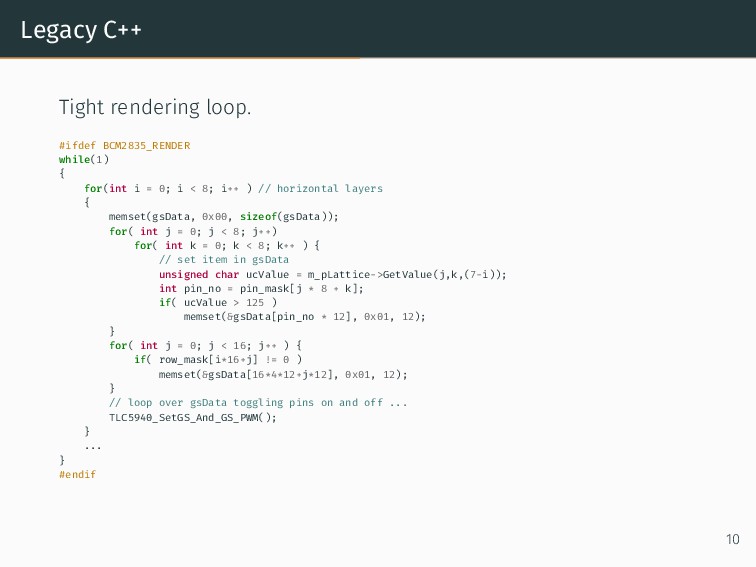
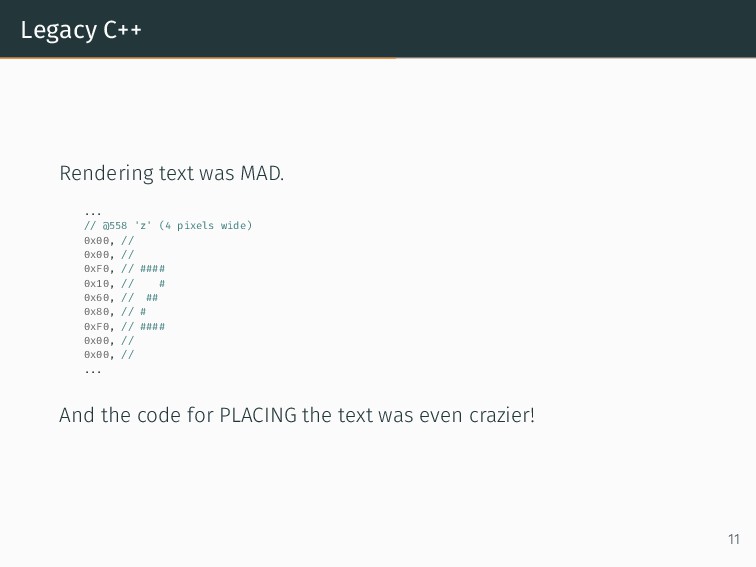
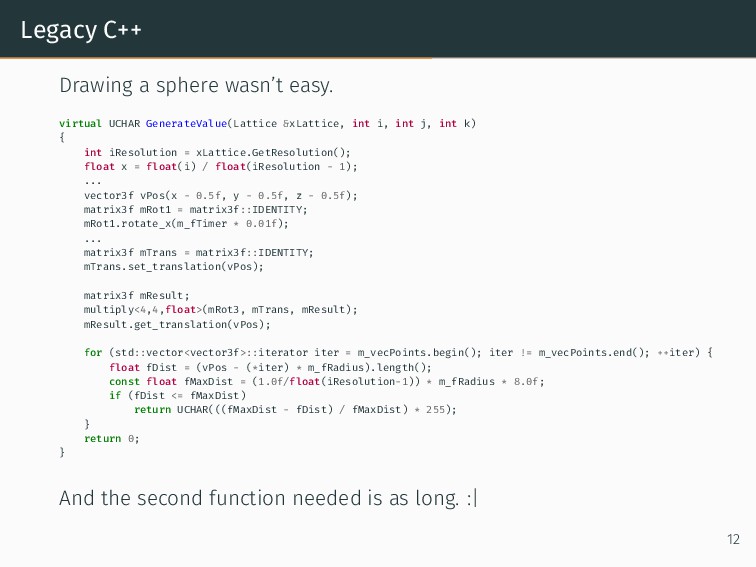
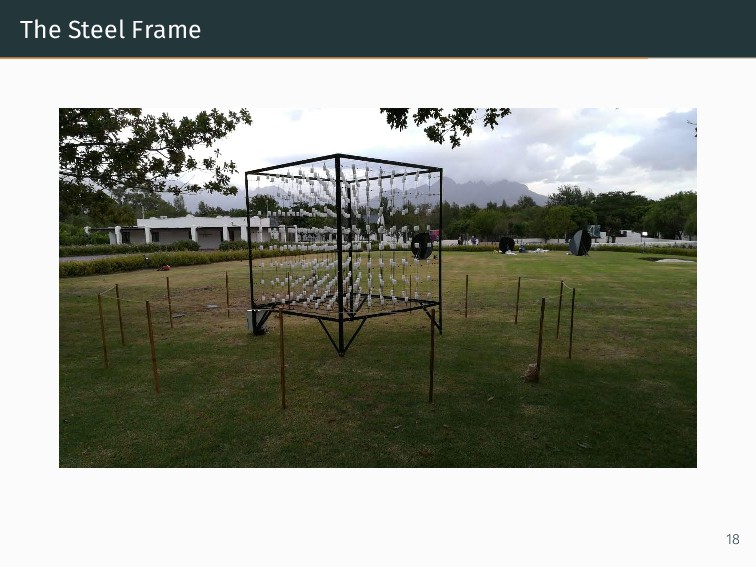
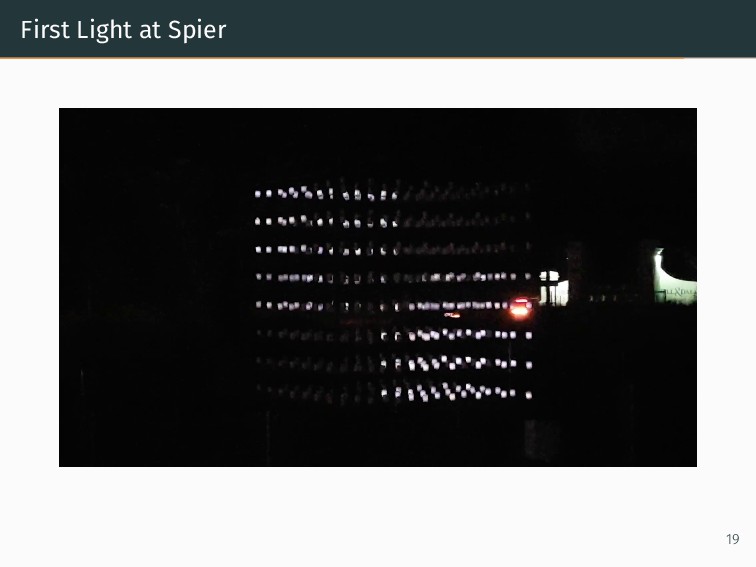
For an electronic artwork displayed at Spier's recent "Festival of Light" I had the opportunity (need?) to rewrite a legacy C code base for driving an LED cube from a Raspberry Pi.
While this might appear to be a talk about making code run faster, it's really a talk about thinking about software carefully at different levels, doing the right thing, not giving up when things are hard, and asking friends for help when needed.
Note: This is an entirely different talk about controlling LEDs with Python to the one I gave last year -- different artwork, completely different kind of LEDs and drivers, and no C involved at all!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}