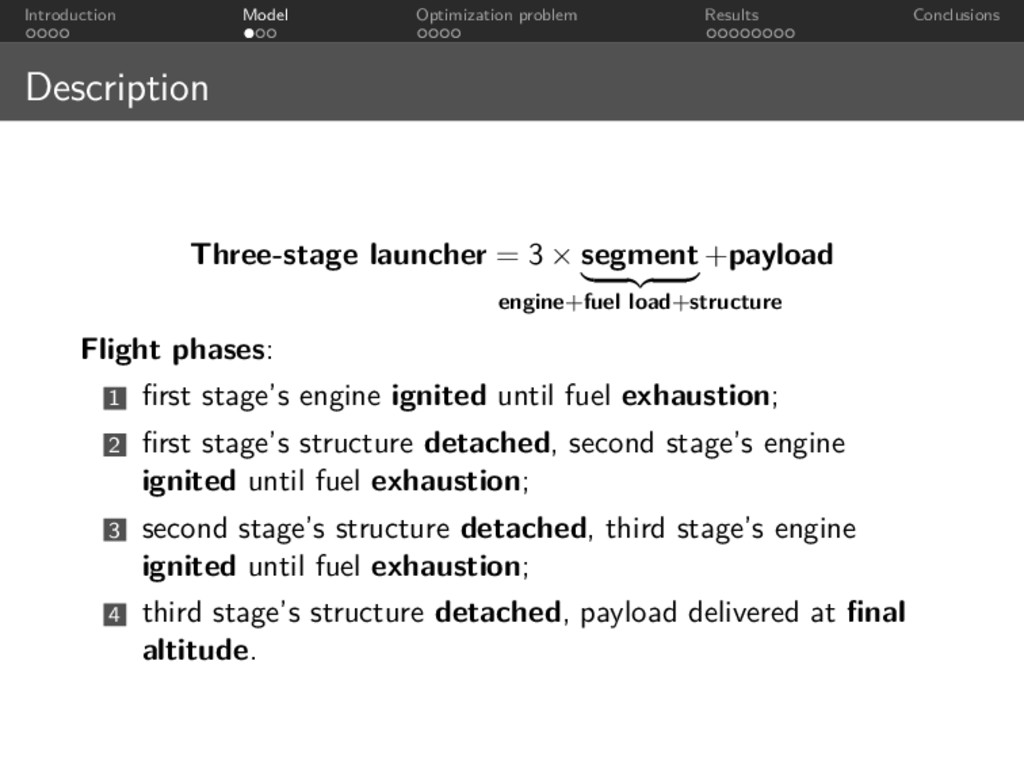
a three-stage launcher Achille Sassi1 Jean-Baptiste Caillau2, Max Cerf3, Emmanuel Tr´ elat4, Hasnaa Zidani1 1ENSTA ParisTech 2Universit´ e de Bourgogne 3Airbus Defence and Space 4Universit´ e Pierre et Marie Curie Journ´ ees du GdR MOA - Dijon, 02/11/2015
to a given altitude while minimizing the fuel load of the launcher. Some parameters are subject to uncertainties and we need the mission to succeed with a 90% probability.
x in X, the distribution of G(x, ω) is unknown. Solution: approximate it and translate the stochastic optimization problem into a deterministic one: P G(x, ω) ≤ 0 = 0 −∞ fG(x) (ξ)dξ ≈ 0 −∞ ˆ fG(x) (ξ)dξ where fG is the probability density function of G and ˆ fG its approximation.
