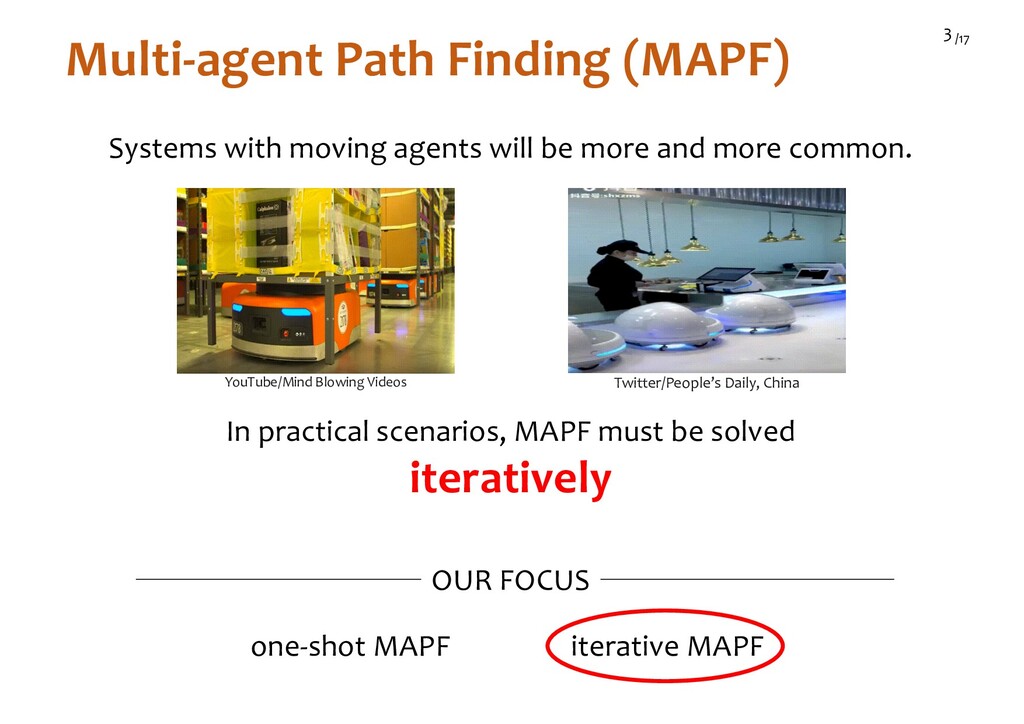
must be solved iteratively Systems with moving agents will be more and more common. YouTube/Mind Blowing Videos Twitter/People’s Daily, China OUR FOCUS one-shot MAPF iterative MAPF
