Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[Journal club] Pix2seq: A Language Modeling Fra...
Search
Semantic Machine Intelligence Lab., Keio Univ.
PRO
November 17, 2022
Technology
350
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[Journal club] Pix2seq: A Language Modeling Framework for Object Detection
Semantic Machine Intelligence Lab., Keio Univ.
PRO
November 17, 2022
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
81
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
86
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
98
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
Other Decks in Technology
See All in Technology
Vポイント分析基盤におけるデータモデリング20年史
taromatsui_cccmkhd
4
720
複数プロダクト組織のAIネイティブ化における戦略 / AICon2026_kude
rakus_dev
0
300
Alphaモジュール使っていいのかい!?いけないのかい!?どっちなんだいっ!?
watany
1
320
キャリアLT会#3
beli68
2
240
2026年のソフトウェア開発を考える(2026/07版) / Agentic Software Engineering 2026-07 Findy Edition
twada
PRO
25
11k
副作用のある Lambda でも Lambda Power Tuning は使えるのか / lambda-power-tuning-side-effects
koukihosaka
1
140
SRENEXT_2026_Chairs__Talks_in_Tamachi.sre.pdf
srenext
1
140
事業成長とAI活用を止めないデータ基盤アーキテクチャの設計思想
hiracky16
0
510
reFACToring
moznion
0
180
kaonavi Tech Night#1
kaonavi
0
160
Oracle Exadata Database Service on Cloud@Customer X11M (ExaDB-C@C) サービス概要
oracle4engineer
PRO