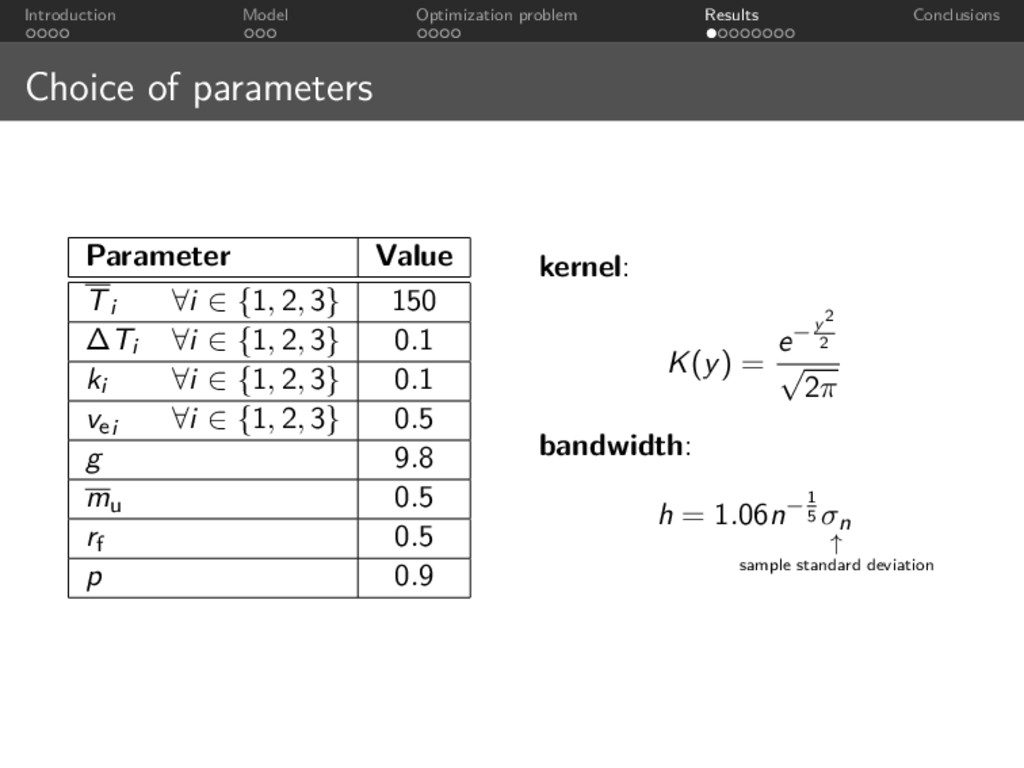
Let {s1, s2, . . . , sn} be a sample of size m from the random variable s. A Kernel Density Estimator for f is the function ˆ f (σ) := 1 mh m i=1 K σ − si h K : R → R (kernel) h > 0 (bandwidth) There isn’t an explicit formula for the error between f and ˆ f 1. 