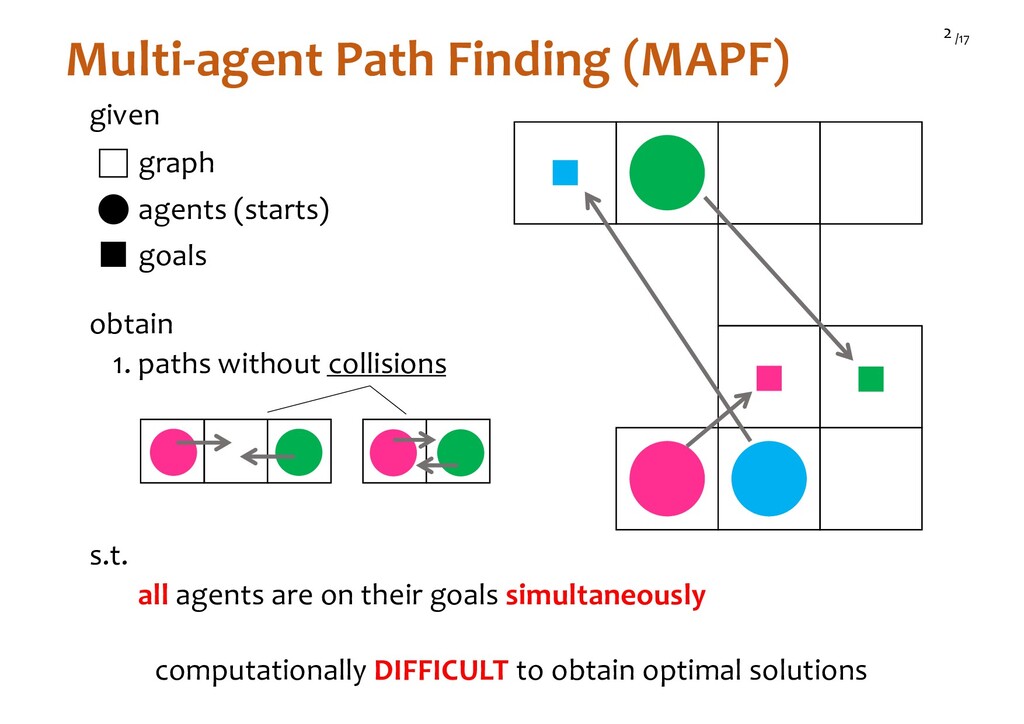
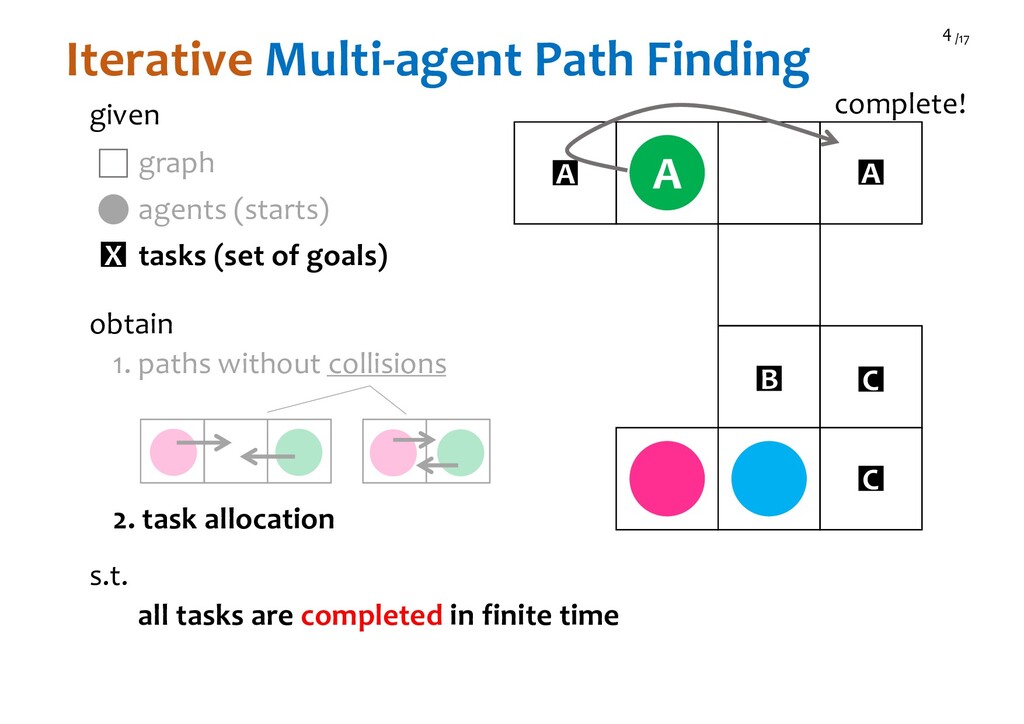
agents (starts) graph tasks (set of goals) X obtain 1. paths without collisions s.t. all tasks are completed in finite time 2. task allocation A C A complete!