2
8.5k
全社でのソフトウェアサプライチェーン攻撃対策をやってみた with Takumi Guard
z63d
0
270
Featured
See All Featured
WENDY [Excerpt]
tessaabrams
11
38k
brightonSEO & MeasureFest 2025 - Christian Goodrich - Winning strategies for Black Friday CRO & PPC
cargoodrich
3
750
Odyssey Design
rkendrick25
PRO
2
730
Bootstrapping a Software Product
garrettdimon
PRO
307
120k
How to Ace a Technical Interview
jacobian
281
24k
Chrome DevTools: State of the Union 2024 - Debugging React & Beyond
addyosmani
10
1.3k
Game over? The fight for quality and originality in the time of robots
wayneb77
1
230
Large-scale JavaScript Application Architecture
addyosmani
515
110k
What's in a price? How to price your products and services
michaelherold
247
13k
Leo the Paperboy
mayatellez
8
1.9k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
コードの90%をAIが書く世界で何が待っているのか / What awaits us in a world where 90% of the code is written by AI
rkaga
62
45k
Transcript
Ting Chen1, Saurabh Saxena1, Lala Li1, David J. Fleet1, Geoffrey
Hinton1 1: Google Research, Brain Team 慶應義塾大学 杉浦孔明研究室 小槻誠太郎 T. Chen, S. Saxena, L. Li, D.J. Fleet, and G. Hinton, “Pix2seq: A language modeling framework for object detection,” ICLR, 2022.
概要 – Pix2Seq 既存の物体検出モデルはタスクに特化した設定が多く為されていた ➔複雑な学習 / 汎用性の低下 物体検出を 入力画像で条件付けしたLanguage Modelingのような形で定式化
