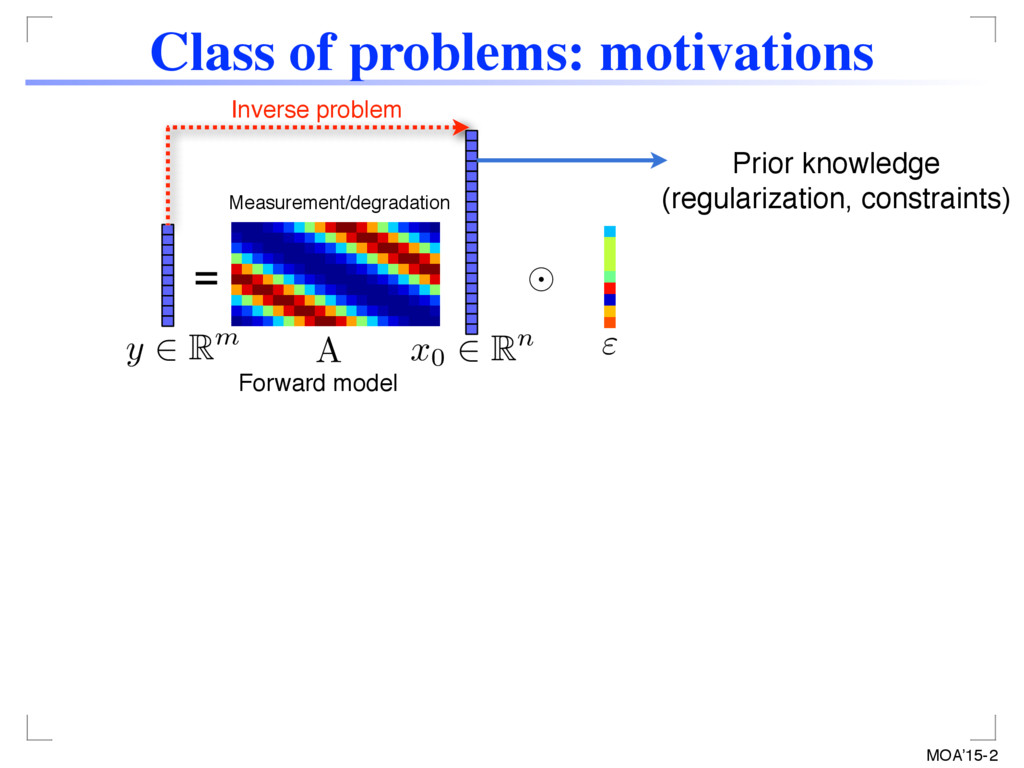
× 1 L × 1 m × 1 m × n n × L Dictionary Sensing } A " Measurement/degradation x y H n × 1 m × 1 m × n n × L Dictionary Sensing } x y H n × 1 m × 1 m × n n × L Dictionary Sensing } Inverse problem Prior knowledge (regularization, constraints) y 2 Rm x0 2 Rn Forward model
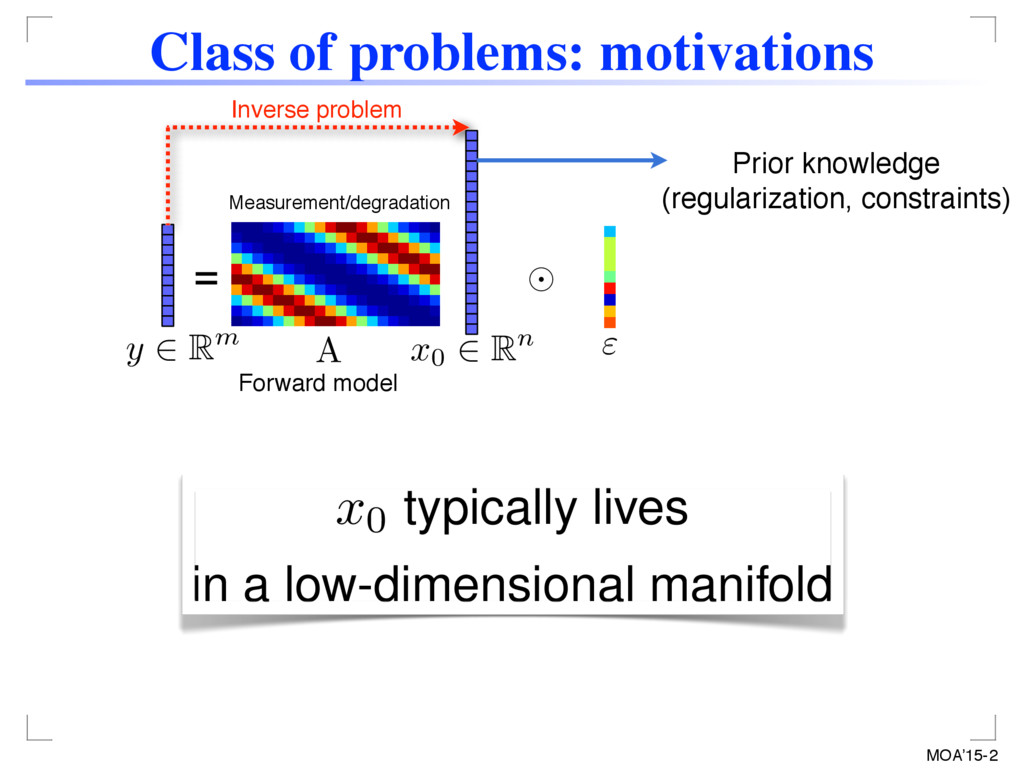
