Share
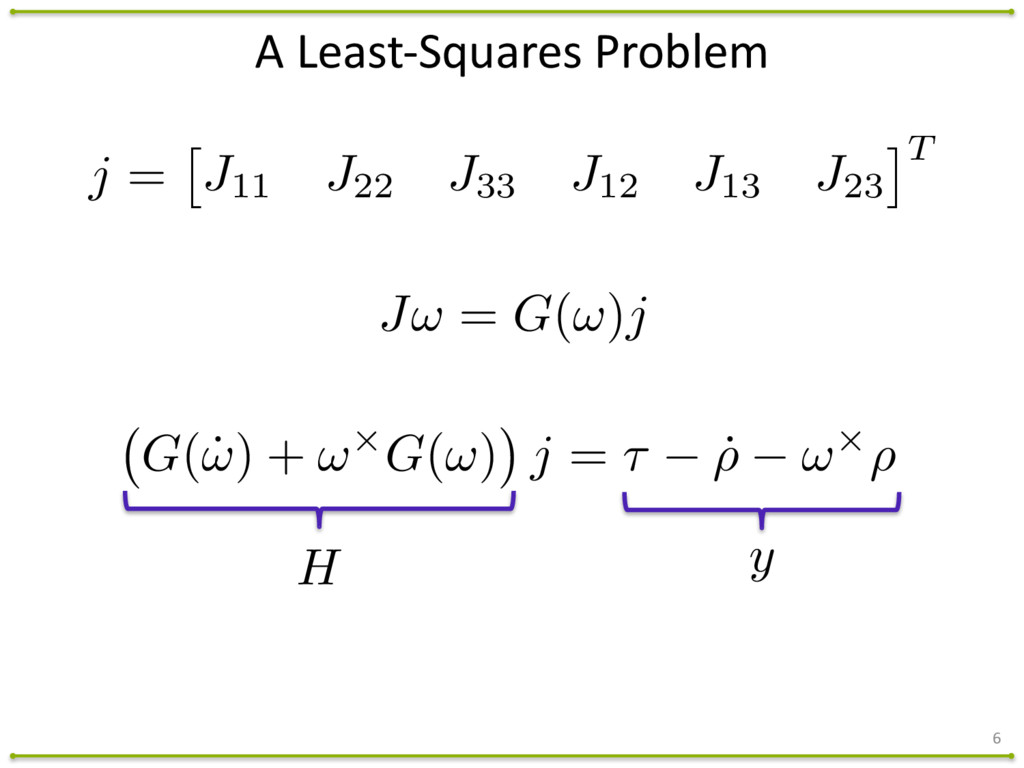
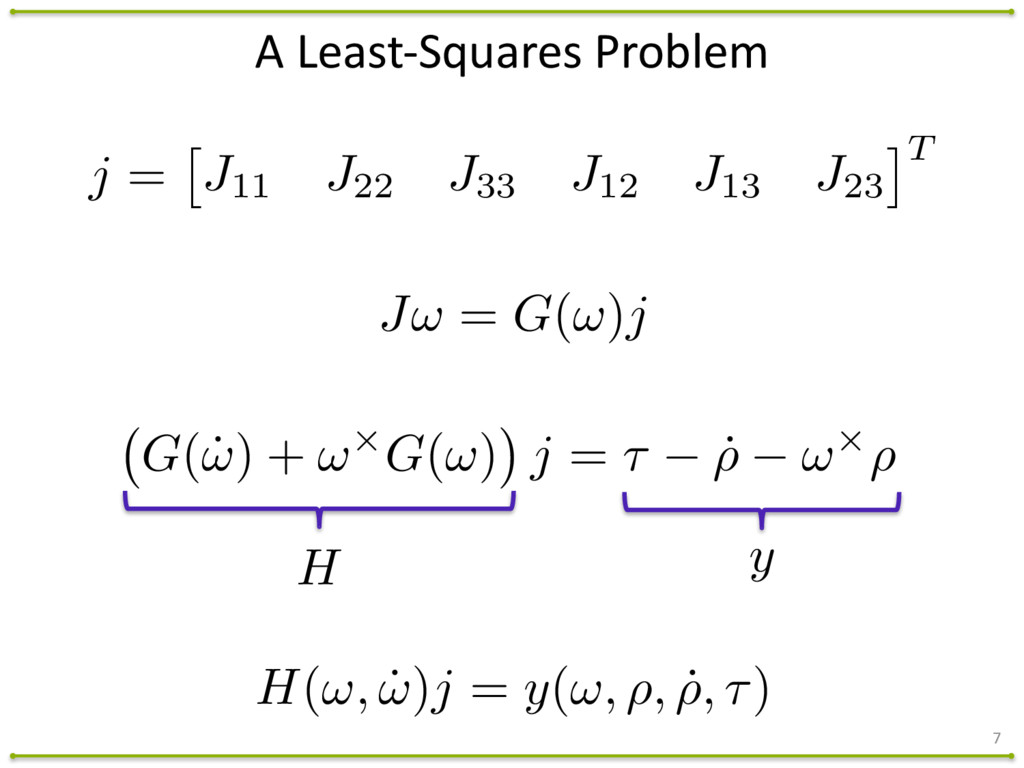
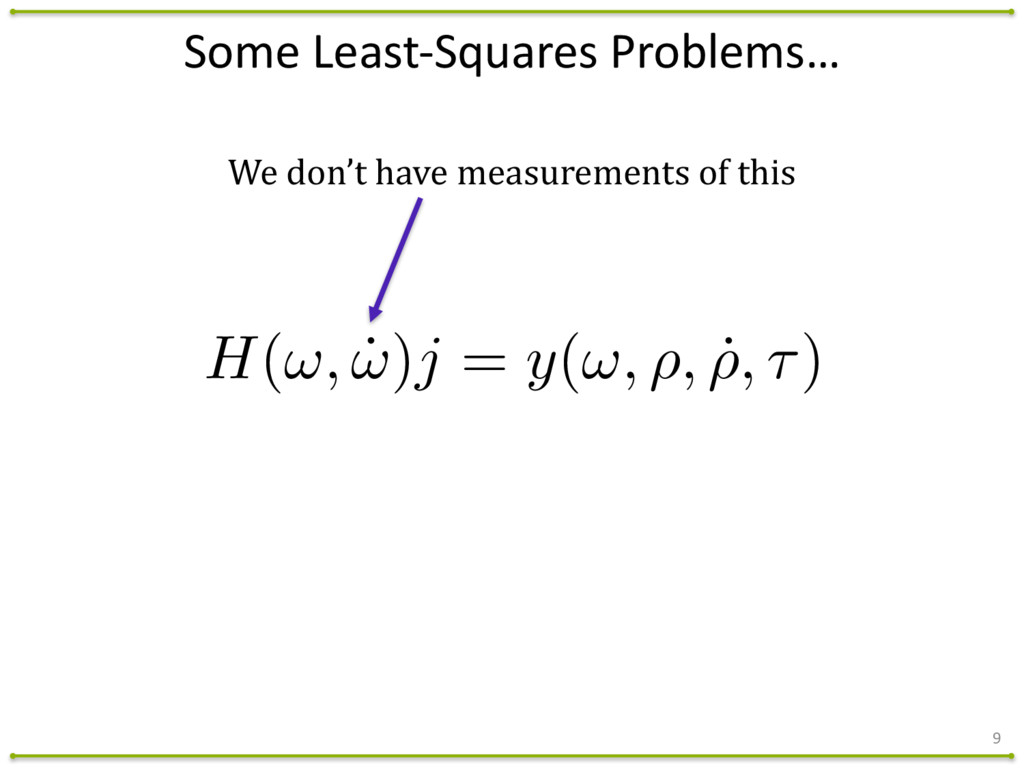
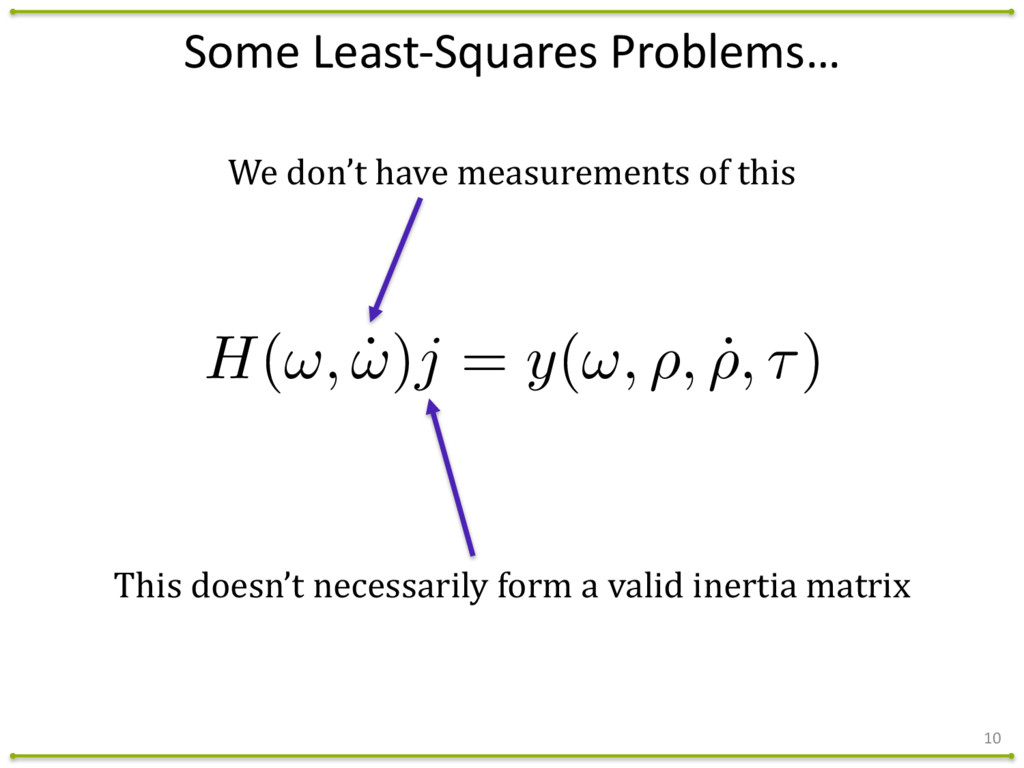
