Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Particle Filter Localization for Autonomous AUVs
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Ed Kelley
April 30, 2013
Research
0
41
Particle Filter Localization for Autonomous AUVs
Senior Thesis Presentation 2013
Ed Kelley
April 30, 2013
Tweet
Share
Other Decks in Research
See All in Research
POI: Proof of Identity
katsyoshi
0
140
第66回コンピュータビジョン勉強会@関東 Epona: Autoregressive Diffusion World Model for Autonomous Driving
kentosasaki
0
350
Can AI Generated Ambrotype Chain the Aura of Alternative Process? In SIGGRAPH Asia 2024 Art Papers
toremolo72
0
140
データサイエンティストの業務変化
datascientistsociety
PRO
0
220
Thirty Years of Progress in Speech Synthesis: A Personal Perspective on the Past, Present, and Future
ktokuda
0
170
2025-11-21-DA-10th-satellite
yegusa
0
110
2026-01-30-MandSL-textbook-jp-cos-lod
yegusa
0
210
SREはサイバネティクスの夢をみるか? / Do SREs Dream of Cybernetics?
yuukit
3
380
離散凸解析に基づく予測付き離散最適化手法 (IBIS '25)
taihei_oki
PRO
1
690
教師あり学習と強化学習で作る 最強の数学特化LLM
analokmaus
2
890
"主観で終わらせない"定性データ活用 ― プロダクトディスカバリーを加速させるインサイトマネジメント / Utilizing qualitative data that "doesn't end with subjectivity" - Insight management that accelerates product discovery
kaminashi
15
20k
自動運転におけるデータ駆動型AIに対する安全性の考え方 / Safety Engineering for Data-Driven AI in Autonomous Driving Systems
ishikawafyu
0
130
Featured
See All Featured
Visual Storytelling: How to be a Superhuman Communicator
reverentgeek
2
430
Deep Space Network (abreviated)
tonyrice
0
49
Dealing with People You Can't Stand - Big Design 2015
cassininazir
367
27k
SEOcharity - Dark patterns in SEO and UX: How to avoid them and build a more ethical web
sarafernandez
0
120
[SF Ruby Conf 2025] Rails X
palkan
1
760
XXLCSS - How to scale CSS and keep your sanity
sugarenia
249
1.3M
Conquering PDFs: document understanding beyond plain text
inesmontani
PRO
4
2.3k
Believing is Seeing
oripsolob
1
56
State of Search Keynote: SEO is Dead Long Live SEO
ryanjones
0
120
Chrome DevTools: State of the Union 2024 - Debugging React & Beyond
addyosmani
10
1.1k
No one is an island. Learnings from fostering a developers community.
thoeni
21
3.6k
Leadership Guide Workshop - DevTernity 2021
reverentgeek
1
200
Transcript
Particle Filter Localization for Autonomous AUVs Using Augmented Reality Tags
Ed Kelley, 2013 Szymon Rusinkiewicz
aka
Where is the Quadcopter?
Motivation
This statue is cool http://www.asergeev.com/pictures/archives/2007/572/jpeg/05.jpg
I want a 3d model http://www.asergeev.com/pictures/archives/2007/572/jpeg/05.jpg
Video Games Virtual Reality Movies Archeology Architecture Maps Crash Scenes
Manual Modeling? Laser Scanner? Multi-View Stereo? Microsoft Kinect?
Manual Modeling? Laser Scanner? Multi-View Stereo? Microsoft Kinect?
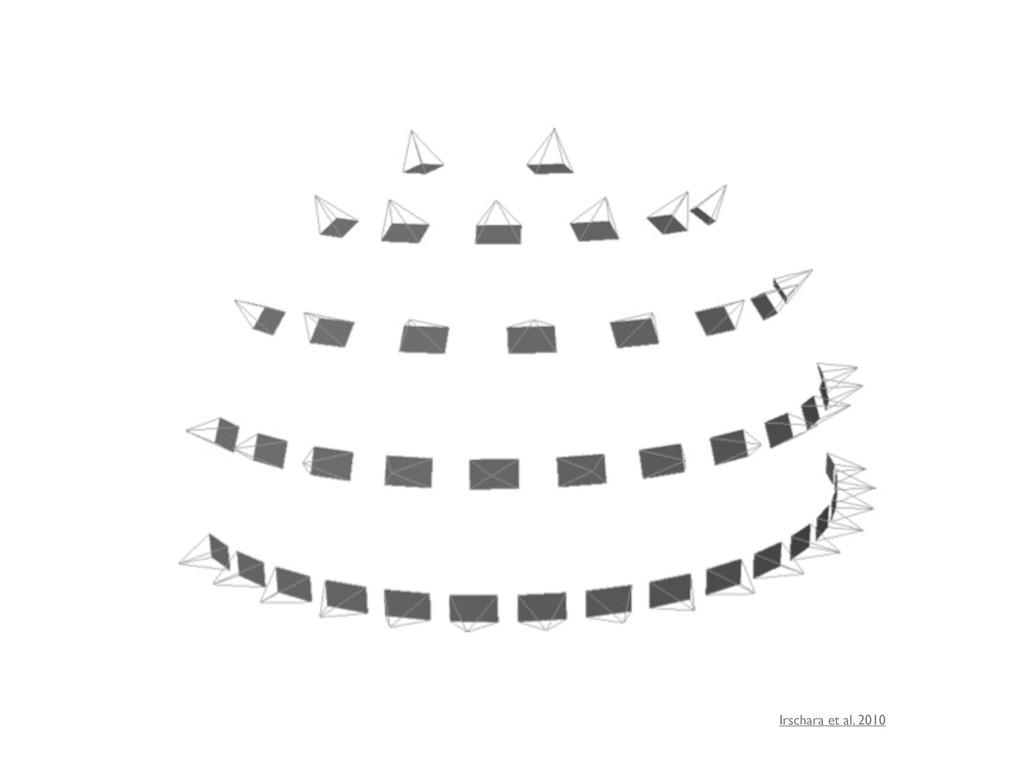
Irschara et al. 2010
Easy Cheap Complete High Quality
Quadcopters!
