講義に入る前に 確認事項
前回の復習
制御とは?
化学工学・プロセスシステム・制御で大事なこと
制御するためには、何が必要か?
出力変数と入力変数との関係
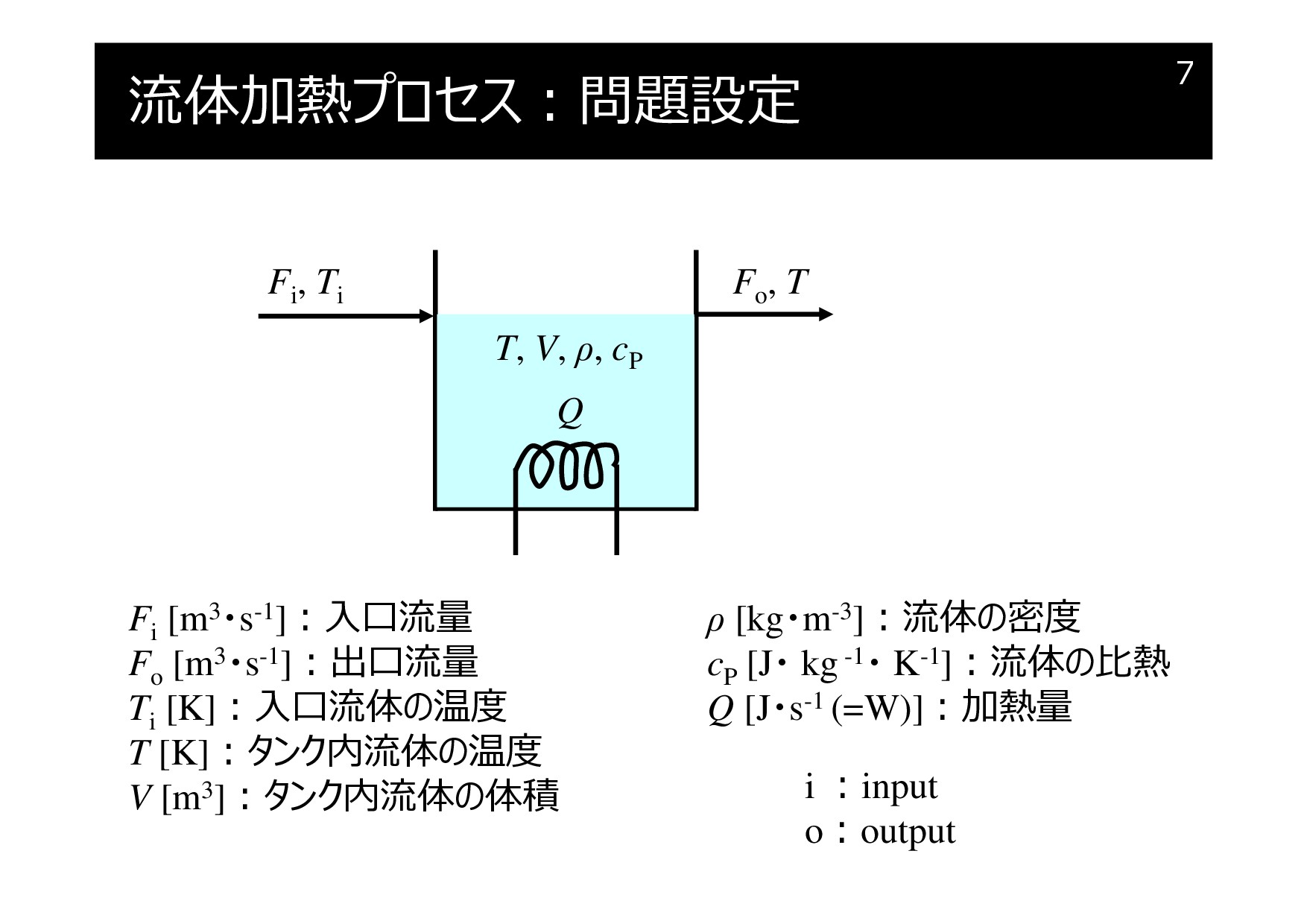
流体加熱プロセス:問題設定
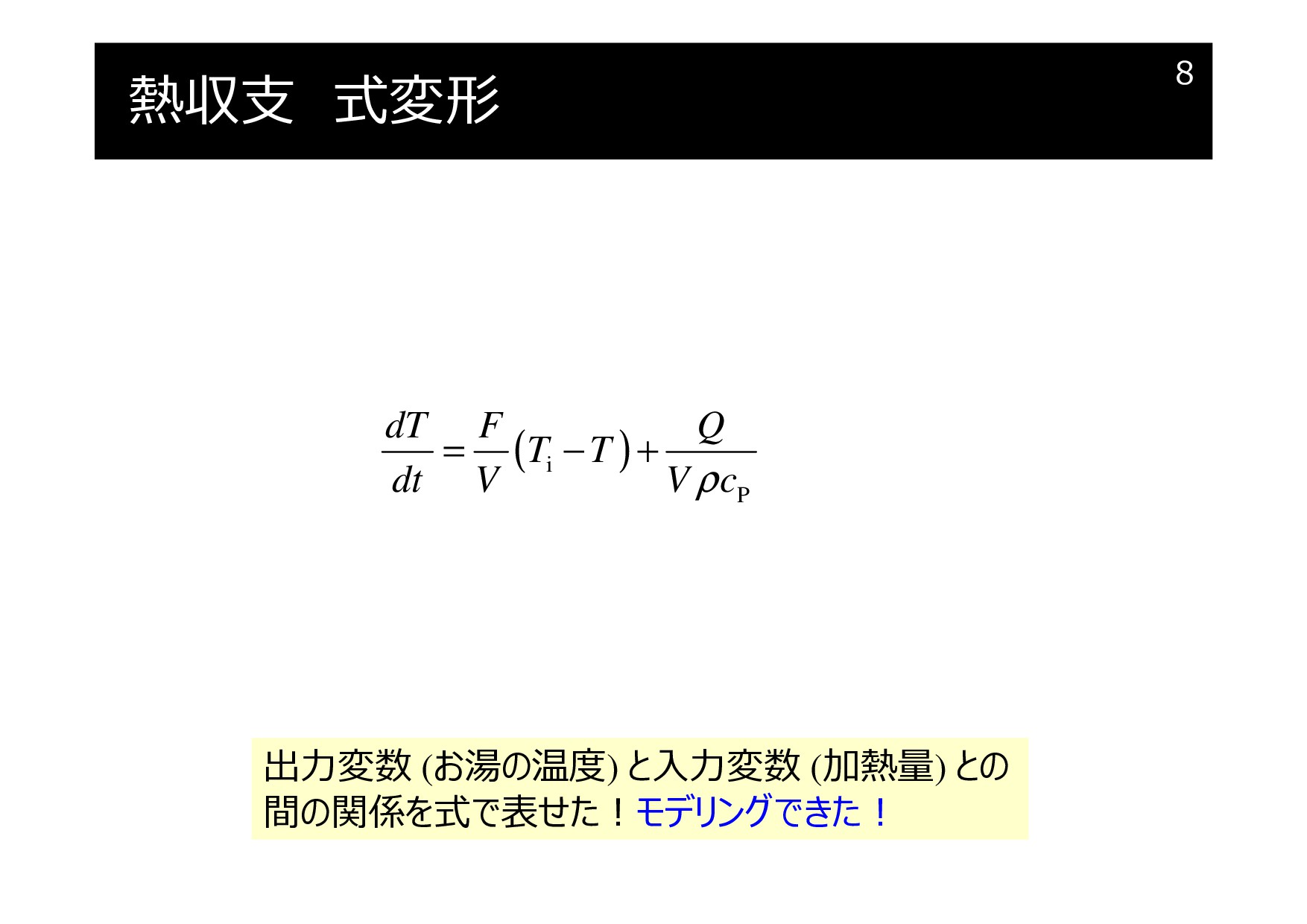
