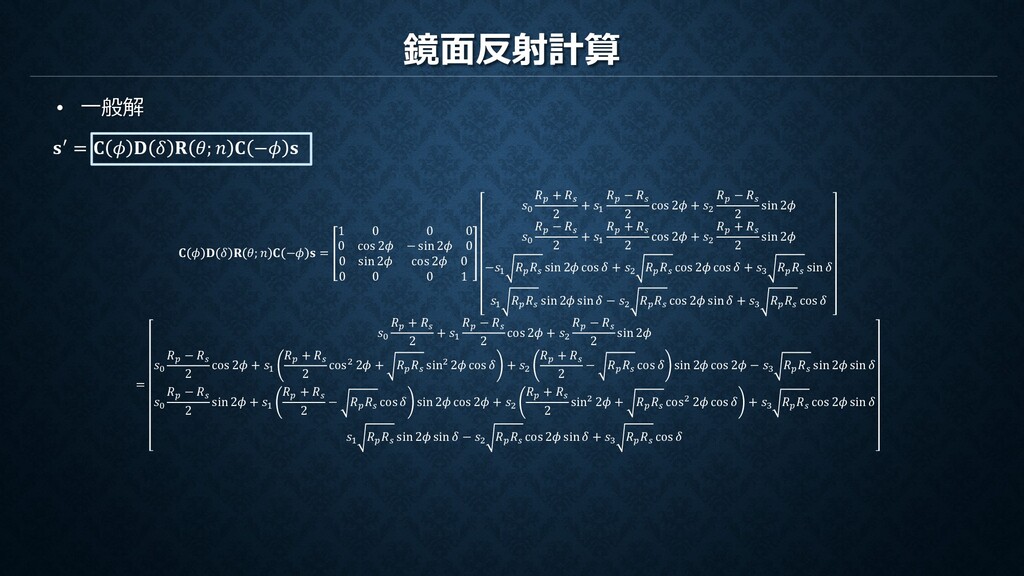
1 0 0 cos 2 0 0 − sin 2 0 0 sin 2 0 0 cos 2 0 0 1 0 + 2 + 1 − 2 cos 2 + 2 − 2 sin 2 0 − 2 + 1 + 2 cos 2 + 2 + 2 sin 2 −1 sin 2 cos + 2 cos 2 cos + 3 sin 1 sin 2 sin − 2 cos 2 sin + 3 cos = 0 + 2 + 1 − 2 cos 2 + 2 − 2 sin 2 0 − 2 cos 2 + 1 + 2 cos2 2 + sin2 2 cos + 2 + 2 − cos sin 2 cos 2 − 3 sin 2 sin 0 − 2 sin 2 + 1 + 2 − cos sin 2 cos 2 + 2 + 2 sin2 2 + cos2 2 cos + 3 cos 2 sin 1 sin 2 sin − 2 cos 2 sin + 3 cos
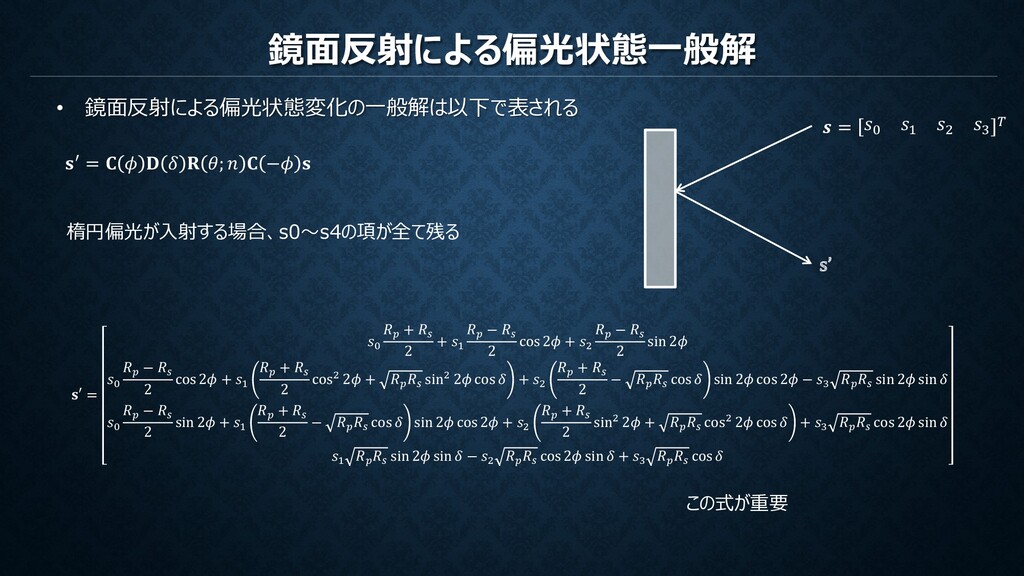
