Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[RSJ25] Feasible RAG: Hierarchical Multimodal R...
Search
Sponsored
·
Ship Features Fearlessly
Turn features on and off without deploys. Used by thousands of Ruby developers.
→
Semantic Machine Intelligence Lab., Keio Univ.
PRO
September 02, 2025
Technology
260
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[RSJ25] Feasible RAG: Hierarchical Multimodal Retrieval with Feasibility-Aware Embodied Memory for Mobile Manipulation
Semantic Machine Intelligence Lab., Keio Univ.
PRO
September 02, 2025
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
81
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
86
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
98
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
Other Decks in Technology
See All in Technology
書籍セキュアAPIについて
riiimparm
0
180
現場との対話から始める “作る前に問い直す”業務改善
mochico50
1
210
“それは自分の仕事じゃない"を 越えて行け
yuukiyo
1
520
AIコード生成×サプライチェーン攻撃 — PHPが直面する“二重の信頼問題
shinyasaita
0
450
探索・可視化・自動化を一本化 Amazon Quickでデータ活用スピードを上げる方法
koheiyoshikawa
0
170
Amazon Quick 入門!
ysuzuki
2
130
Network Firewallやっていき!
news_it_enj
0
260
CDKで書くECSのベストプラクティス、 改めて考え直す2026 #cdkconf2026
makies
3
930
第67回コンピュータビジョン勉強会CVPR2026読会前編
tsukamotokenji
0
160
Devsumi 2026 Summer 人もAIも使える共通基盤を事業の加速装置にする~デザインシステム運用に学ぶ組織レバレッジ~ 渡辺 凌央
legalontechnologies
PRO
1
280
SoccerMaster: A Vision Foundation Model for Soccer Understanding
kzykmyzw
0
160
なぜ、あなたのエージェントは言うことを聞かないのか
segavvy
1
350
Featured
See All Featured
brightonSEO & MeasureFest 2025 - Christian Goodrich - Winning strategies for Black Friday CRO & PPC
cargoodrich
3
750
Templates, Plugins, & Blocks: Oh My! Creating the theme that thinks of everything
marktimemedia
31
2.8k
Principles of Awesome APIs and How to Build Them.
keavy
128
18k
Designing Powerful Visuals for Engaging Learning
tmiket
1
460
Improving Core Web Vitals using Speculation Rules API