熱収支 式変形
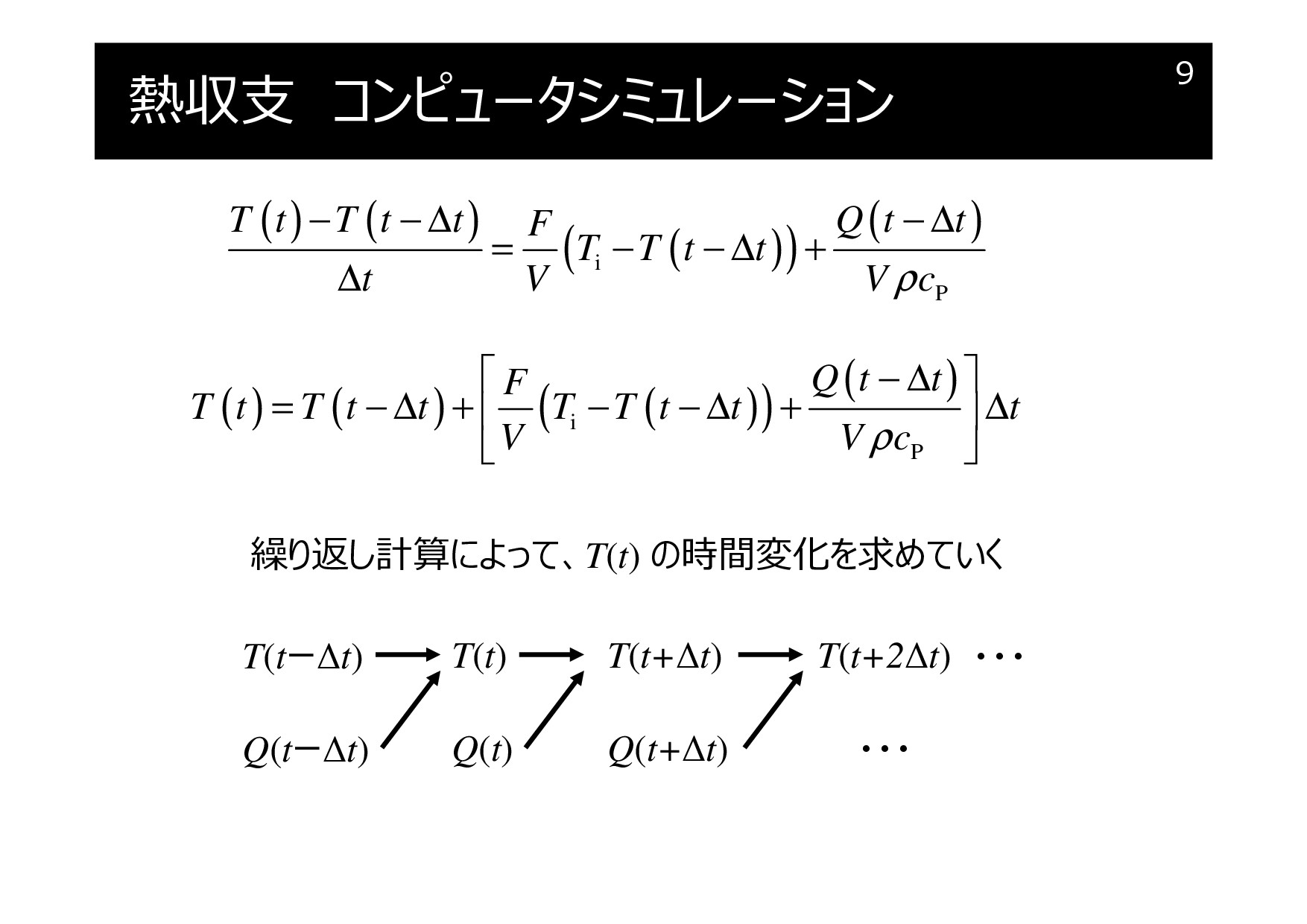
熱収支 コンピュータシミュレーション
流体加熱プロセスのシミュレーション
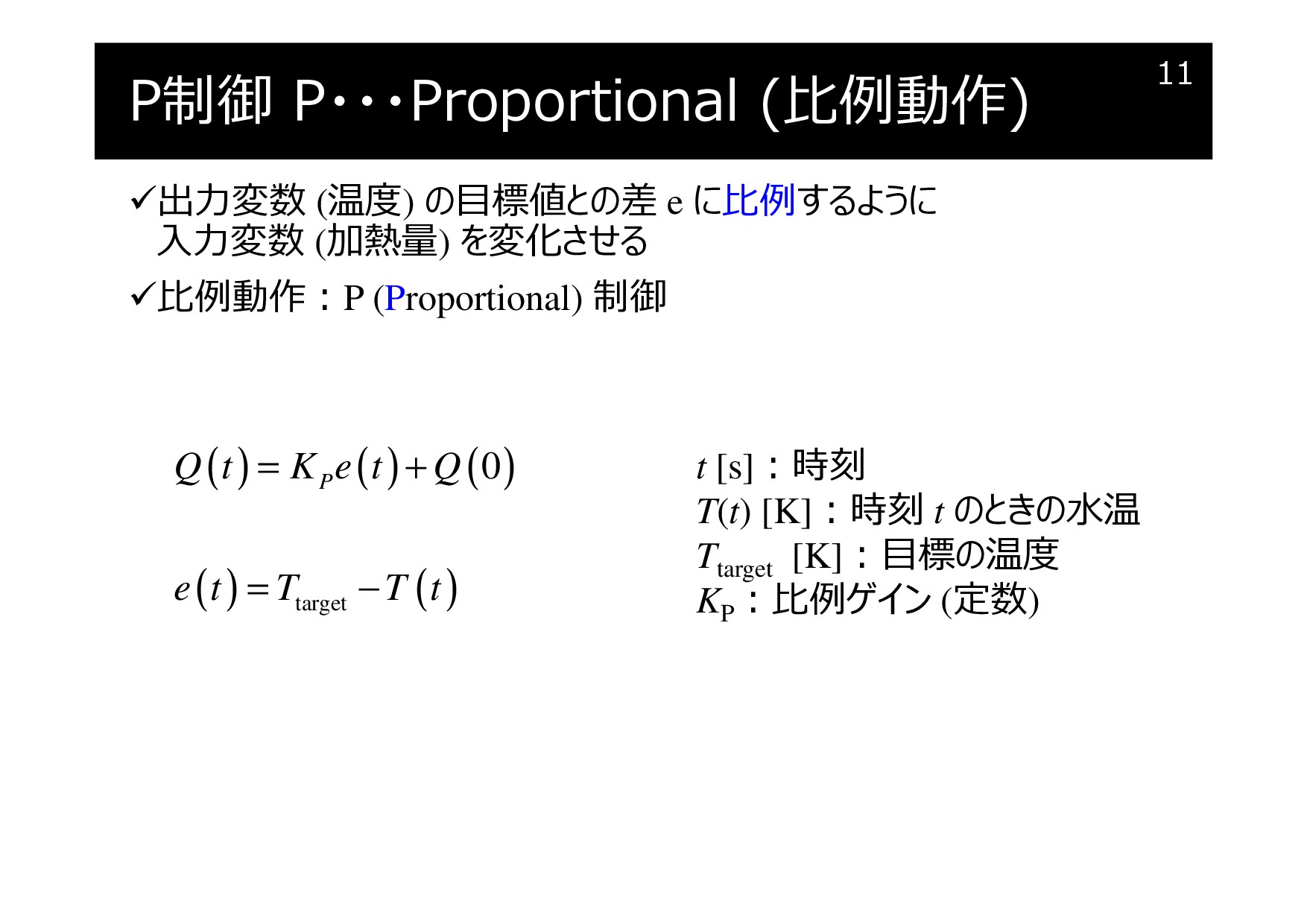
P制御 P・・・Proportional (比例動作)
P制御の問題点は?