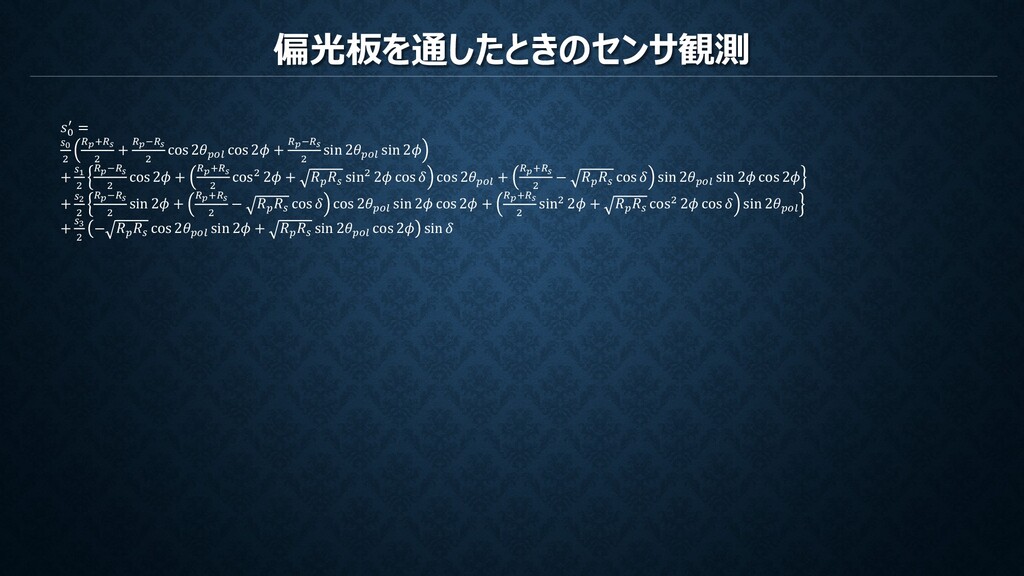
2 3 s’ この式が重要 = 0 + 2 + 1 − 2 cos 2 + 2 − 2 sin 2 0 − 2 cos 2 + 1 + 2 cos2 2 + sin2 2 cos + 2 + 2 − cos sin 2 cos 2 − 3 sin 2 sin 0 − 2 sin 2 + 1 + 2 − cos sin 2 cos 2 + 2 + 2 sin2 2 + cos2 2 cos + 3 cos 2 sin 1 sin 2 sin − 2 cos 2 sin + 3 cos 楕円偏光が入射する場合、s0~s4の項が全て残る
3 = 0 = 1 0 0 0 s’ = 0 + 2 + 1 − 2 cos 2 + 2 − 2 sin 2 0 − 2 cos 2 + 1 + 2 cos2 2 + sin2 2 cos + 2 + 2 − cos sin 2 cos 2 − 3 sin 2 sin 0 − 2 sin 2 + 1 + 2 − cos