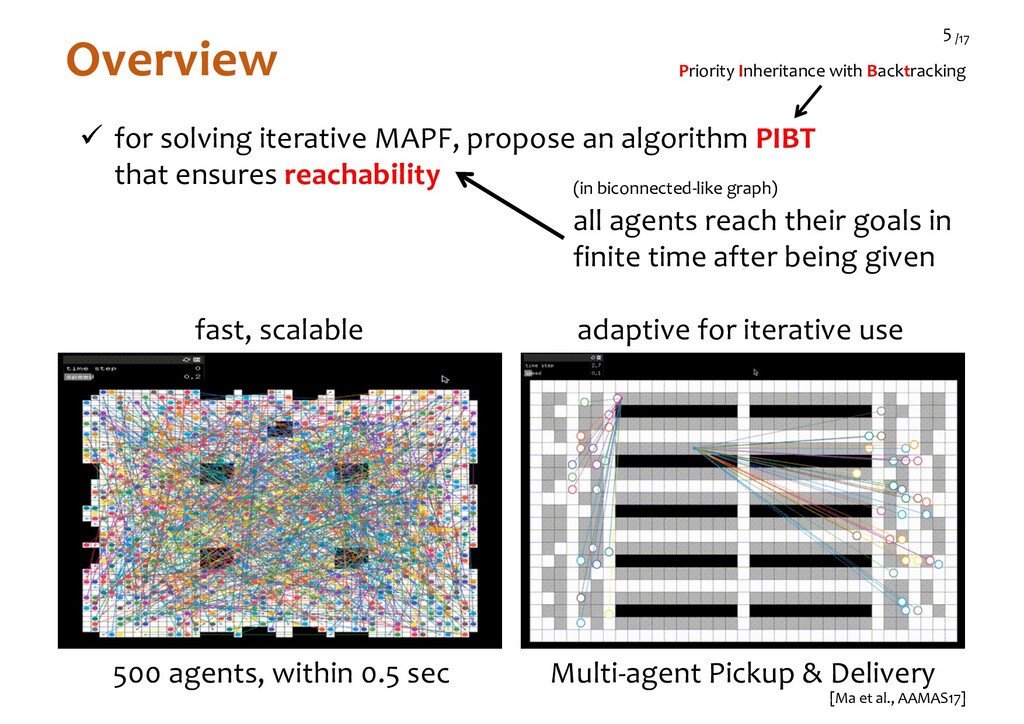
algorithm PIBT that ensures reachability 500 agents, within 0.5 sec fast, scalable all agents reach their goals in finite time after being given (in biconnected-like graph) Multi-agent Pickup & Delivery [Ma et al., AAMAS17] adaptive for iterative use Priority Inheritance with Backtracking
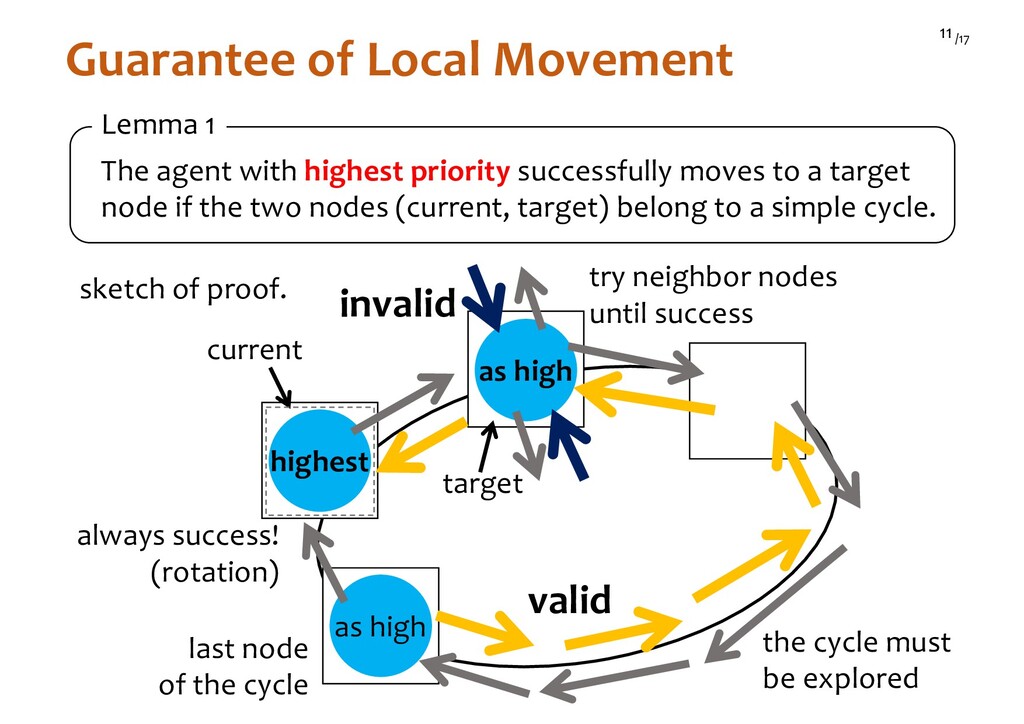
agent with highest priority successfully moves to a target node if the two nodes (current, target) belong to a simple cycle. Lemma 1 highest as high as high the cycle must be explored try neighbor nodes until success target last node of the cycle invalid valid current always success! (rotation)
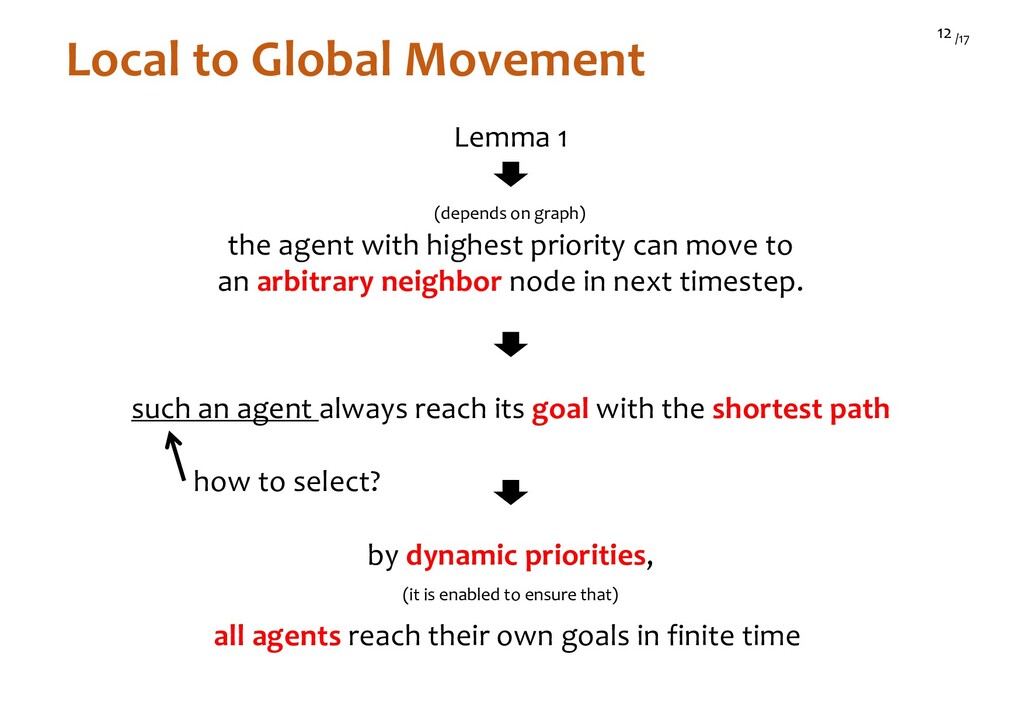
with highest priority can move to an arbitrary neighbor node in next timestep. (depends on graph) such an agent always reach its goal with the shortest path how to select? by dynamic priorities, (it is enabled to ensure that) all agents reach their own goals in finite time
it drops priority. Agents that have not reached goal have higher priority. pi(t) ⌘i(t) + ✏i <latexit