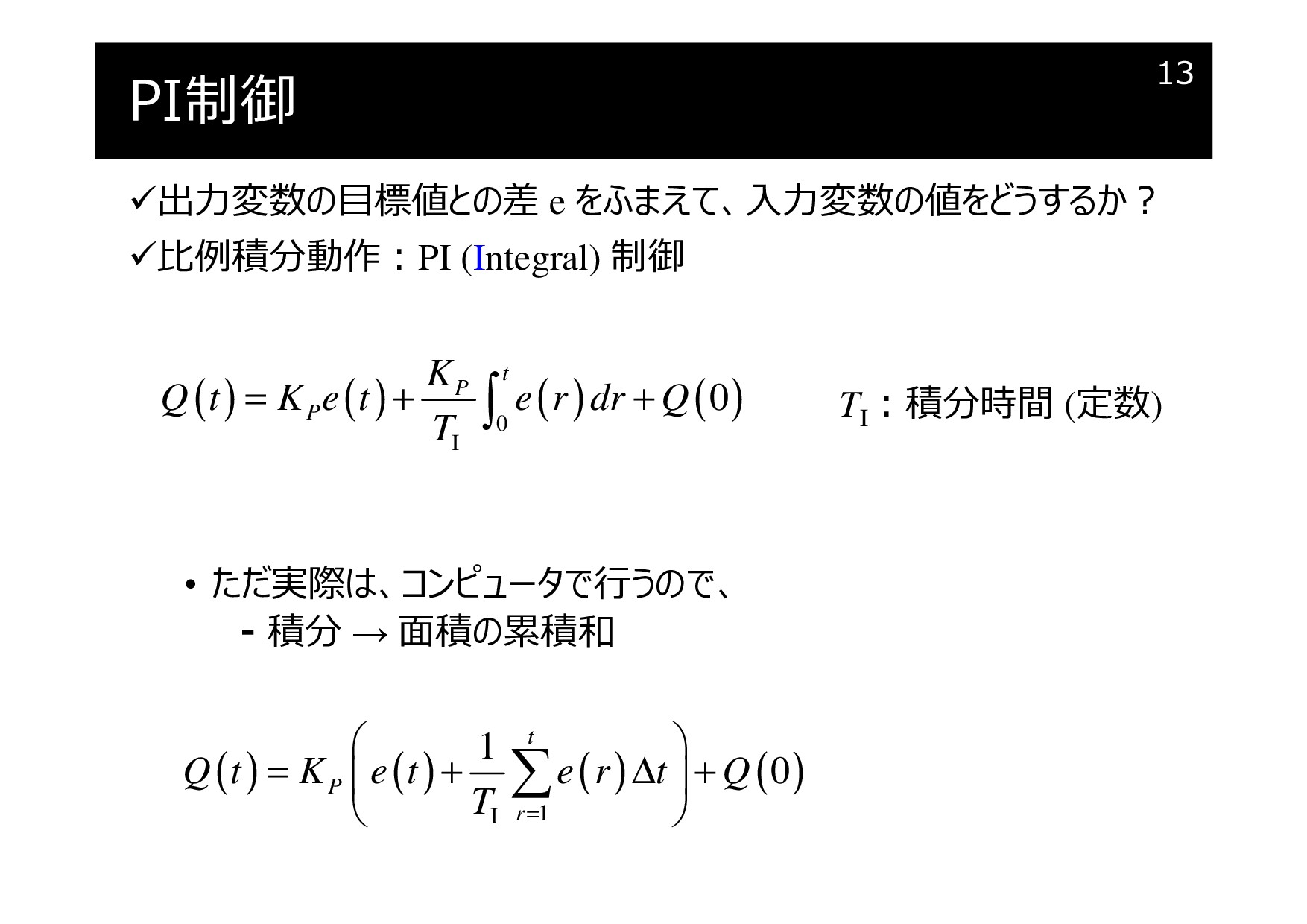
PI制御
今日の内容
良い制御?
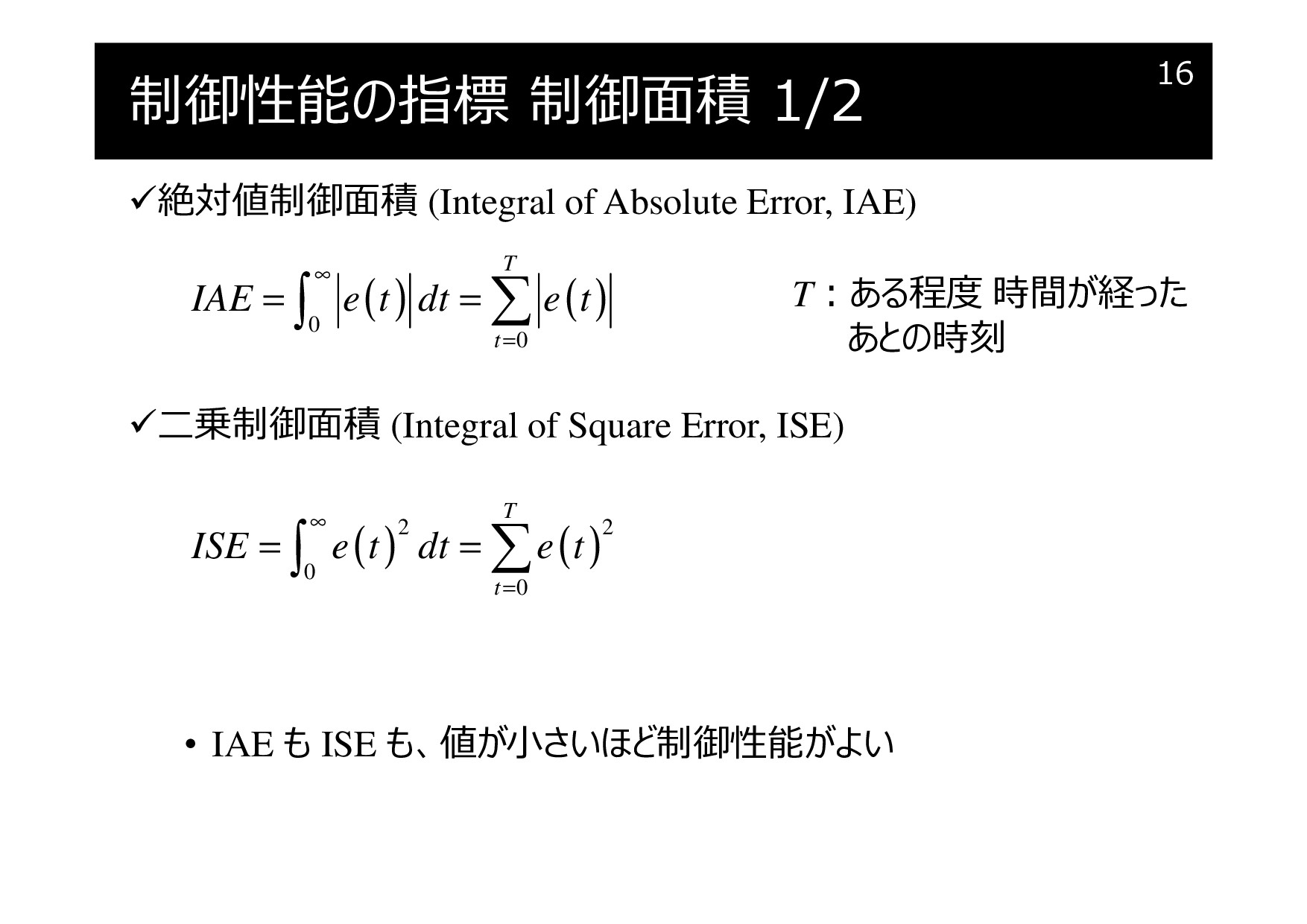
制御性能の指標 制御面積 1/2