sergeychernyshev
21
1.5k
Navigating Weather and Climate Data
rabernat
0
400
RailsConf & Balkan Ruby 2019: The Past, Present, and Future of Rails at GitHub
eileencodes
141
35k
The Illustrated Guide to Node.js - THAT Conference 2024
reverentgeek
1
410
Applied NLP in the Age of Generative AI
inesmontani
PRO
4
2.4k
Sharpening the Axe: The Primacy of Toolmaking
bcantrill
46
2.9k
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
470
Visualization
eitanlees
152
17k
Transcript
是方諒介1,2,3,Quanting Xie3,Yonatan Bisk3,杉浦孔明1,2 1慶應義塾大学,2慶應AIセンター,3Carnegie Mellon University 行動実現性を考慮した 階層型マルチモーダル検索に基づく 移動マニピュレーション
背景:Open-Vocabulary Mobile Manipulation (OVMM) ▪ OVMM [Yenamandra+, CoRL/NeurIPS23], [Liu+, 24]
▪ 自然言語指示に基づく物体操作 → 実世界検索 [Yashima+, RA-L25], [Kaneda+, RA-L/IROS24] ▪ 家庭や公共空間において言語で物体検索が可能 ▪ Motivation:行動実現性がより高い物体の特定 → 成功率向上に寄与 - 2 - ドライバの横にあるペンを 持ってきてください 既存手法は「視覚・言語的に」 正しい物体か否かのみを考慮
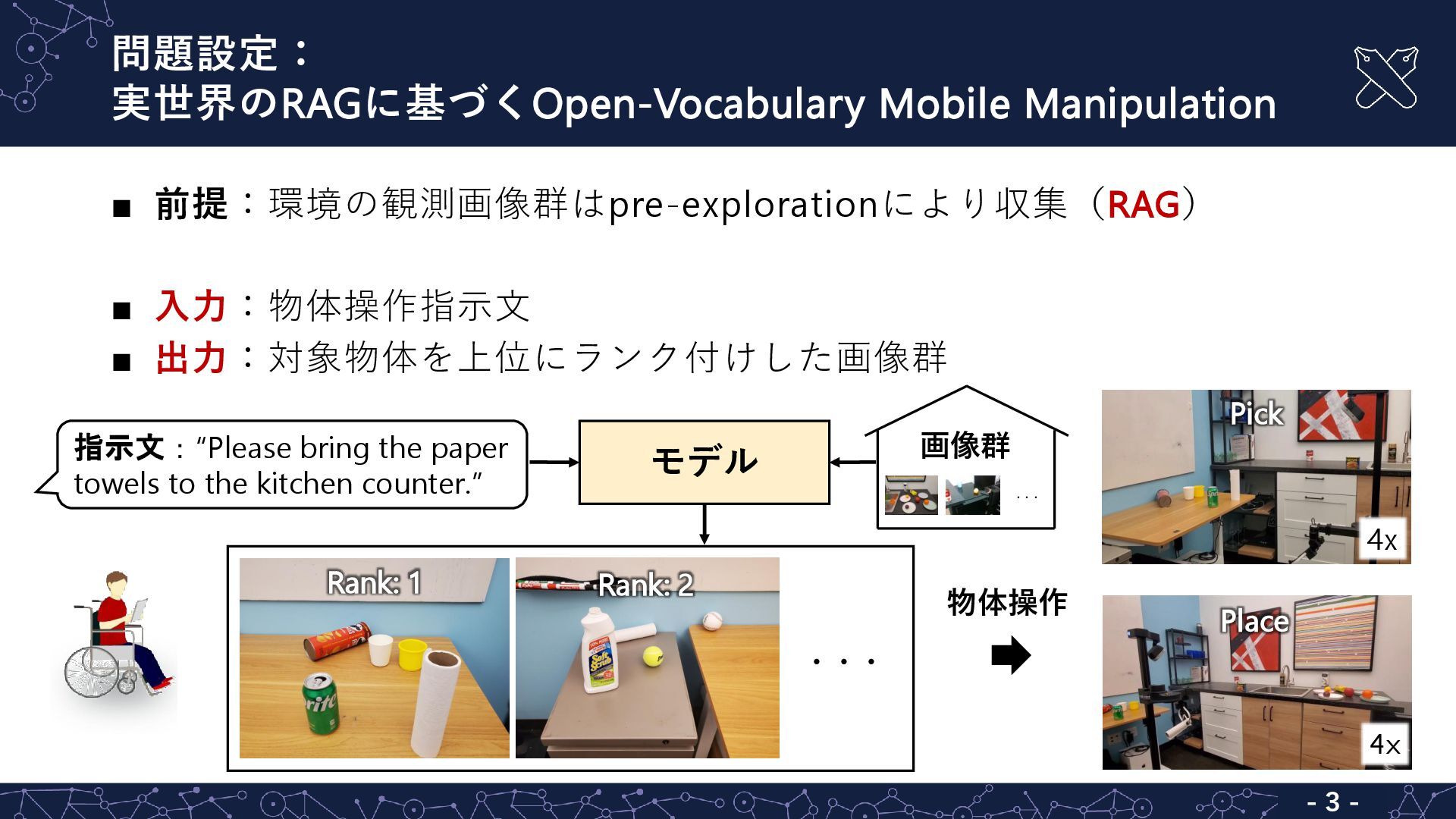
