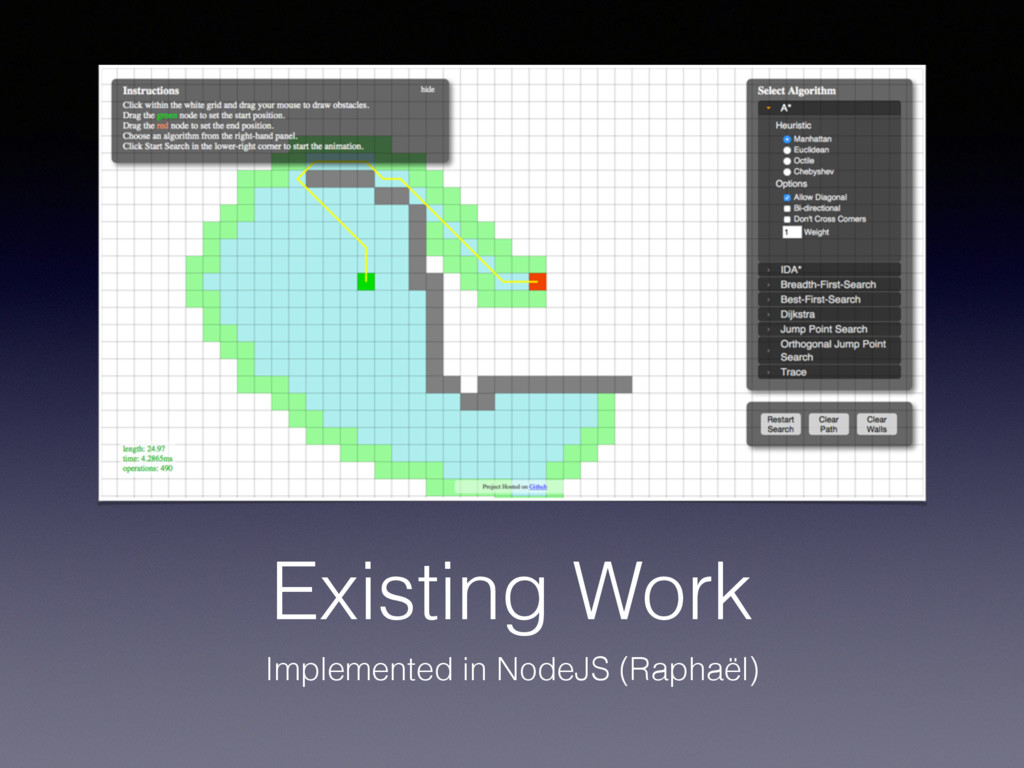
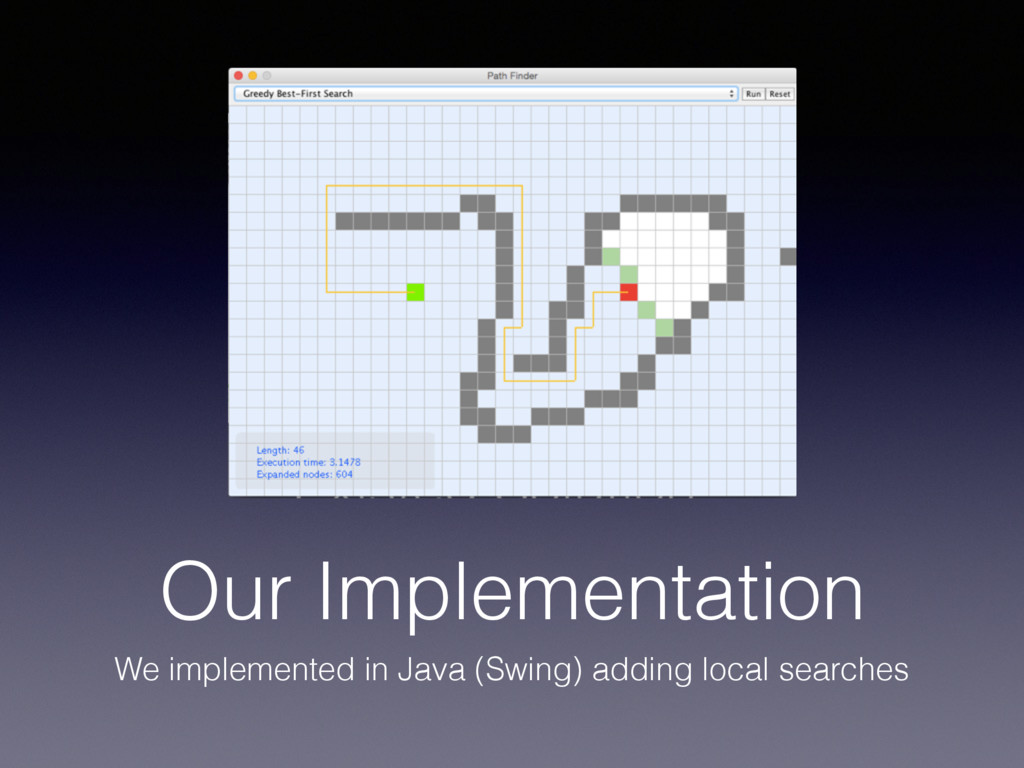
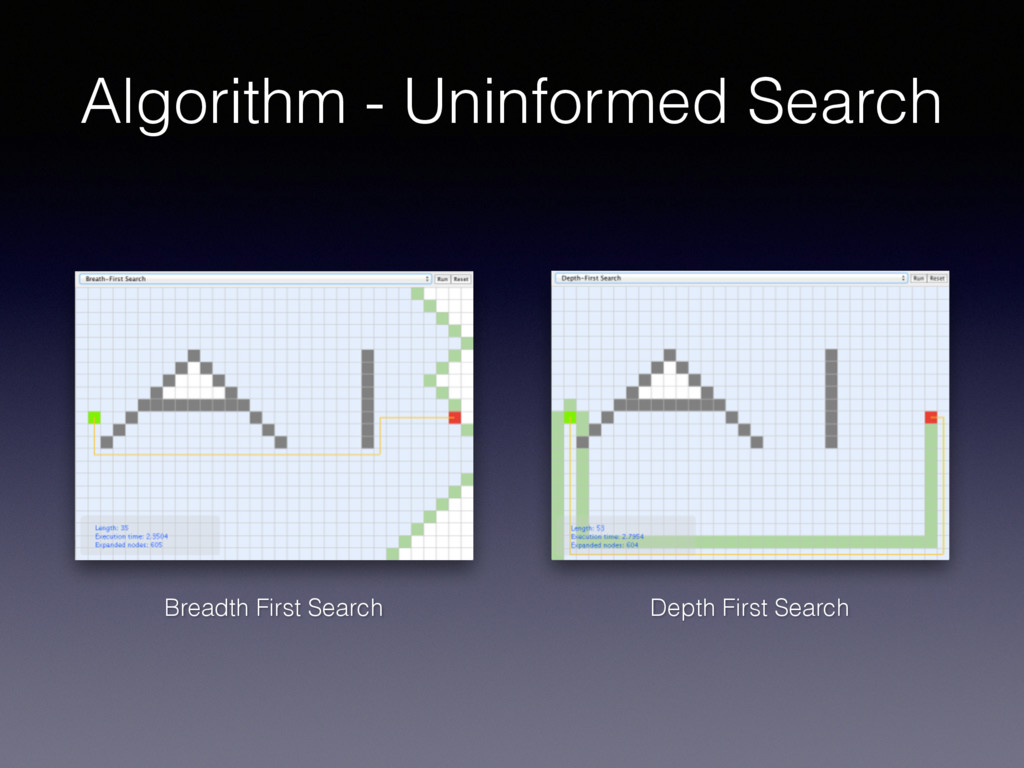
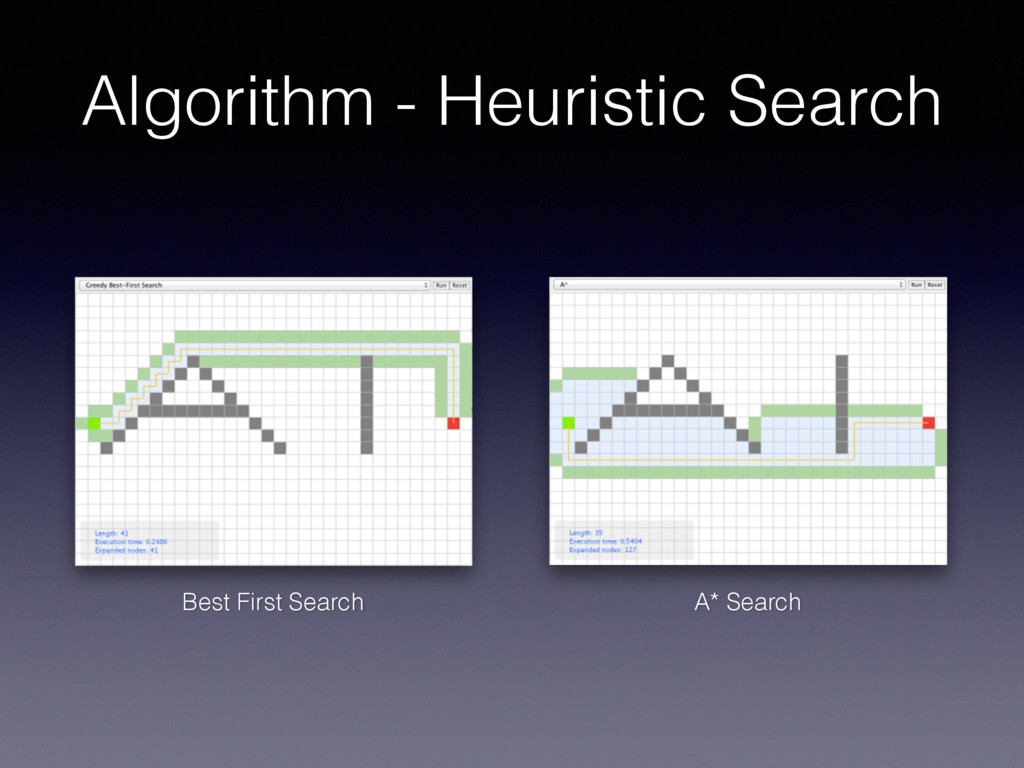
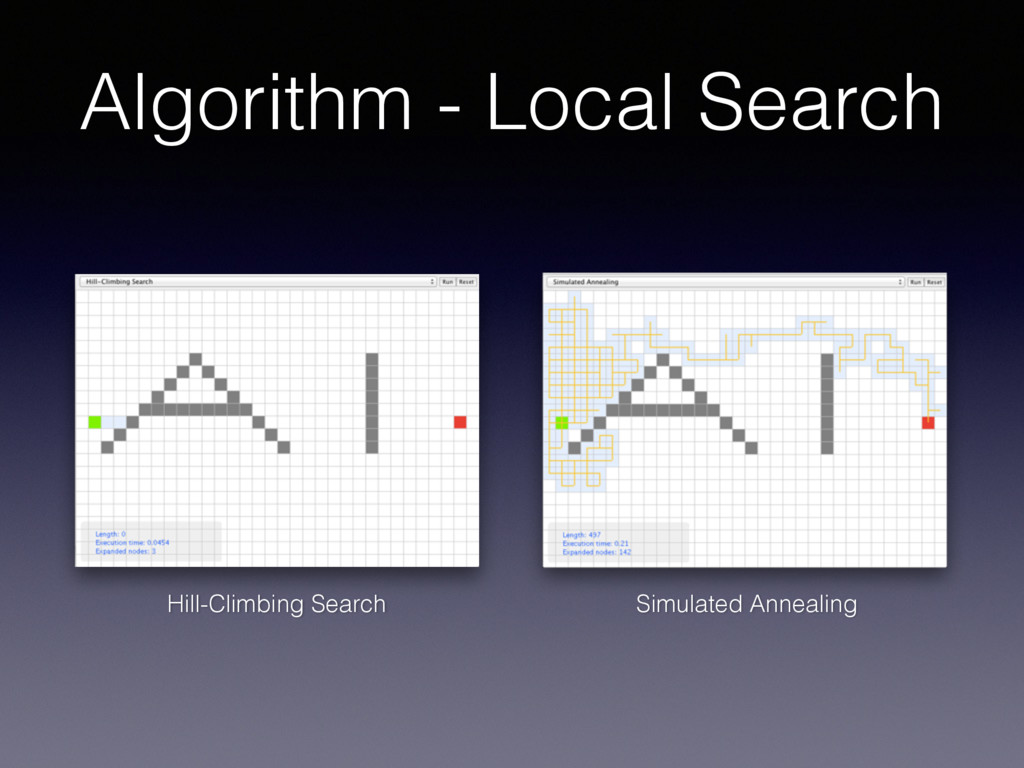