sha1_base64="AVKYBP7oENlayRSOsgLuj/iMBD8=">AAACeHicbZHNThRBFIVrGn9w/GHApZuKEyNoMulGoy6Jblxi4gAJPencrrk9VKi/VN0WJ53mGXgat/IavIorq4dJQMabVHLynXsW91TplAyUple9ZO3e/QcP1x/1Hz95+mxjsLl1EGztBY6FVdYflRBQSYNjkqTwyHkEXSo8LE+/dP7hD/RBWvOd5g4nGmZGVlIARVQM3riike027fBcYUXgvT3jORIUsoNvo3ZBqrgqi8EwHaWL4asiW4ohW85+sdn7kE+tqDUaEgpCOM5SR5MGPEmhsO3ndUAH4hRmeBylAY1h0iyOavmrSKa8sj4+Q3xBbyca0CHMdRk3NdBJuOt18MYzeCas1mCmTQ5+puFn2+SdZ12Te80jO+9grqSWFNrVhDT/SUR4k7h9DVWfJo00riY04vqYqlacLO9+gU+lR0FqHgUIL2MfXJyAB0Hxr/qx6exur6viYHeUvRul394P9z4vO19nL9hLts0y9pHtsa9sn42ZYBfsF/vNLnt/Ep68TnauV5PeMvOc/TPJ7l8E68PB</latexit> elapsed timestep since last updated its goal, or, be zero if no goal ai <latexit sha1_base64="bKnDqKuin7Sp6S2MR2LJh+yFi9M=">AAACT3icbZFLSwMxFIUz9dXWZ3XpJlgEV2VGRV2KblxWtA/olHInTWswjyHJqGWo/8Ct/i6X/hJ3YqYOVFsvBA7fyYHckyjmzFjf//AKC4tLyyvFUnl1bX1jc6uy3TQq0YQ2iOJKtyMwlDNJG5ZZTtuxpiAiTlvR/WXmtx6oNkzJWzuKaVfAULIBI2AduoEe621V/Zo/GTwvglxUUT71XsU7CfuKJIJKSzgY0wn82HZT0JYRTsflMDE0BnIPQ9pxUoKgpptO3jrG+4708UBpd6TFE/o7kYIwZiQid1OAvTOzXgannqSPRAkBsp+GoIcCnsZpmHkqTkMtsGPPGQw5E8ya8XyCyX8SDk4Tv7exg7NuymScWCrJzzKDhGOrcFYu7jNNieUjJ4Bo5vrA5A40EOu+oOyaDmZ7nRfNw1pwVPOvj6vnF3nnRbSL9tABCtApOkdXqI4aiKAhekGv6M179z69r0J+teDlYgf9mULpG0Teth4=</latexit> tie-breaker, in [0, 1) unique between agents