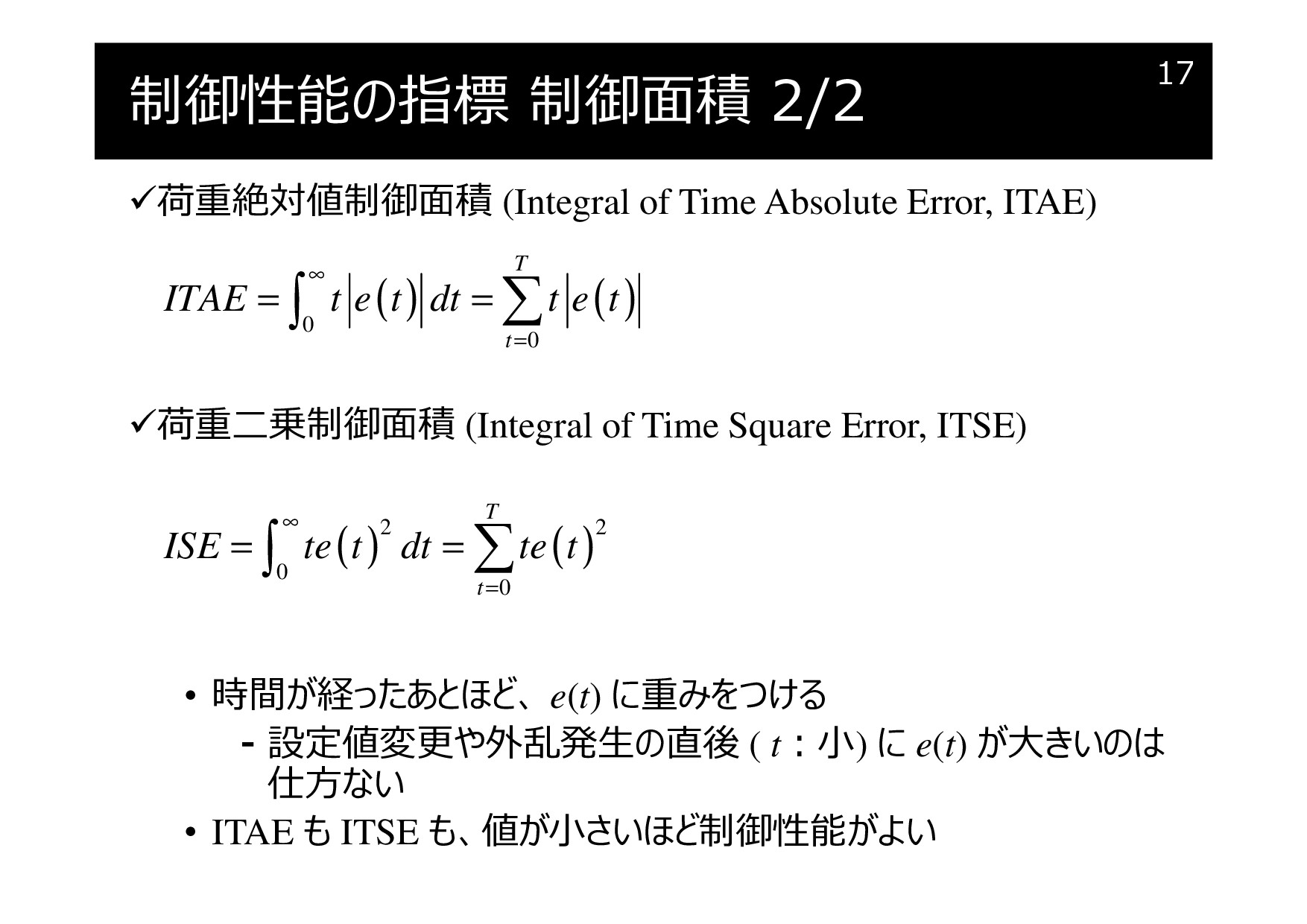
制御性能の指標 制御面積 2/2
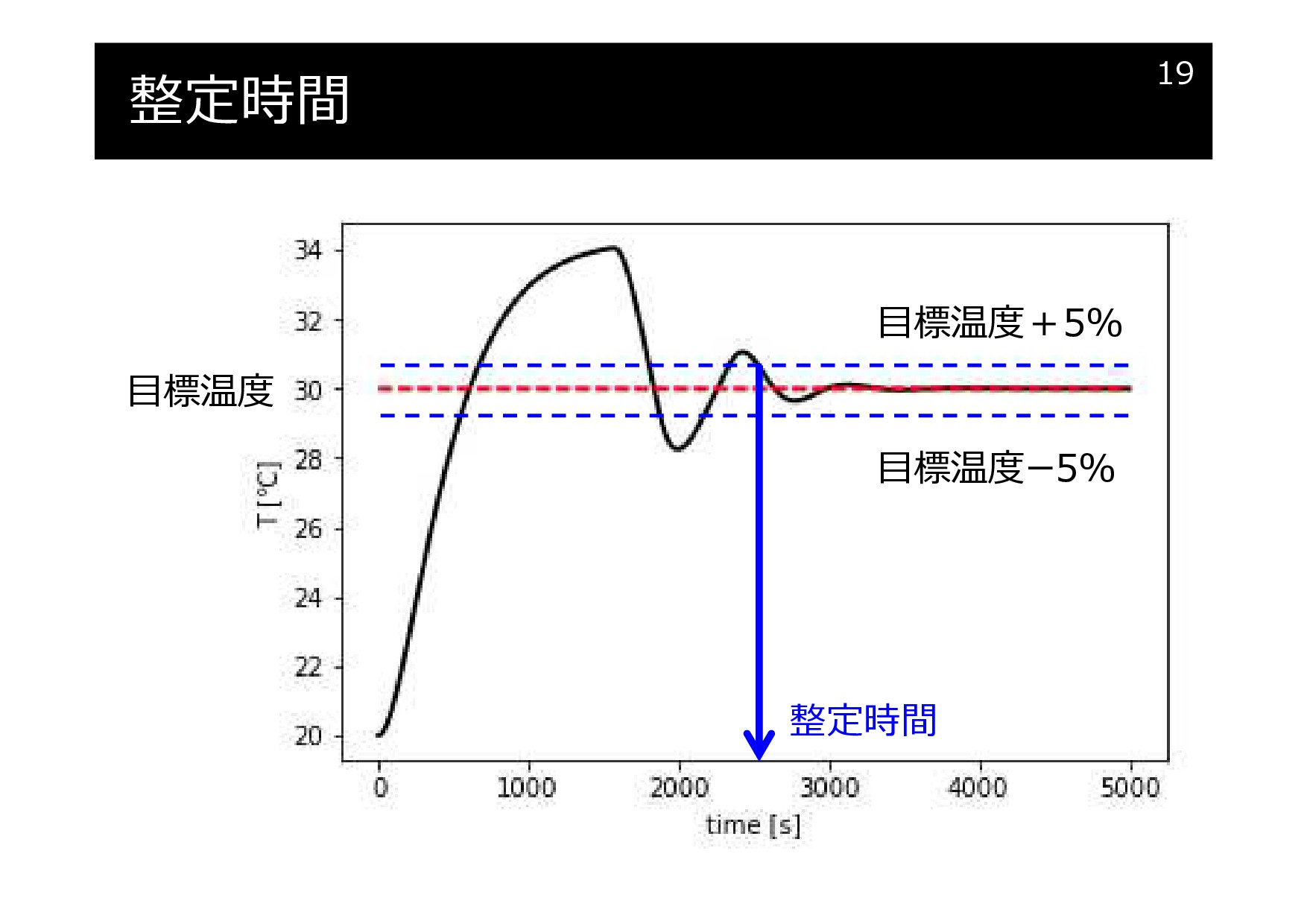
制御性能の指標 整定時間
整定時間