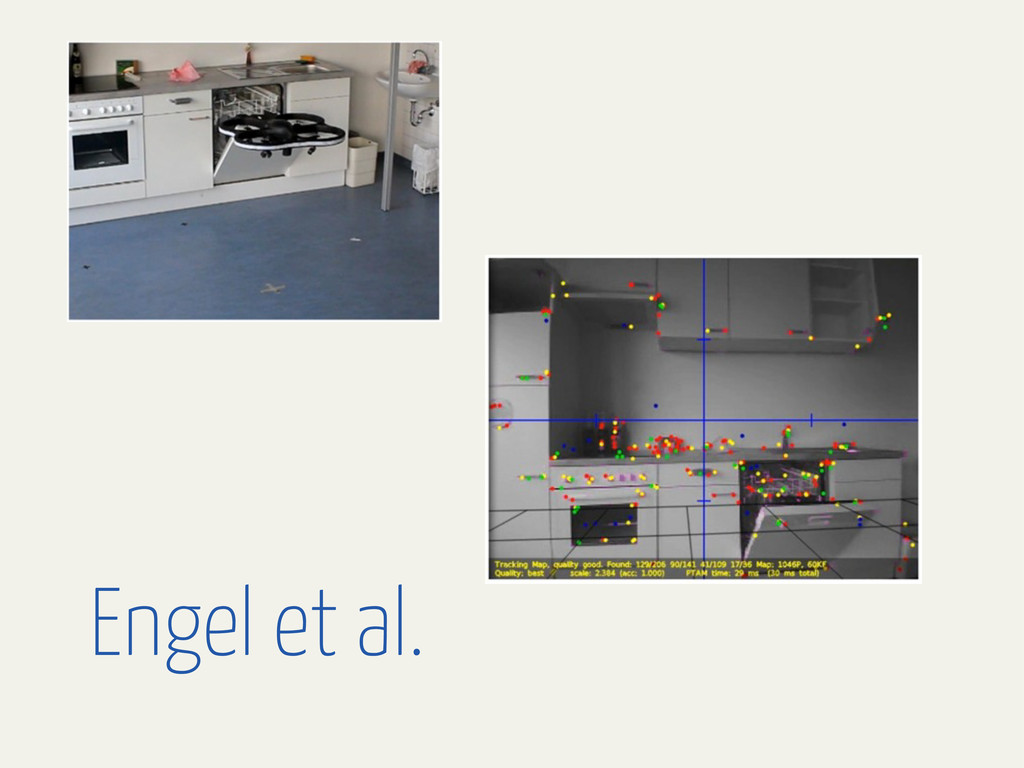
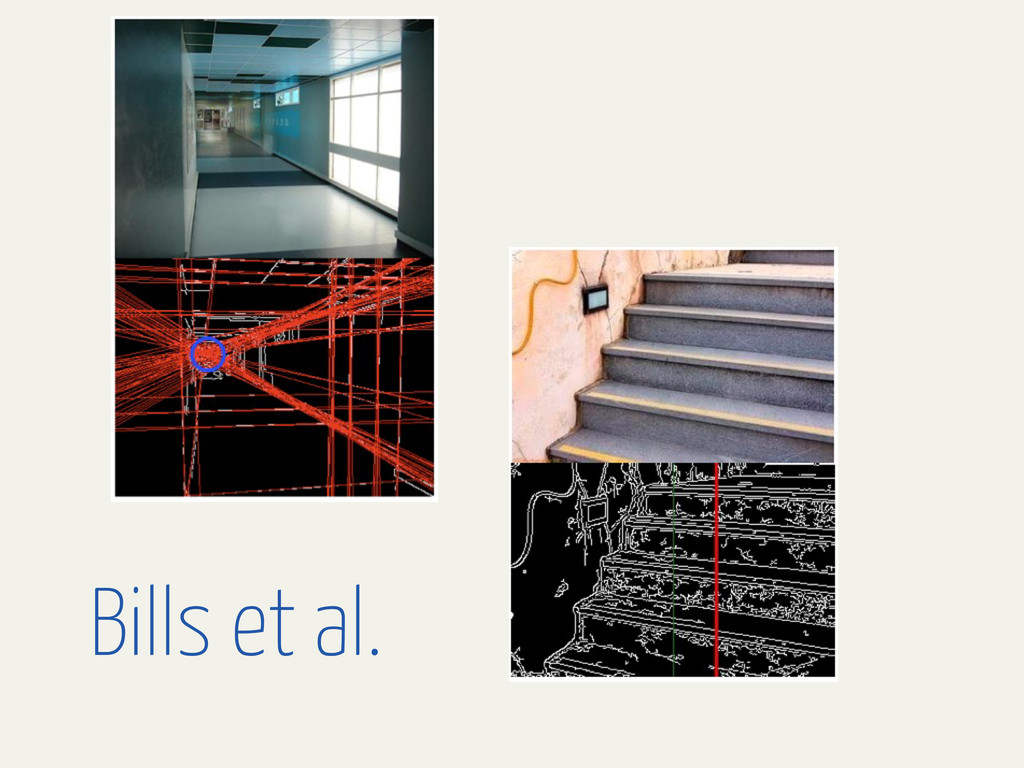
Related Work
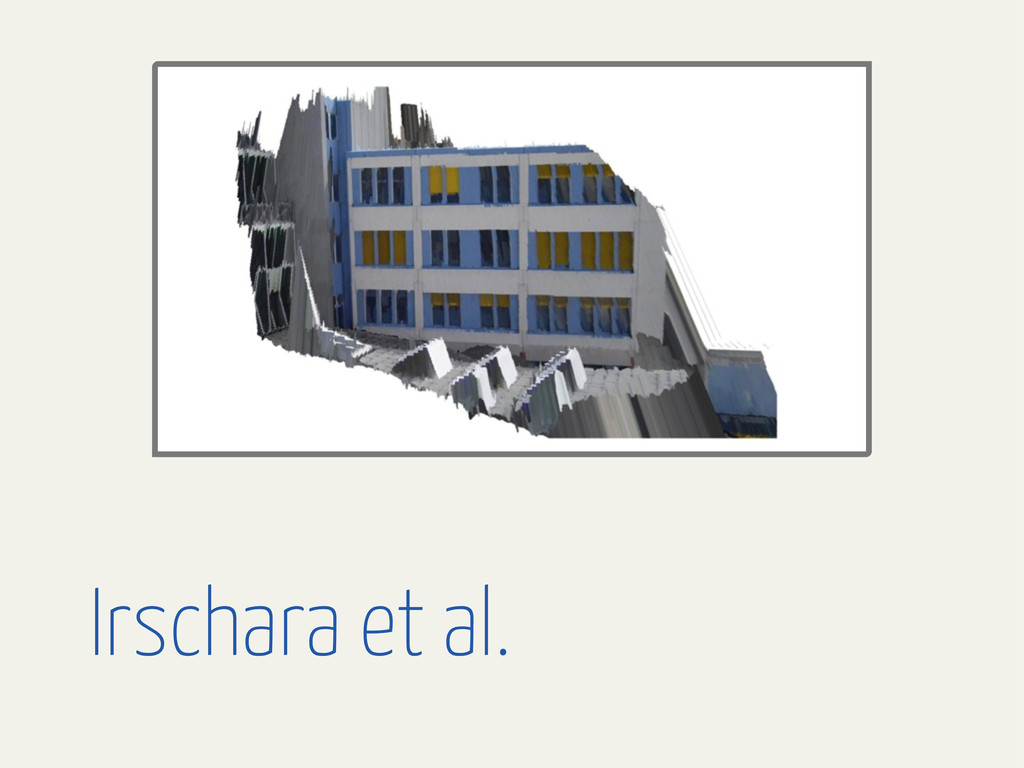
Irschara et al.
Engel et al.
Bills et al.
System Design
AR.Drone 2.0 http://ardrone2.parrot.com/photos/photo-album/
None
Localization + Controller = Autonomy
Localization
Local drift. tend to measurements
No GPS No rangefinders
None
Kalman Filter? Grid Based Markov? Particle Filter?
Kalman Filter? Grid Based Markov? Particle Filter?
. This is a particle
. It represents a possible pose
. x y z heading weight
Prediction Step Update the position of each particle using noisy
velocity and gyroscope readings.