1S. J. Sheather. “Density Estimation”. In: Statistical Science 19(4) (2004), pp. 588–597.
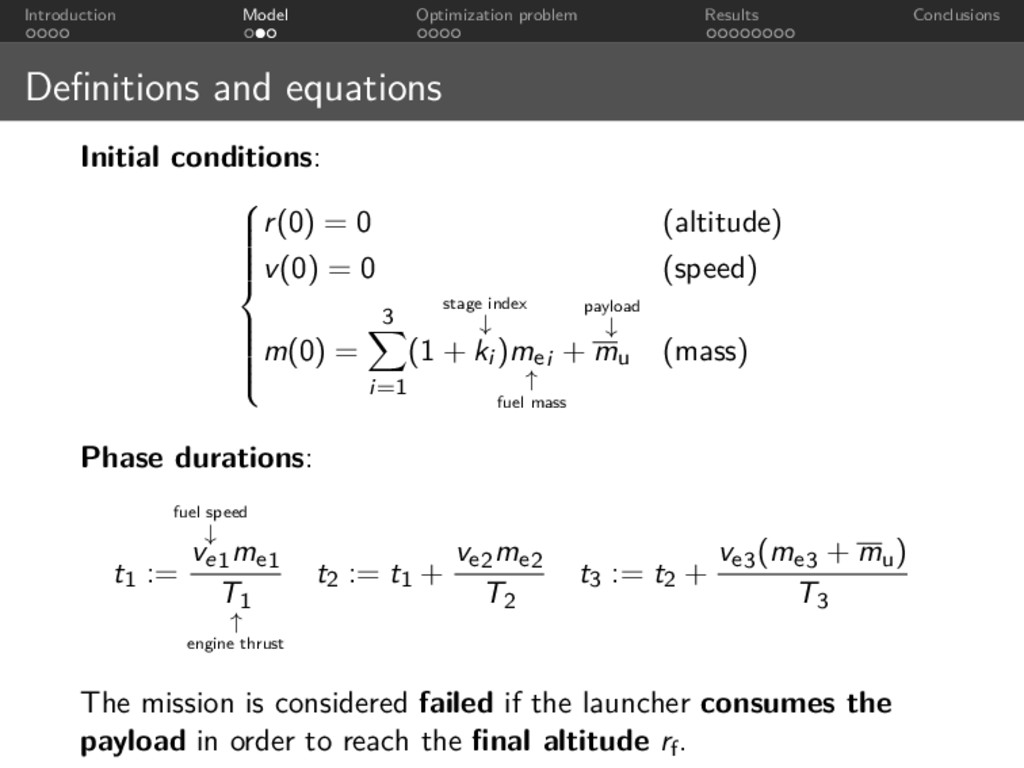
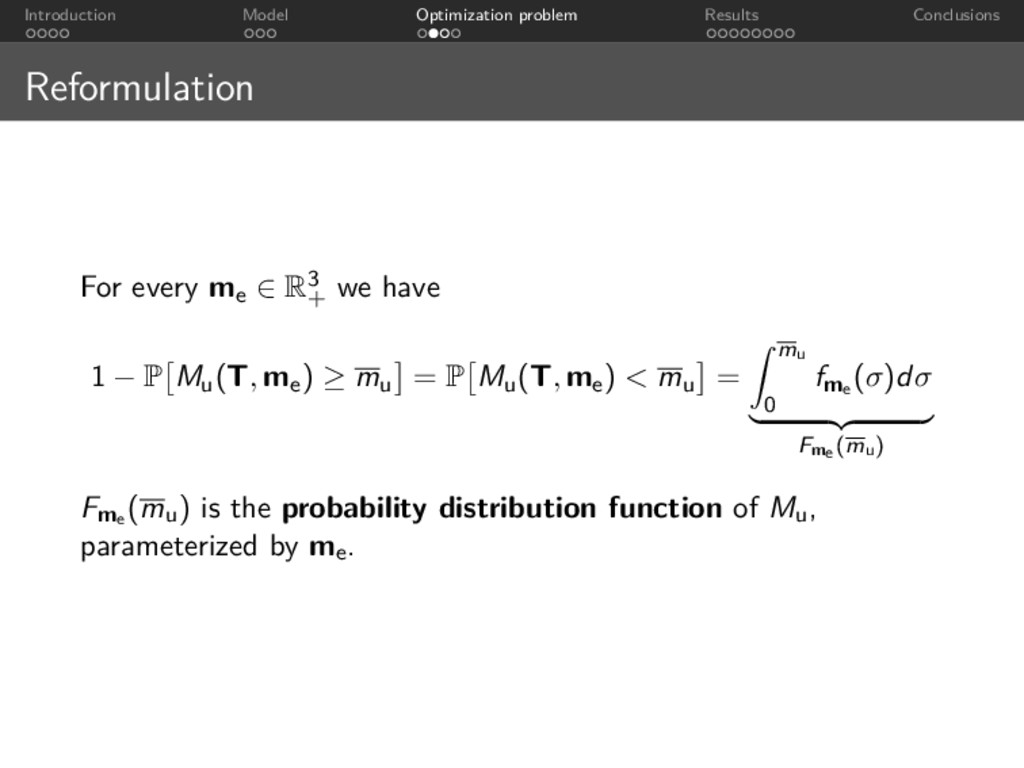
∈ R3 + we have 1 − P Mu(T, me) ≥ mu = P Mu(T, me) < mu = mu 0 fme (σ)dσ Fme (mu) Fme (mu) is the probability distribution function of Mu, parameterized by me.
