Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Turtlebot3に無理やり超音波センサを入れてみた
Search
Sponsored
·
SiteGround - Reliable hosting with speed, security, and support you can count on.
→
KMiura
October 06, 2021
Technology
1.4k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Turtlebot3に無理やり超音波センサを入れてみた
2021-10-06 ROS Japan UG #44 LT大会
https://rosjp.connpass.com/event/222141/#_=_
KMiura
October 06, 2021
More Decks by KMiura
See All by KMiura
運用しているアプリケーションのDBのリプレイスをやってみた
miura55
1
1.2k
Amazon Rekognitionを使ったインターホンハック
miura55
0
130
Pythonでルンバをハックしてみた
miura55
0
260
あなたの知らないクラフトビールの世界
miura55
0
450
Storage Browser for Amazon S3を触ってみた + α
miura55
0
300
Cloudflare R2をトリガーにCloudflare Workersを動かしてみた
miura55
0
320
あのボタンでつながるSORACOM
miura55
0
190
Postman Flowsで作るAPI連携LINE Bot
miura55
0
440
Lambdaと共に歩んだAWS
miura55
3
1.1k
Other Decks in Technology
See All in Technology
発表と総括 / Presentations and Summary
ks91
PRO
0
190
Vポイント分析基盤におけるデータモデリング20年史
taromatsui_cccmkhd
4
730
Webの技術とガジェットで子どもも大人も楽しめるワクワク体験を提供する / Qiita Tech Festa Day 2026
you
PRO
1
170
穢れた技術選定について
watany
19
6.2k
生成 AI 時代にいま一度「問い合わせ」について考えてみる
kazzpapa3
1
130
大 AI 時代におけるC# の事情 ~ぶっちゃけトークを交えながら~
nenonaninu
0
130
壊して学ぶAWS CDK: そのcdk deployで消えるもの、残るもの
k_adachi_01
1
480
Jitera Company Deck
jitera
0
280
”AIを使う” から ”AIに任せる” へ ─ 開発プロセスを再設計してAIを組織標準にするまで
cyberagentdevelopers
PRO
1
140
事業成長とAI活用を止めないデータ基盤アーキテクチャの設計思想
hiracky16
0
540
「顧客の声を聞かなければ何も始まらない」 ── 顧客の声から生まれた『AI返信補助機能』の開発プロセス / AICon2026_shikata_imai
rakus_dev
1
270
AI時代におけるテストの基礎の再定義 / Rethinking the Fundamentals of Testing in the AI Era
mineo_matsuya
14
4.7k
Featured
See All Featured
A designer walks into a library…
pauljervisheath
211
24k
Breaking role norms: Why Content Design is so much more than writing copy - Taylor Woolridge
uxyall
0
350
My Coaching Mixtape
mlcsv
0
170
The browser strikes back
jonoalderson
0
1.4k
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
230
Optimizing for Happiness
mojombo
378
71k
Taking LLMs out of the black box: A practical guide to human-in-the-loop distillation
inesmontani
PRO
3
2.3k
Noah Learner - AI + Me: how we built a GSC Bulk Export data pipeline
techseoconnect
PRO
0
330
Raft: Consensus for Rubyists
vanstee
141
7.6k
Keith and Marios Guide to Fast Websites
keithpitt
413
23k
Joys of Absence: A Defence of Solitary Play
codingconduct
1
420
XXLCSS - How to scale CSS and keep your sanity
sugarenia
249
1.3M
Transcript
Turtlebot3に無理やり超音波センサを入 れてみた KMiura(@k_miura_io)
自己紹介 • 三浦 耕生(こうき) • 名古屋のゲーム会社 のサーバーエンジニア @k_miura_io koki.miura05
ROSを始めた頃 • 大学時代に授業で知ってから触るようになった • 当時は日本語のドキュメントが少なくて挫折してた(先輩の知見がない) • 当時はC++でだましだましコーディング(中身はよく分かってない)
あれから5年
またROSやりたくなった • 自作PCにUbuntuを突っ込んだときにやってみたくなった • Pythonでもできるし、分かれば結構楽しい(はず) • Raspberry Piでロボットを作ってみたい
時代が変わった • Ubuntuしか使えないと思ってたROSがい つの間にかWindowsでも使えるようになっ ていた • Turtlebotも2から3へ • ROS2なるものが出てる… •
AWSでROSが動かせるとか…?