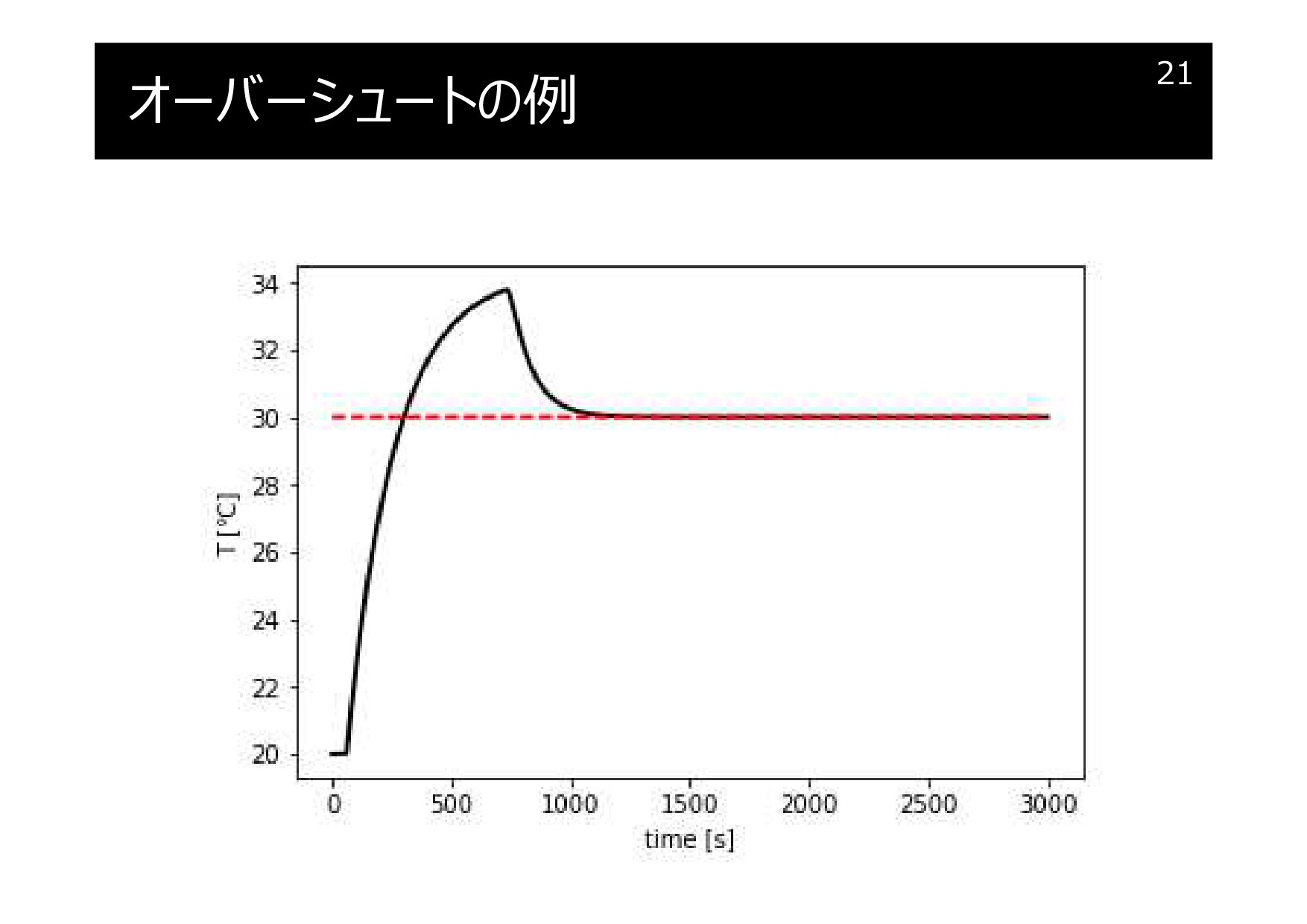
制御性能の指標 オーバーシュート(行き過ぎ)
オーバーシュートの例
制御性能 その他
PI制御のパラメータ
PI制御の問題点は?
PI制御の問題点