物体検出に特化した構造やengineeringを使用せず DETR, Faster R-CNNに対してcompetitiveな性能を達成 2
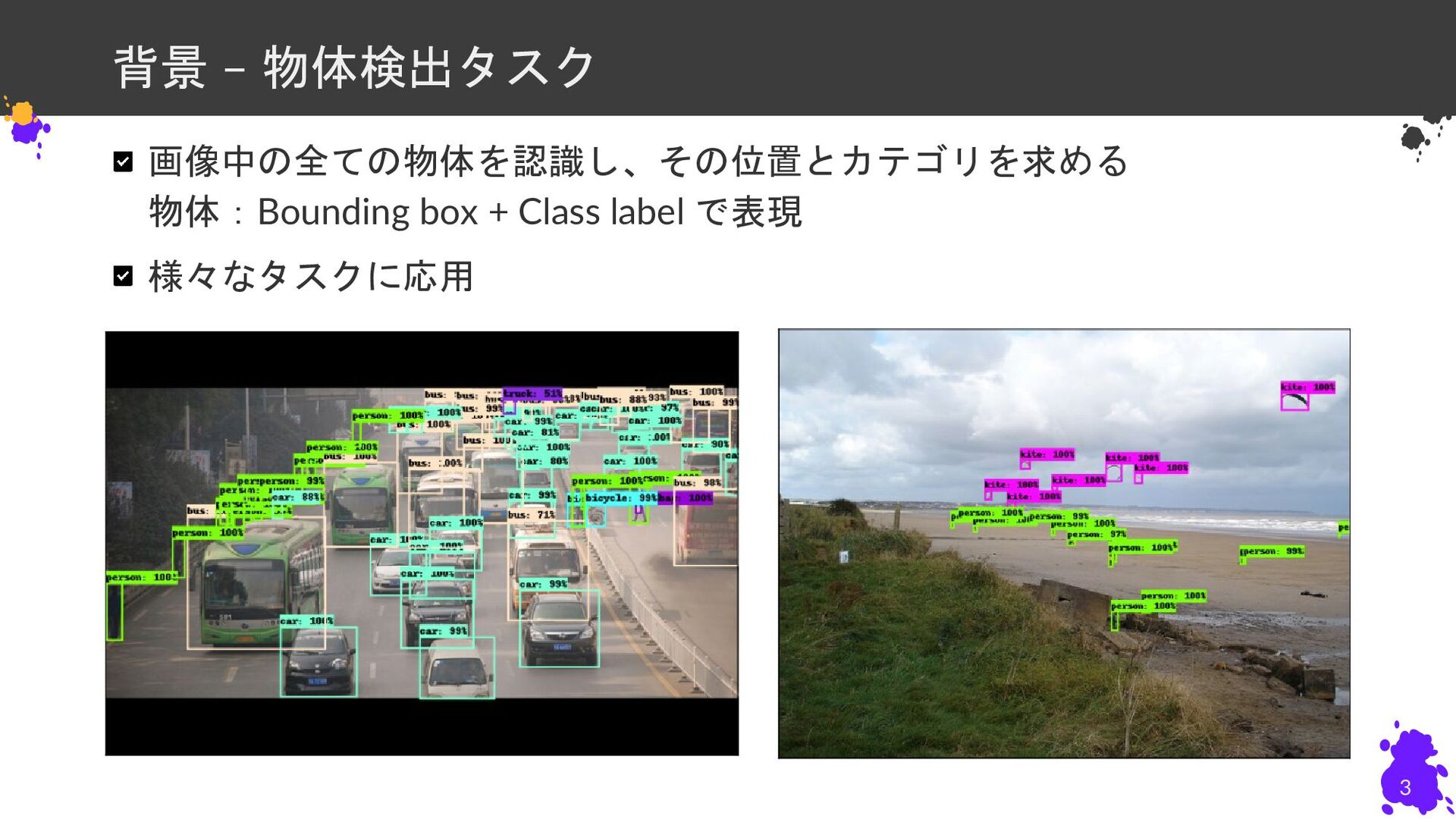
背景 – 物体検出タスク 画像中の全ての物体を認識し、その位置とカテゴリを求める 物体:Bounding box + Class label で表現
様々なタスクに応用 3
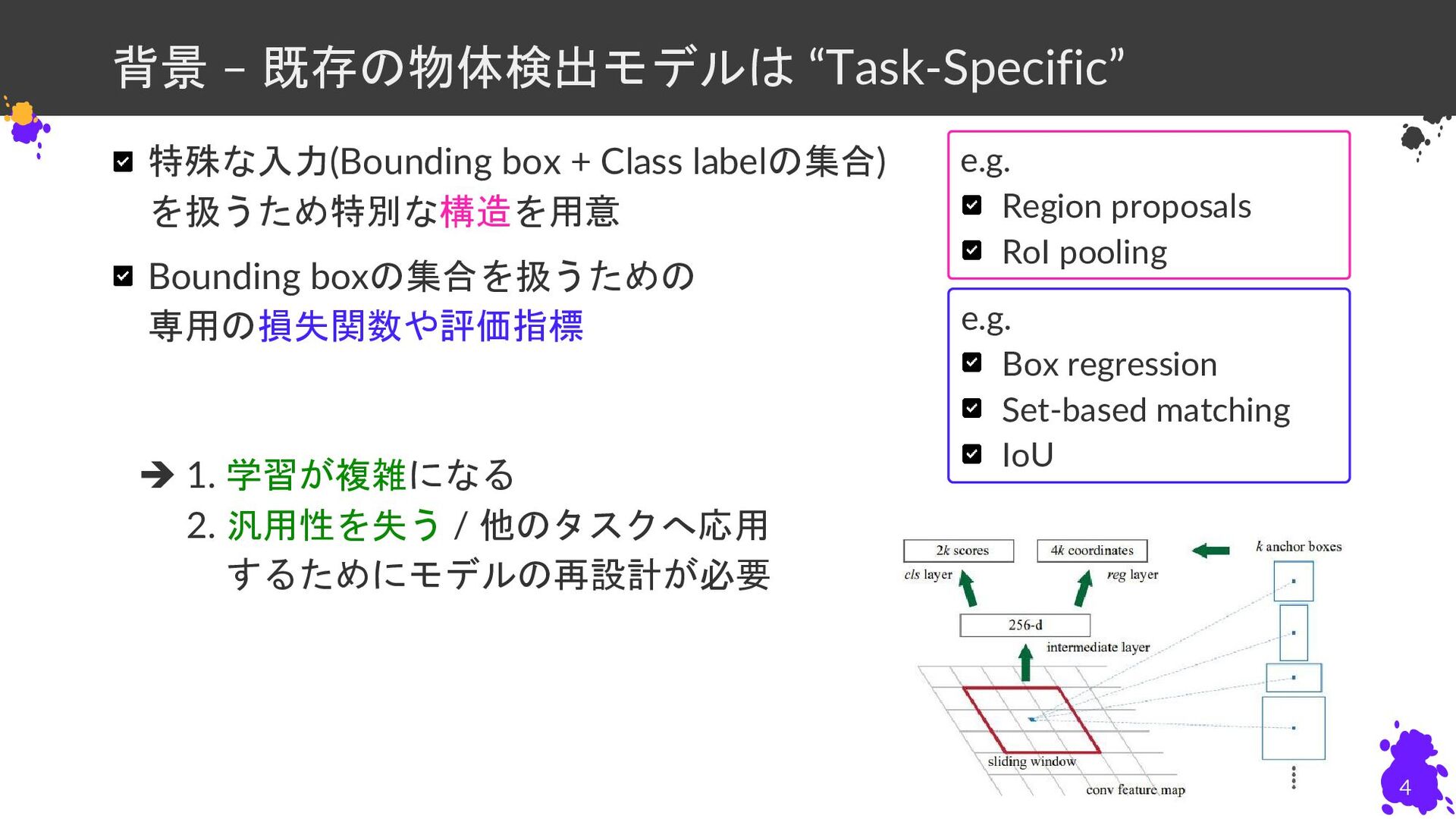
背景 – 既存の物体検出モデルは “Task-Specific” 特殊な入力(Bounding box + Class labelの集合) を扱うため特別な構造を用意
Bounding boxの集合を扱うための 専用の損失関数や評価指標 ➔ 1. 学習が複雑になる ➔ 2. 汎用性を失う / 他のタスクへ応用 ➔ 2. するためにモデルの再設計が必要 4 e.g. Region proposals RoI pooling e.g. Box regression Set-based matching IoU
関連研究 – 既存の物体検出モデルは “Task-Specific” 5 Faster R-CNN [Ren+, NeurIPS15] •
標準的な物体検出手法 • Bounding boxの集合を予測するため大量のProposal • 人手で設定する要素(Anchorsなど)に依存 • 重複を削除するためによくNMSが用いられる DETR [Carion+, ECCV20] • Transformerを採用し、End-to-Endの物体検出 • 大量のProposalを出してNMSを行うことを避けた • 学習で獲得する”object query”が必要
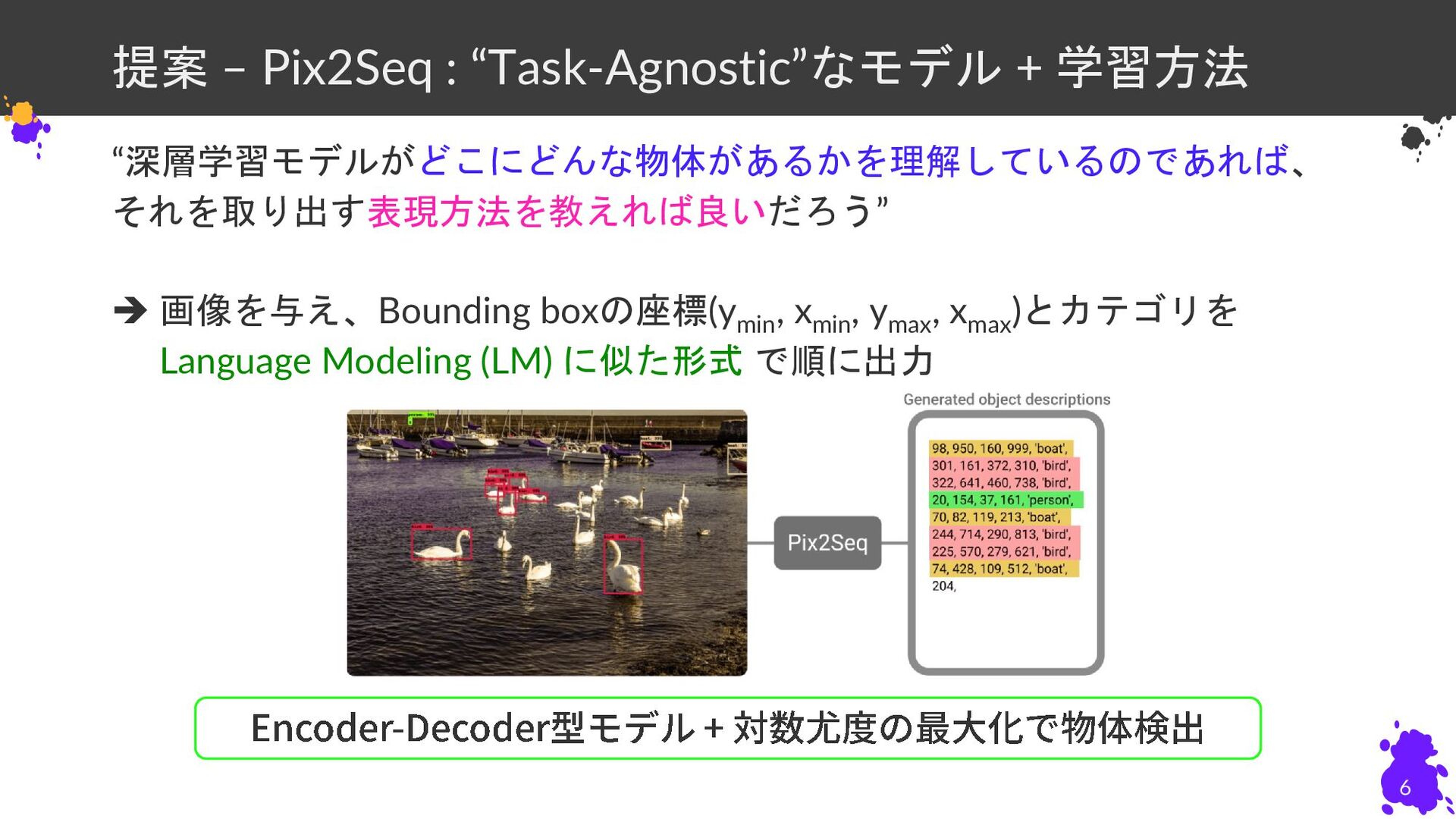
提案 – Pix2Seq : “Task-Agnostic”なモデル + 学習方法 “深層学習モデルがどこにどんな物体があるかを理解しているのであれば、 それを取り出す表現方法を教えれば良いだろう” ➔
画像を与え、Bounding boxの座標(y min , x min , y max , x max )とカテゴリを ➔ Language Modeling (LM) に似た形式 で順に出力 6
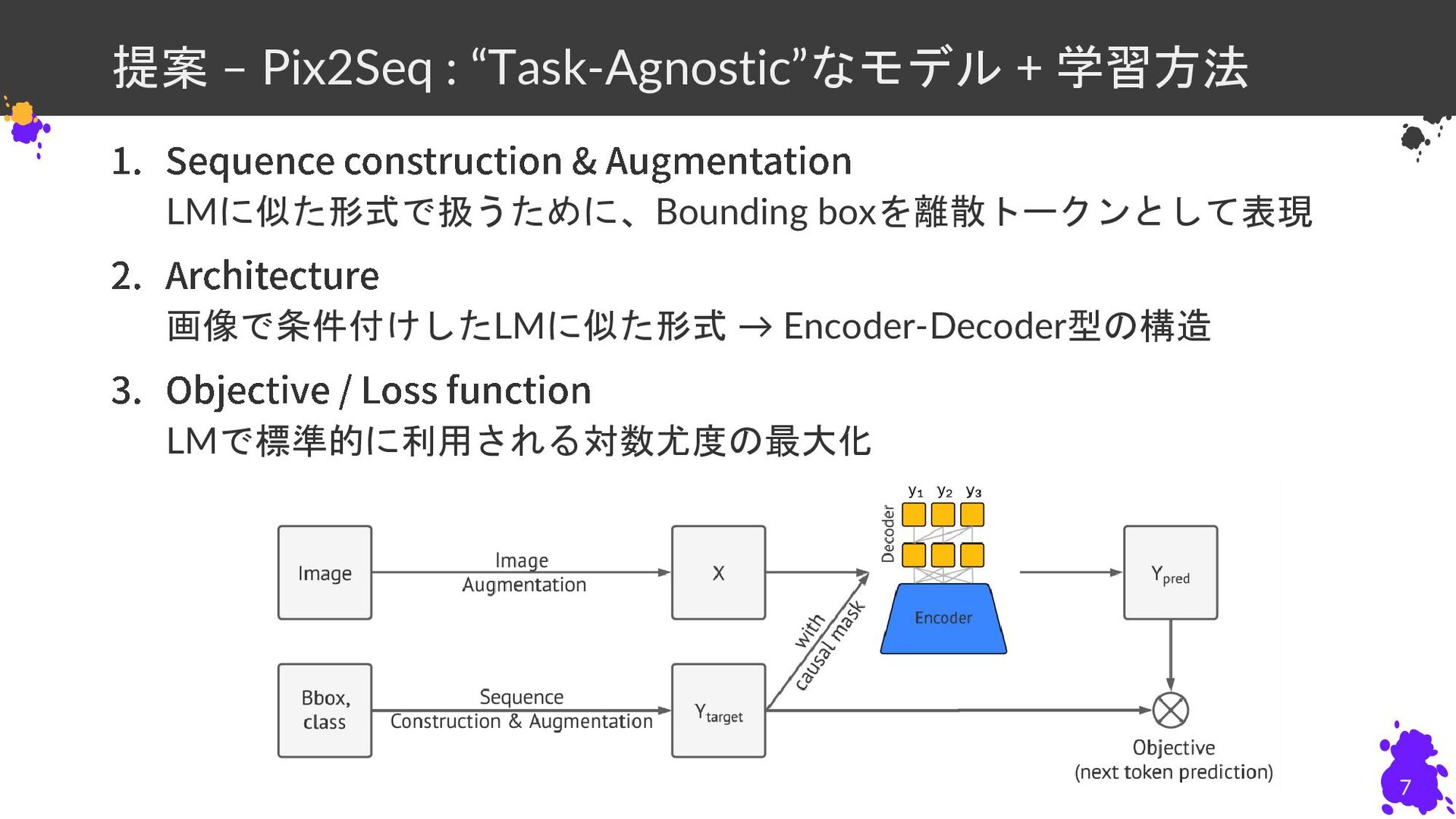
提案 – Pix2Seq : “Task-Agnostic”なモデル + 学習方法 LMに似た形式で扱うために、Bounding boxを離散トークンとして表現 画像で条件付けしたLMに似た形式
→ Encoder-Decoder型の構造 LMで標準的に利用される対数尤度の最大化 7
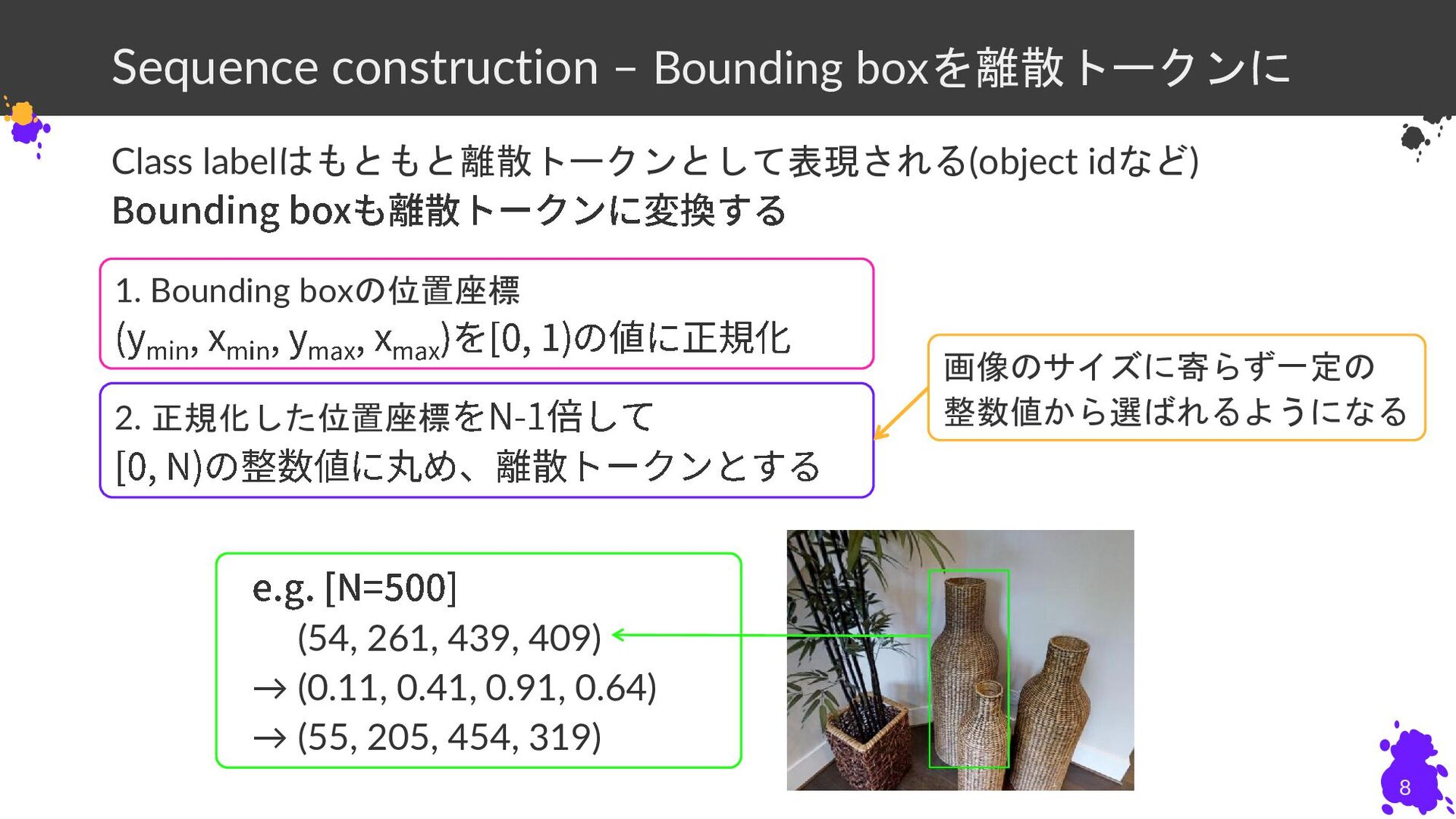
Sequence construction – Bounding boxを離散トークンに Class labelはもともと離散トークンとして表現される(object idなど) 8 1.