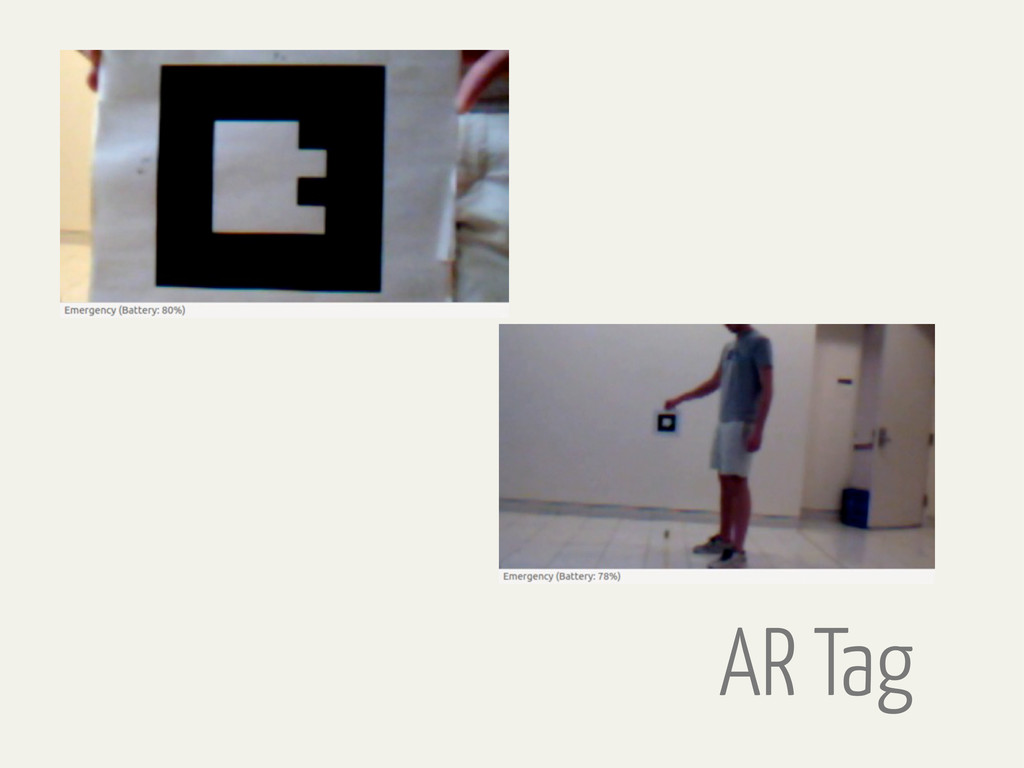
Correction Step 1. Check for an augmented reality tag. 2.
Calculate transformation from camera to tag. 3. Use known coordinates of the tag to calculate the position of the quadcopter.