sin 2 cos 2 + 2 + 2 sin2 2 + cos2 2 cos + 3 cos 2 sin 1 sin 2 sin − 2 cos 2 sin + 3 cos
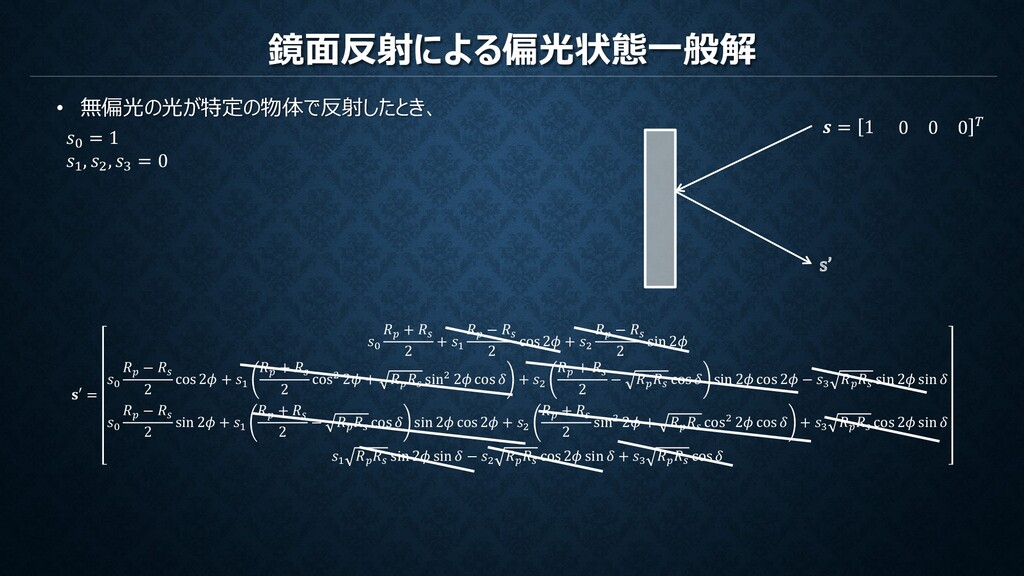
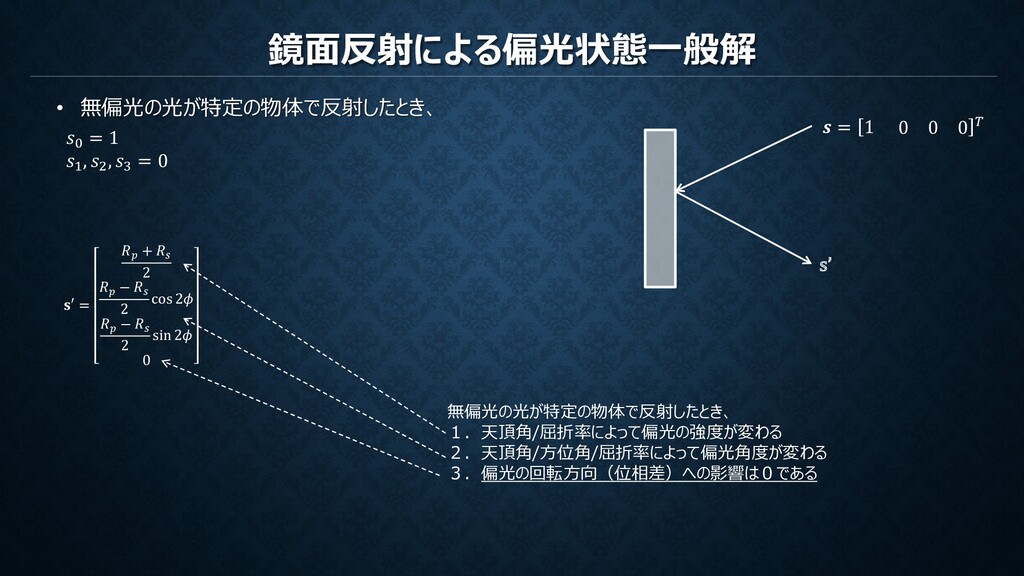
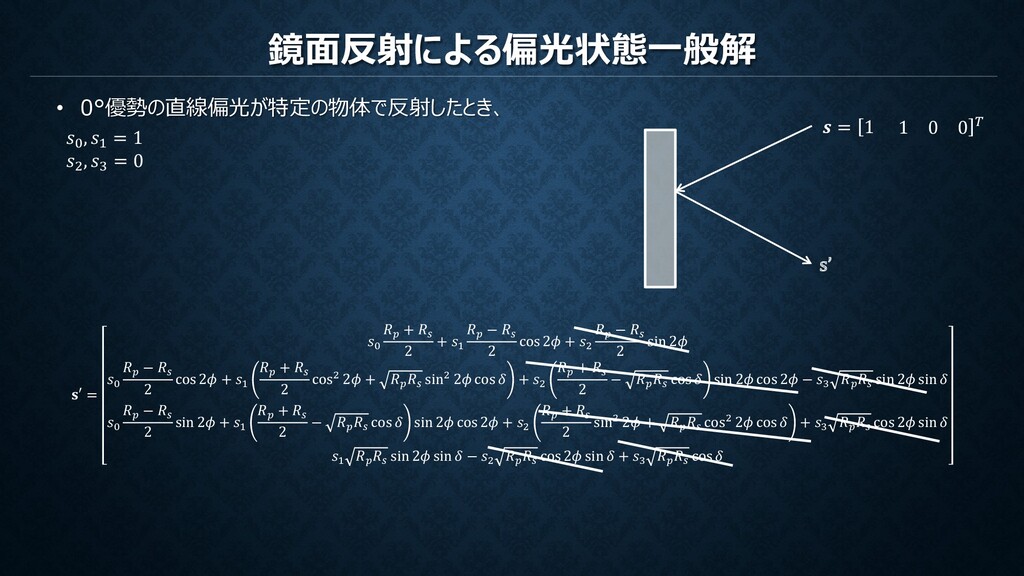
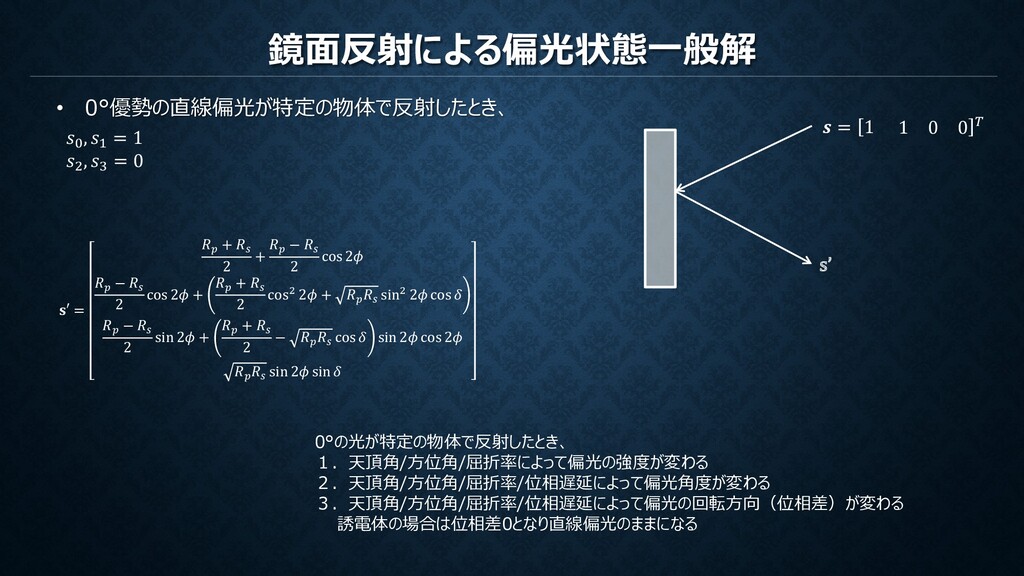
3 = 0 = 1 1 0 0 s’ = 0 + 2 + 1 − 2 cos 2 + 2 − 2 sin 2 0 − 2 cos 2 + 1 + 2 cos2 2 + sin2 2 cos + 2 + 2 − cos sin 2 cos 2 − 3 sin 2 sin 0 − 2 sin 2 + 1 + 2 − cos sin 2 cos 2 + 2 + 2 sin2 2 + cos2 2 cos + 3 cos 2 sin 1 sin 2 sin − 2 cos 2 sin + 3 cos