Bounding boxの位置座標 2. 正規化した位置座標 → (54, 261, 439, 409) → (0.11, 0.41, 0.91, 0.64) → (55, 205, 454, 319) 画像のサイズに寄らず一定の 整数値から選ばれるようになる
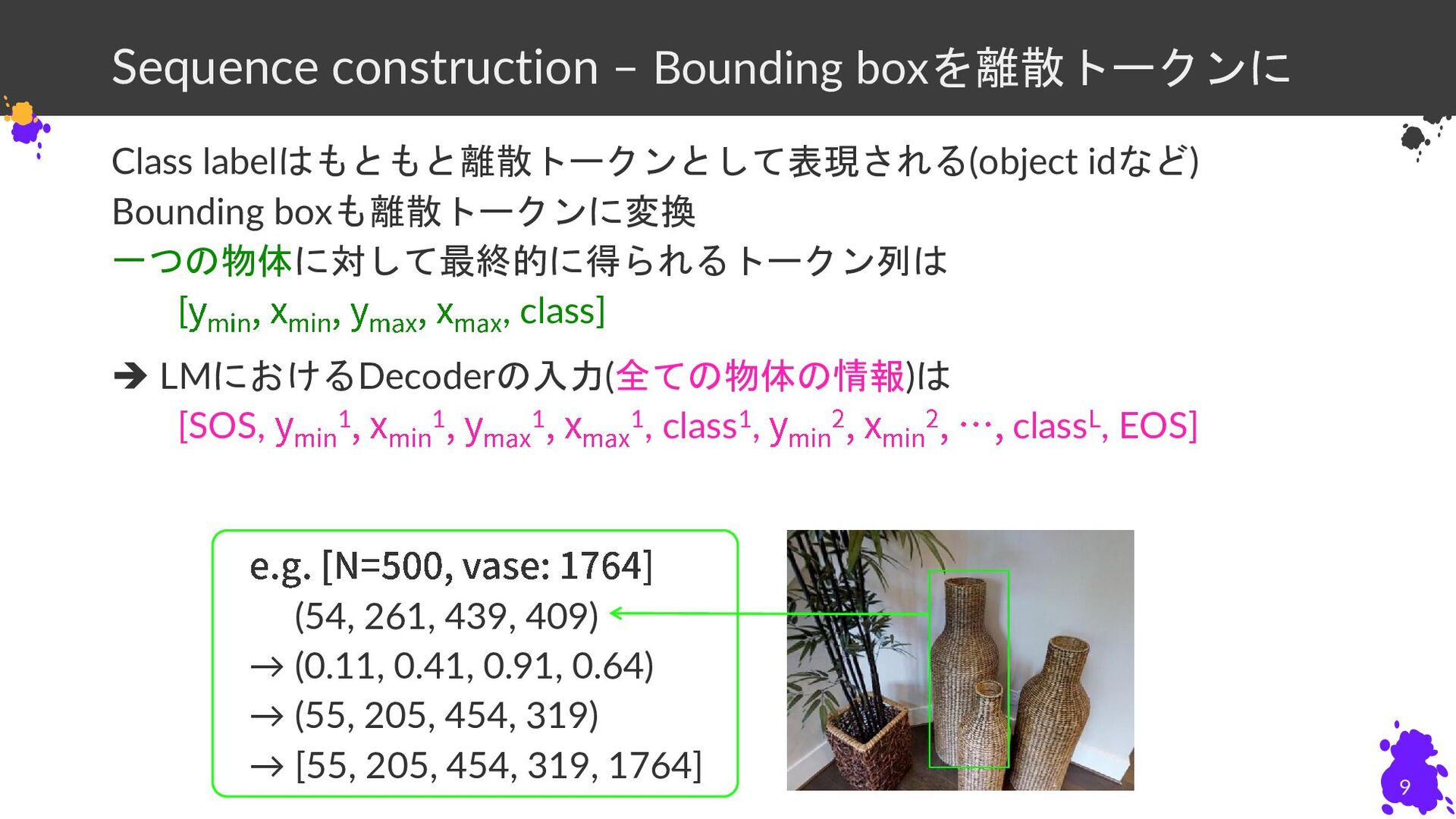
Sequence construction – Bounding boxを離散トークンに Class labelはもともと離散トークンとして表現される(object idなど) Bounding boxも離散トークンに変換
一つの物体に対して最終的に得られるトークン列は [ , class] ➔ LMにおけるDecoderの入力(全ての物体の情報)は [SOS, 1 1 1 1, class1, classL, EOS] 9 → (54, 261, 439, 409) → (0.11, 0.41, 0.91, 0.64) → (55, 205, 454, 319) → [55, 205, 454, 319, 1764]
Sequence augmentation – 検出漏れ+誤検出の低減 LMにおけるDecoderの入力は [ 1 1 1 1,
class1, classL, EOS] EOSが { 早く出る→検出漏れが増加 / 遅く出る→誤検出, 重複が増加} EOSを遅く(たくさん検出)し, かつ ➔ ??? 10