unique between agents for every timestep for an agent at timestep ai <latexit sha1_base64="bKnDqKuin7Sp6S2MR2LJh+yFi9M=">AAACT3icbZFLSwMxFIUz9dXWZ3XpJlgEV2VGRV2KblxWtA/olHInTWswjyHJqGWo/8Ct/i6X/hJ3YqYOVFsvBA7fyYHckyjmzFjf//AKC4tLyyvFUnl1bX1jc6uy3TQq0YQ2iOJKtyMwlDNJG5ZZTtuxpiAiTlvR/WXmtx6oNkzJWzuKaVfAULIBI2AduoEe621V/Zo/GTwvglxUUT71XsU7CfuKJIJKSzgY0wn82HZT0JYRTsflMDE0BnIPQ9pxUoKgpptO3jrG+4708UBpd6TFE/o7kYIwZiQid1OAvTOzXgannqSPRAkBsp+GoIcCnsZpmHkqTkMtsGPPGQw5E8ya8XyCyX8SDk4Tv7exg7NuymScWCrJzzKDhGOrcFYu7jNNieUjJ4Bo5vrA5A40EOu+oOyaDmZ7nRfNw1pwVPOvj6vnF3nnRbSL9tABCtApOkdXqI4aiKAhekGv6M179z69r0J+teDlYgf9mULpG0Teth4=</latexit> t <latexit sha1_base64="7adVWJLvurBhEiRLn+msARImvWs=">AAACTXicbZHNahsxFIU1Tts47l+cLrMRNYWuzEwb2ixDsunShjoOeAZzR752RPQzSHeamMF9gW7T5+q6D9JdKdU4A07jXhAcvqMDukd5oaSnOP4ZtXYePX6y297rPH32/MXL/e7BubelEzgSVll3kYNHJQ2OSJLCi8Ih6FzhOL86q/3xF3ReWvOZlgVmGhZGzqUACmhI0/1e3I/Xw7dF0ogea2Yw7UYf0pkVpUZDQoH3kyQuKKvAkRQKV5209FiAuIIFToI0oNFn1fqlK/4mkBmfWxeOIb6m9xMVaO+XOg83NdClf+jVcOMZvBZWazCzKgW30HCzqtLas0WVOs0D+1rDVEktya+2E9L8JxHgJnF/G5ofZ5U0RUloxN0y81Jxsryuls+kQ0FqGQQIJ0MfXFyCA0HhAzqh6eRhr9vi/F0/ed+Ph0e9k9Om8zY7ZK/ZW5awj+yEfWIDNmKCIfvGbtn36Ef0K/od/bm72oqazCv2z7R2/wLALLZU</latexit>
