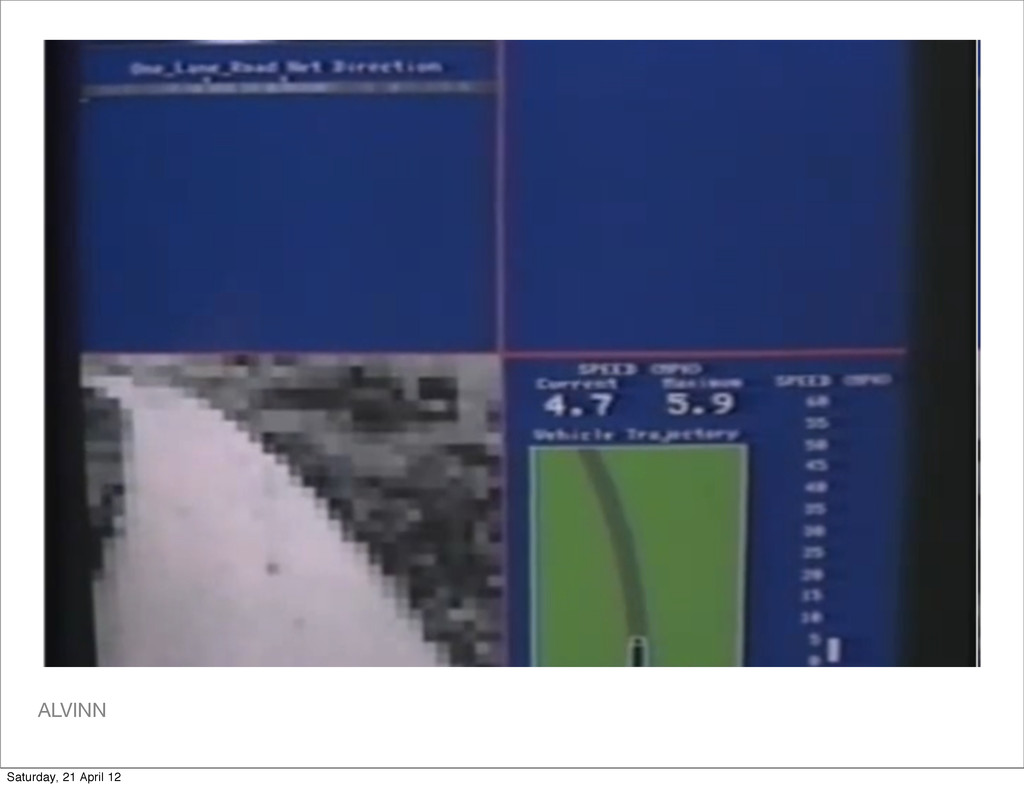
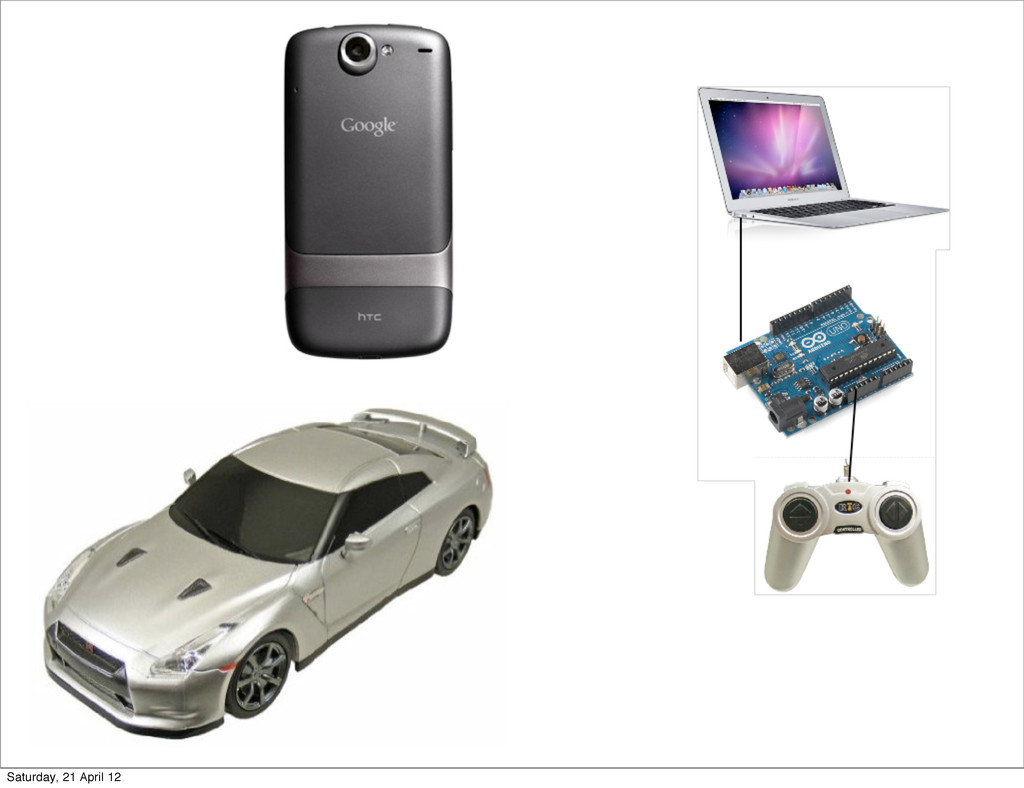
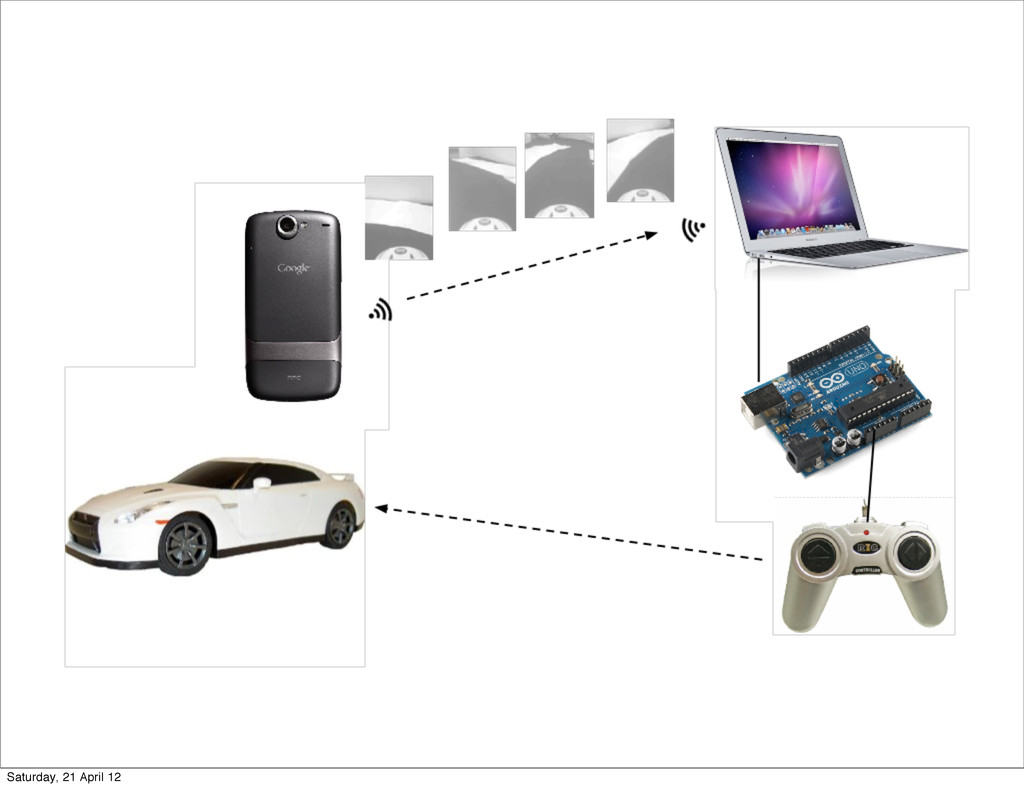