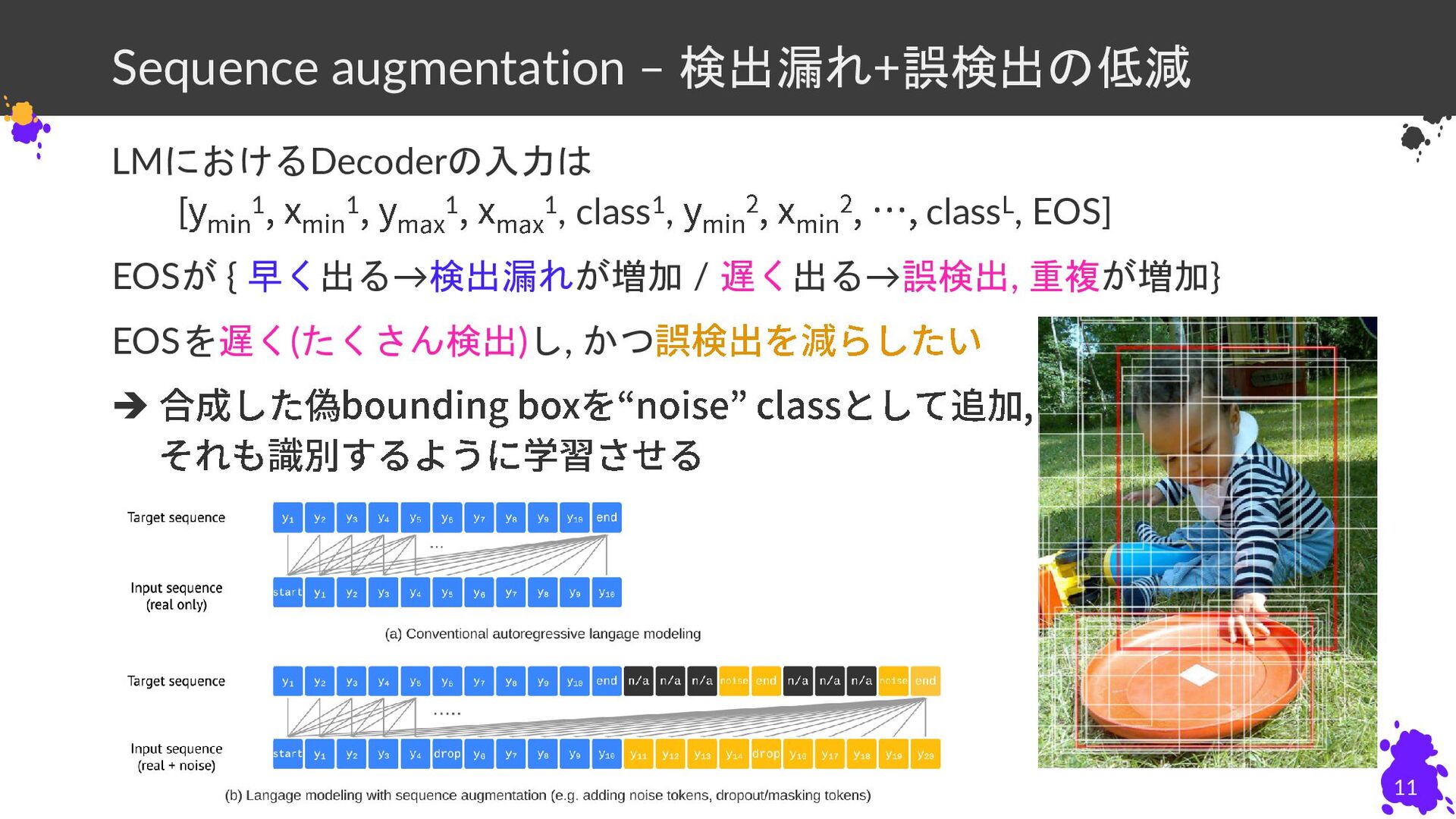
Sequence augmentation – 検出漏れ+誤検出の低減 LMにおけるDecoderの入力は [ 1 1 1 1,
class1, classL, EOS] EOSが { 早く出る→検出漏れが増加 / 遅く出る→誤検出, 重複が増加} EOSを遅く(たくさん検出)し, かつ ➔ ➔ 11
LMにおけるDecoderの入力は [ 1 1 1 1, class1, classL, EOS] EOSが
{ 早く出る→検出漏れが増加 / 遅く出る→誤検出, 重複が増加} EOSを遅く(たくさん検出)し, かつ ➔ ➔ Sequence augmentation – 検出漏れ+誤検出の低減 12 後半に偽bounding boxを追加 偽bounding boxに対する座標の予測はback prop.しない (どこからが偽物かは学習時は分かるので狙ってdetach可能)
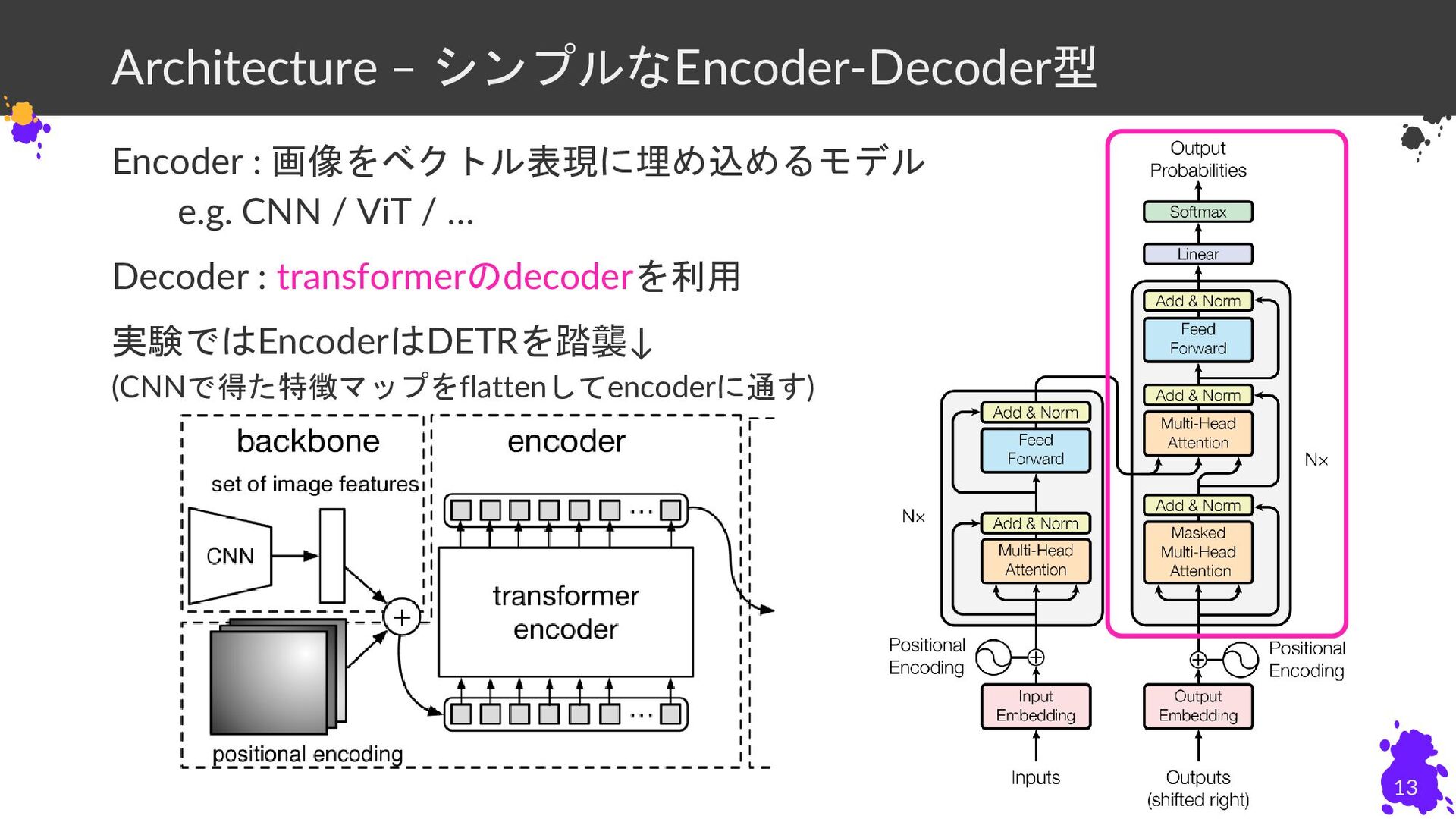
Architecture – シンプルなEncoder-Decoder型 Encoder : 画像をベクトル表現に埋め込めるモデル e.g. CNN / ViT
/ … Decoder : transformerのdecoderを利用 実験ではEncoderはDETRを踏襲↓ (CNNで得た特徴マップをflattenしてencoderに通す) 13