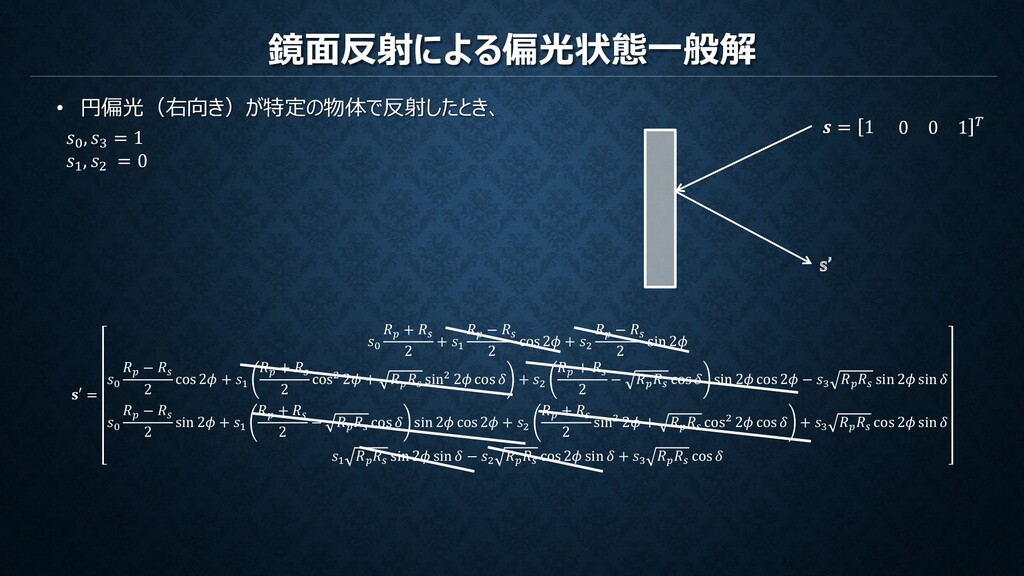
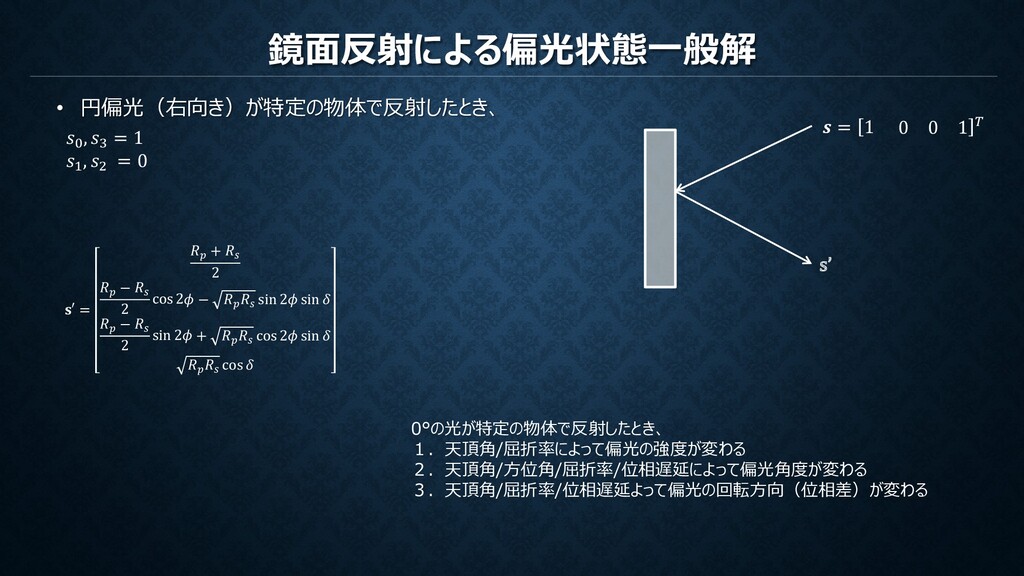
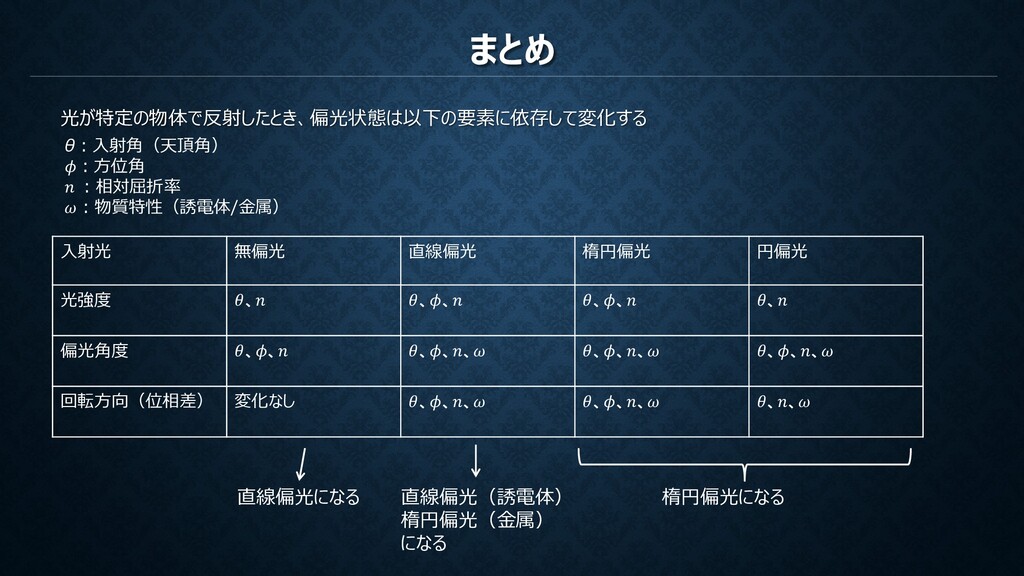
0 = 1 0 0 1 s’ = 0 + 2 + 1 − 2 cos 2 + 2 − 2 sin 2 0 − 2 cos 2 + 1 + 2 cos2 2 + sin2 2 cos + 2 + 2 − cos sin 2 cos 2 − 3 sin 2 sin 0 − 2 sin 2 + 1 + 2 − cos sin 2 cos 2 + 2 + 2 sin2 2 + cos2 2 cos + 3 cos 2 sin 1 sin 2 sin − 2 cos 2 sin + 3 cos • 円偏光(右向き)が特定の物体で反射したとき、
2 = 0 = 1 0 0 1 s’ = + 2 − 2 cos 2 − sin 2 sin − 2 sin 2 + cos 2 sin cos 0°の光が特定の物体で反射したとき、 1.