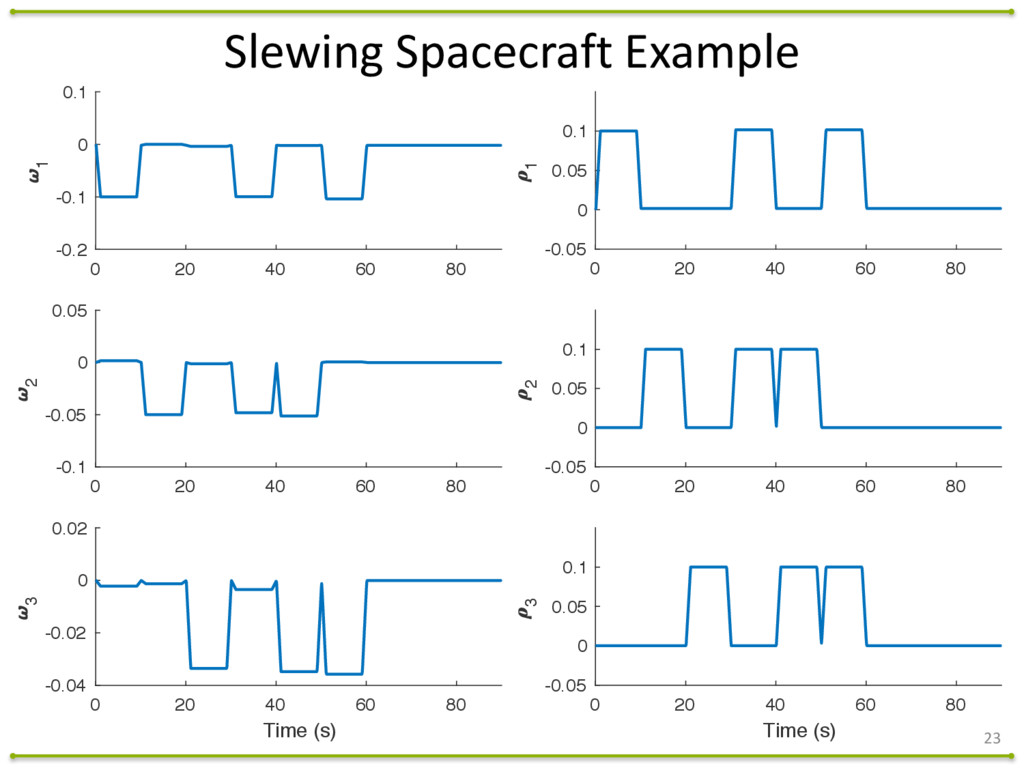
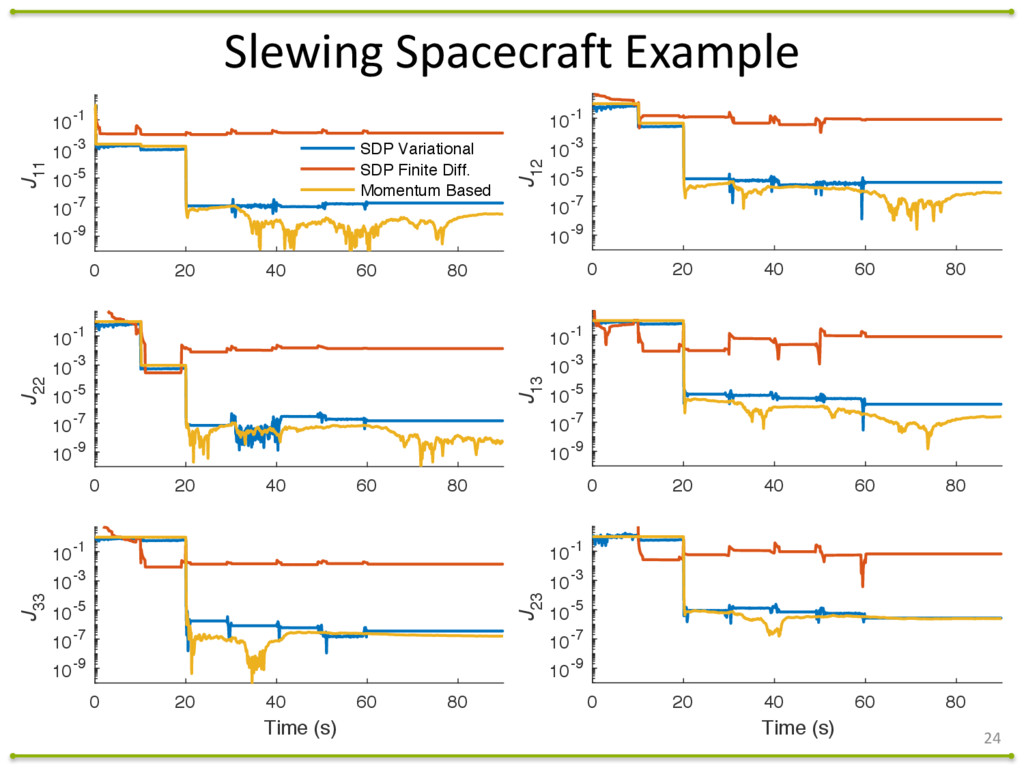
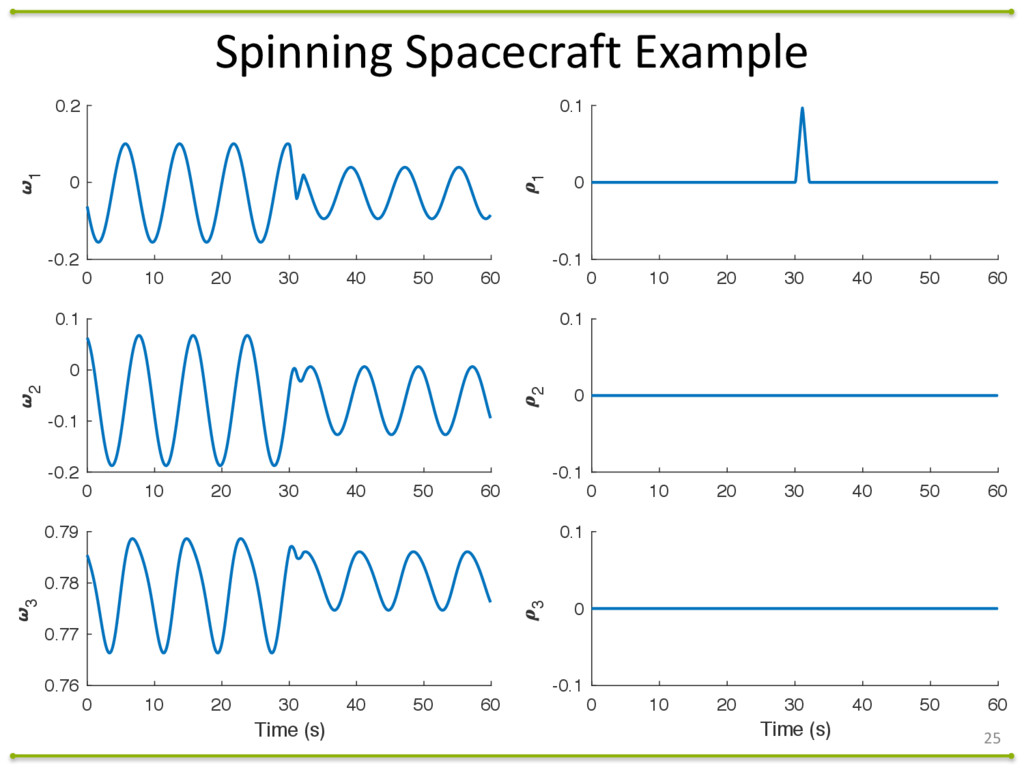
A new algorithm for estimating a spacecraft's inertia matrix on orbit. Presented at AIAA SciTech 2017. Check out the paper here: http://zacinaction.github.io/docs/Inertia_Estimation.pdf
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Questions? 28 [email protected]](https://files.speakerdeck.com/presentations/acc24b69381a475b91797606370fc149/slide_28.jpg){kind=link}