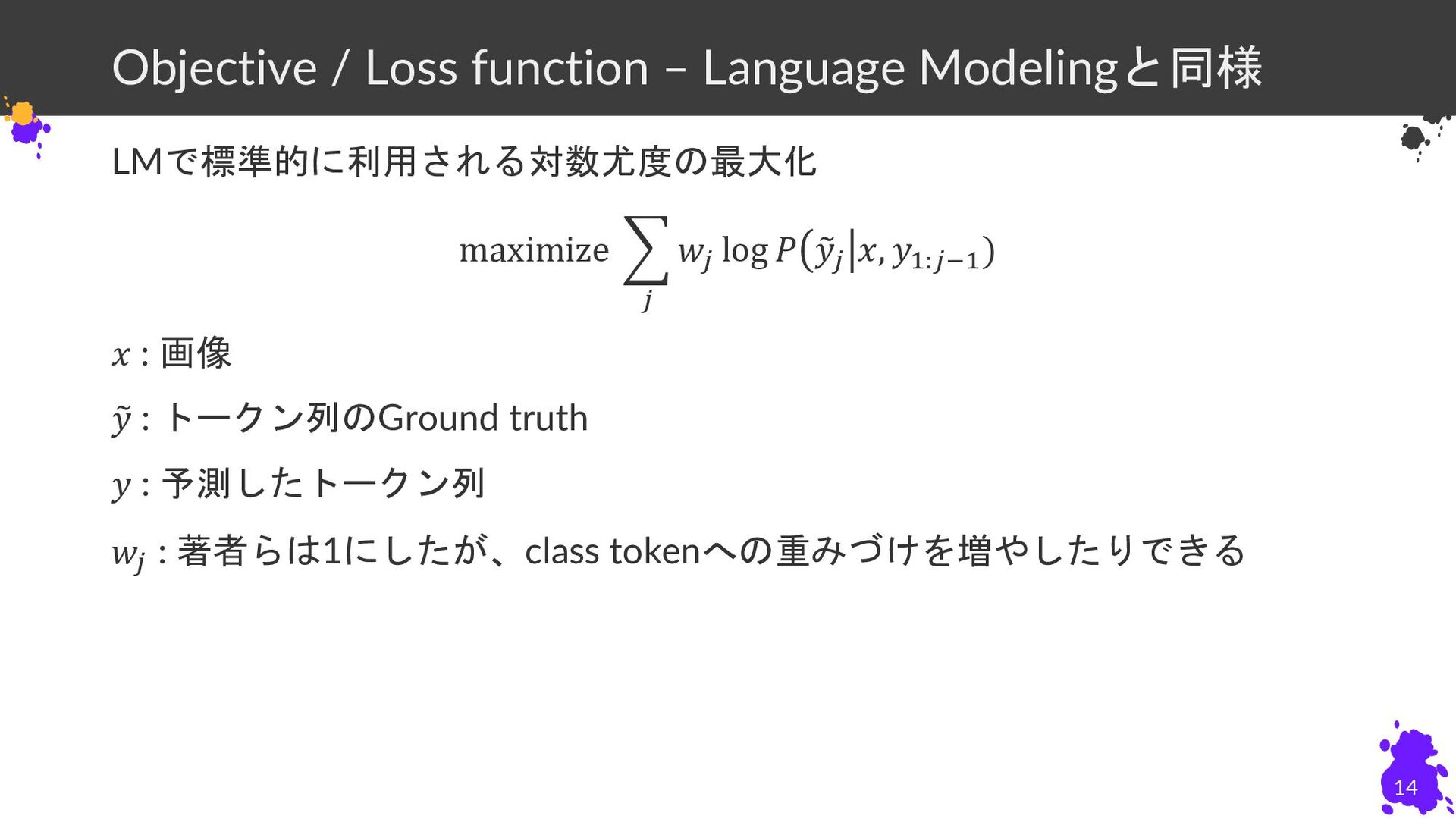
Objective / Loss function – Language Modelingと同様 LMで標準的に利用される対数尤度の最大化 maximize
𝑗 𝑤𝑗 log 𝑃 𝑦𝑗 𝑥, 𝑦1:𝑗−1 ) 𝑥 : 画像 𝑦 : トークン列のGround truth 𝑦 : 予測したトークン列 𝑤𝑗 : 著者らは1にしたが、class tokenへの重みづけを増やしたりできる 14
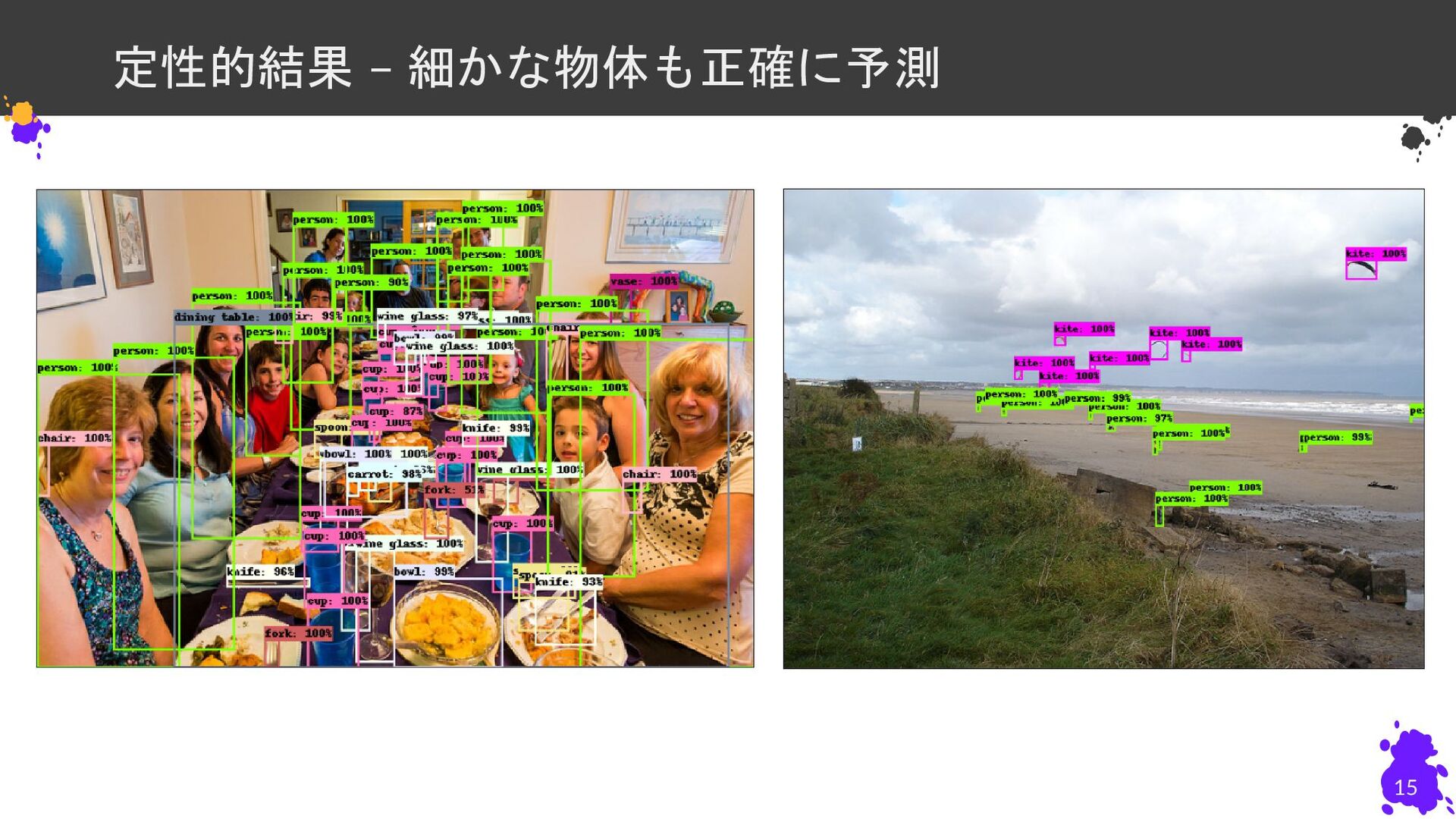
定性的結果 – 細かな物体も正確に予測 15
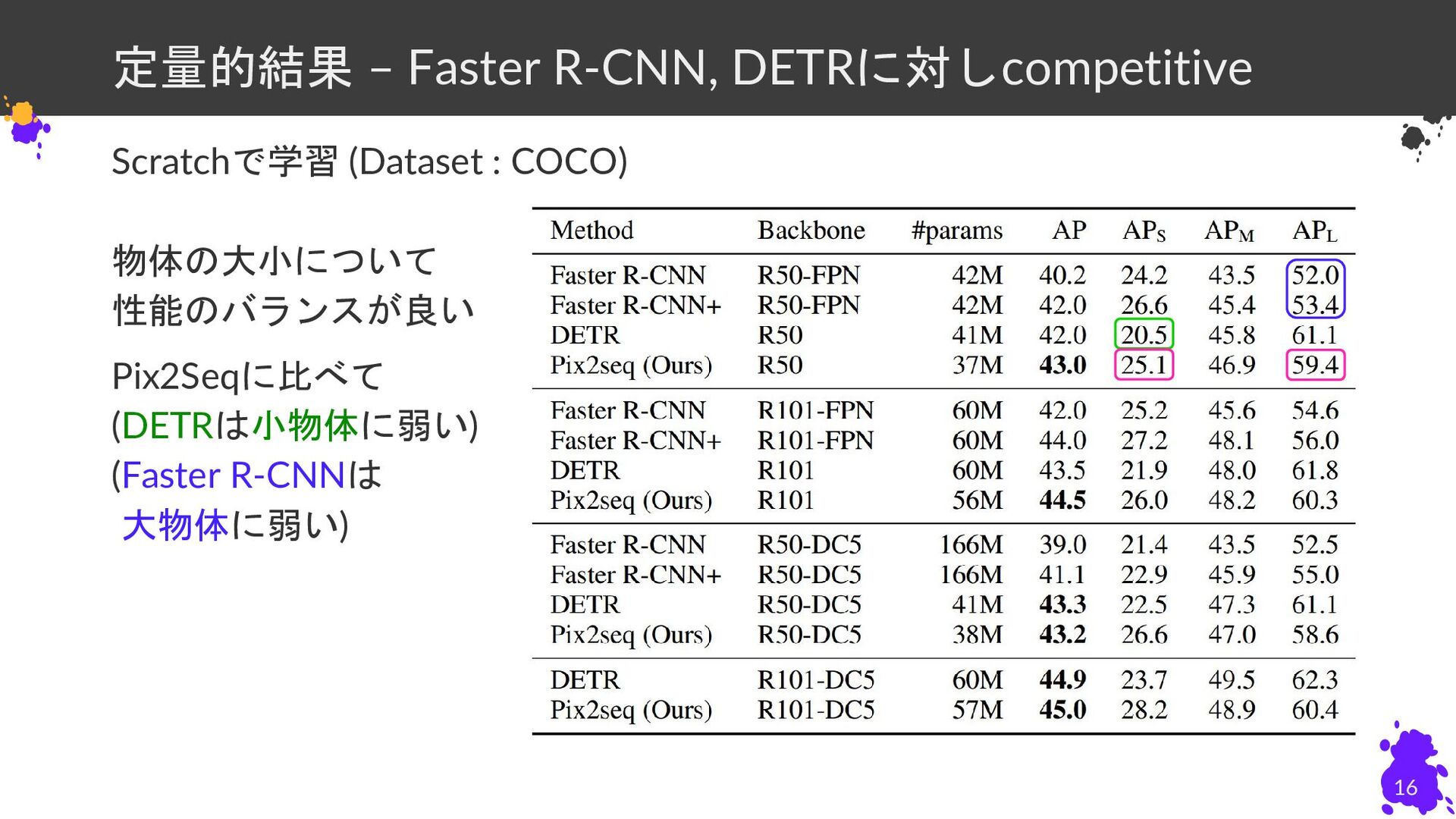
定量的結果 – Faster R-CNN, DETRに対しcompetitive Scratchで学習 (Dataset : COCO) 物体の大小について
性能のバランスが良い Pix2Seqに比べて (DETRは小物体に弱い) (Faster R-CNNは (大物体に弱い) 16
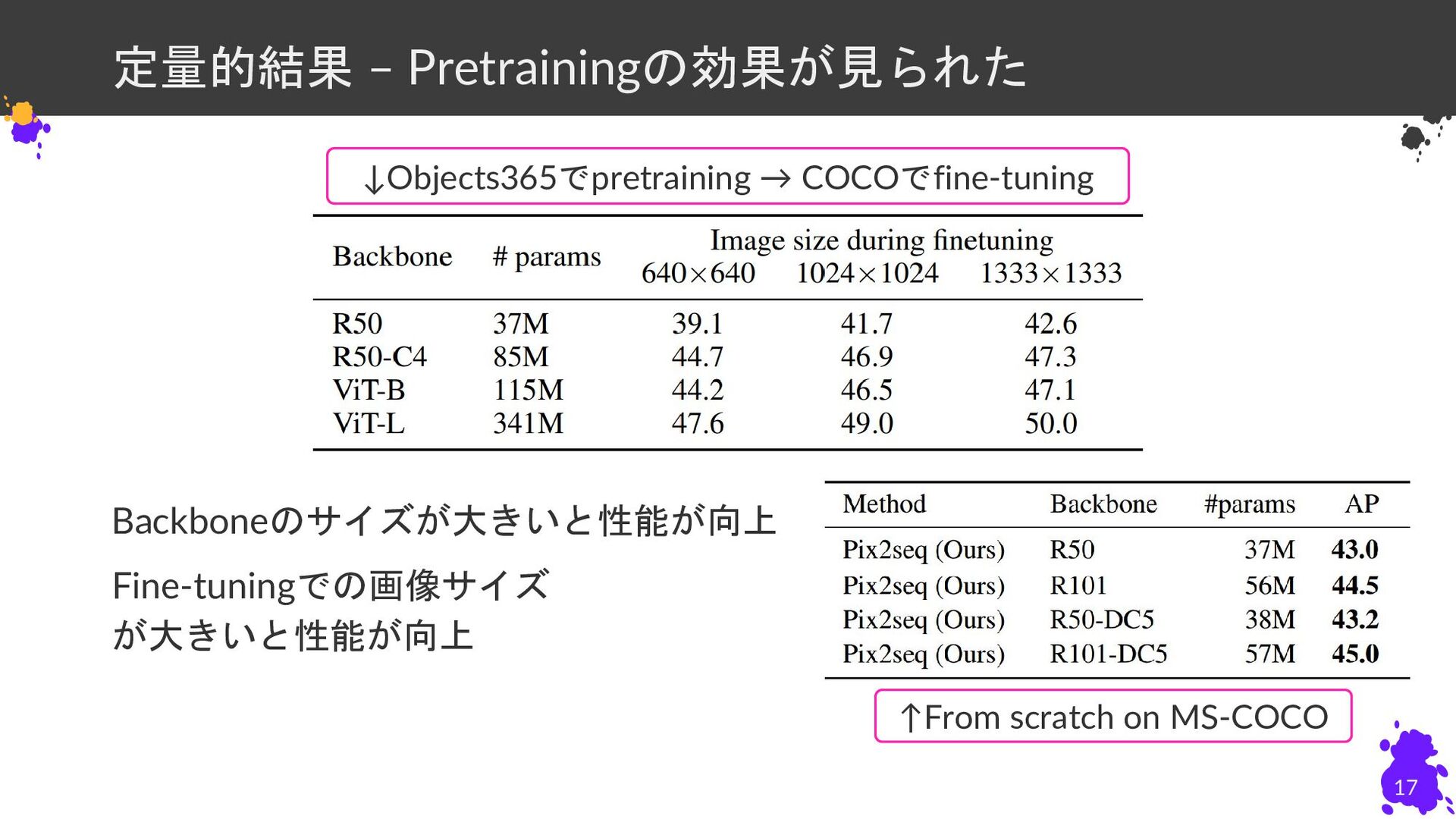
Backboneのサイズが大きいと性能が向上 Fine-tuningでの画像サイズ が大きいと性能が向上 定量的結果 – Pretrainingの効果が見られた 17 ↑From scratch on
MS-COCO ↓Objects365でpretraining → COCOでfine-tuning