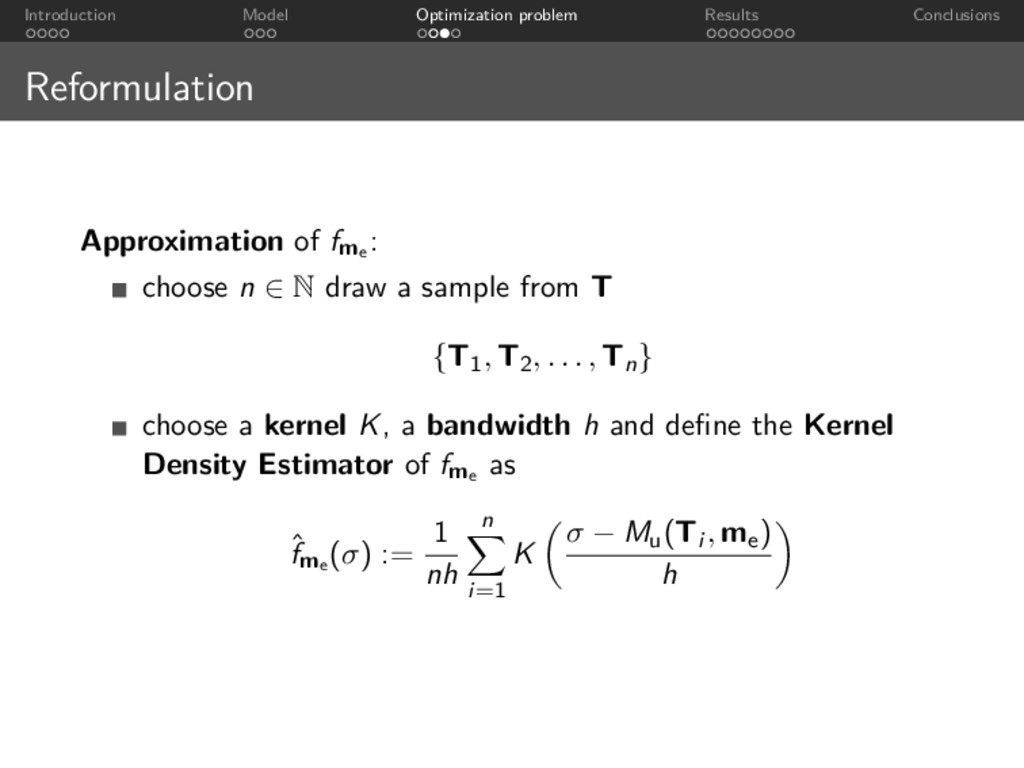
: choose n ∈ N draw a sample from T {T1, T2, . . . , Tn} choose a kernel K, a bandwidth h and define the Kernel Density Estimator of fme as ˆ fme (σ) := 1 nh n i=1 K σ − Mu(Ti , me) h
For n = 203 we take a uniform sample from T ∈ I1 × I2 × I3, and compute the optimal solution me1 ≈2.80326 me2 ≈1.88891 me3 ≈1.56716 which allows us to deliver the payload with a probability of 91,7% even if the maximum thrust Ti of each engine is subject to random oscillations.
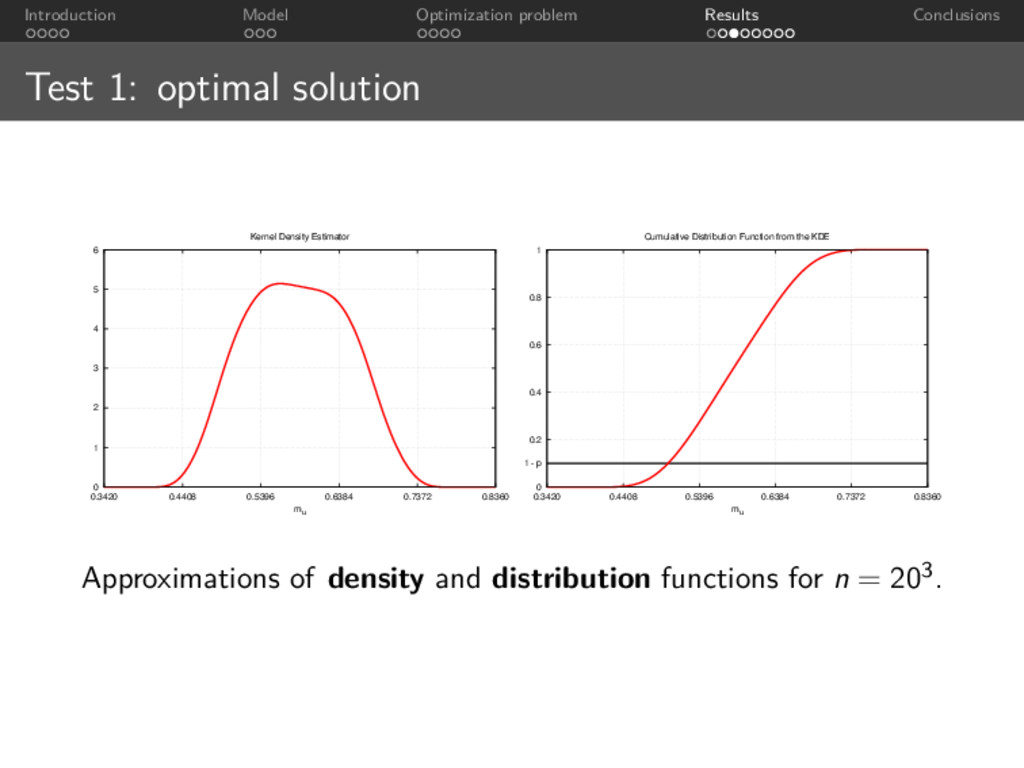