for all pairs of adjacent nodes, then, with PIBT, all agents reach their own goals within timesteps after being given. Theorem 2 G <latexit sha1_base64="yVMSfsXKkBgam/Vt6xvyf13//ws=">AAACTXicbZFLSwMxFIUz9V2f1aWbYBFclRkVdVl0oUsFq4JTyp30tgbzGJKMWob6B9zq73LtD3EnYqYWrNYLgcN3ciD3JEkFty4M34LSxOTU9MzsXHl+YXFpeaWyemF1Zhg2mBbaXCVgUXCFDcedwKvUIMhE4GVye1T4l3doLNfq3PVSbEroKt7hDJxHZ8etlWpYCwdDx0U0FFUynNNWJdiL25plEpVjAqy9jsLUNXMwjjOB/XKcWUyB3UIXr71UINE288FL+3TTkzbtaOOPcnRARxM5SGt7MvE3Jbgb+9cr4I+n8J5pKUG18xhMV8JDP48LT6d5bCT17LGAseCSO9sfT3D1T8LDn8ToNq5z0My5SjOHin0v08kEdZoW1dI2N8ic6HkBzHDfB2U3YIA5/wFl33T0t9dxcbFdi3Zq4dlutX447HyWrJMNskUisk/q5ISckgZhBMkTeSYvwWvwHnwEn99XS8Ews0Z+TWnmC2o3tic=</latexit> diam(G) · |A| <latexit sha1_base64="Asn8QhFjVGk7W4BNG/bJ+1yoTx8=">AAACZXicbZHNThRBFIVrGkEc/gYlunBBxYkJbibdaJAl4EKXmDhAQk8mt6vvDBXqp1N1W5g07cuw1QfyCXwNq4dJQMabVHLynXsW91RWKOkpjn+3ooUni0tPl5+1V1bX1jc6m89PvC2dwL6wyrqzDDwqabBPkhSeFQ5BZwpPs8tPjX/6HZ2X1nyjSYEDDWMjR1IABTTsvEoJr6nKJeh65/O7VOSW+M3hzbDTjXvxdPi8SGaiy2ZzPNxs7aW5FaVGQ0KB9+dJXNCgAkdSKKzbaemxAHEJYzwP0oBGP6imF9T8bSA5H1kXniE+pQ8TFWjvJzoLmxrowj/2GnjvGbwSVmsweZWCG2u4rqu08WxRpU7zwH40MFVSS/L1fEKa/yQCvE88vIZG+4NKmqIkNOLumFGpOFneVM5z6VCQmgQBwsnQBxcX4EBQ+Jh2aDp53Ou8ONntJe978dcP3YOjWefL7DV7w3ZYwj6yA/aFHbM+E6xmt+wn+9X6E61FW9HLu9WoNcu8YP9MtP0XJ+S8mw==</latexit> #agents