Correction Step 4. Weight the particles using their similarity to
this calculated position. 5. Perform weighted resampling of the particles. 6. With some probability, replace particles with this calculated position.
Estimate Use a linear combination of the particle values to
create an estimated pose.
Testing
Gyroscope
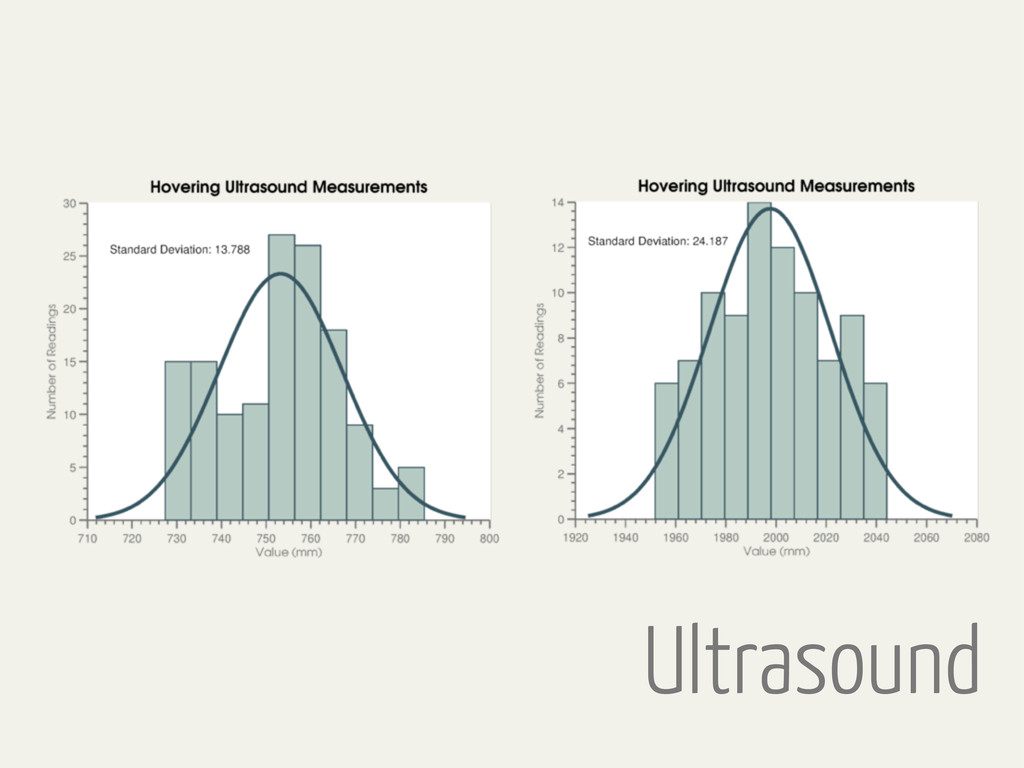
Ultrasound
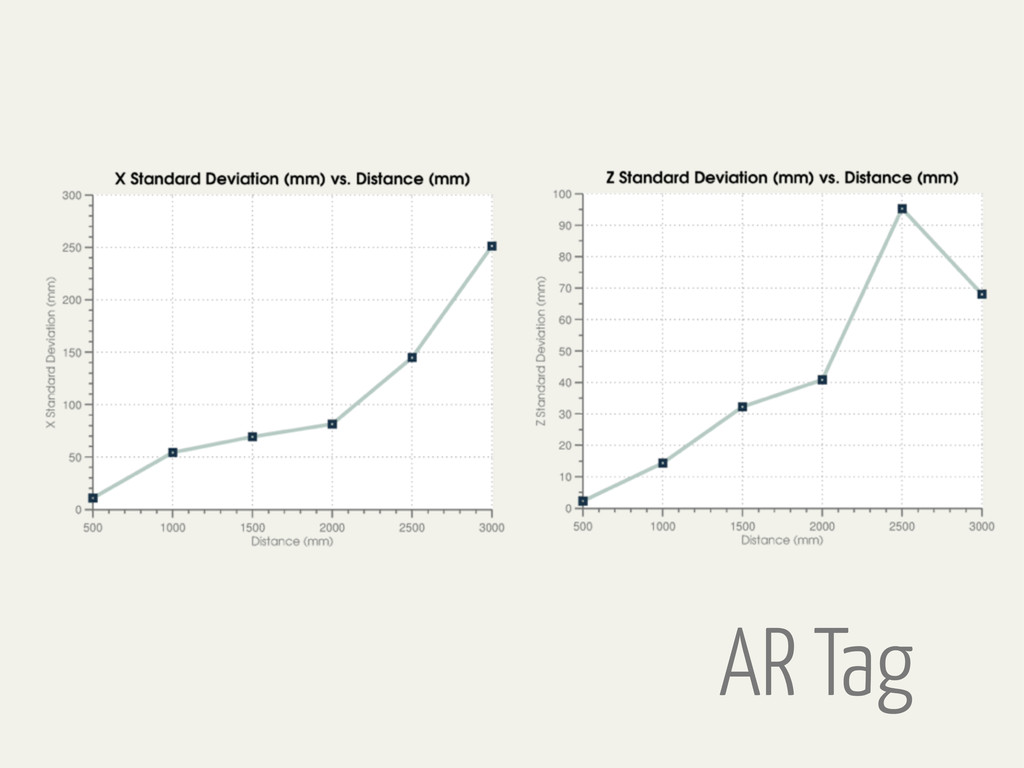
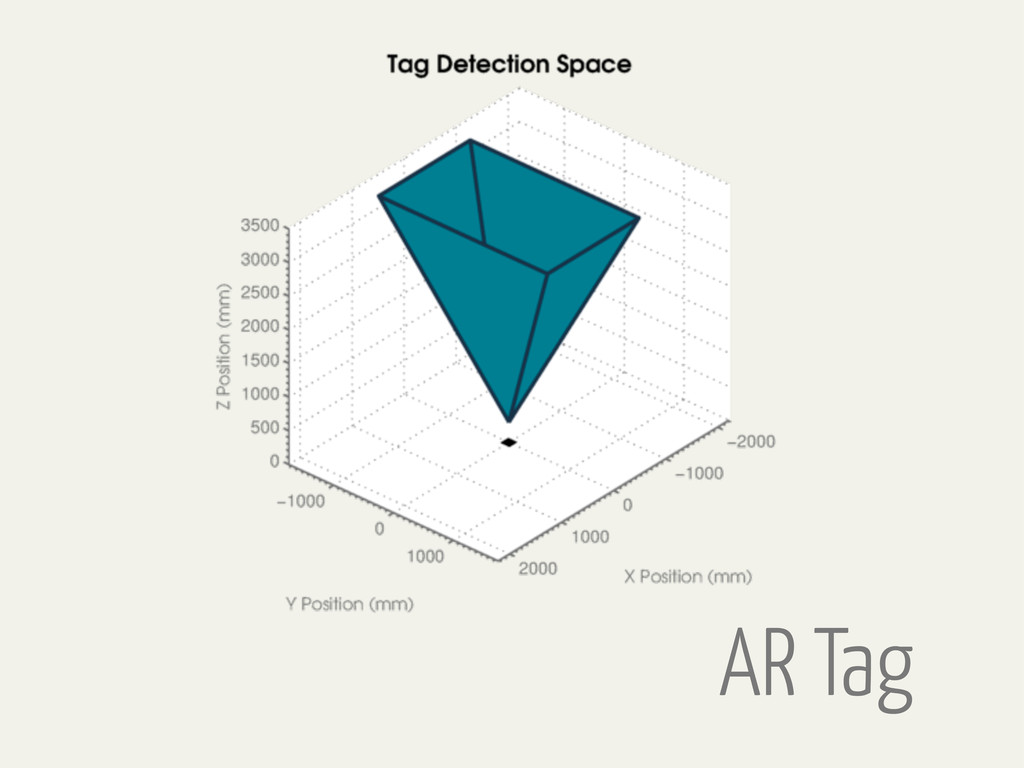
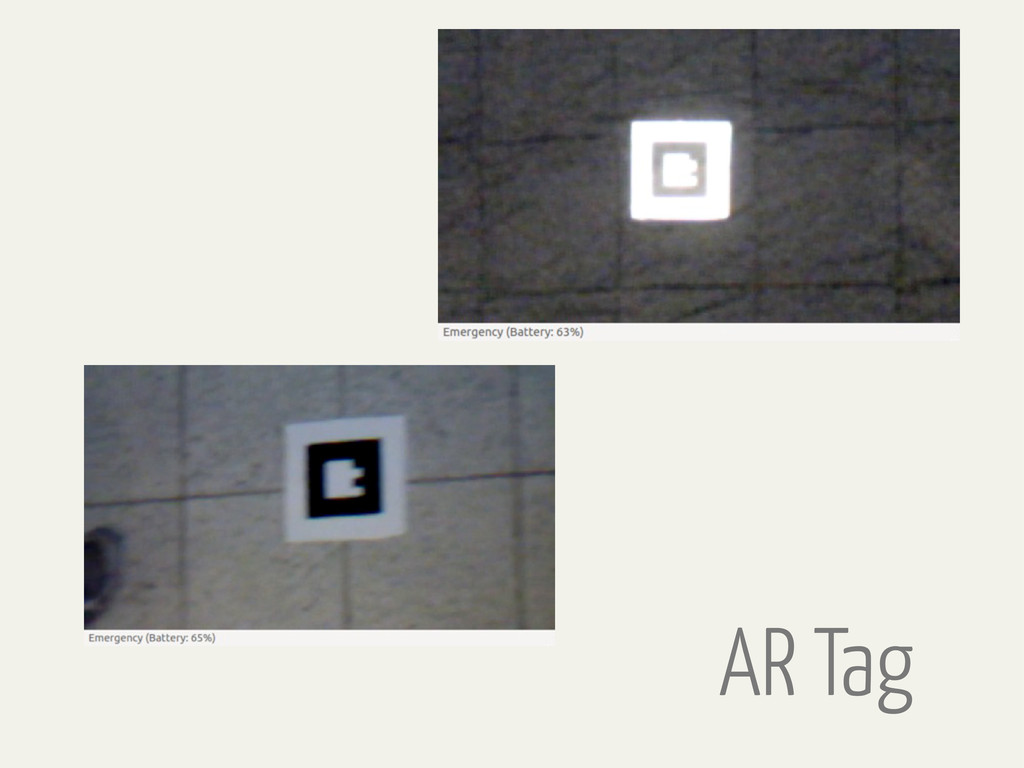
AR Tag
AR Tag
AR Tag
AR Tag
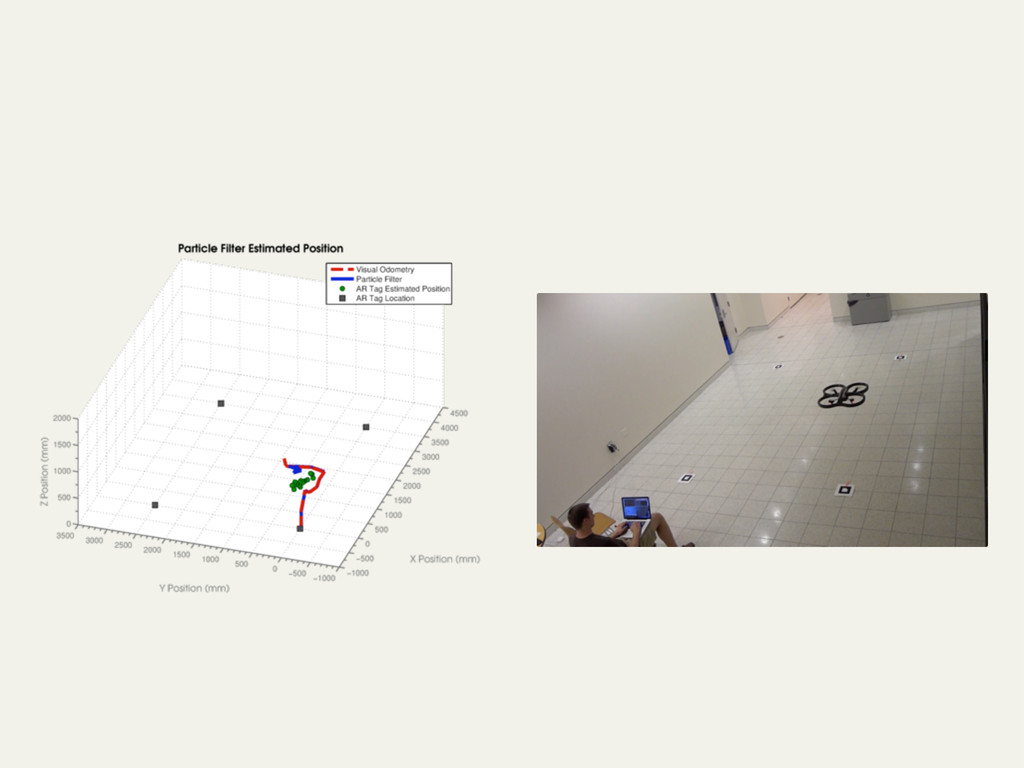