まとめ – Pix2Seq 既存の物体検出モデルはタスクに特化した設定が多く為されていた ➔複雑な学習 / 汎用性の低下 物体検出を 入力画像で条件付けしたLanguage Modelingのような形で定式化
物体検出に特化した構造やengineeringを使用せず DETR, Faster R-CNNに対してcompetitiveな性能を達成 18
Appendix – Links • Paper (ICLR2022) • Discussion @OpenReview •
Official Implementation (TensorFlow) • Official Blog • Demo (Colab.) 19
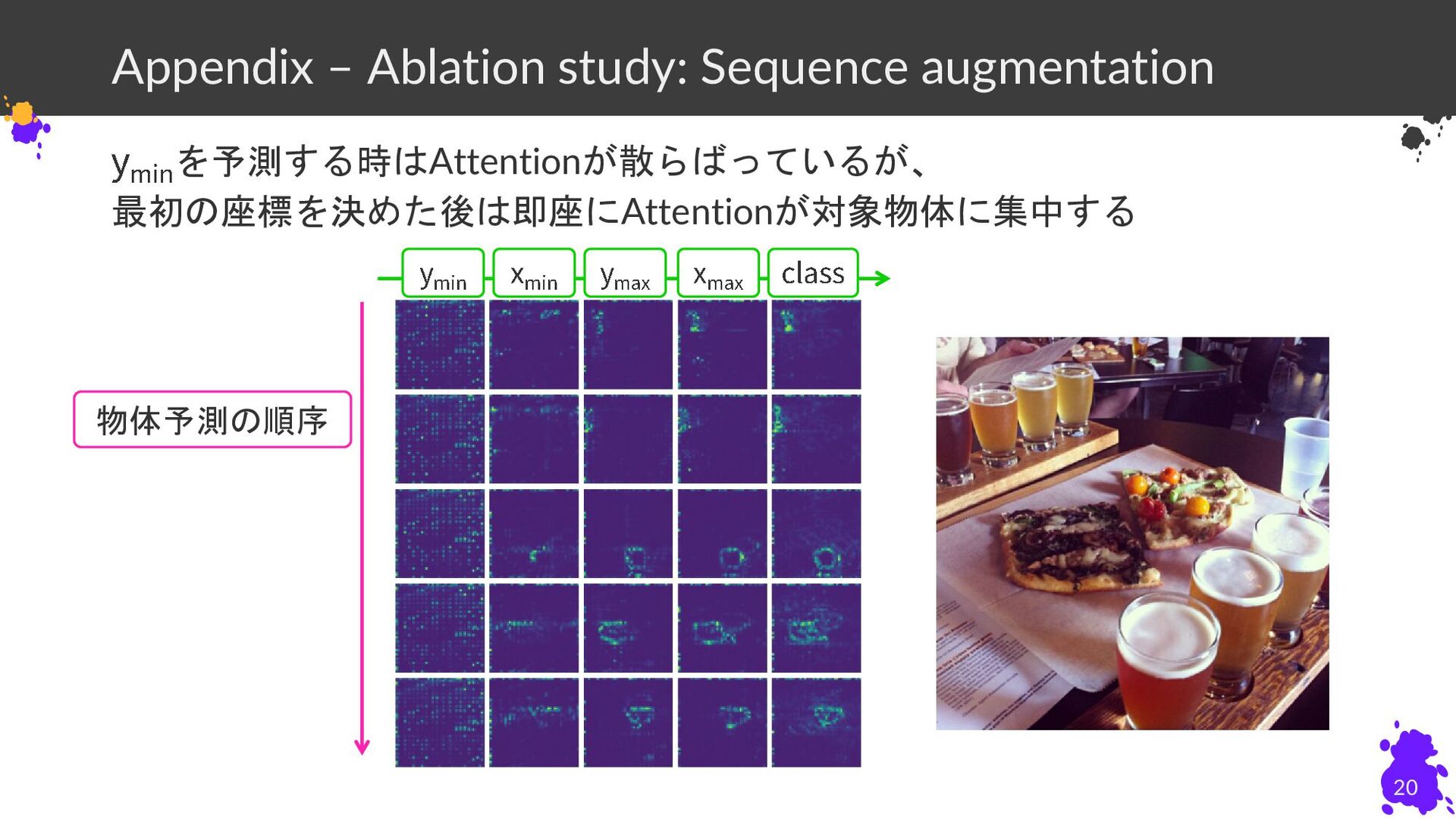
Appendix – Ablation study: Sequence augmentation 20 を予測する時はAttentionが散らばっているが、 最初の座標を決めた後は即座にAttentionが対象物体に集中する 物体予測の順序
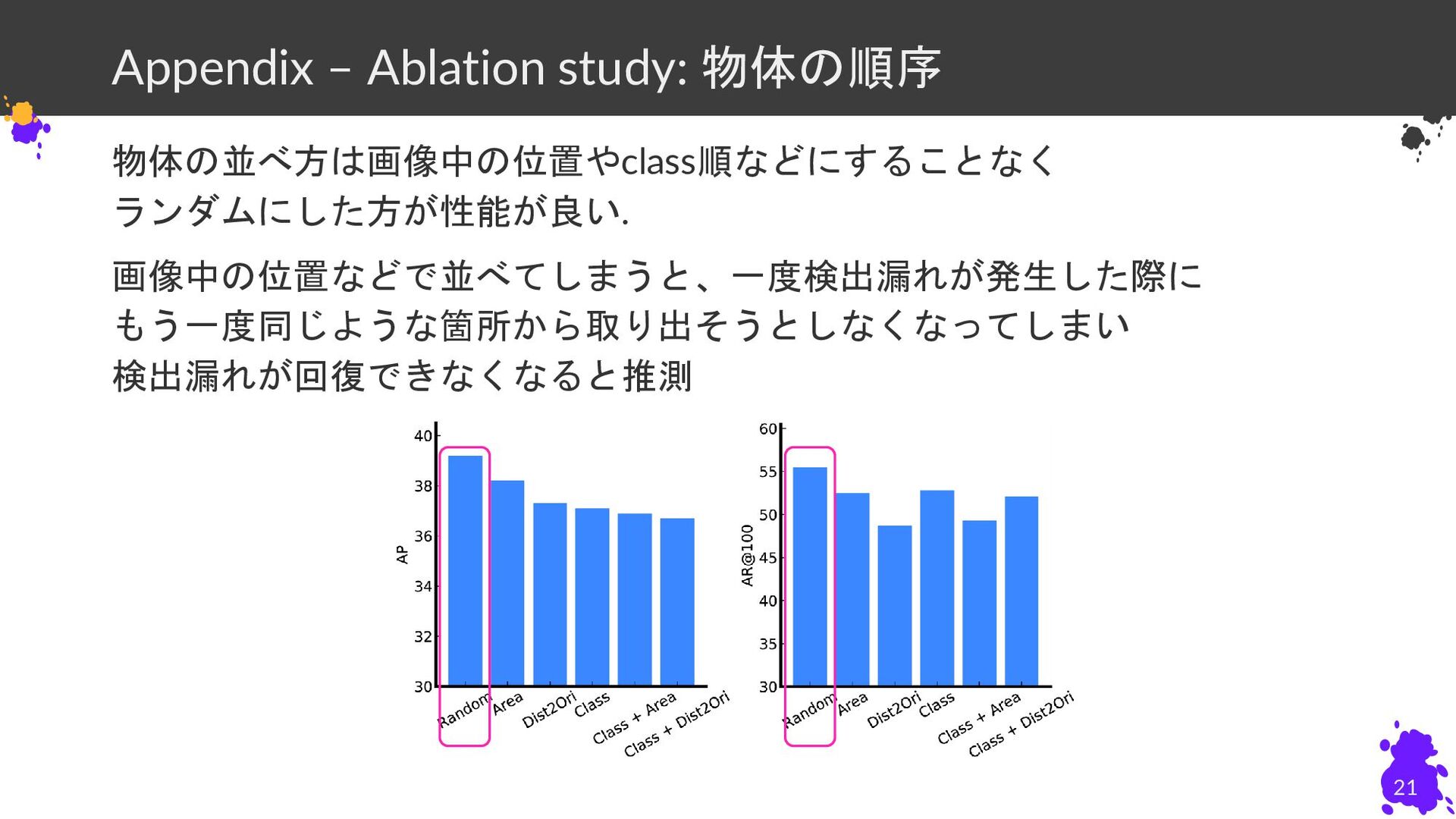
Appendix – Ablation study: 物体の順序 物体の並べ方は画像中の位置やclass順などにすることなく ランダムにした方が性能が良い. 画像中の位置などで並べてしまうと、一度検出漏れが発生した際に もう一度同じような箇所から取り出そうとしなくなってしまい 検出漏れが回復できなくなると推測