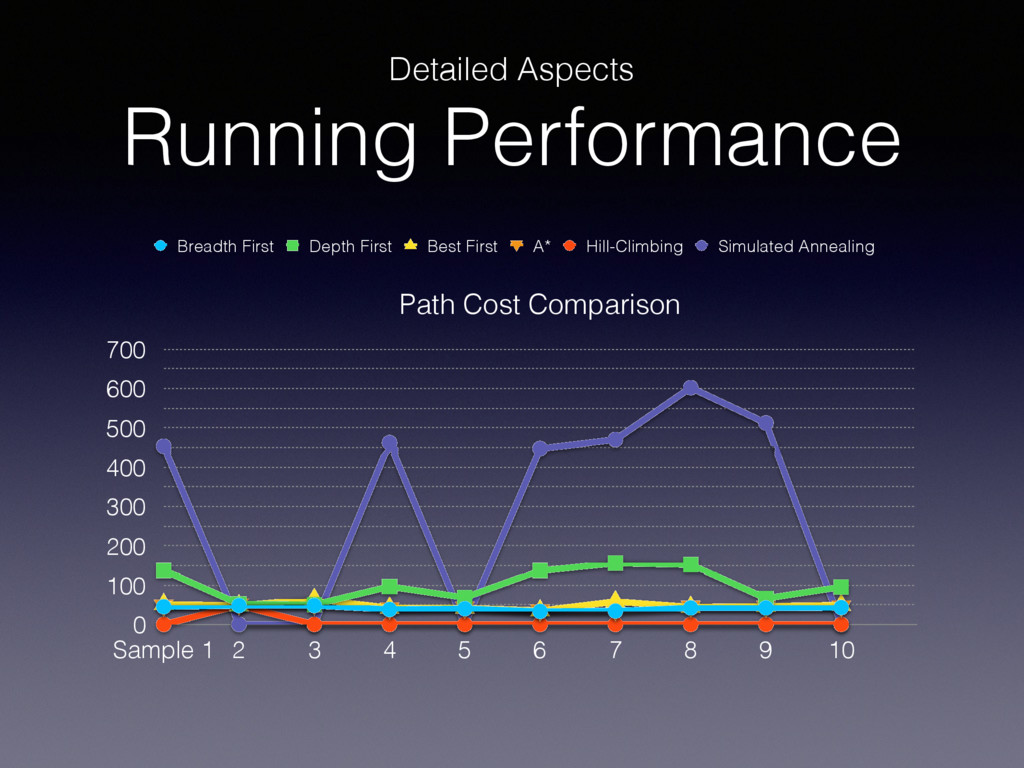
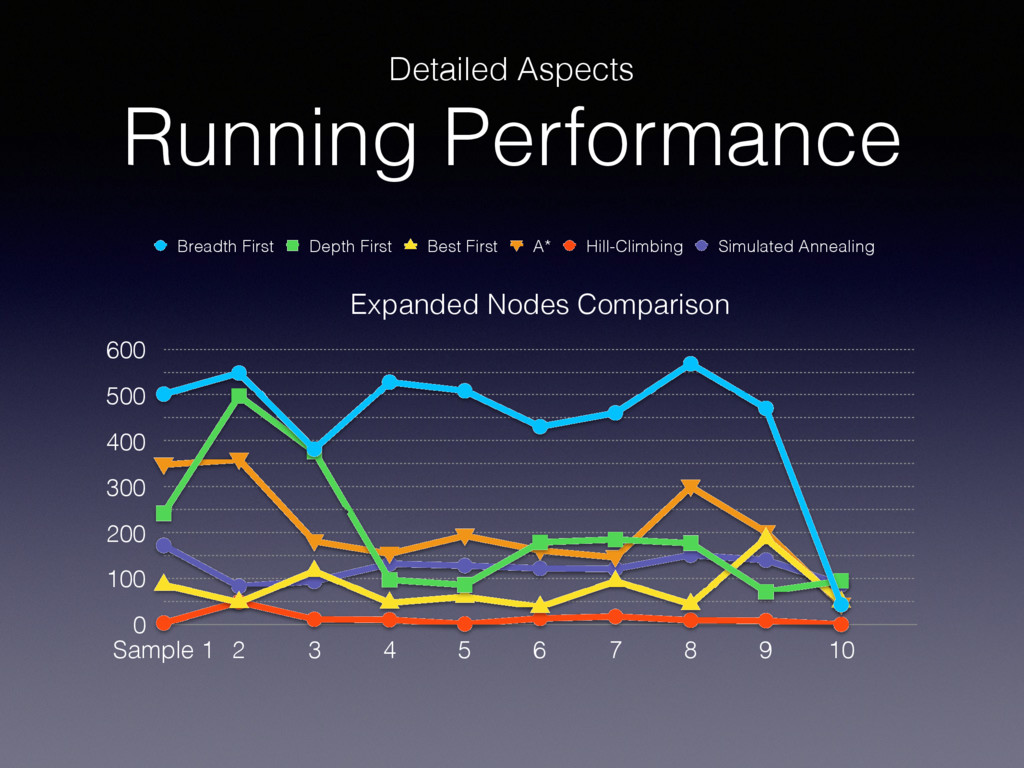
path on a grid from a given square A to destination B using: - Uninformed search algorithms (Breadth First, Depth