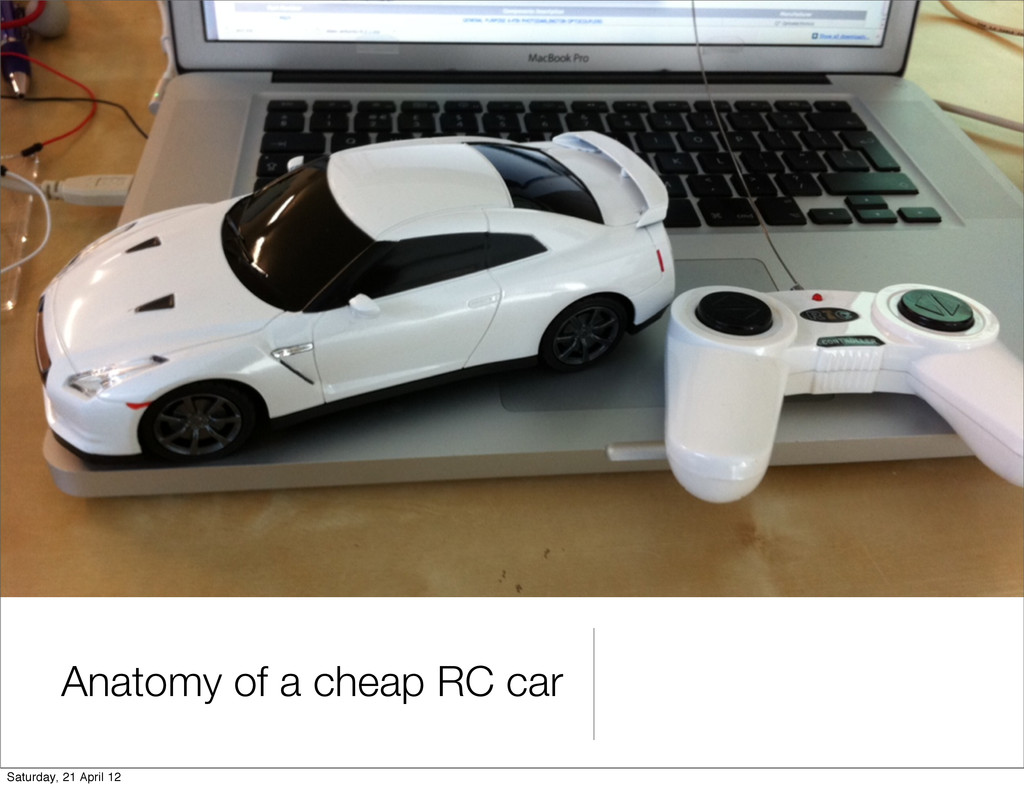
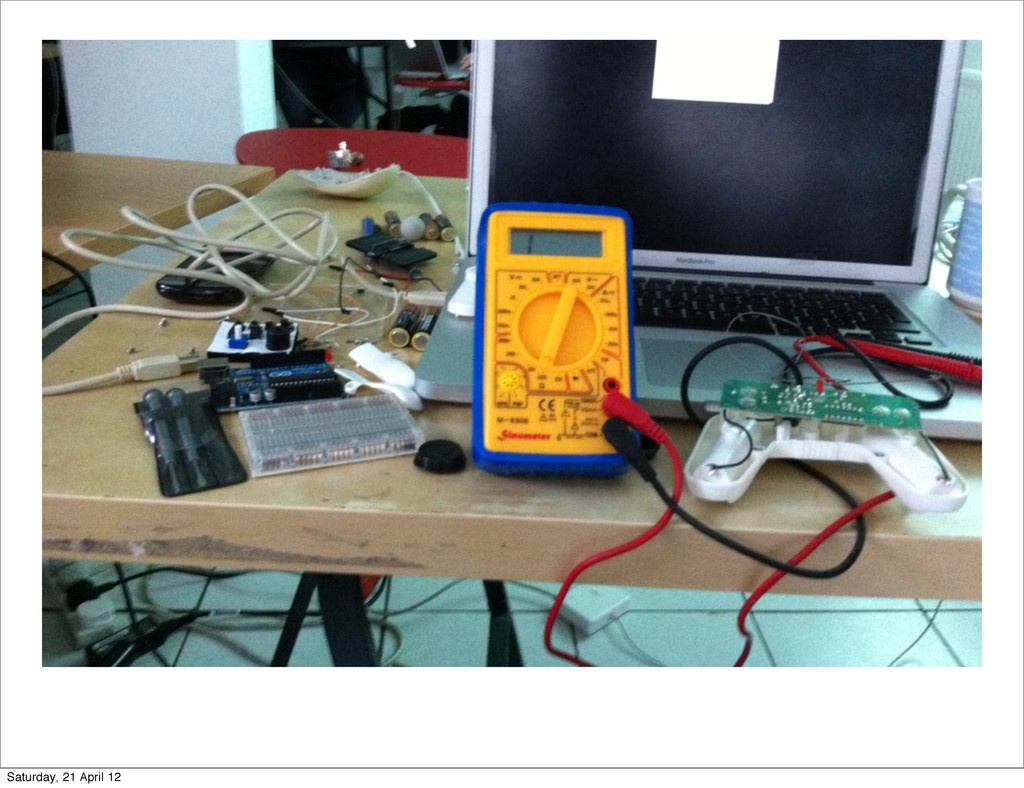
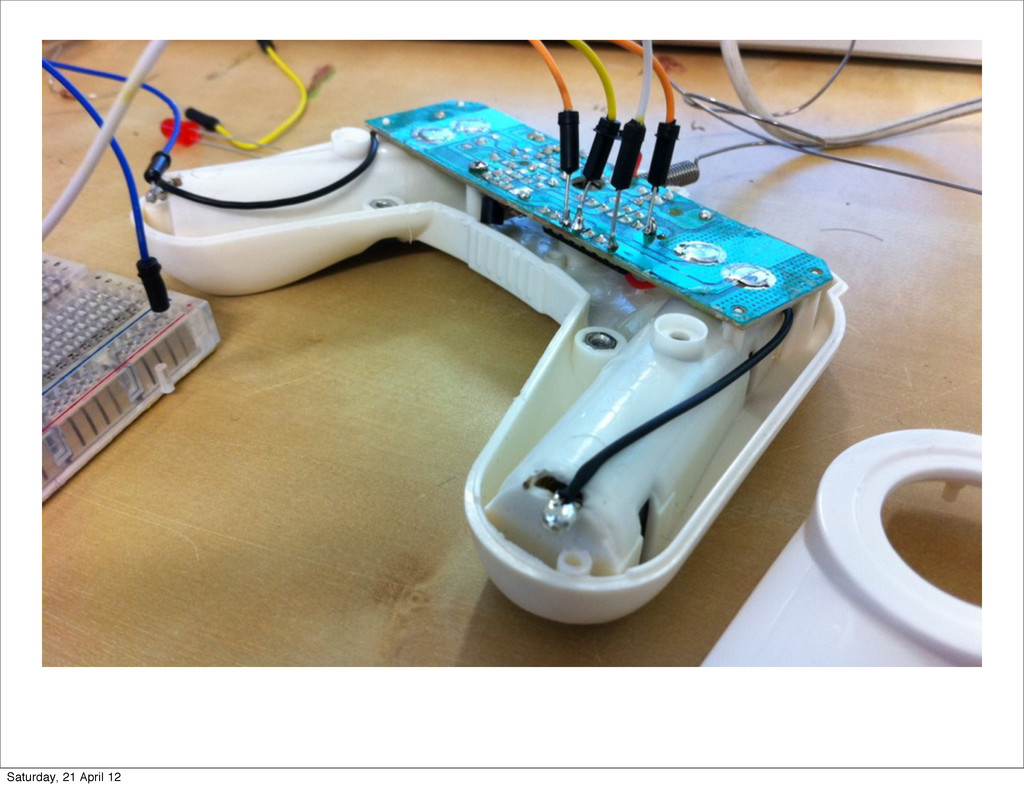
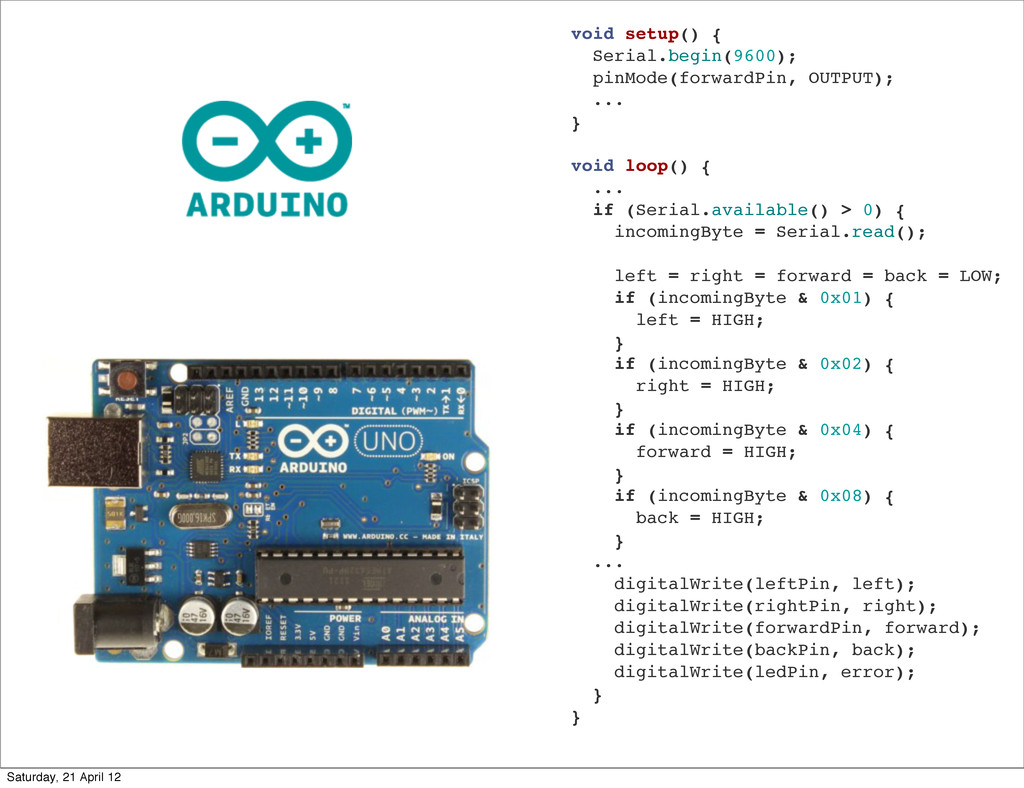