天頂角/屈折率によって偏光の強度が変わる 2.天頂角/方位角/屈折率/位相遅延によって偏光角度が変わる 3.天頂角/屈折率/位相遅延よって偏光の回転方向(位相差)が変わる
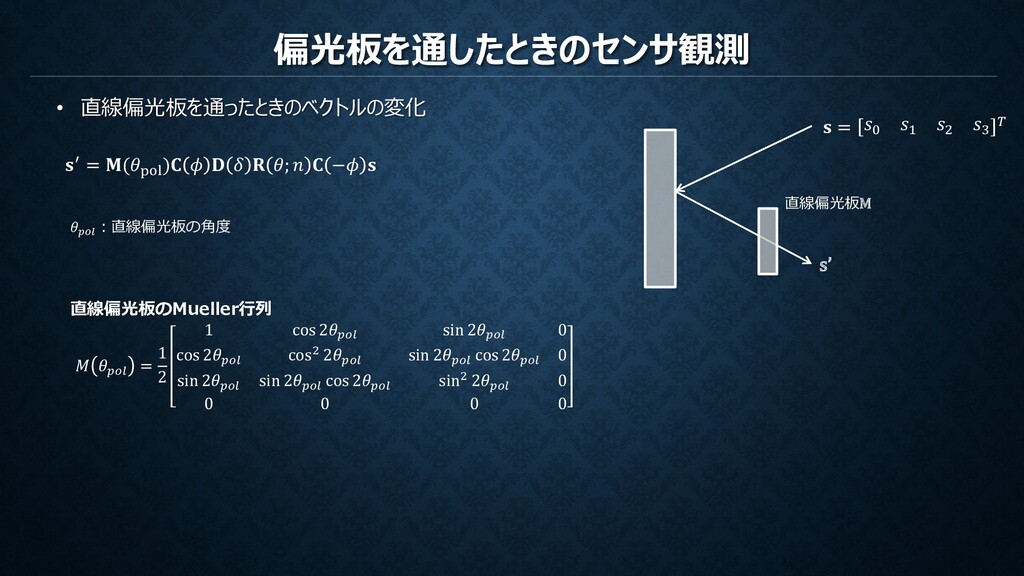
= 1 2 1 cos 2 sin 2 0 cos2 cos2 2 sin 2 cos2 0 sin 2 sin 2 cos2 sin2 2 0 0 0 0 0 0 + 2 + 1 − 2 cos2 + 2 − 2 sin 2 0 − 2 cos 2 + 1 + 2 cos2 2 + sin2 2 cos + 2 + 2 − cos sin 2 cos 2 − 3 sin 2 sin 0 − 2 sin 2 + 1 + 2 − cos sin 2 cos 2 + 2 + 2 sin2 2 + cos2 2 cos + 3 cos2 sin 1 sin 2 sin − 2 cos2 sin + 3 cos