0 1 2 3 4 5 6 0.3420 0.4408 0.5396 0.6384 0.7372 0.8360 mu Kernel Density Estimator 0 0.2 0.4 0.6 0.8 1 0.3420 0.4408 0.5396 0.6384 0.7372 0.8360 mu Cumulative Distribution Function from the KDE 1 - p Approximations of density and distribution functions for n = 203.
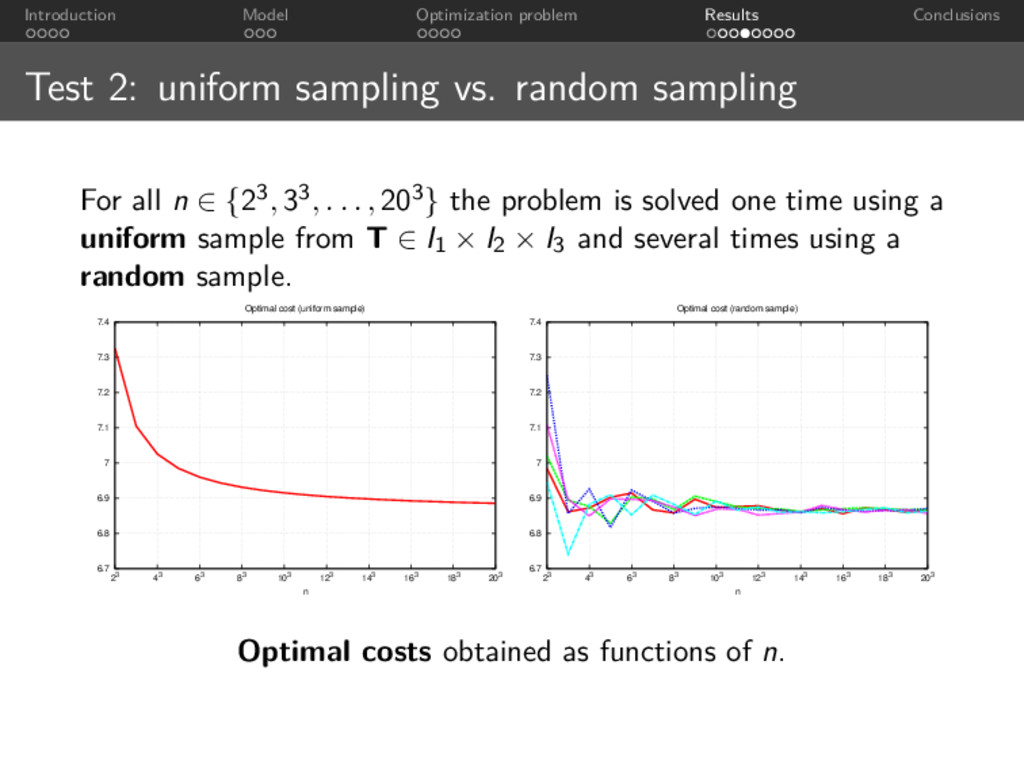
vs. random sampling For all n ∈ {23, 33, . . . , 203} the problem is solved one time using a uniform sample from T ∈ I1 × I2 × I3 and several times using a random sample. 6.7 6.8 6.9 7 7.1 7.2 7.3 7.4 23 43 63 83 103 123 143 163 183 203 n Optimal cost (uniform sample) 6.7 6.8 6.9 7 7.1 7.2 7.3 7.4 23 43 63 83 103 123 143 163 183 203 n Optimal cost (random sample) Optimal costs obtained as functions of n.