問題設定: 実世界のRAGに基づくOpen-Vocabulary Mobile Manipulation - 3 - ▪ 前提:環境の観測画像群はpre-explorationにより収集(RAG) ▪
入力:物体操作指示文 ▪ 出力:対象物体を上位にランク付けした画像群 4x 4x ・・・ モデル ・・・ 画像群 指示文:“Please bring the paper towels to the kitchen counter.” Rank: 1 Rank: 2 Pick Place 物体操作
関連研究:行動実現性の考慮は不十分 - 4 - マルチモーダル検索に 基づく移動・物体操作 NLMap [Chen+, ICRA23], MultiRankIt
[Kaneda+, RA-L/IROS24], RREx-BoT [Sigurdsson+, IROS23], RelaX-Former [Yashima+, RA-L25] 大規模画像・テキスト対 で訓練された基盤モデル CLIP [Radford+, ICML21], Long-CLIP [Zhang+, ECCV24], SigLIP [Zhai+, ICCV23], BLIP-2 [Li+, ICML23], BEiT-3 [Wang+, CVPR23] グラフ構造に基づく 実世界環境の表現 Embodied-RAG [Xie+, 24], MoMa-LLM [Honerkamp+, RA-L24], ConceptGraphs [Gu+, ICRA24], HOV-SG [Werby+, RSS24] RelaX-Former Embodied-RAG
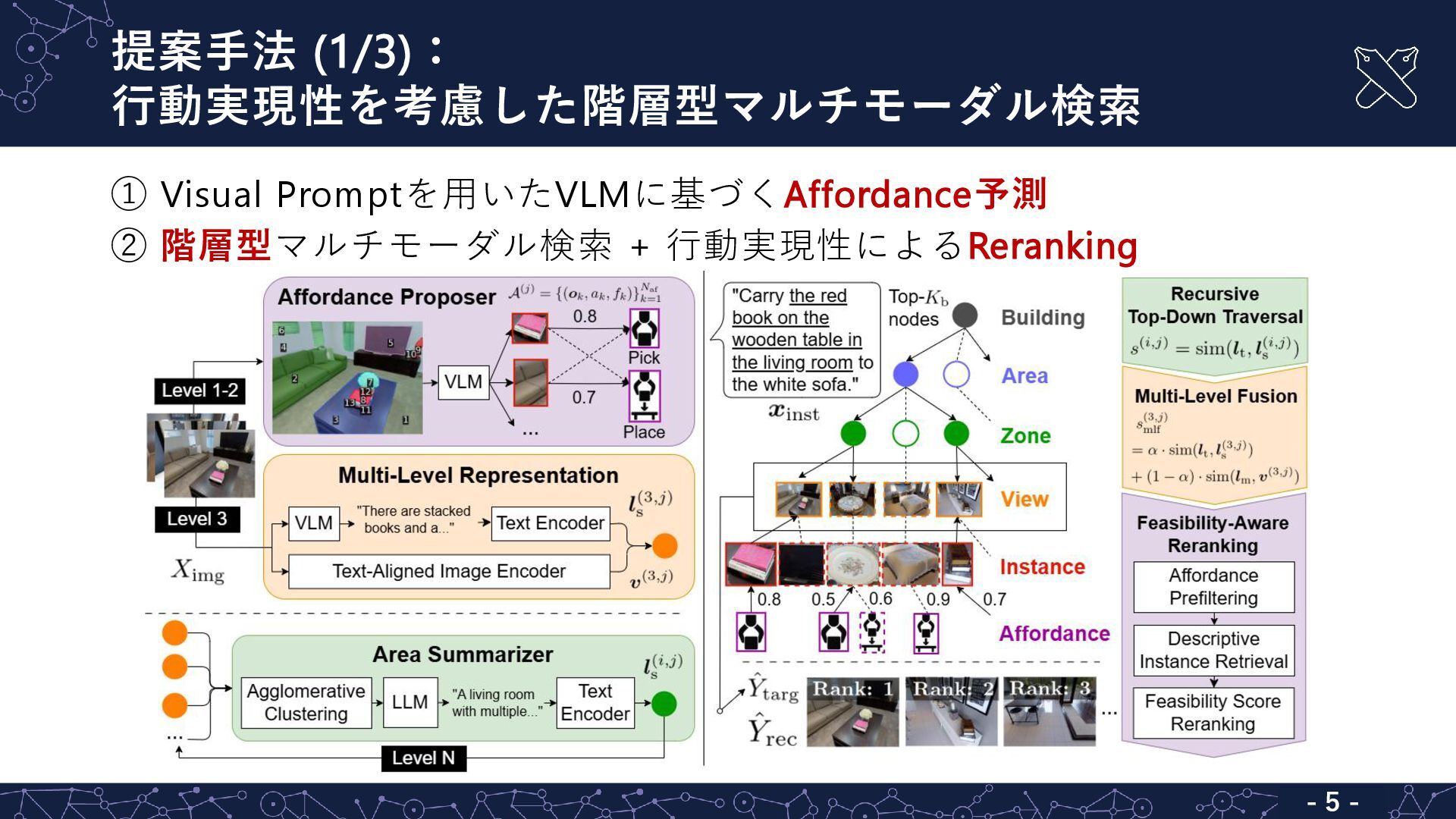
提案手法 (1/3): 行動実現性を考慮した階層型マルチモーダル検索 - 5 - ① Visual Promptを用いたVLMに基づくAffordance予測 ②
階層型マルチモーダル検索 + 行動実現性によるReranking
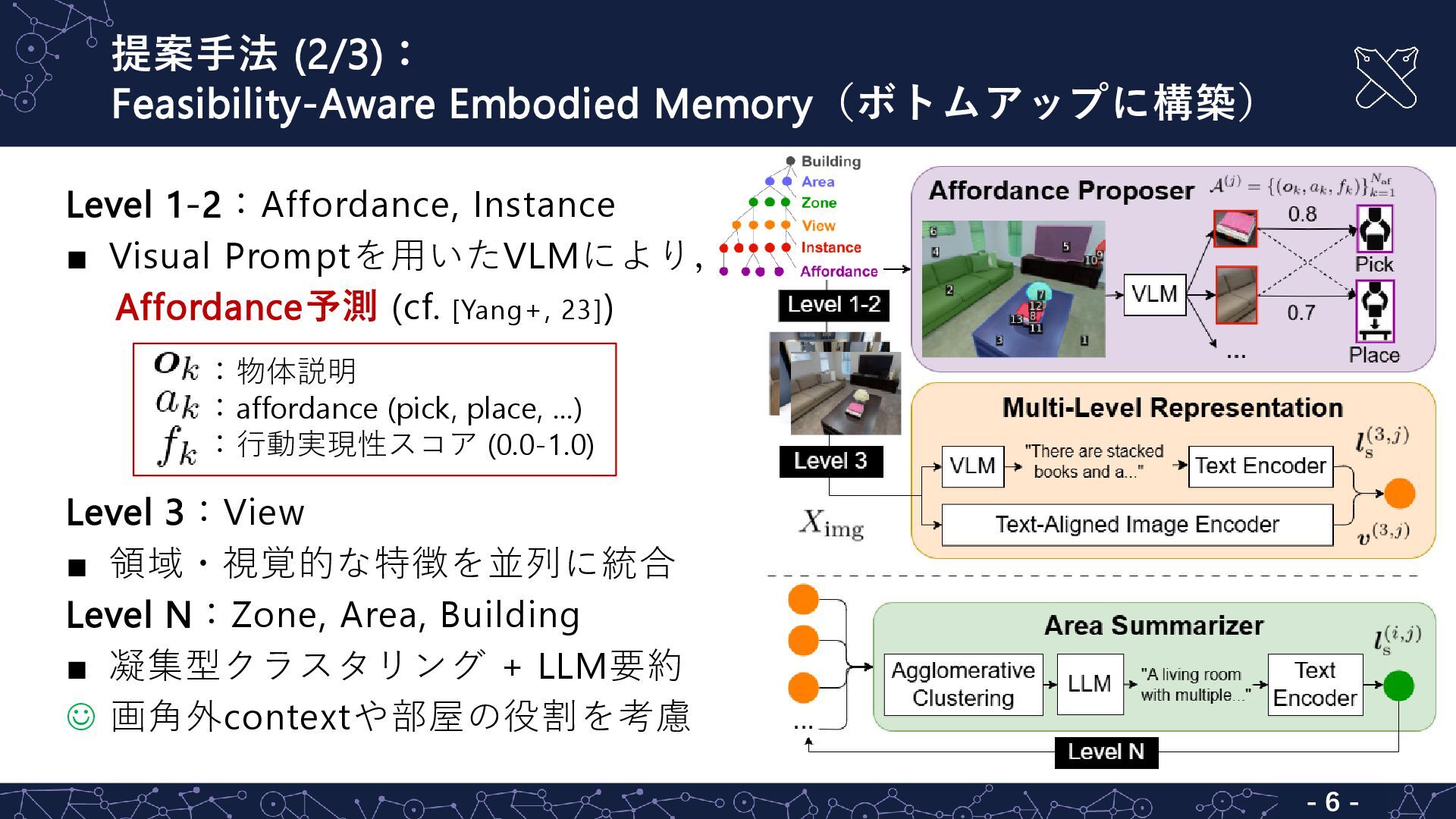