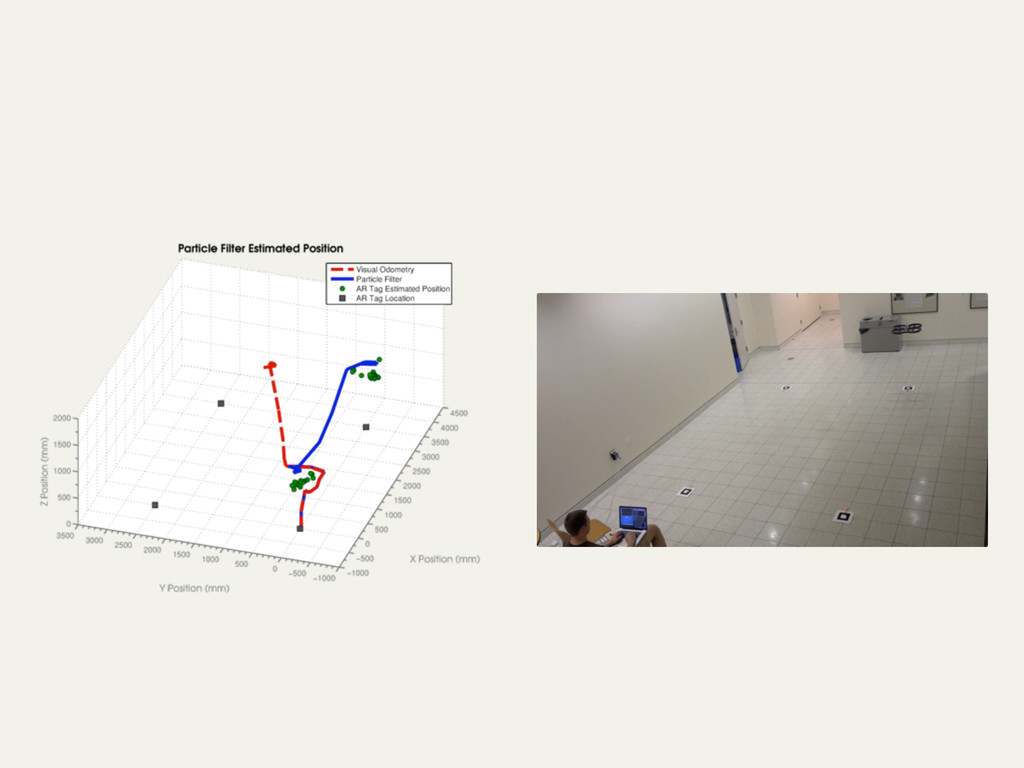
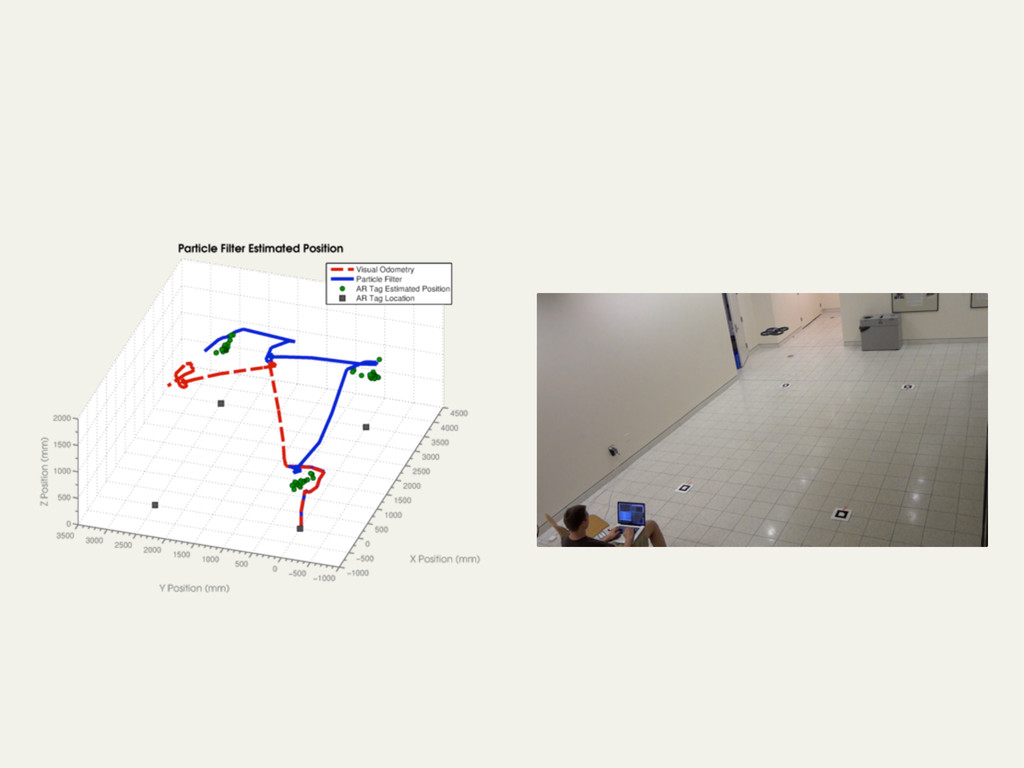
Manual Flight Test
None
None
None
None
None
Conclusion
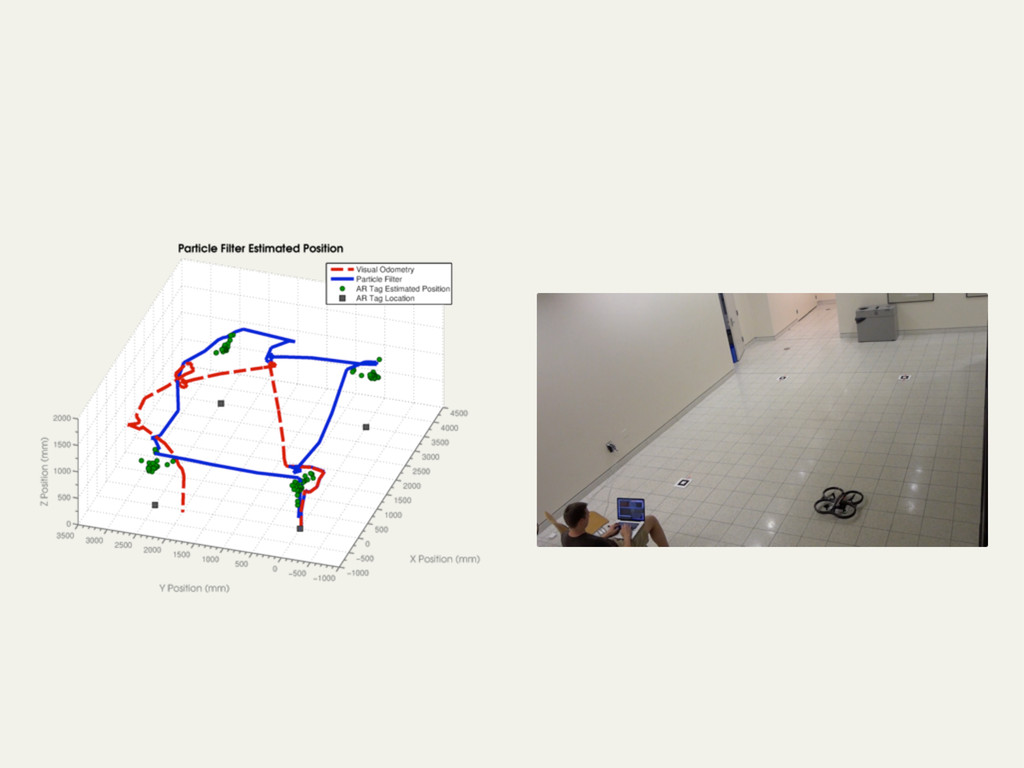
Particle filter localization using augmented reality tags performs substantially better
than integrated velocity alone.
AR Tags are highly dependent on lighting.
Its called Hardware for a reason.
Next steps... Full integration with controller. Modeling objects.
Thanks!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}