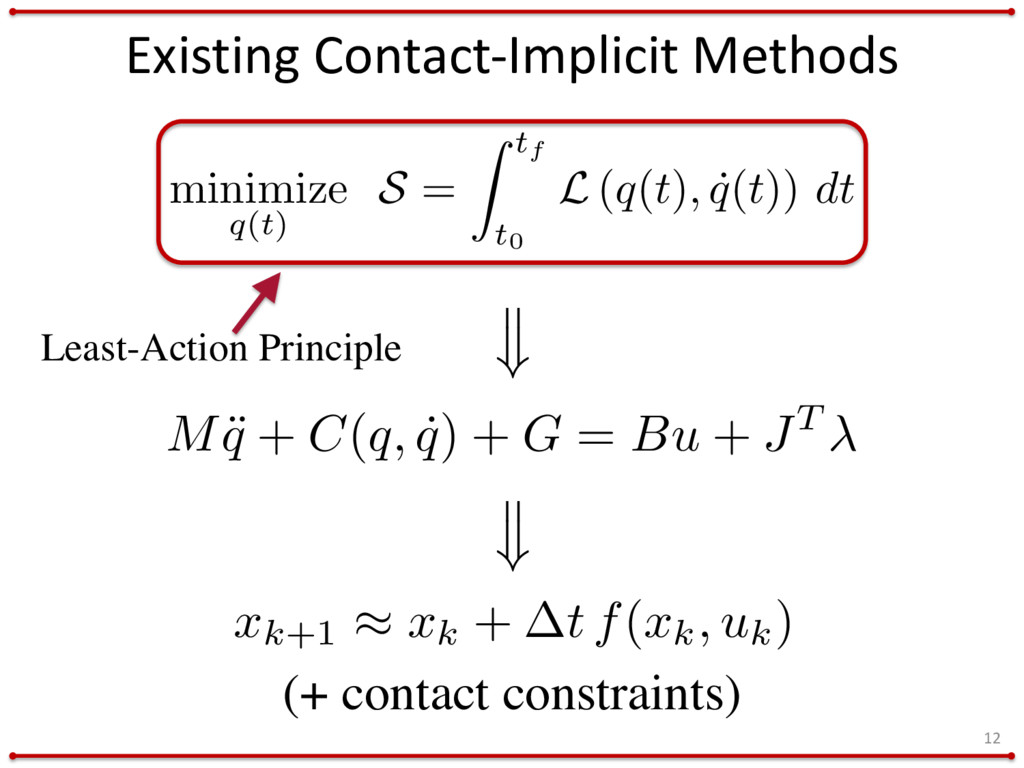
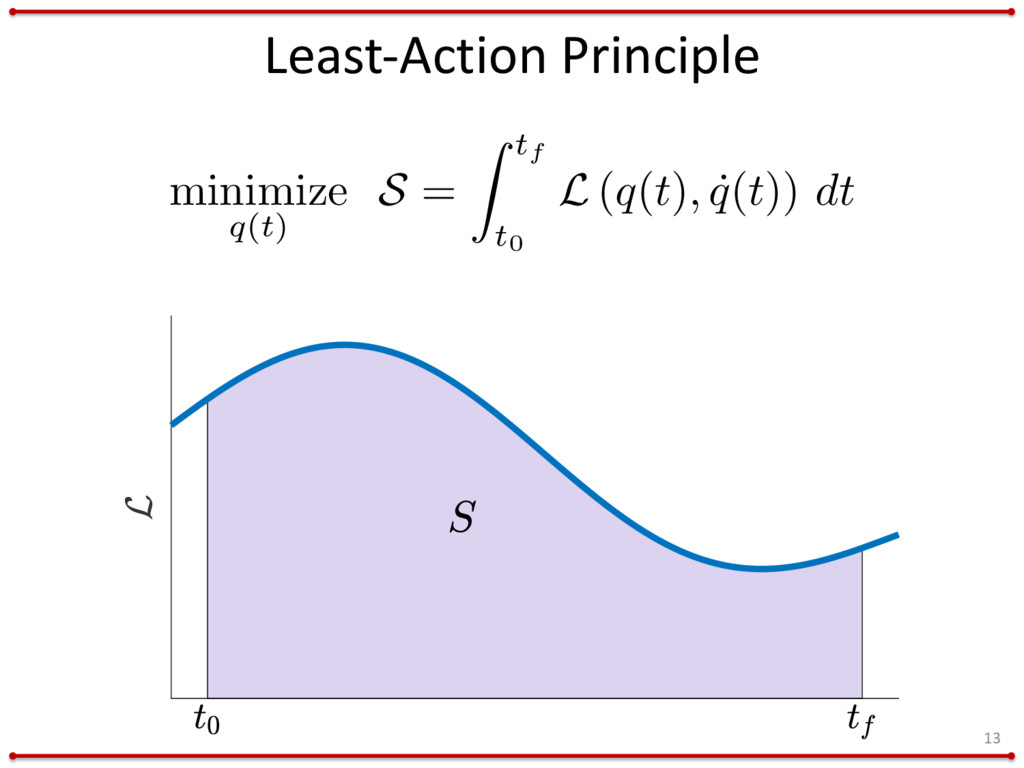
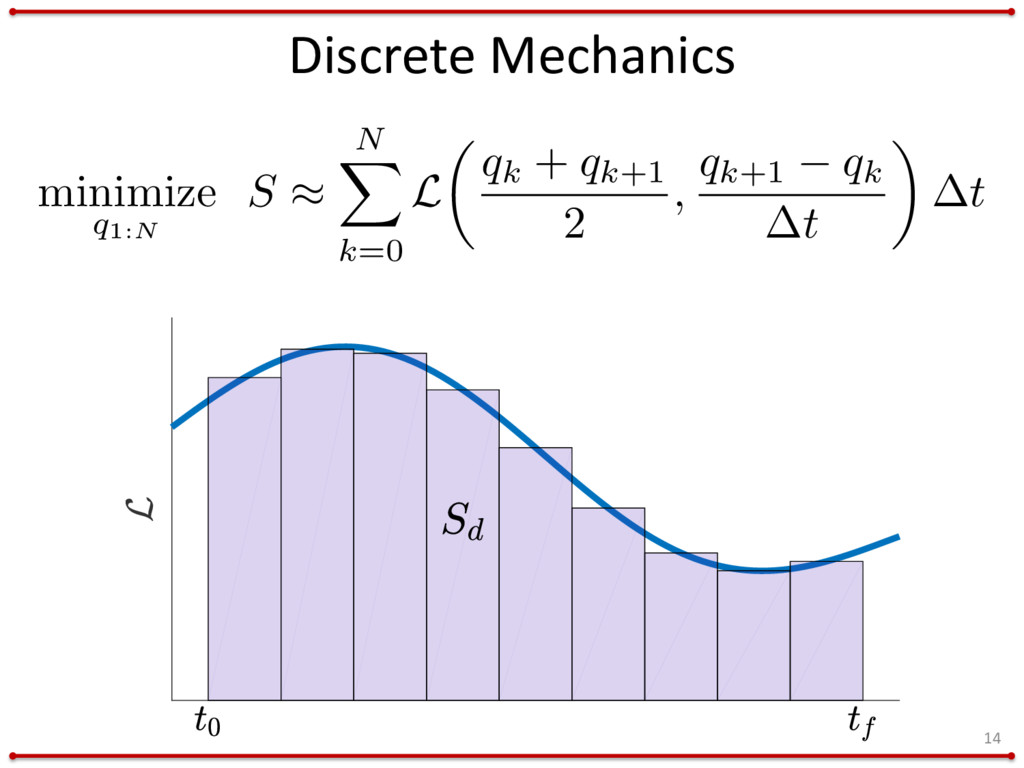
Least Action Principle results in high-order methods for simulating rigid body dynamics with contact. • We can use these ideas to build trajectory optimization algorithms for motion planning with contact. • The new algorithms achieve better accuracy with smaller problem sizes than state-of-the-art first-order methods. [email protected] http://agile.seas.harvard.edu
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}