None
本を買った • 情報が古いけどサンプルコードの文法は大きく変 わっていることが無いので結構使える • 本で使用しているTurtlebotは2 • Turtlebot3はKinectじゃないので障害物回避系 のコードはまともに動かない←今回の問題
ドキュメントを見ると… • センサを追加して拡張できるっぽい • 超音波センサーも追加できるっぽい • 実機はできると書いててもGazeboでの対応は書 いてない…
解決してみた
自前で用意するのが簡単 • 形にこだわらなければ仮の物体でセンサーを用意しとけば良さそう • Turtlebot3のオブジェクトを定義したXacroファイルにセンサの機能情報と 位置情報を与えればセンサーからトピック飛ばせるっぽい • トピックはROSの標準ドライバーを使っているので実機でつないだときに使える Turtlebot3のトピックとはちょっと違う
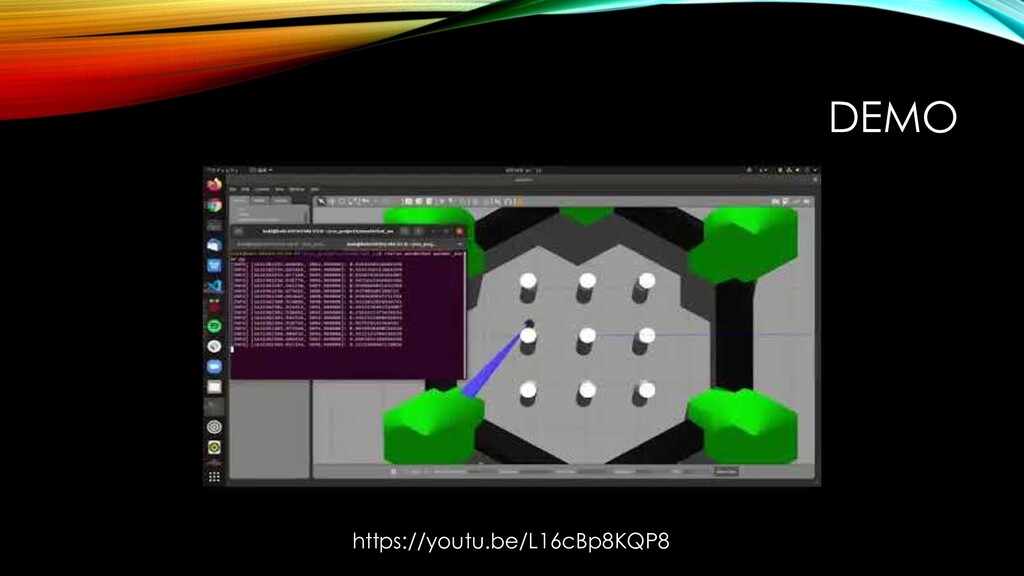
完成 • すごい付け焼き刃感はあるけどちゃんとセ ンサが機能している • 青い放射線はデバッグ用に可視化してる (可視化しないようにすることもできる)
DEMO https://youtu.be/L16cBp8KQP8
まとめ • GazeboのTurtlebot3に無理やりセンサーを足せた • 標準で使えるセンサードライバーが豊富なのがいい!(IMU、カメラなど) • ROSのエコシステムについてやっと分かった気がする
今回の内容をまとめた記事 https://zenn.dev/kmiura55/articles/ ros-turtlebot3-wander-sonar
END
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}