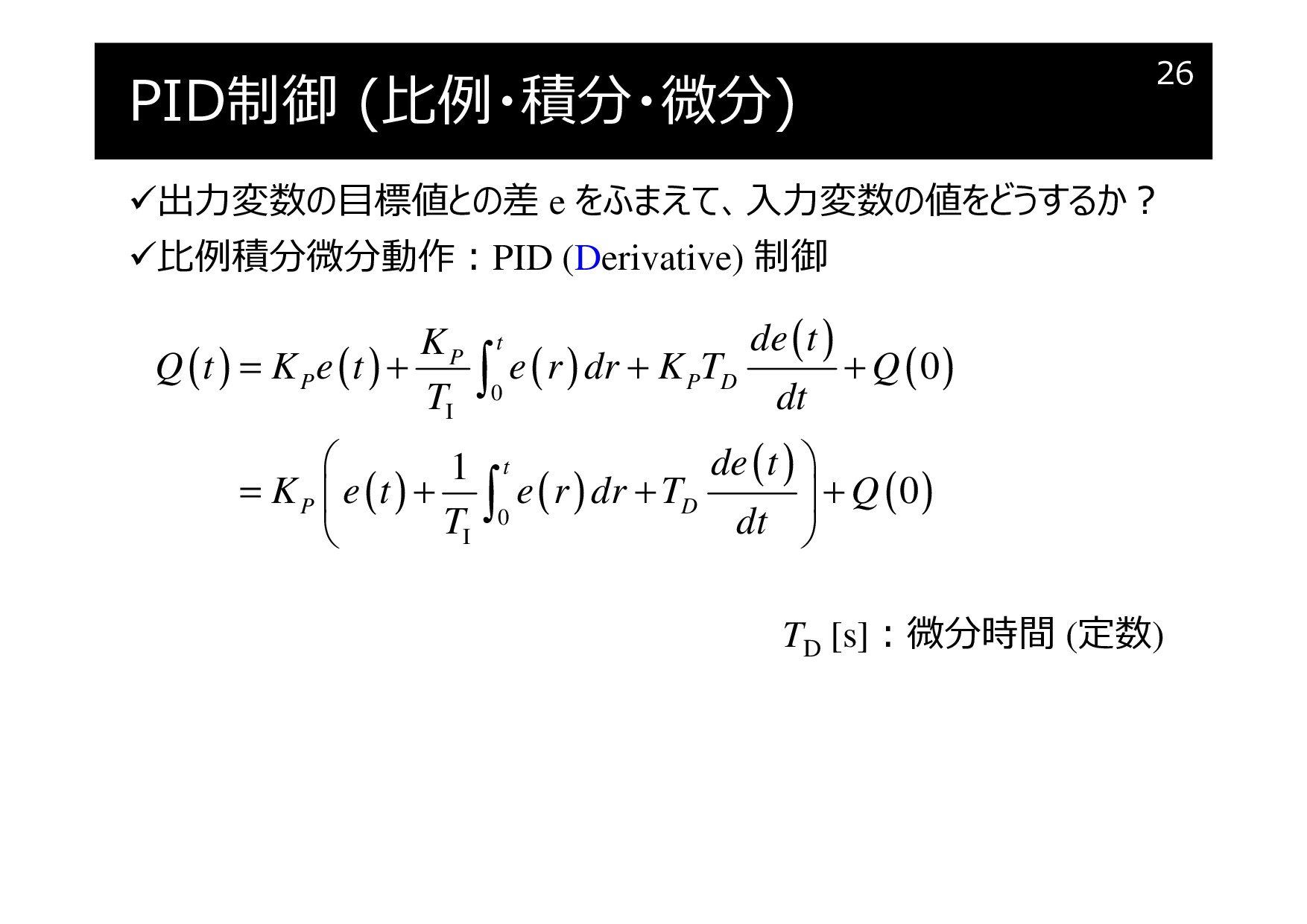
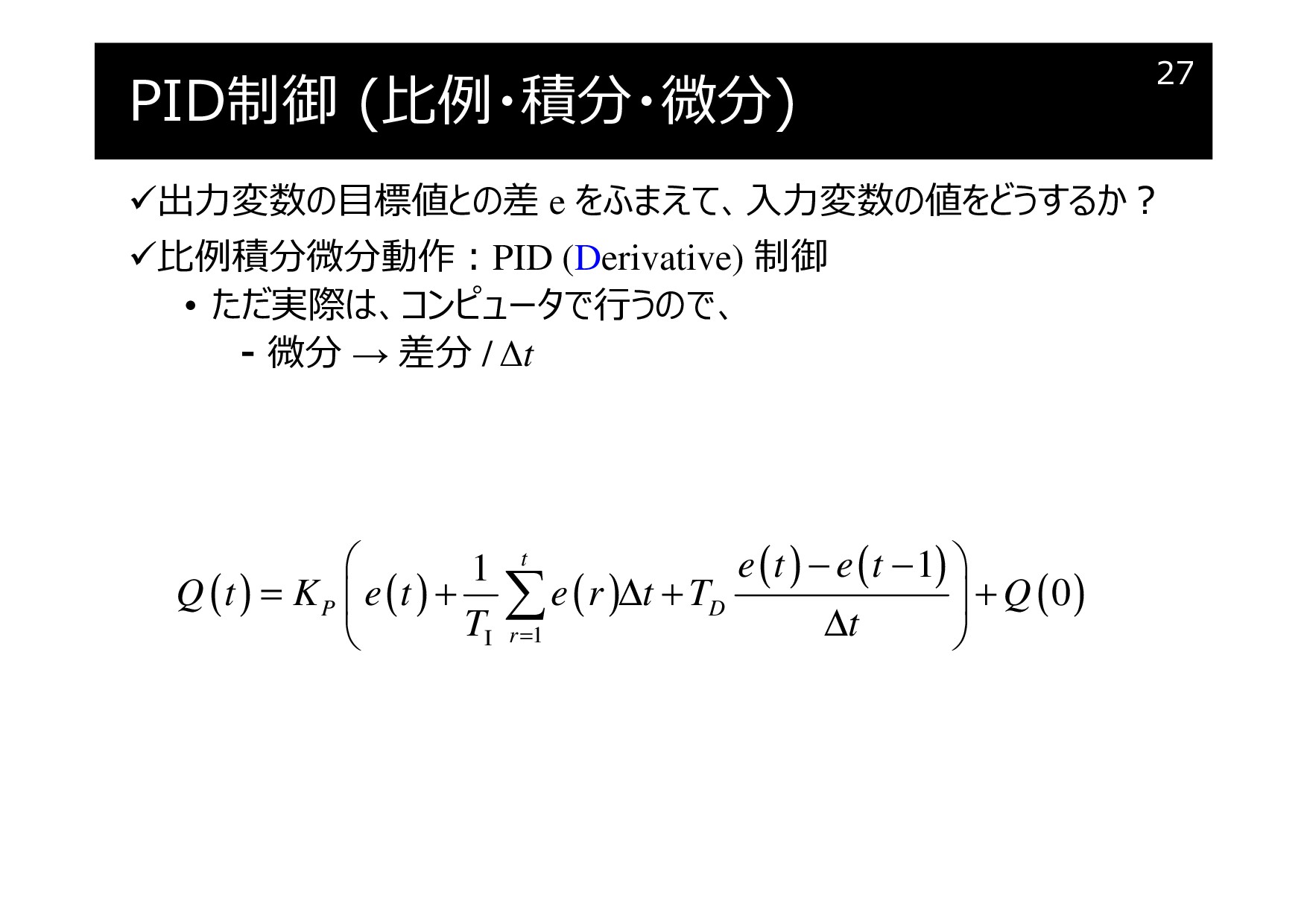
PID制御 (比例・積分・微分)
PID制御をしてみましょう!