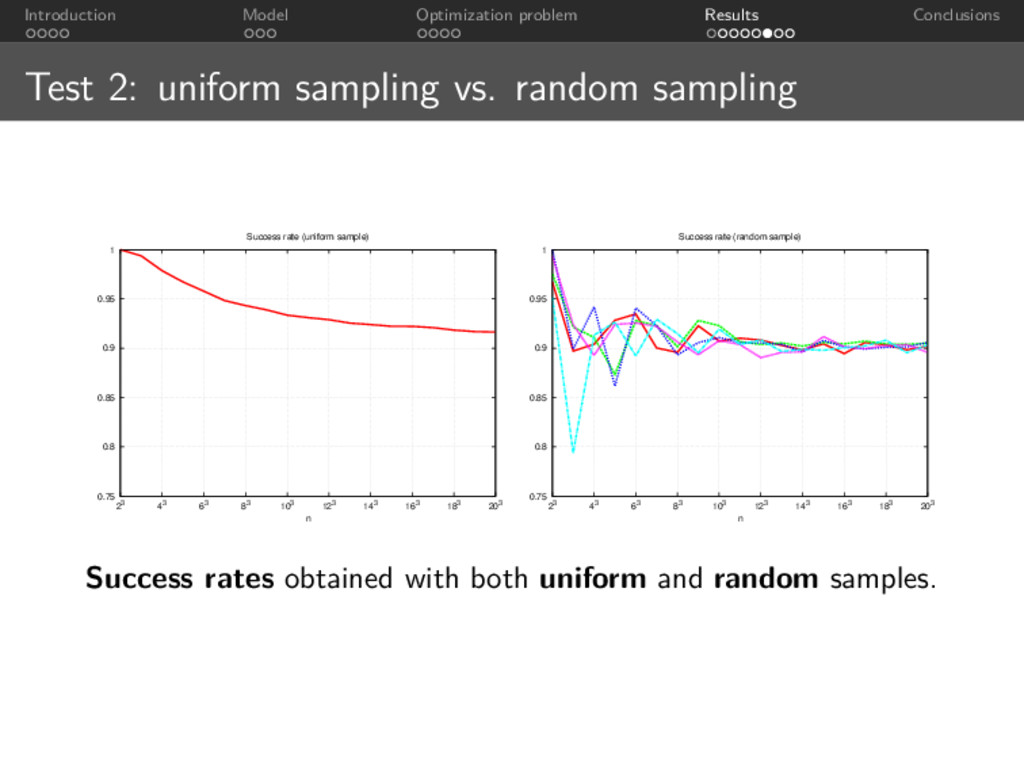
vs. random sampling Let mn e be the optimal solution obtained with a sample of size n. In order to estimate P Mu(T, mn e ) ≥ mu we evaluate Mu(T, mn e ) at 105 random values of T, then define Rn := # Ti | Mu(Ti , mn e ) ≥ mu 105 and use the fact that Rn ≈ P Mu(T, mn e ) ≥ mu
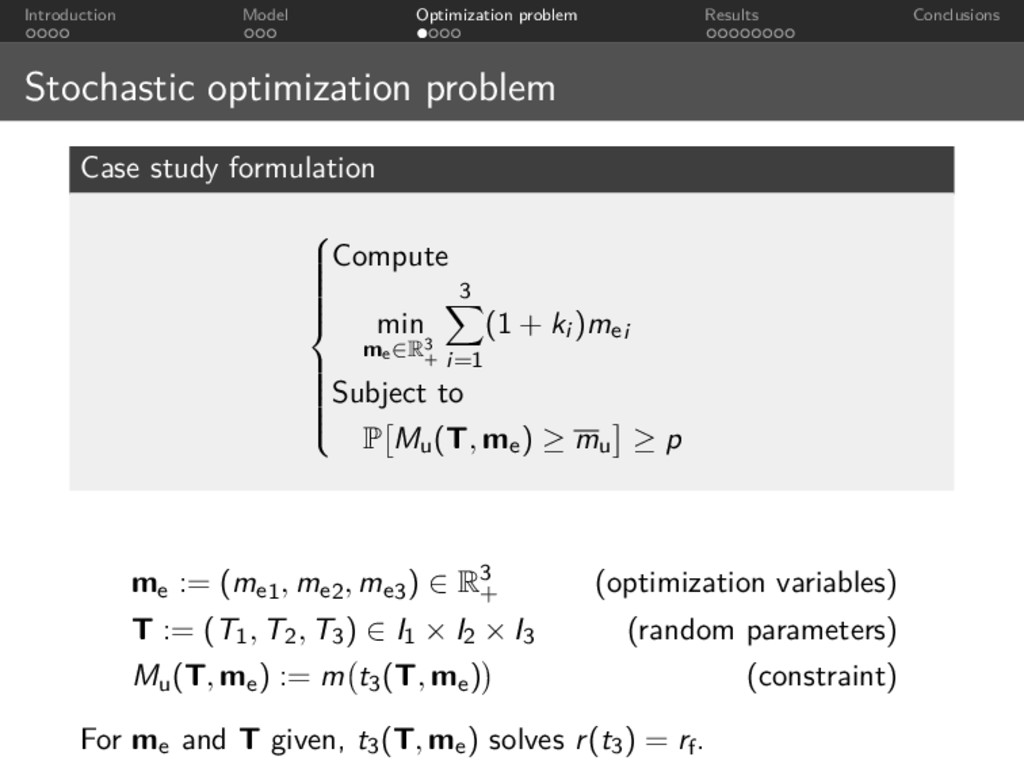
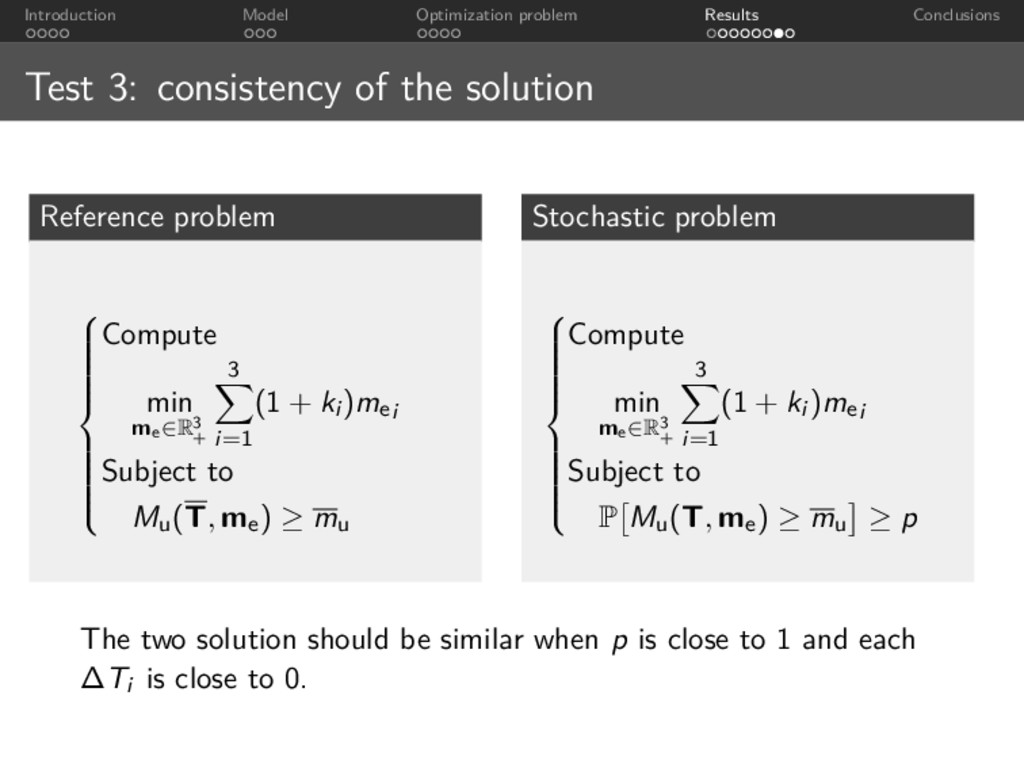
