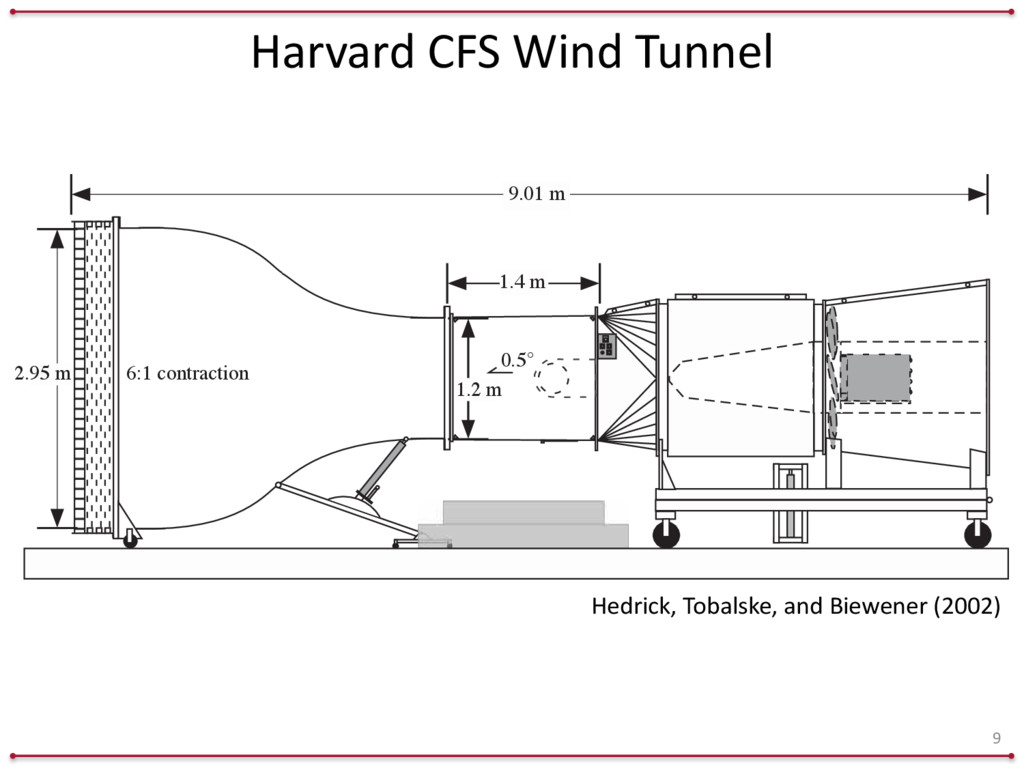
gait change tion or deceleration. The three-dimensional kinematic also includes the information available in two- onal kinematic studies, and three-dimensional changes local licensed animal vendor and housed in the Conco Station animal care facilities, where they were provid food and water ad libitum. The birds were trained to he Harvard-Concord Field Station (CFS) wind tunnel, designed for use in studies of animal flight. 6:1 contraction 0.5° 9.01 m 1.4 m 1.2 m 2.95 m Hedrick, Tobalske, and Biewener (2002)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![22 agile.seas.harvard.edu [email protected] Conclusions • Pitch can be trimmed by](https://files.speakerdeck.com/presentations/f45b6a325ad641d5b92e5dd035ce802f/slide_22.jpg){kind=link}