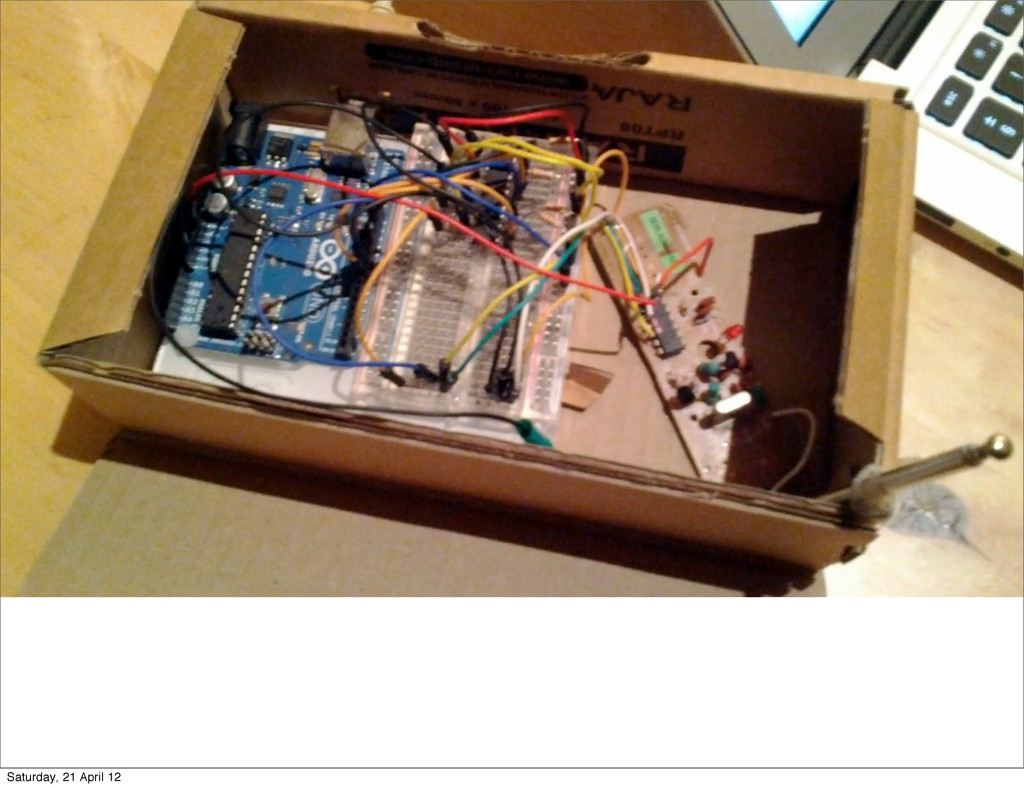
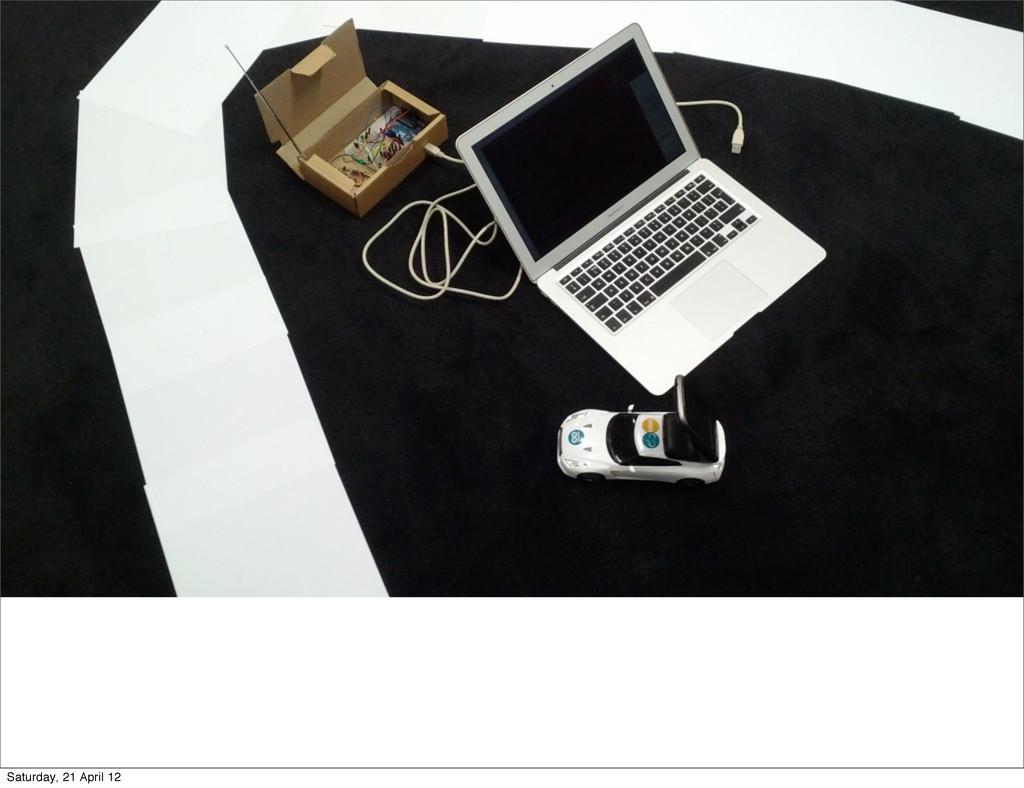
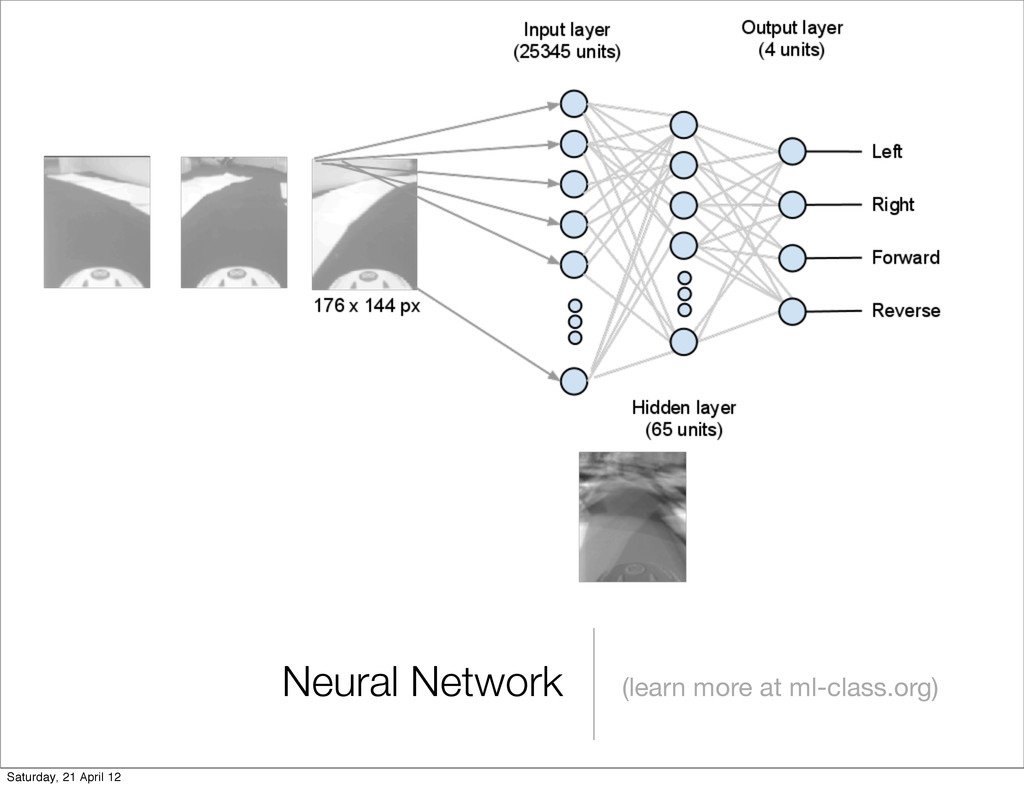
