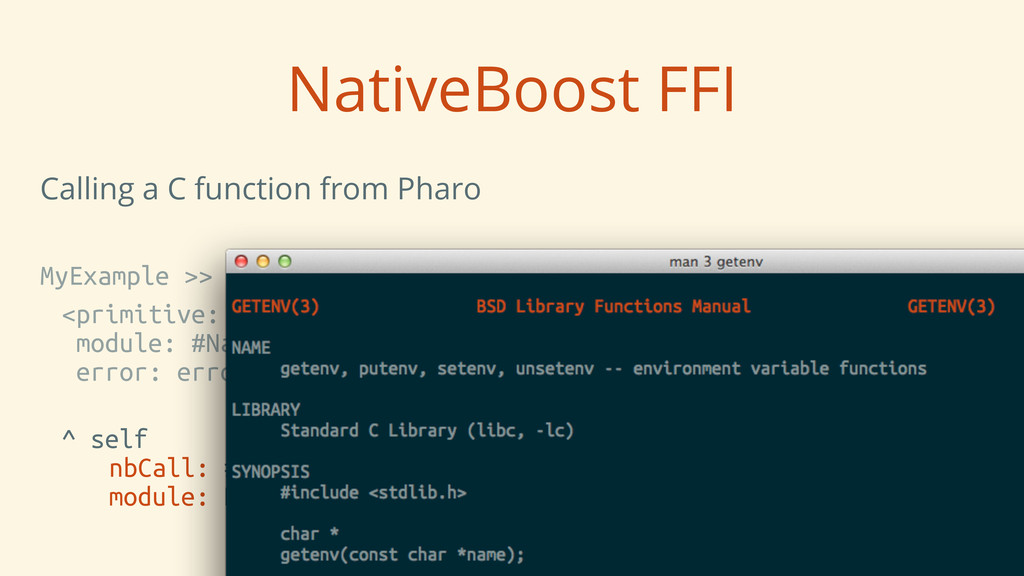
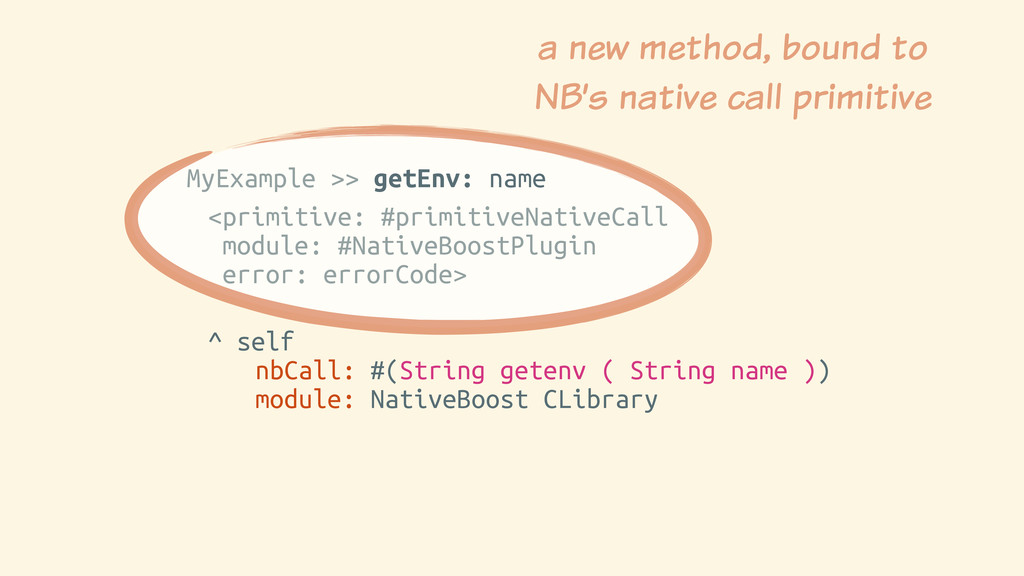
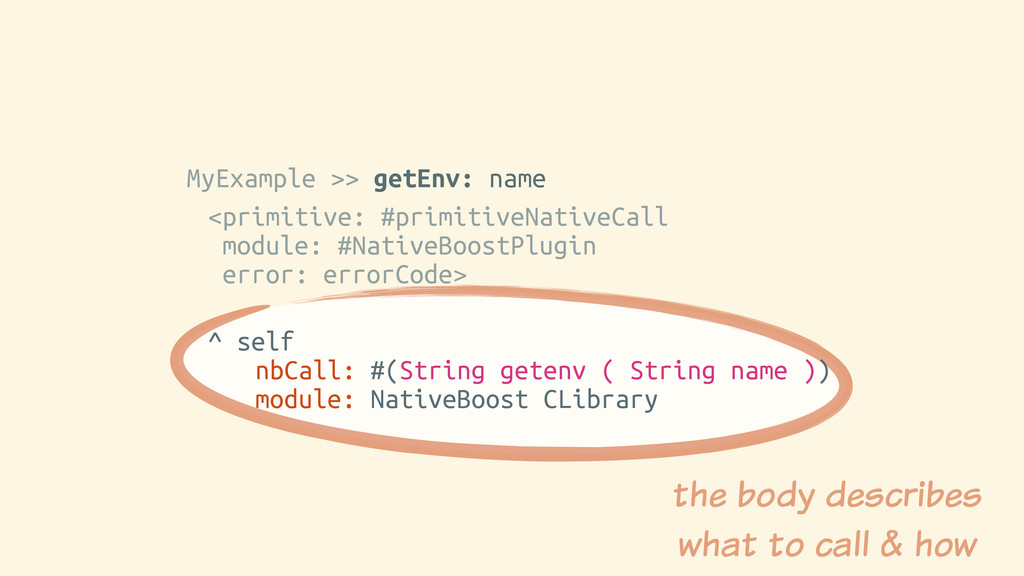
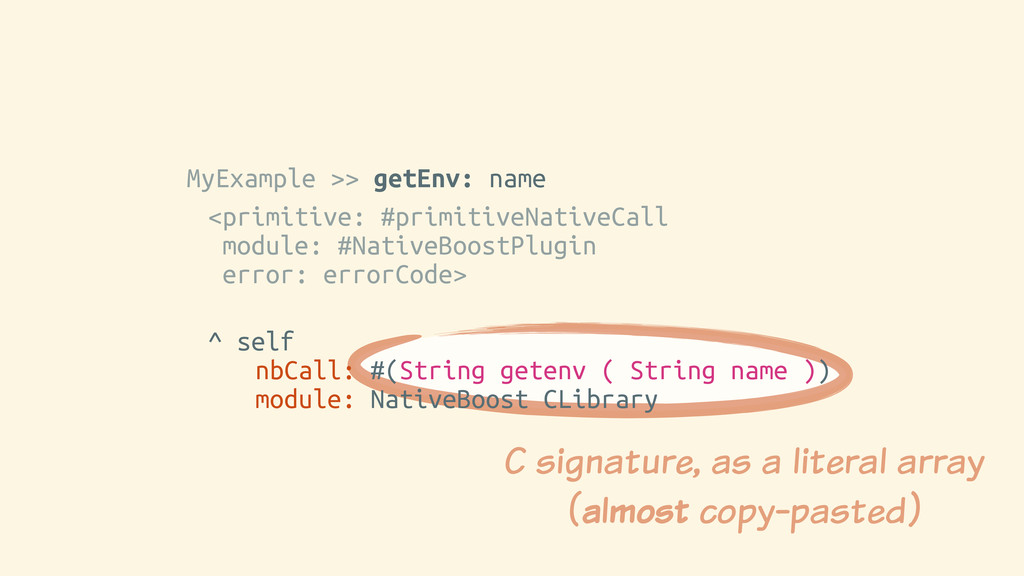
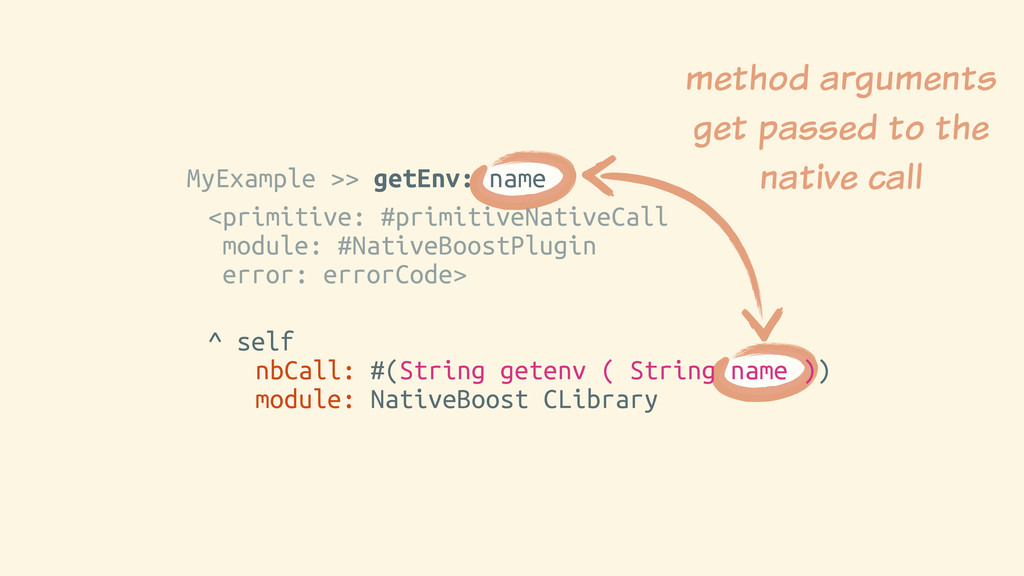