2 cos 2 cos 2 + − 2 sin 2 sin 2 + 1 2 − 2 cos 2 + + 2 cos2 2 + sin2 2 cos cos 2 + + 2 − cos sin 2 sin 2 cos 2 + 2 2 − 2 sin 2 + + 2 − cos cos 2 sin 2 cos 2 + + 2 sin2 2 + cos2 2 cos sin 2 + 3 2 − cos 2 sin 2 + sin 2 cos 2 sin
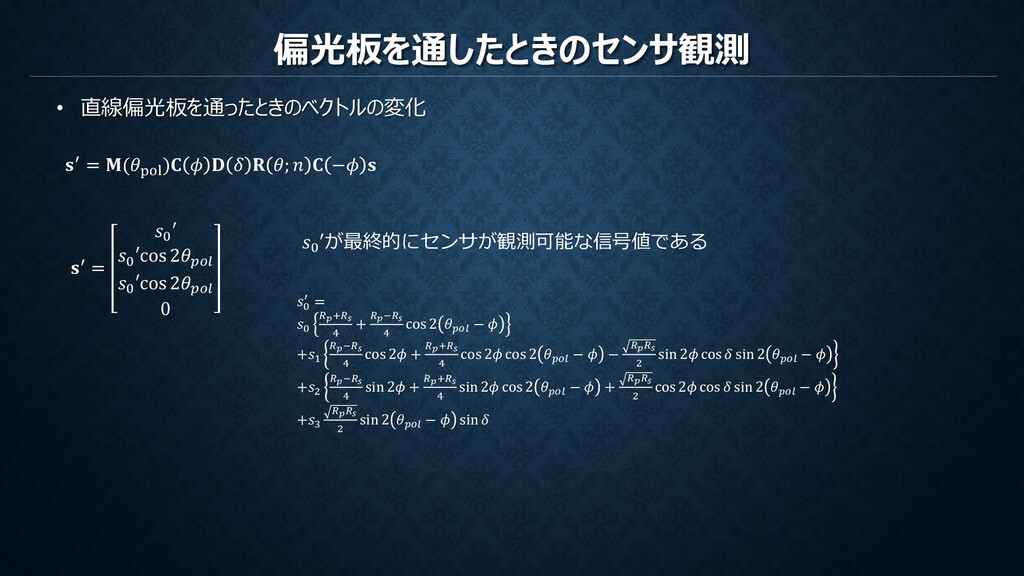
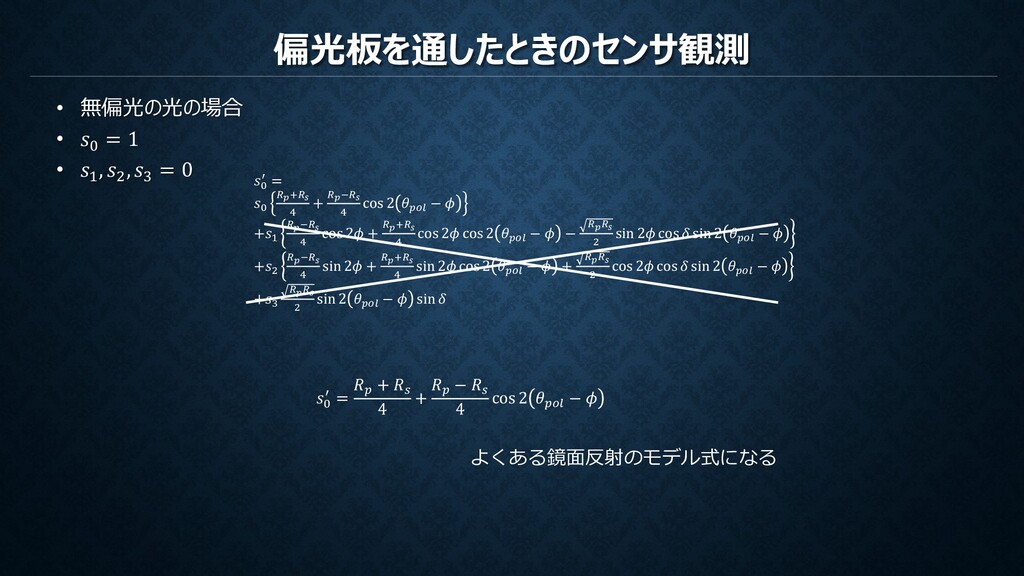
0 ′cos 2 0 ′ = (pol ) ; − 0 ′ = 0 + 4 + − 4 cos 2 − +1 − 4 cos 2 + + 4 cos 2 cos 2 − − 2 sin 2 cos sin 2 − +2 − 4 sin 2 + + 4 sin 2 cos 2 − + 2 cos 2 cos sin 2 − +3 2 sin 2 − sin 0 ′が最終的にセンサが観測可能な信号値である