微分時間の影響
こんなパラメータの決め方もあります
シミュレーションできたことのメリットを確認
理論的に攻める方法の問題点
出力変数と入力変数との関係
実験データを使う経験的な方法
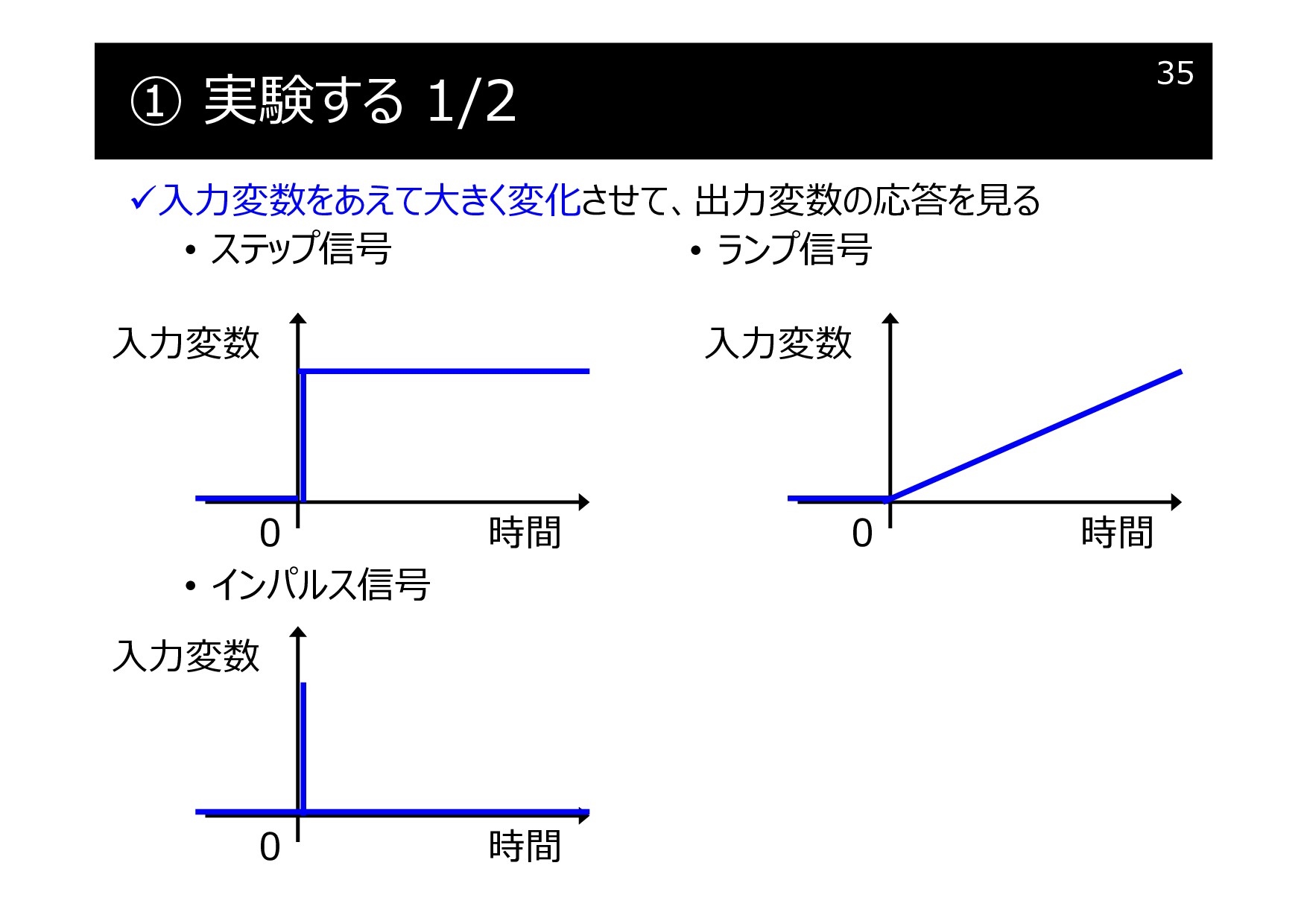
① 実験する 1/2
① 実験する 2/2
② モデルの概形を決める
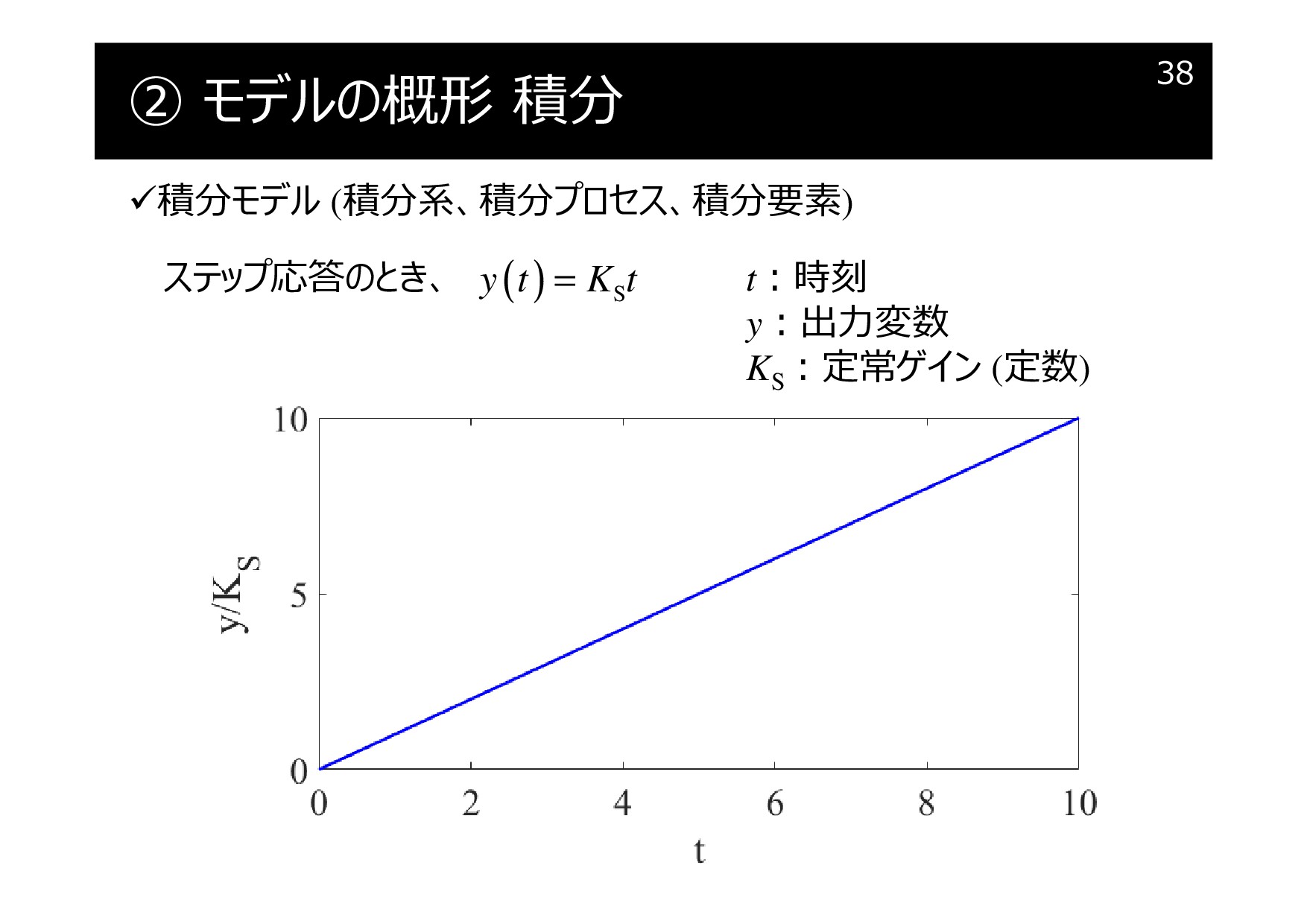
② モデルの概形 積分
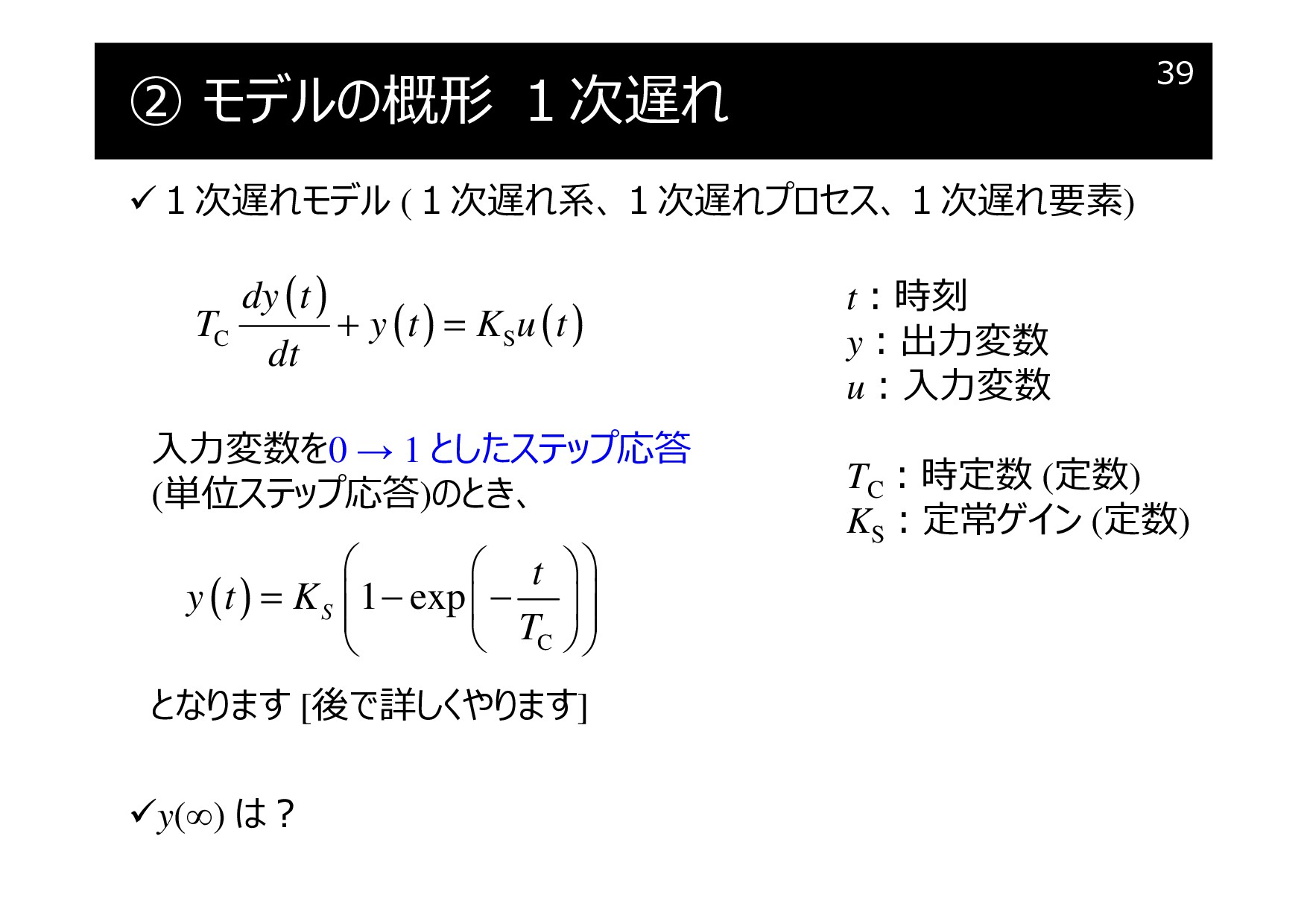
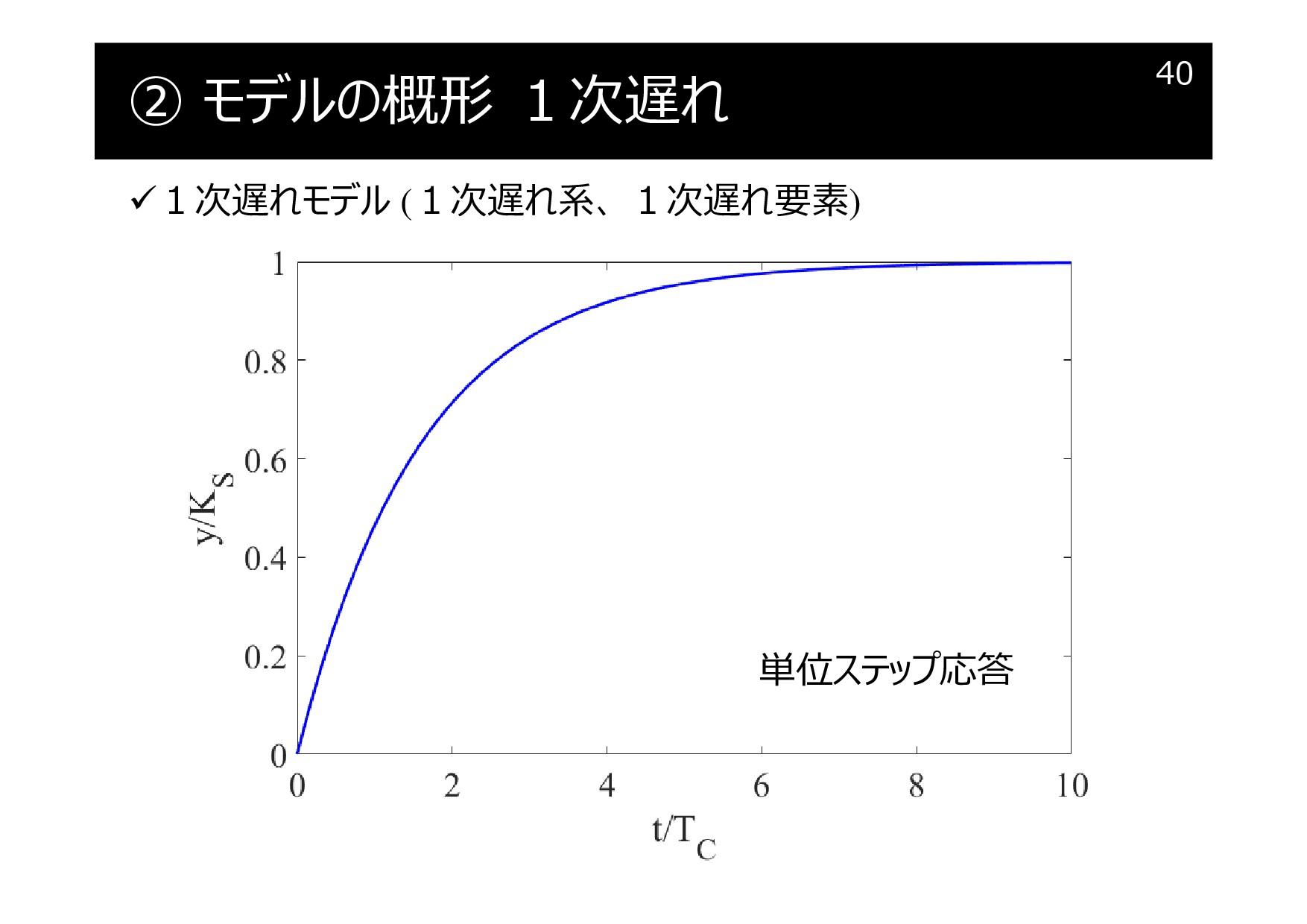
② モデルの概形 1次遅れ
② モデルの概形 1次遅れ
② [クイズ]
② [クイズ 回答]
{kind=link}
{kind=link}
{kind=link}
![制御とは︖ JIS (日本工業規格) の定義 [Z 8116] • 「ある目的に適合するように、制御対象に所要の操作を加えること」 3 望みのとおりになりそうなモノを、](https://files.speakerdeck.com/presentations/6fd9fef11323412eae5b83027eee047a/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![流体加熱プロセスのシミュレーション F [m3・s-1]︓入⼝流量・出⼝流量 = 0.00005 Ti [K]︓入⼝流体の温度 = 20 [℃]](https://files.speakerdeck.com/presentations/6fd9fef11323412eae5b83027eee047a/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![① 実験する 2/2 入⼒変数をあえて大きく変化させて、出⼒変数の応答を⾒る • ステップ信号 → ステップ応答 [最も一般的] •](https://files.speakerdeck.com/presentations/6fd9fef11323412eae5b83027eee047a/slide_36.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![② [クイズ] 41 ( ) ( ) i 0 P](https://files.speakerdeck.com/presentations/6fd9fef11323412eae5b83027eee047a/slide_41.jpg){kind=link}
![② [クイズ 回答] 42 ( ) i 0 P P](https://files.speakerdeck.com/presentations/6fd9fef11323412eae5b83027eee047a/slide_42.jpg){kind=link}