提案手法 (2/3): Feasibility-Aware Embodied Memory(ボトムアップに構築) - 6 - Level 1-2:Affordance,
Instance ▪ Visual Promptを用いたVLMにより, Affordance予測 (cf. [Yang+, 23]) Level 3:View ▪ 領域・視覚的な特徴を並列に統合 Level N:Zone, Area, Building ▪ 凝集型クラスタリング + LLM要約 ☺ 画角外contextや部屋の役割を考慮 :物体説明 :affordance (pick, place, …) :行動実現性スコア (0.0-1.0)
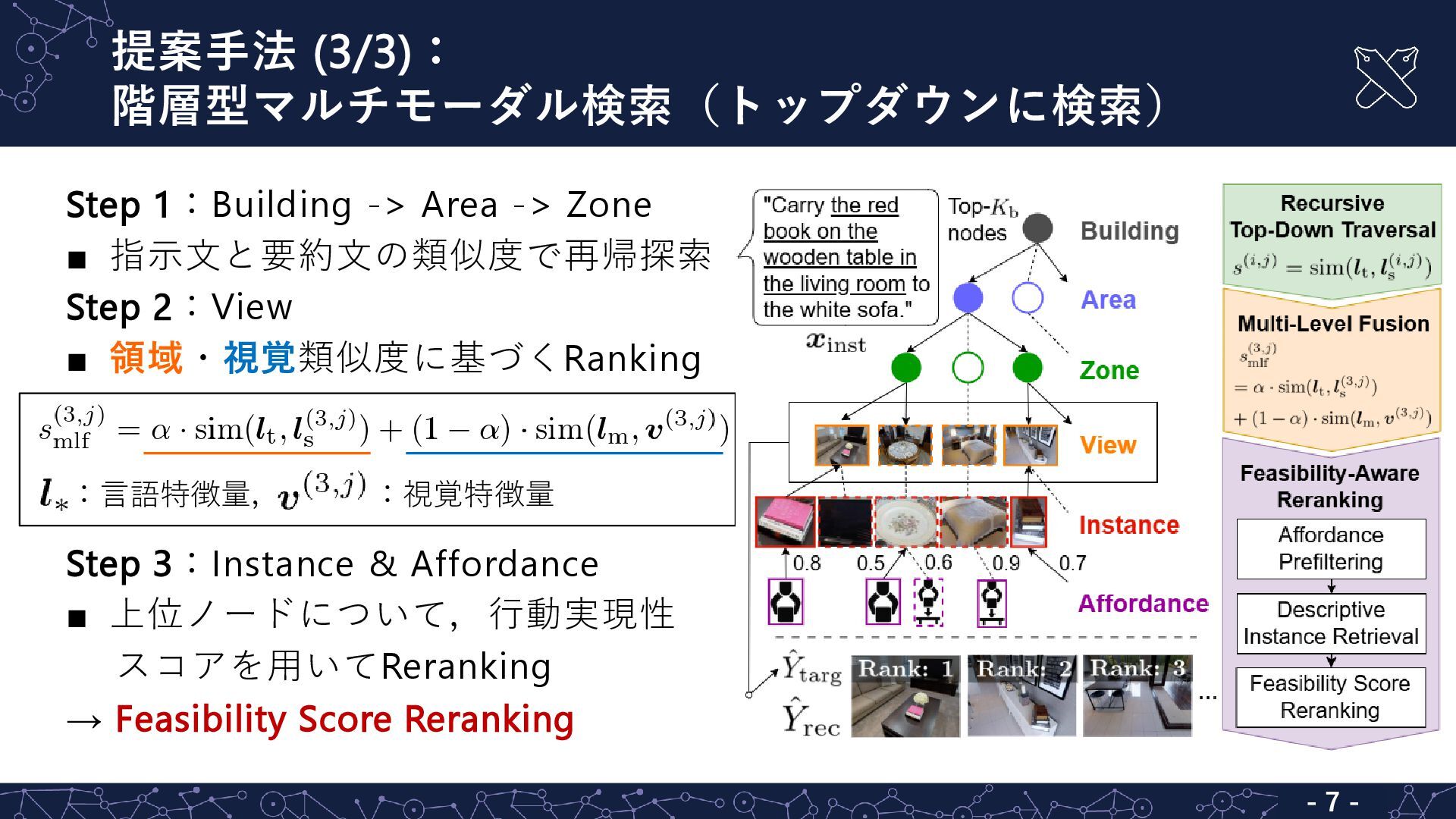
:言語特徴量, :視覚特徴量 提案手法 (3/3): 階層型マルチモーダル検索(トップダウンに検索) - 7 - Step 1:Building
-> Area -> Zone ▪ 指示文と要約文の類似度で再帰探索 Step 2:View ▪ 領域・視覚類似度に基づくRanking Step 3:Instance & Affordance ▪ 上位ノードについて,行動実現性 スコアを用いてReranking → Feasibility Score Reranking
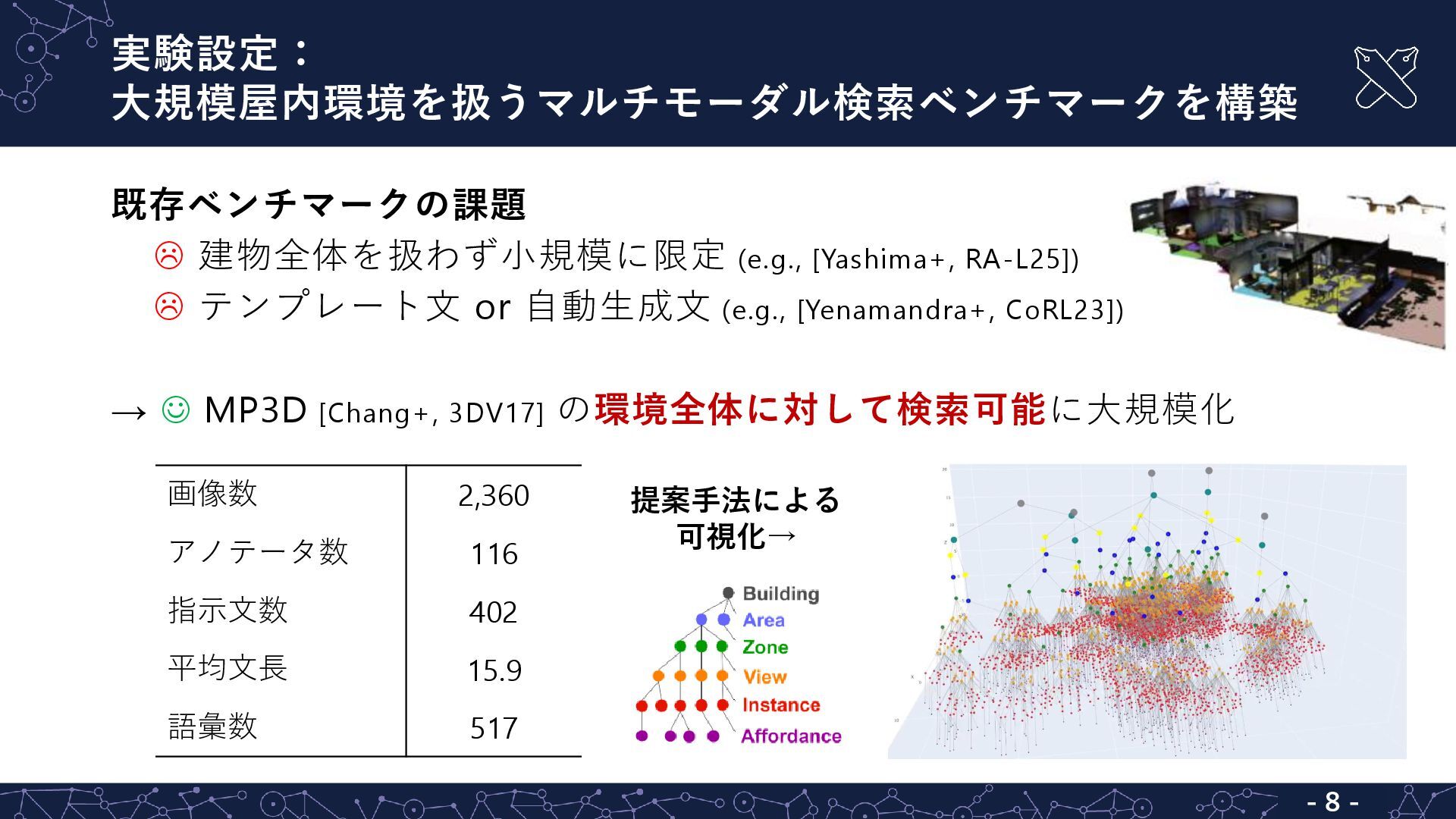
実験設定: 大規模屋内環境を扱うマルチモーダル検索ベンチマークを構築 - 8 - 既存ベンチマークの課題 建物全体を扱わず小規模に限定 (e.g., [Yashima+,
RA-L25]) テンプレート文 or 自動生成文 (e.g., [Yenamandra+, CoRL23]) → ☺ MP3D [Chang+, 3DV17] の環境全体に対して検索可能に大規模化 画像数 2,360 アノテータ数 116 指示文数 402 平均文長 15.9 語彙数 517 提案手法による 可視化→
定量的結果: 対象物体・配置目標ともにベースライン手法を上回る検索性能 [%] 手法 対象物体 配置目標 全体 R@10↑ R@20↑ R@10↑