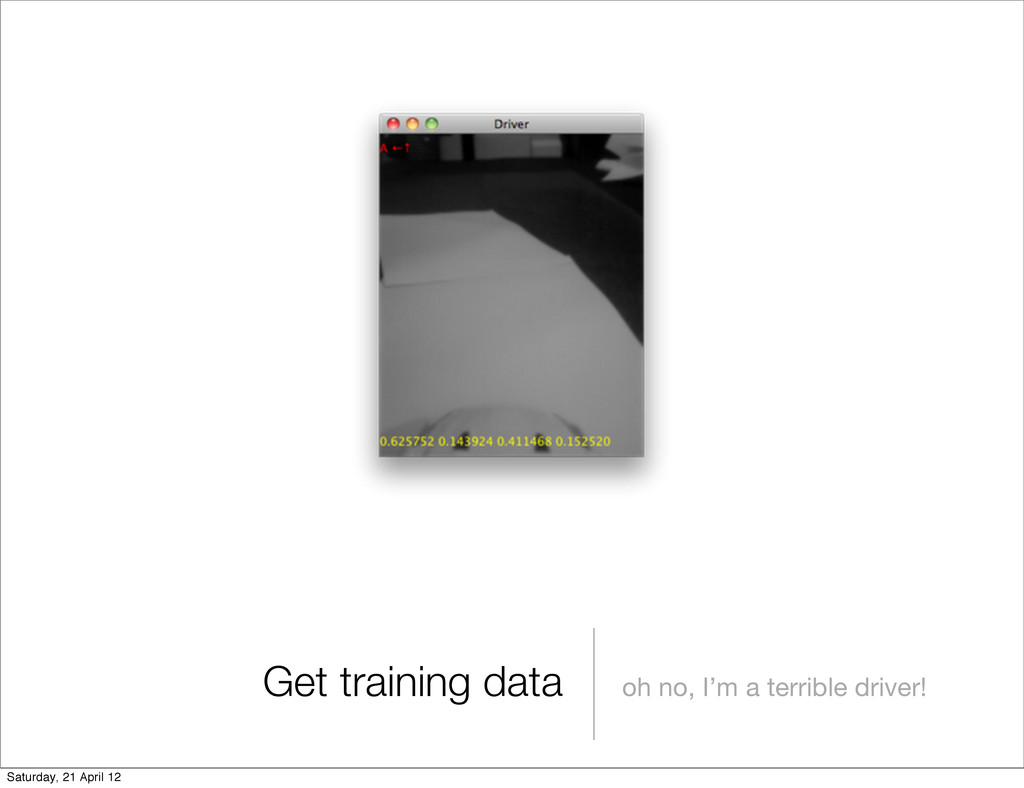
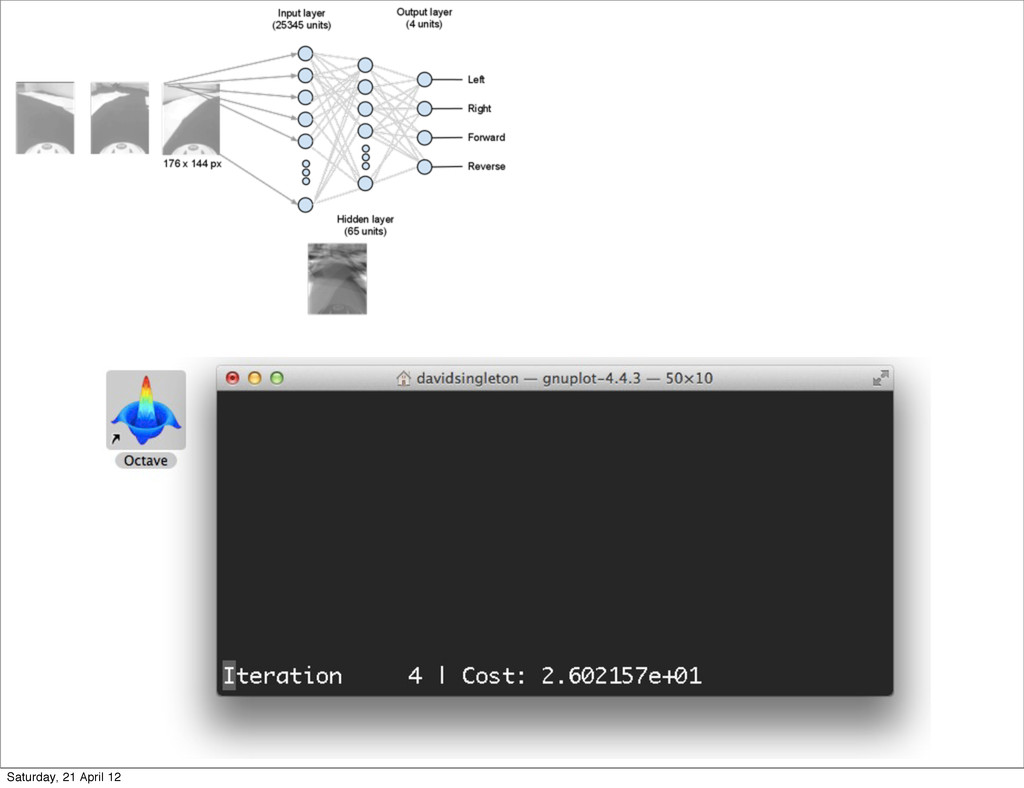
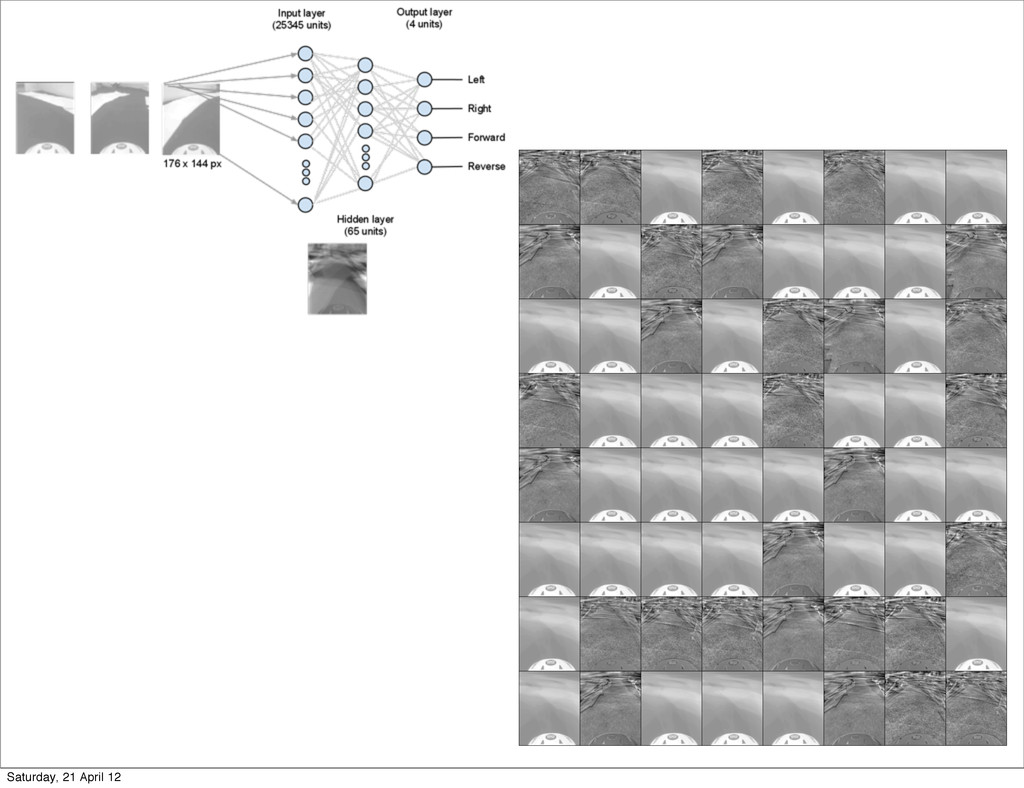
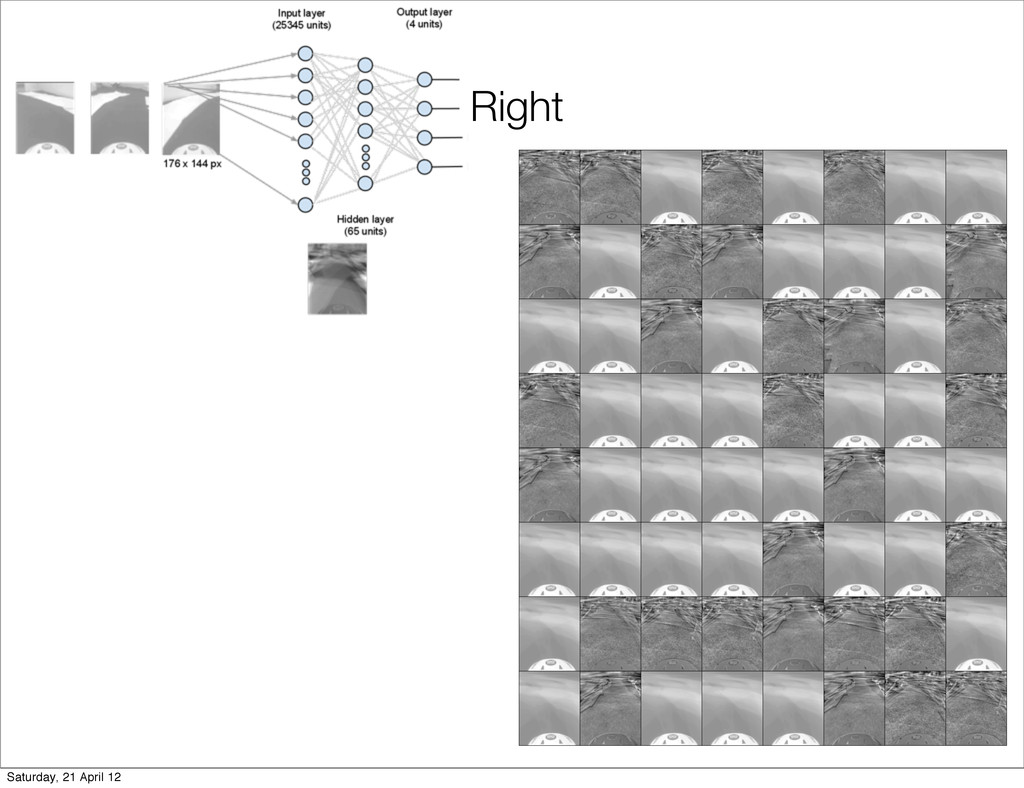
