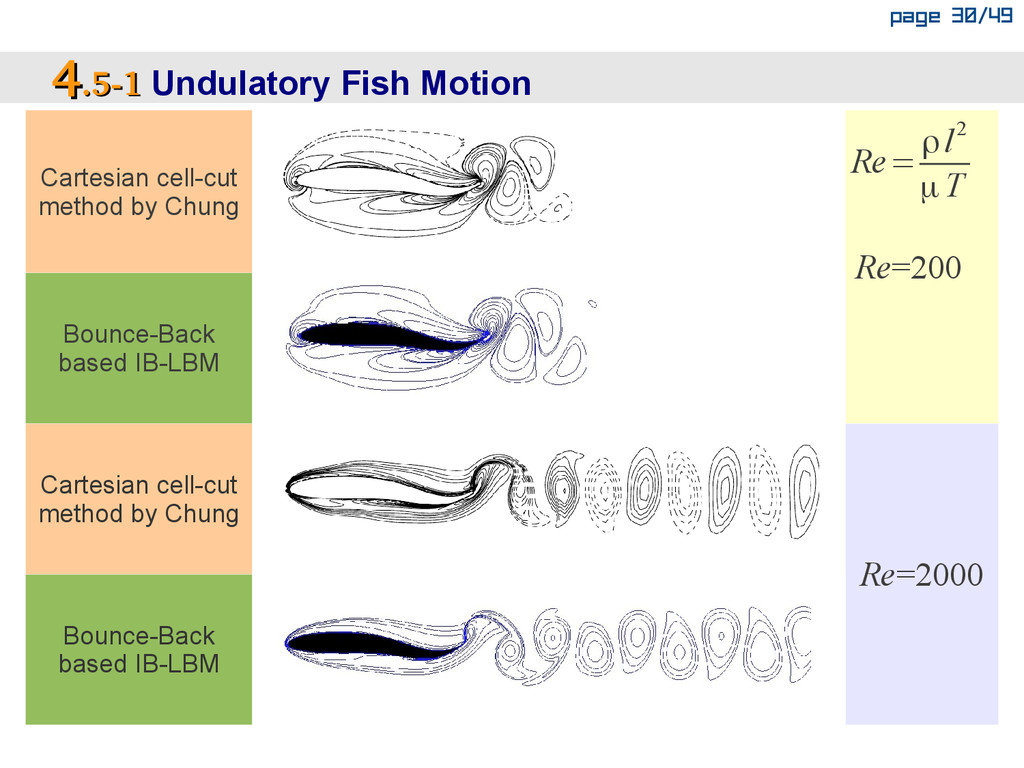
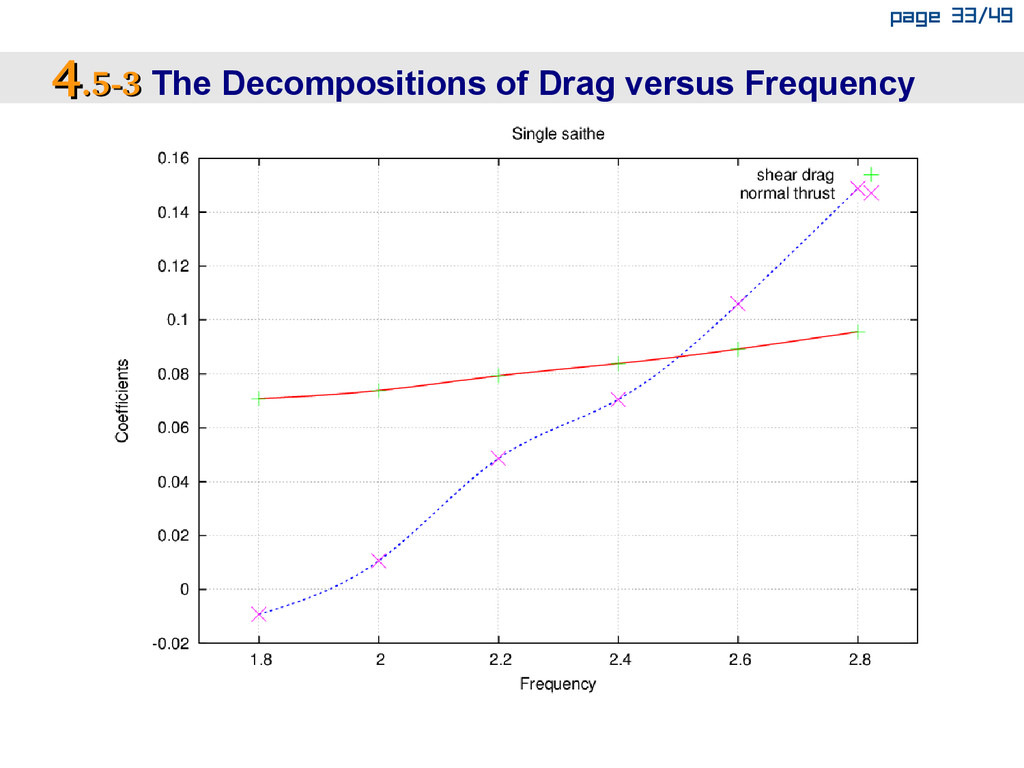
To study the problem whether there is any hydrodynamical function in fish schooling, an bounce-back based immersed-boundary lattice Boltzmann method was developed to cope with the moving boundary problem. A method to decompose the force into shear and normal force by momentum exchange in lattice Boltzmann method is provided. This algorithm performs as well as the accuracy of the theoretical analysis in stationary-boundary test, and the characteristics of the non-dimensional relaxation time τ is also discovered. In low Reynolds number flow, the results by the current method are comparable to the former experiments. Under the proposed numerical scheme, in two-dimensional fish schooling we proposed a new mechanism that infers the following fish just find the best place to follow by, instead of to arrange themselves in the regular position.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}