R@20↑ R@10↑ R@20↑ 提案手法 49.9 61.7 24.3 30.2 37.1 45.9 NLMap* [Chen+, ICRA23] 19.2 30.4 15.1 23.6 17.2 27.0 BEiT-3 [Wang+, CVPR23] 42.1 53.8 15.4 27.6 28.7 40.7 HomeRobot* [Yenamandra+, CoRL23] 10.2 12.9 3.9 8.4 7.0 10.7 SigLIP [Zhai+, ICCV23] 34.5 47.3 11.0 22.4 22.7 34.8 Embodied-RAG [Xie+, 24] 18.5 22.8 11.3 14.4 14.9 18.6 MM-Embed [Lin+, ICLR25] 24.4 36.8 11.6 22.3 18.0 29.5 - 9 - +7.8 +8.9 +8.4 評価指標:Recall@K (R@K)
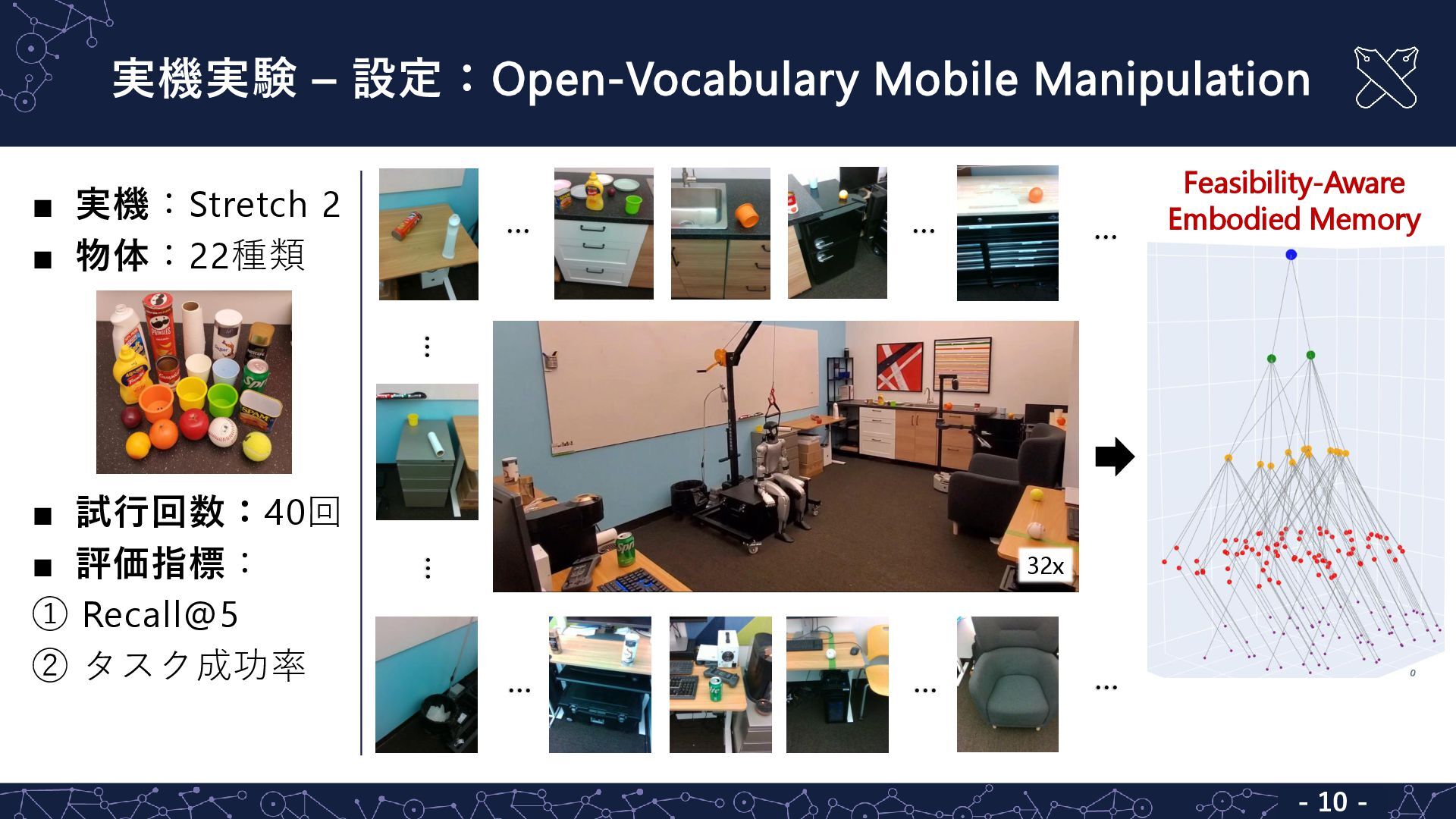
実機実験 – 設定:Open-Vocabulary Mobile Manipulation - 10 - ▪ 実機:Stretch
2 ▪ 物体:22種類 ▪ 試行回数:40回 ▪ 評価指標: ① Recall@5 ② タスク成功率 … 32x … … … … … … … Feasibility-Aware Embodied Memory
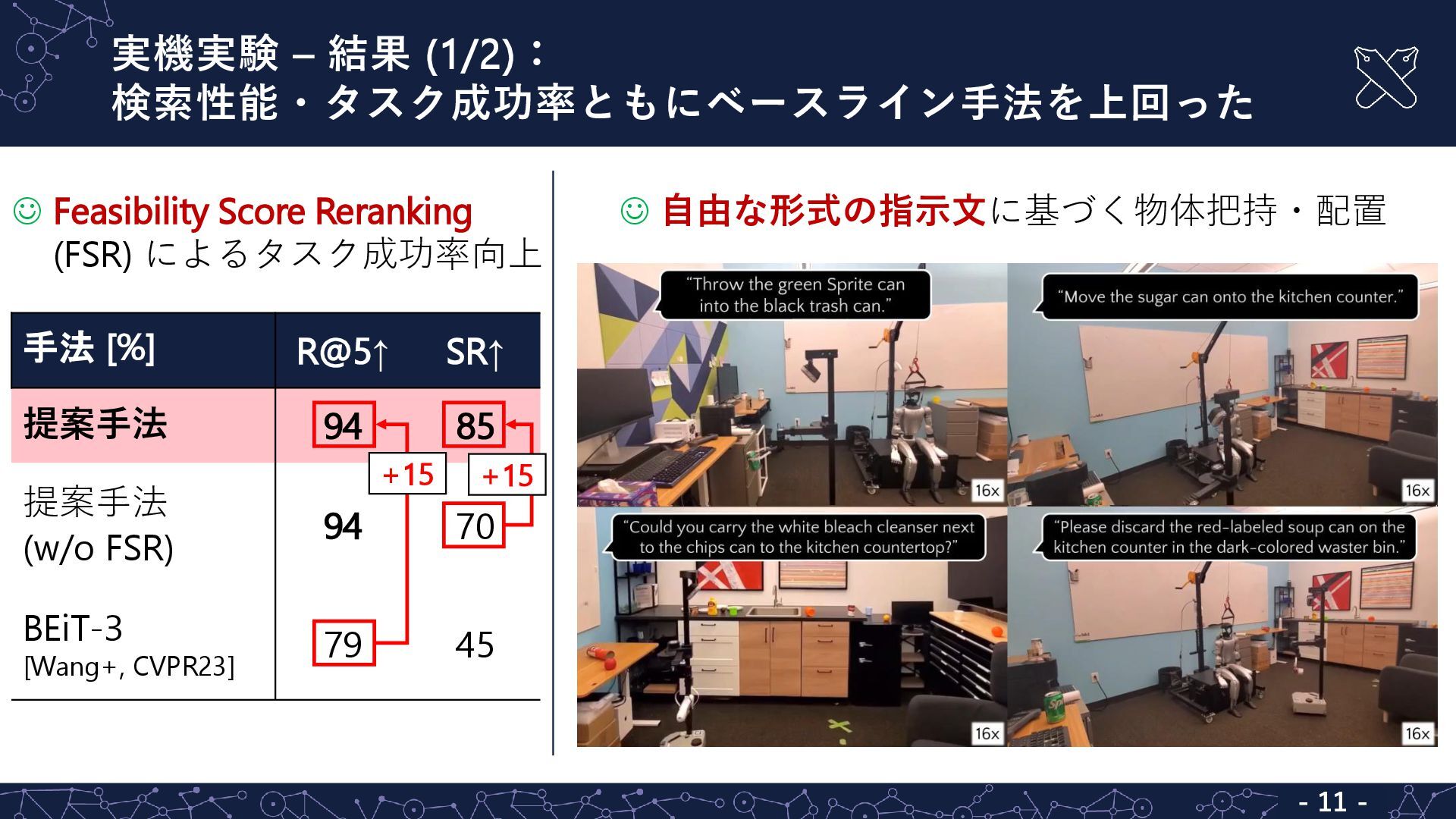
実機実験 – 結果 (1/2): 検索性能・タスク成功率ともにベースライン手法を上回った - 11 - ☺ 自由な形式の指示文に基づく物体把持・配置
手法 [%] R@5↑ SR↑ 提案手法 94 85 提案手法 (w/o FSR) 94 70 BEiT-3 [Wang+, CVPR23] 79 45 ☺ Feasibility Score Reranking (FSR) によるタスク成功率向上 +15 +15
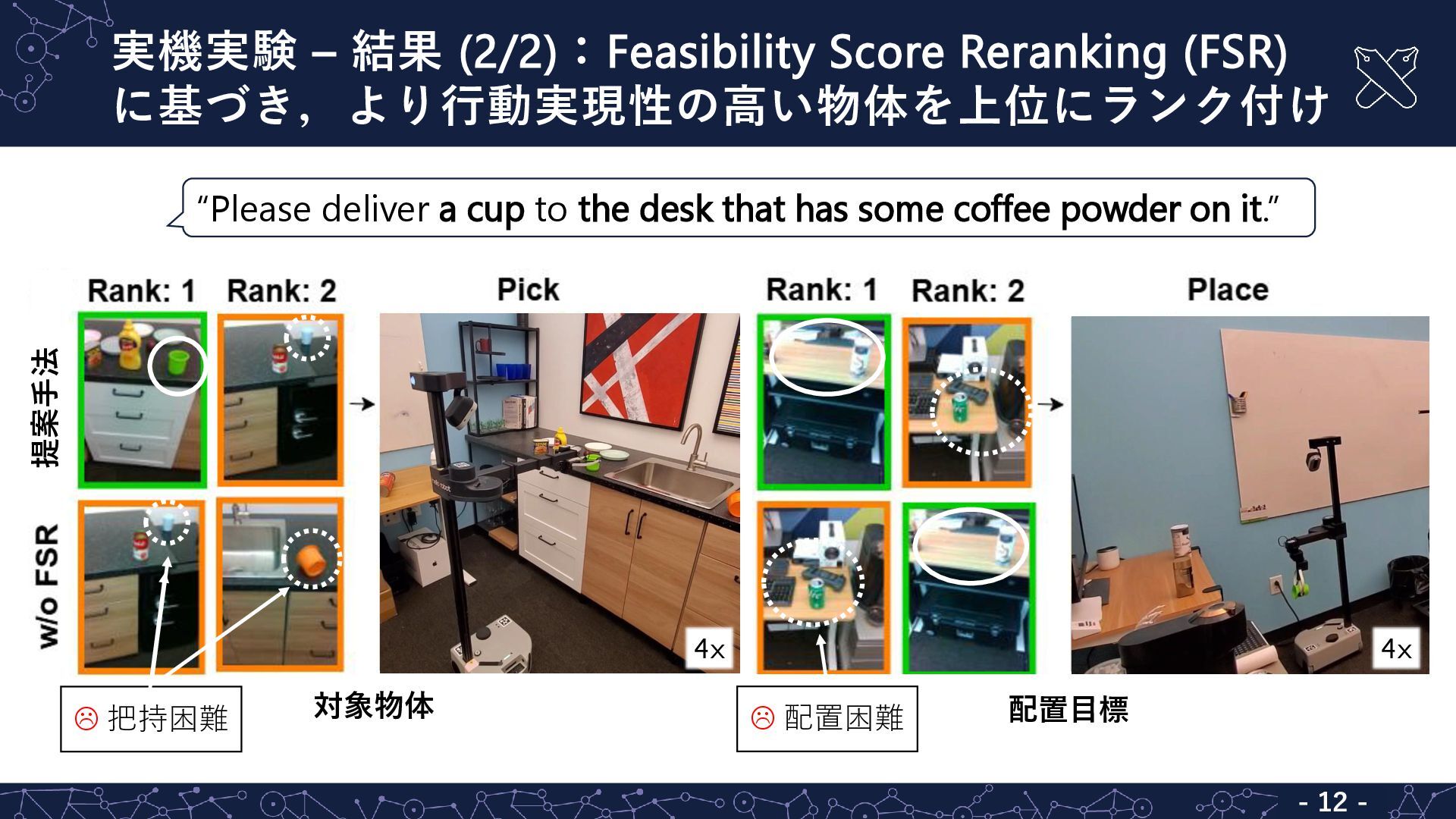
実機実験 – 結果 (2/2):Feasibility Score Reranking (FSR) に基づき,より行動実現性の高い物体を上位にランク付け - 12