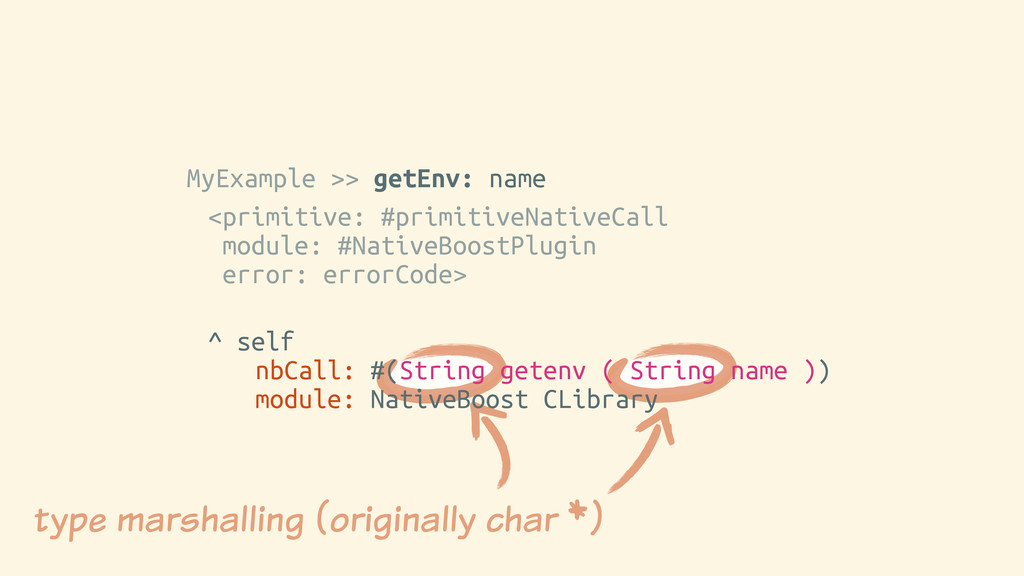
NativeBoost provides native code generation and invocation from Smalltalk. This tutorial focused its FFI feature.
Tutorial at the ESUG conference in Annecy, September 2013
http://www.esug.org/wiki/pier/Conferences/2013
https://www.youtube.com/watch?v=3UDwWysuOnE
Balloon photo CC-BY-NC Terry Feuerborn http://www.flickr.com/photos/travfotos/5431916497
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}