21
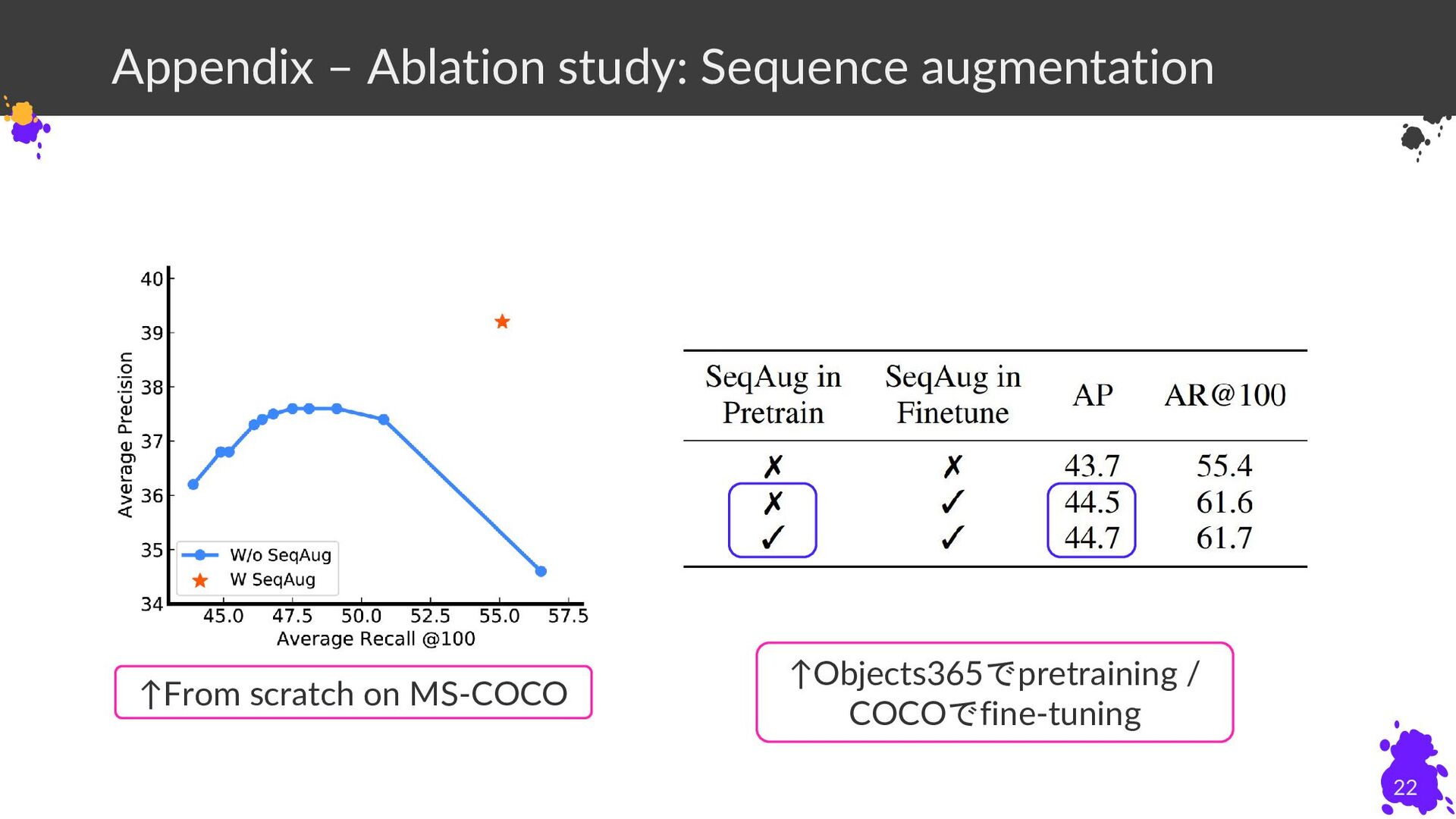
Appendix – Ablation study: Sequence augmentation 22 ↑From scratch on
MS-COCO ↑Objects365でpretraining / COCOでfine-tuning
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![関連研究 – 既存の物体検出モデルは “Task-Specific” 5 Faster R-CNN [Ren+, NeurIPS15] •](https://files.speakerdeck.com/presentations/54fd84c3d14546f599494f96bbde39a9/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![LMにおけるDecoderの入力は [ 1 1 1 1, class1, classL, EOS] EOSが](https://files.speakerdeck.com/presentations/54fd84c3d14546f599494f96bbde39a9/slide_11.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}