- 4x 4x 対象物体 配置目標 提案手法 “Please deliver a cup to the desk that has some coffee powder on it.” 配置困難 把持困難
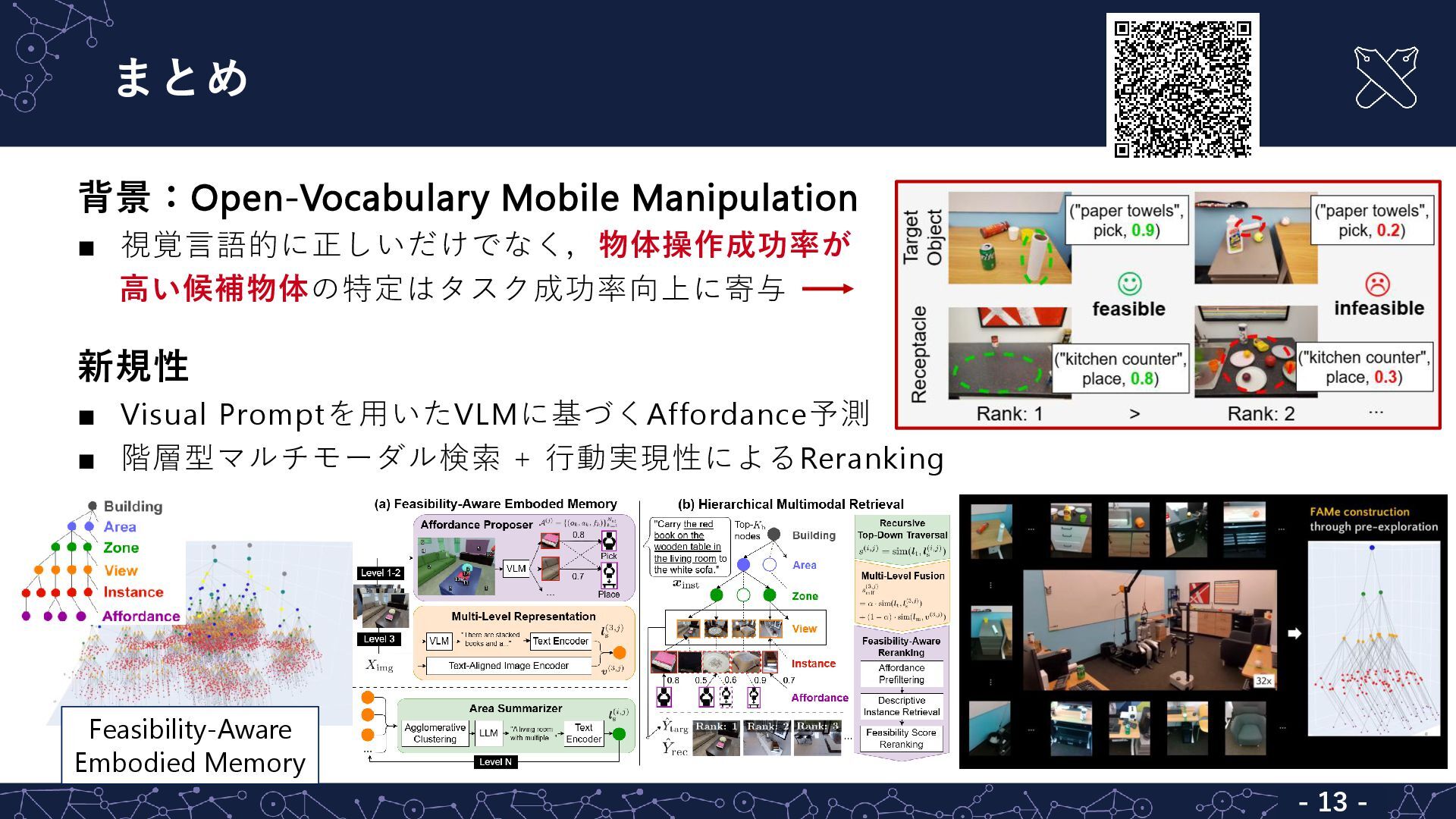
背景:Open-Vocabulary Mobile Manipulation ▪ 視覚言語的に正しいだけでなく,物体操作成功率が 高い候補物体の特定はタスク成功率向上に寄与 新規性 ▪ Visual Promptを用いたVLMに基づくAffordance予測
▪ 階層型マルチモーダル検索 + 行動実現性によるReranking Feasibility-Aware Embodied Memory まとめ - 13 -
Appendix
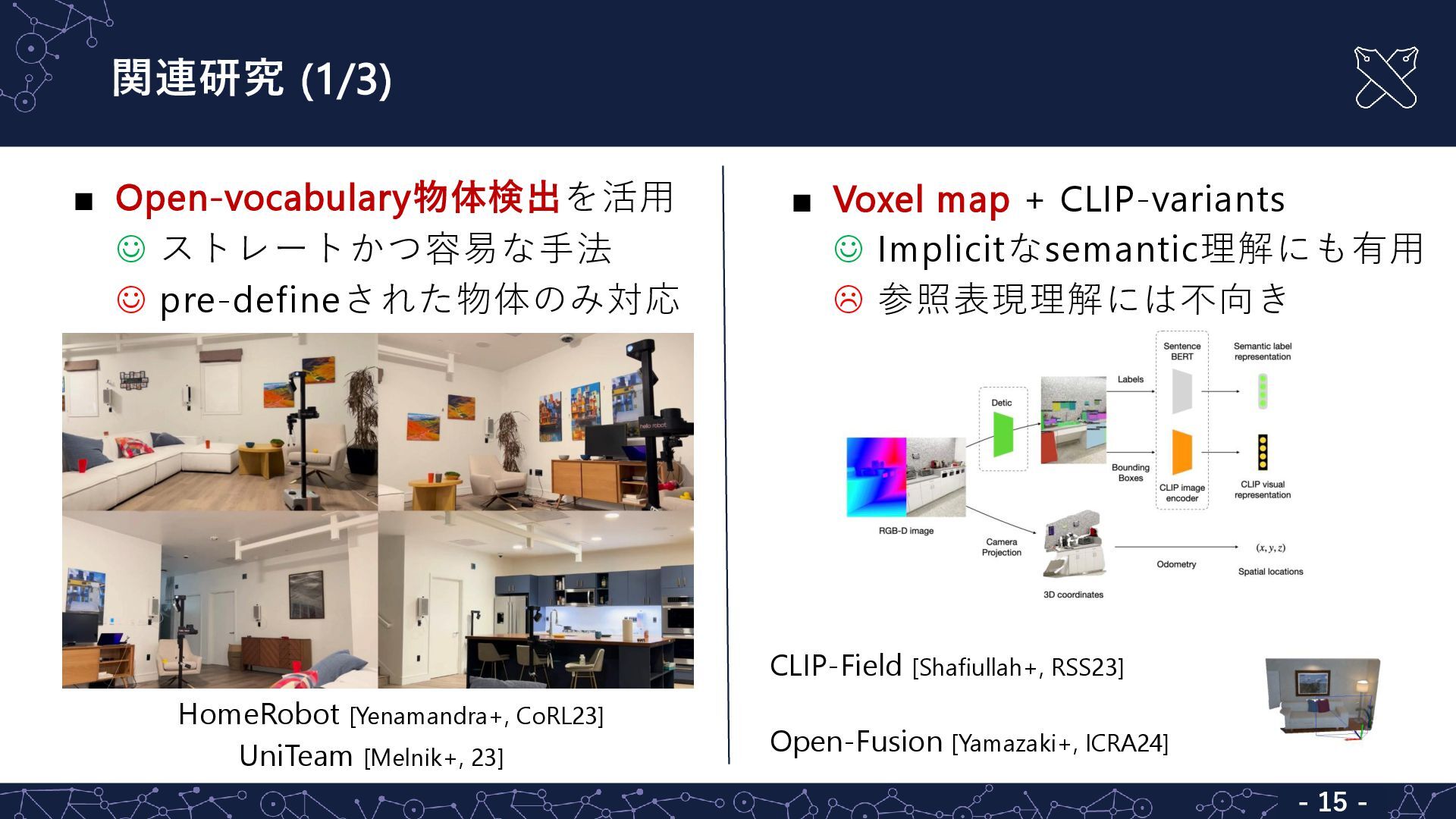
関連研究 (1/3) ▪ Open-vocabulary物体検出を活用 ☺ ストレートかつ容易な手法 ☺ pre-defineされた物体のみ対応 ▪ Voxel
map + CLIP-variants ☺ Implicitなsemantic理解にも有用 参照表現理解には不向き HomeRobot [Yenamandra+, CoRL23] UniTeam [Melnik+, 23] Open-Fusion [Yamazaki+, ICRA24] CLIP-Field [Shafiullah+, RSS23] - 15 -
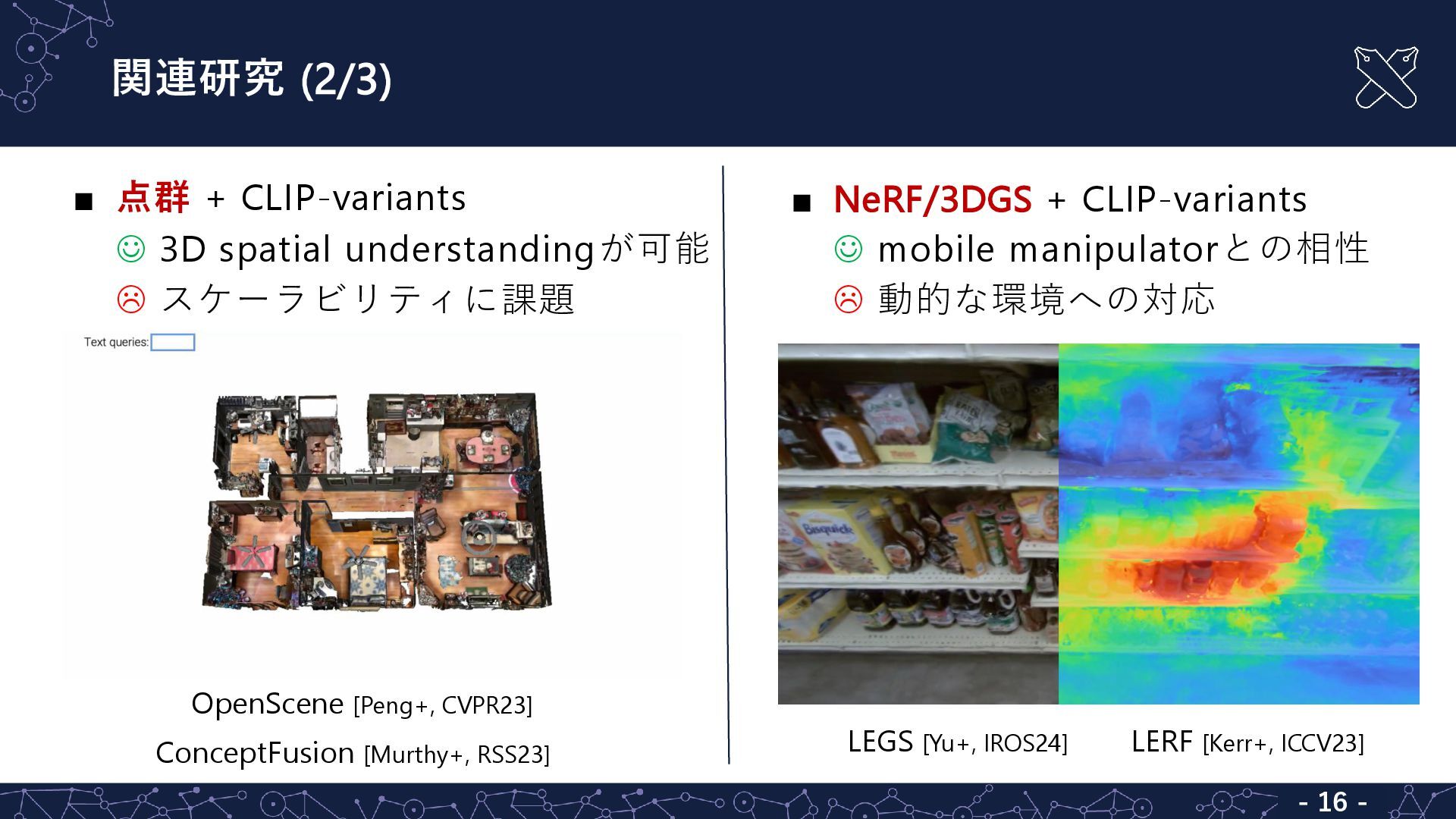
関連研究 (2/3) ▪ 点群 + CLIP-variants ☺ 3D spatial understandingが可能
スケーラビリティに課題 ▪ NeRF/3DGS + CLIP-variants ☺ mobile manipulatorとの相性 動的な環境への対応 LERF [Kerr+, ICCV23] LEGS [Yu+, IROS24] OpenScene [Peng+, CVPR23] ConceptFusion [Murthy+, RSS23] - 16 -