2 , 3 = 0 0 ′ = 0 + 4 + − 4 cos 2 − +1 − 4 cos 2 + + 4 cos 2 cos 2 − − 2 sin 2 cos sin 2 − +2 − 4 sin 2 + + 4 sin 2 cos 2 − + 2 cos 2 cos sin 2 − +3 2 sin 2 − sin 0 ′ = + 4 + − 4 cos 2 − よくある鏡面反射のモデル式になる
2 , 3 = 0 0 ′ = 0 + 4 + − 4 cos 2 − +1 − 4 cos 2 + + 4 cos 2 cos 2 − − 2 sin 2 cos sin 2 − +2 − 4 sin 2 + + 4 sin 2 cos 2 − + 2 cos 2 cos sin 2 − +3 2 sin 2 − sin 0 ′ = + 4 + − 4 cos 2 − + − 4 cos 2 + + 4 cos 2 cos 2 − − 2 sin 2 cos sin 2 −
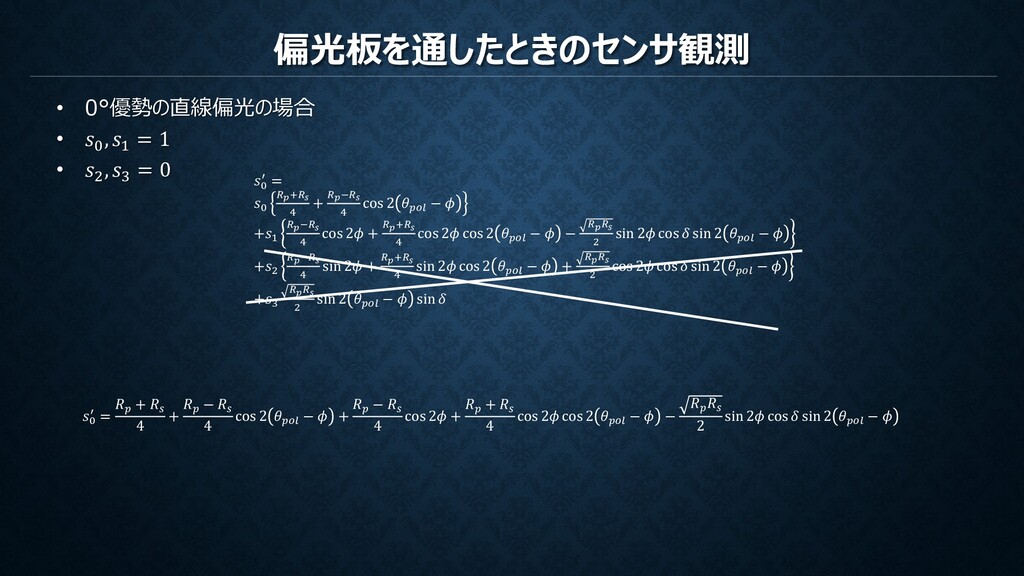