First) - Heuristic search algorithms ( Best First, A*) - Local Search algorithms (Hill-climbing, Simulated annealing) • Make use of Manhattan distance heuristics for the informed search and scoring function for local search.
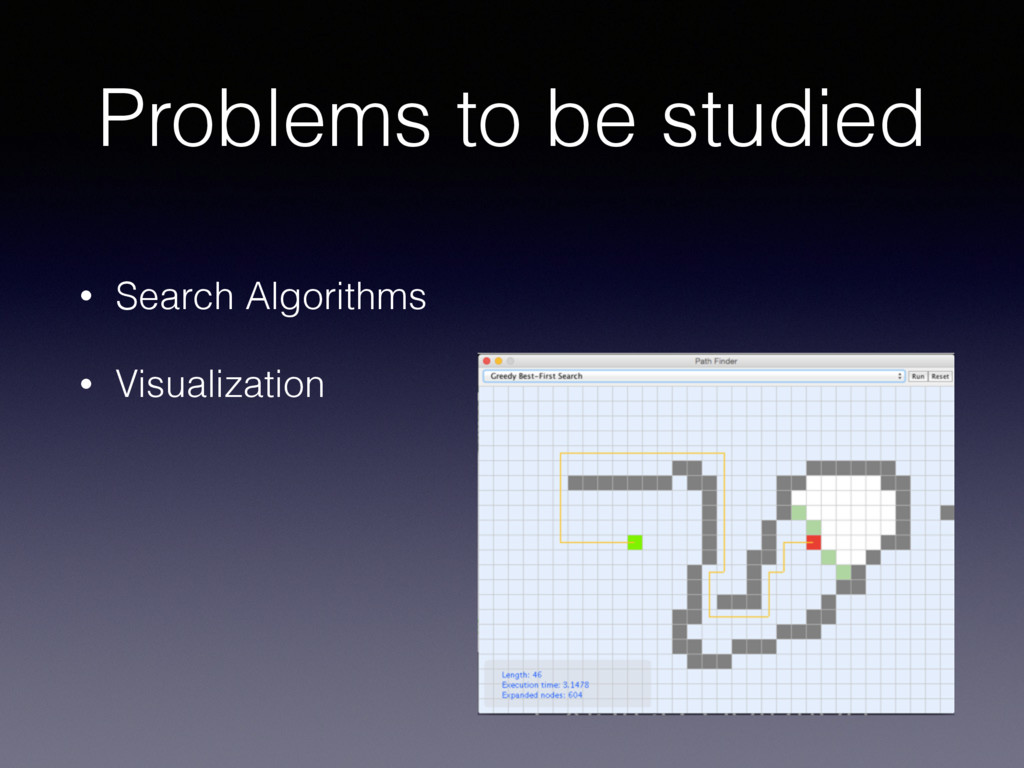
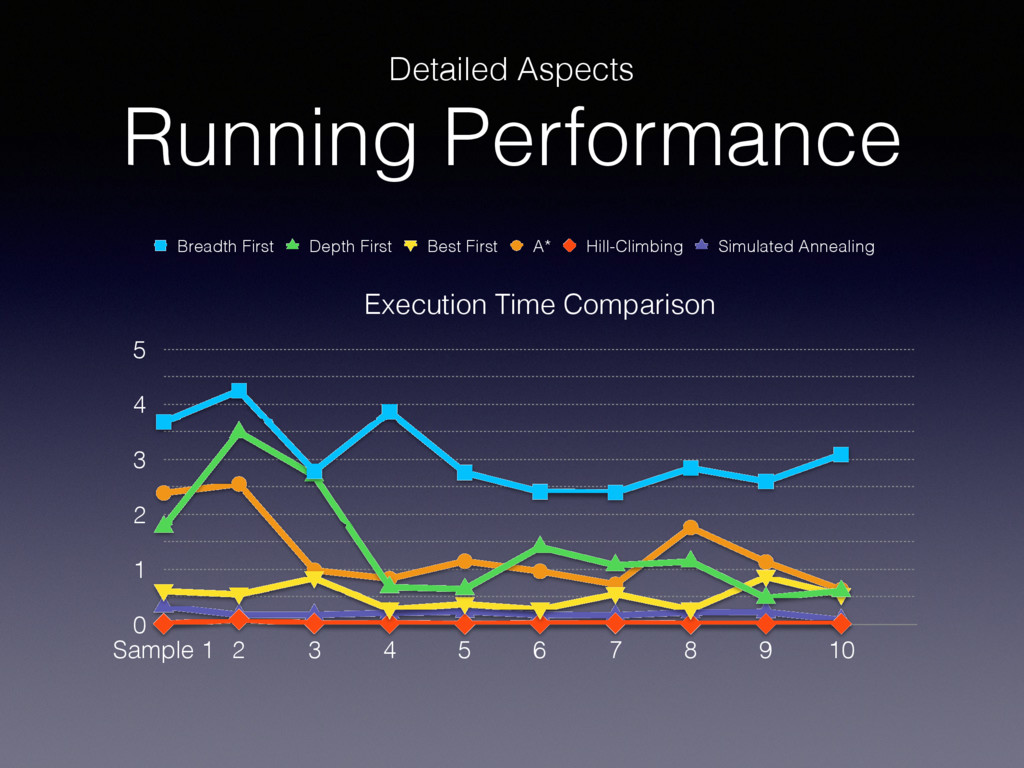
goal, the Depth First can reach the goal only in finite state space. • Greedy Best First Search finds suboptimal path, and A* Search is guaranteed to find the shortest path if the heuristic is never larger than the true distance. In the implementation, we use Manhattan Heuristic. • Hill-Climbing Search and Simulated Annealing are not even guaranteed to find a solution, have linear time/space advantage. • A* is a good choice for most pathfinding needs.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}