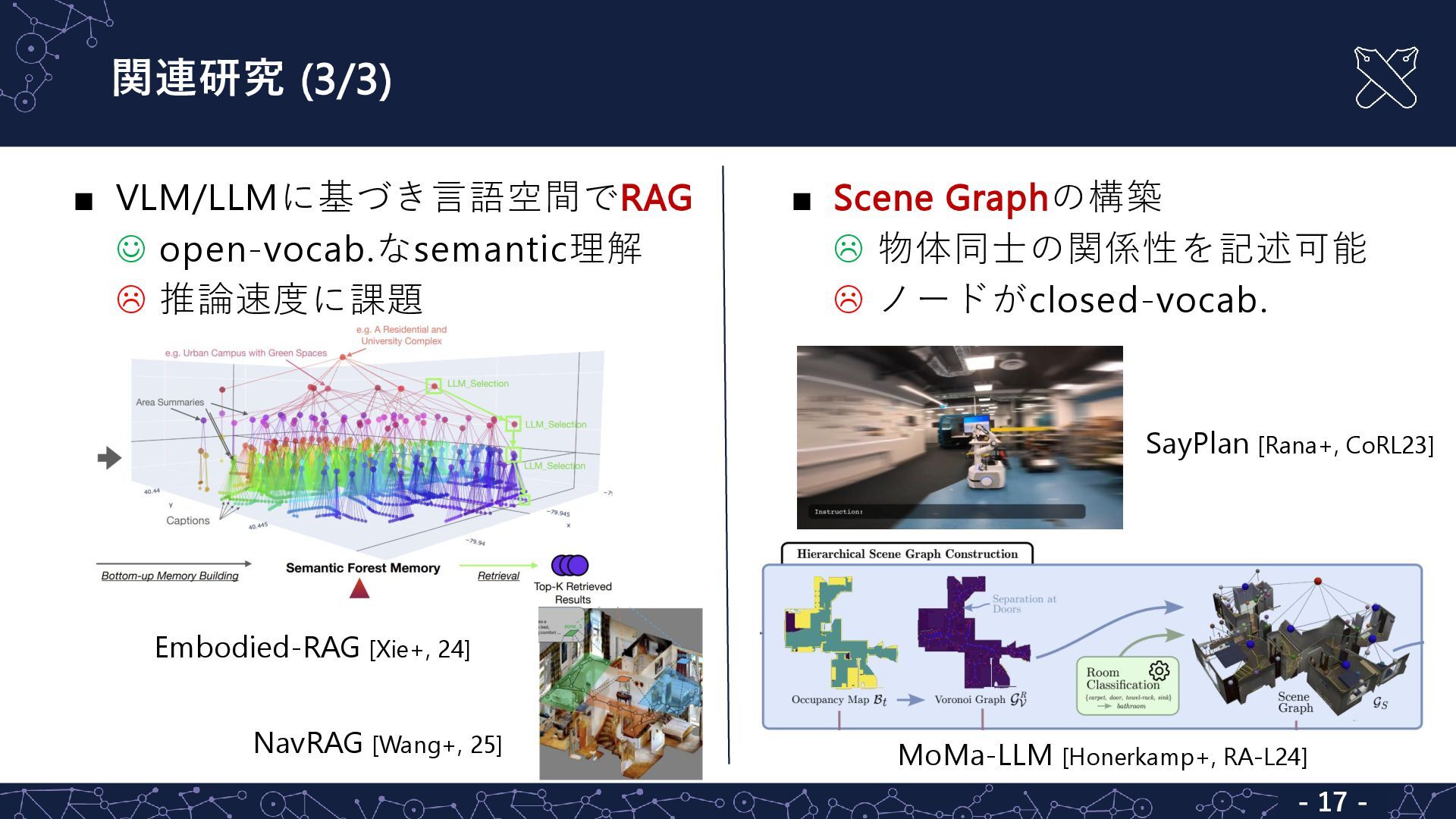
関連研究 (3/3) ▪ VLM/LLMに基づき言語空間でRAG ☺ open-vocab.なsemantic理解 推論速度に課題 ▪ Scene
Graphの構築 物体同士の関係性を記述可能 ノードがclosed-vocab. SayPlan [Rana+, CoRL23] MoMa-LLM [Honerkamp+, RA-L24] Embodied-RAG [Xie+, 24] NavRAG [Wang+, 25] - 17 -
{kind=link}
![背景:Open-Vocabulary Mobile Manipulation (OVMM) ▪ OVMM [Yenamandra+, CoRL/NeurIPS23], [Liu+, 24]](https://files.speakerdeck.com/presentations/bf73d36f8a5f4426a05fe25cea687376/slide_1.jpg){kind=link}
{kind=link}
![関連研究:行動実現性の考慮は不十分 - 4 - マルチモーダル検索に 基づく移動・物体操作 NLMap [Chen+, ICRA23], MultiRankIt](https://files.speakerdeck.com/presentations/bf73d36f8a5f4426a05fe25cea687376/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![定量的結果: 対象物体・配置目標ともにベースライン手法を上回る検索性能 [%] 手法 対象物体 配置目標 全体 R@10↑ R@20↑ R@10↑](https://files.speakerdeck.com/presentations/bf73d36f8a5f4426a05fe25cea687376/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}