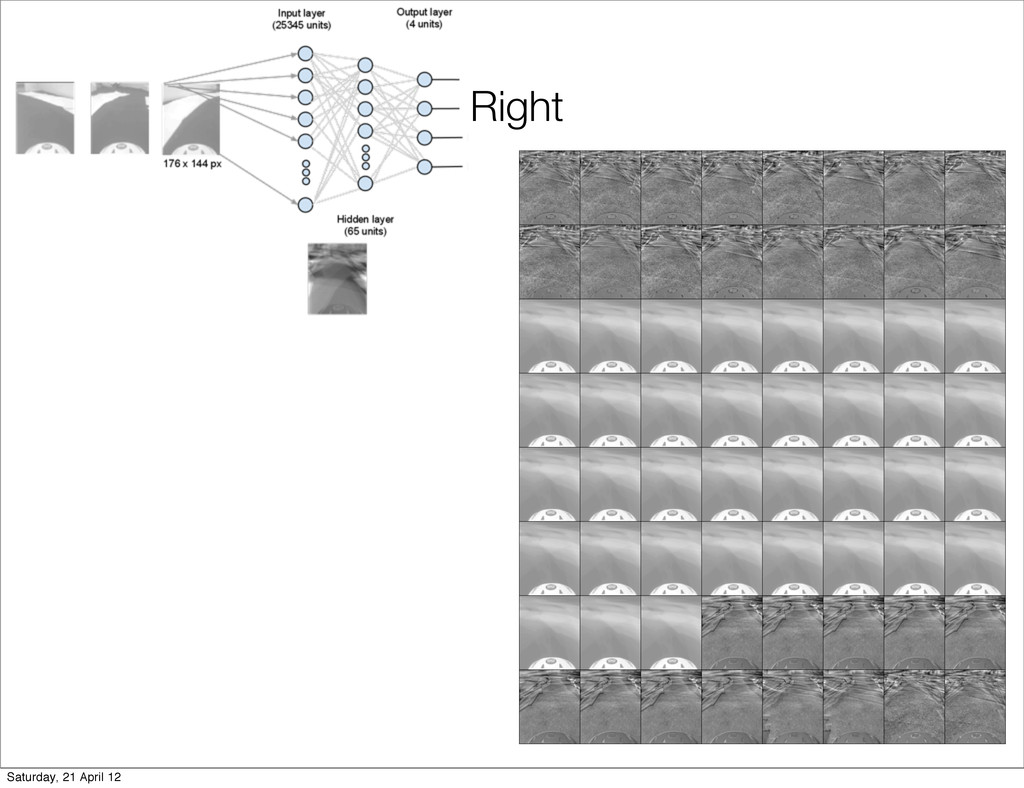
Cheap, mass produced mobile phone hardware laden with sensors combined with the compute power of the machines we use every day make expensive research systems of the 90s implementable in your living room. I'll explain how I did just that. Combining machine learning techniques anyone can learn online, an open source hardware platform, a simple mobile app and a bit of heath-robinson device hacking to build a remote control car that learns how to navigate autonomously.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}