NOT ensure that all agents be on their goals simultaneously! example - undirected: biconnected - directed: ring
et al., SoCS12] [Silver, AIIDE05] WHCA*-10 PIBT ost003d, 194x194 [Sturtevant, 2012] 300 agents *average over only success cases within the solver (in 100 times) path cost (steps) #agents computation time (sec.) #agents success (%) #agents
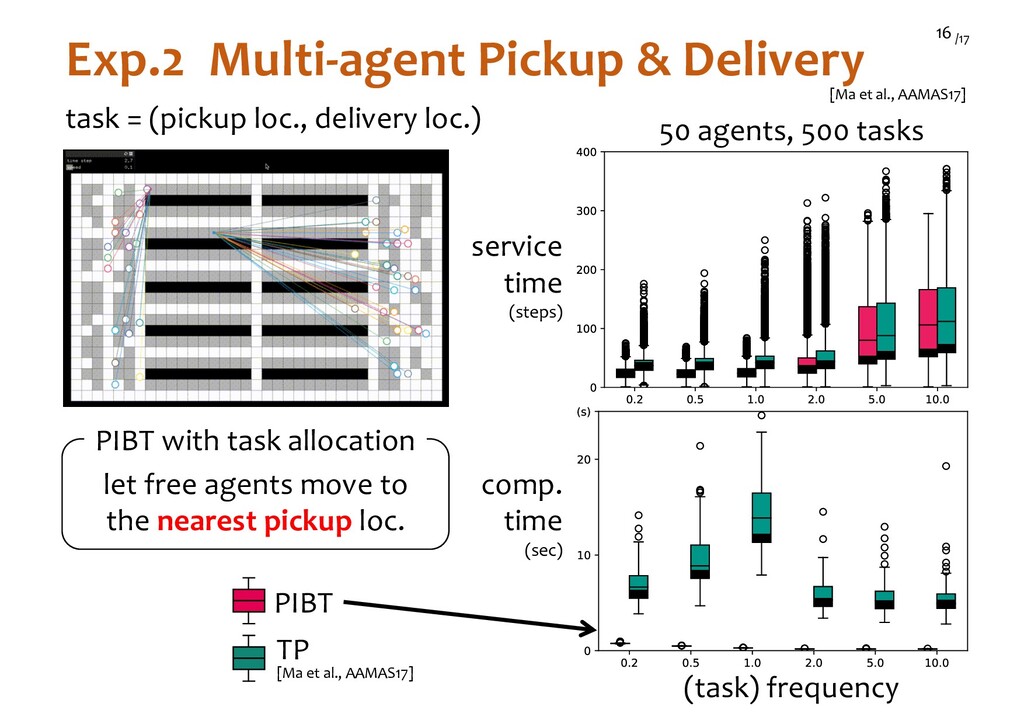
AAMAS17] PIBT TP [Ma et al., AAMAS17] task = (pickup loc., delivery loc.) let free agents move to the nearest pickup loc. PIBT with task allocation 50 agents, 500 tasks service time (steps) (task) frequency (task) frequency comp. time (sec)
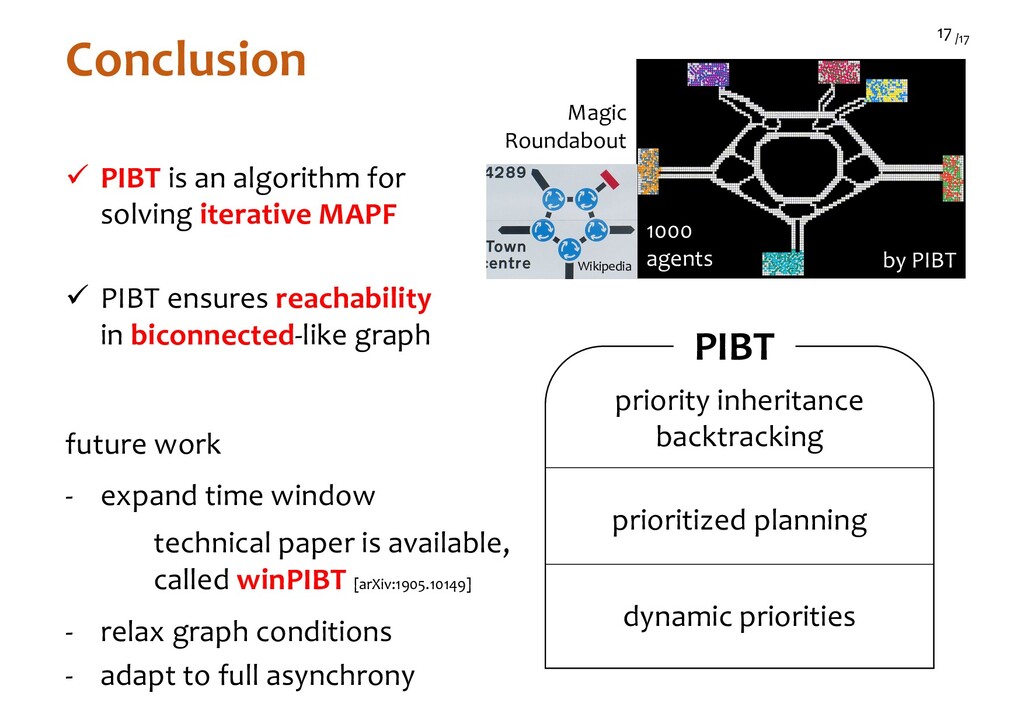
PIBT - adapt to full asynchrony ü PIBT is an algorithm for solving iterative MAPF ü PIBT ensures reachability in biconnected-like graph future work - expand time window - relax graph conditions Magic Roundabout Wikipedia 1000 agents technical paper is available, called winPIBT [arXiv:1905.10149] by PIBT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}