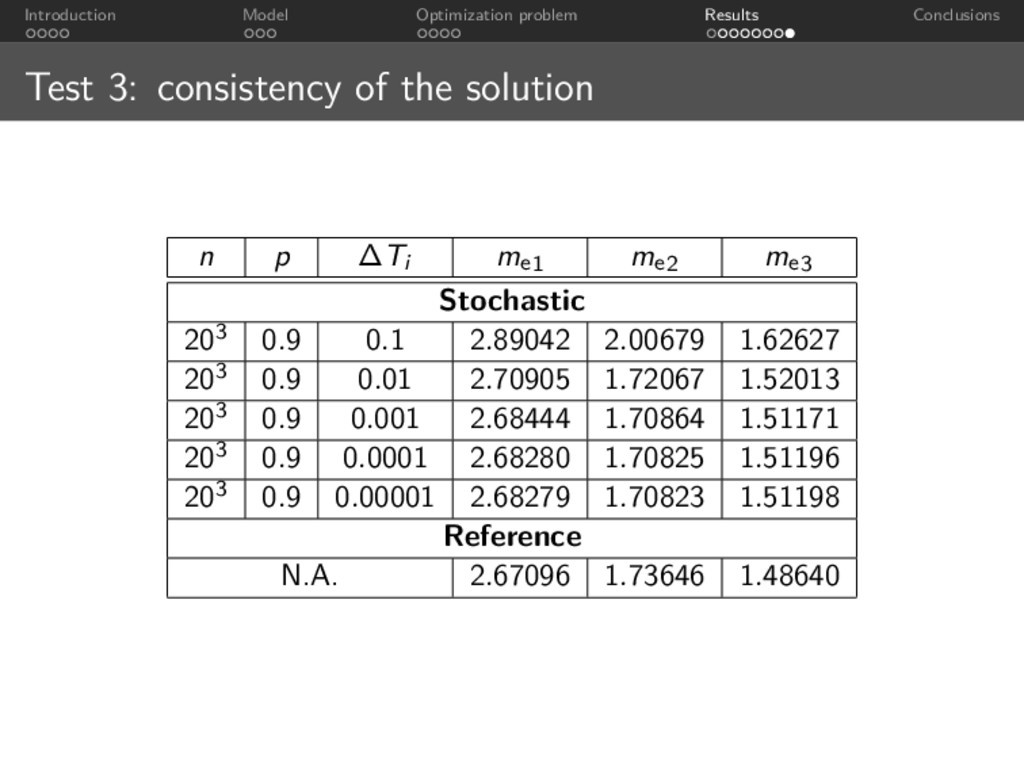
the solution Reference problem Compute min me∈R3 + 3 i=1 (1 + ki )mei Subject to Mu(T, me) ≥ mu Stochastic problem Compute min me∈R3 + 3 i=1 (1 + ki )mei Subject to P Mu(T, me) ≥ mu ≥ p The two solution should be similar when p is close to 1 and each ∆Ti is close to 0.
samples lead to good approximations of f . Better results can be obtained with different h and K. Cons: Lack of theory: no explicit formula for the error between f and ˆ f . No general criterion for choosing h and K. Future work: More complex problems: apply this technique to optimal control problems. More random variables: use realistic models with an increasing number of uncertain parameters.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}