1 , 2 = 0 0 ′ = 0 + 4 + − 4 cos 2 − +1 − 4 cos 2 + + 4 cos 2 cos 2 − − 2 sin 2 cos sin 2 − +2 − 4 sin 2 + + 4 sin 2 cos 2 − + 2 cos 2 cos sin 2 − +3 2 sin 2 − sin 0 ′ = + 4 + − 4 cos 2 − + 2 sin 2 − sin
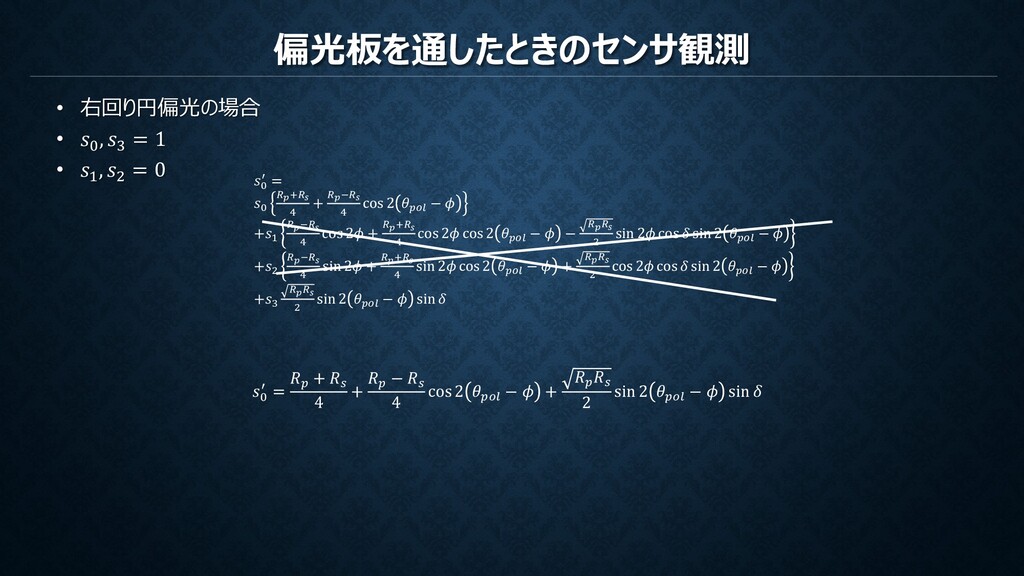
{kind=link}
{kind=link}
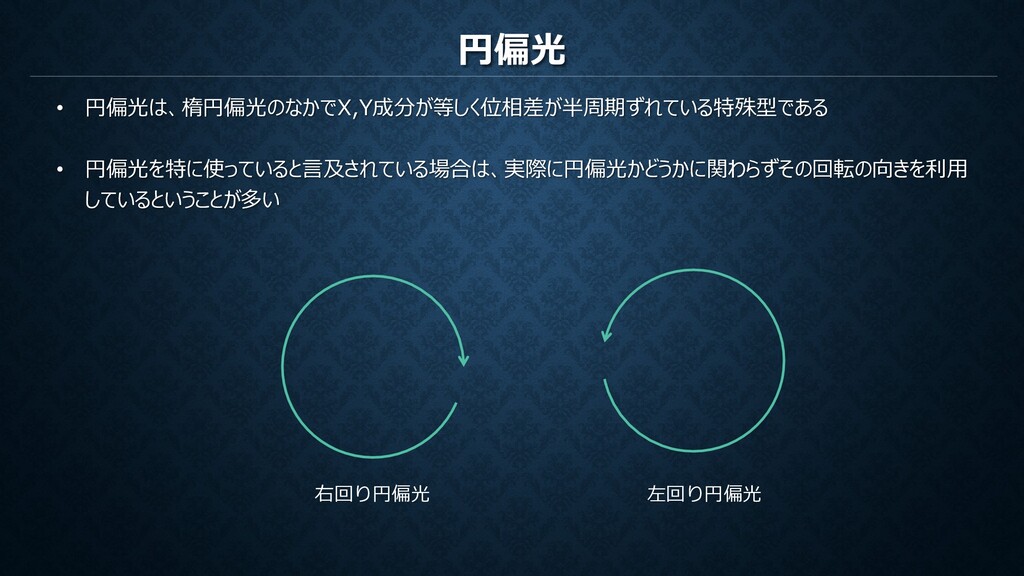
![円偏光 • 光の振動が円のように伝わる偏光 • [円偏光、直線偏光] ∈ 楕円偏光 円偏光 直線偏光 楕円偏光](https://files.speakerdeck.com/presentations/cc4ff1618fa64fa1ae9732c8bd7b9d77/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}