× 1 L × 1 m × 1 m × n n × L Dictionary Sensing } A " Measurement/degradation x y H n × 1 m × 1 m × n n × L Dictionary Sensing } x y H n × 1 m × 1 m × n n × L Dictionary Sensing } Inverse problem Prior knowledge (regularization, constraints) x0 typically lives in a low-dimensional manifold y 2 Rm x0 2 Rn Forward model
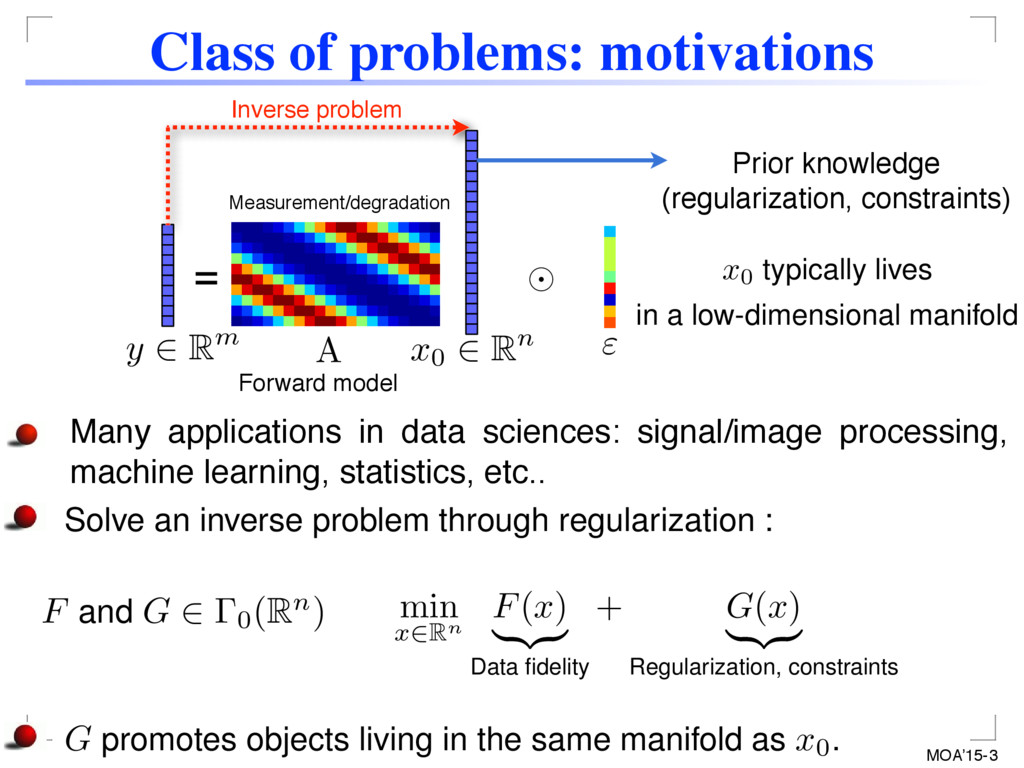
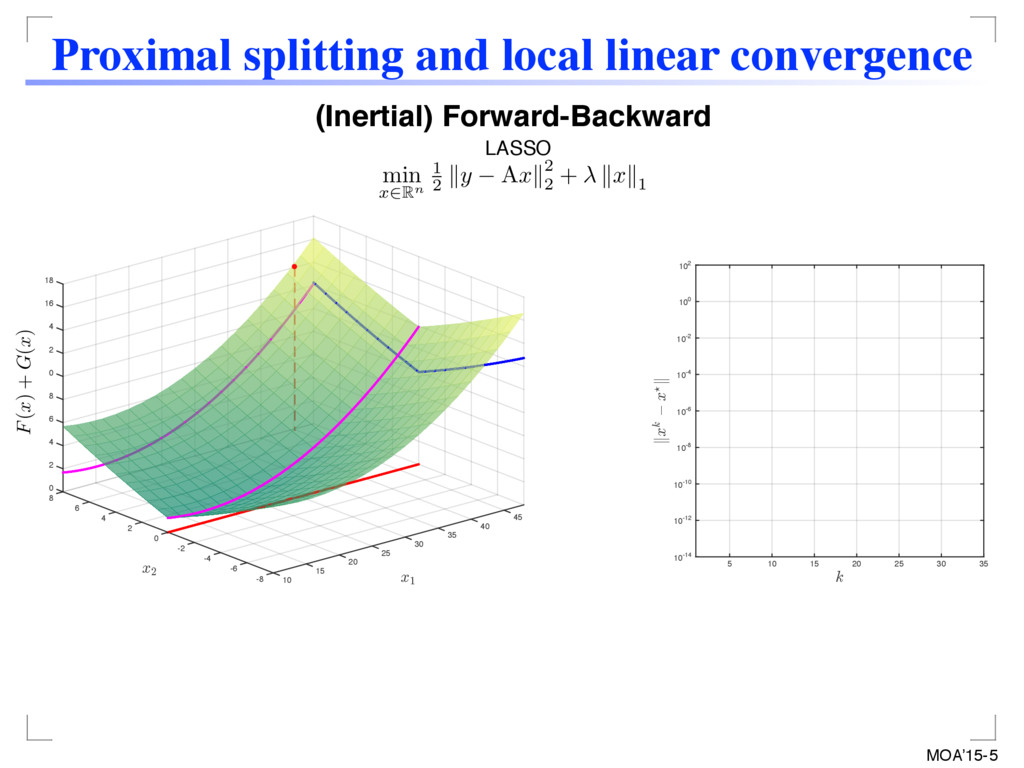
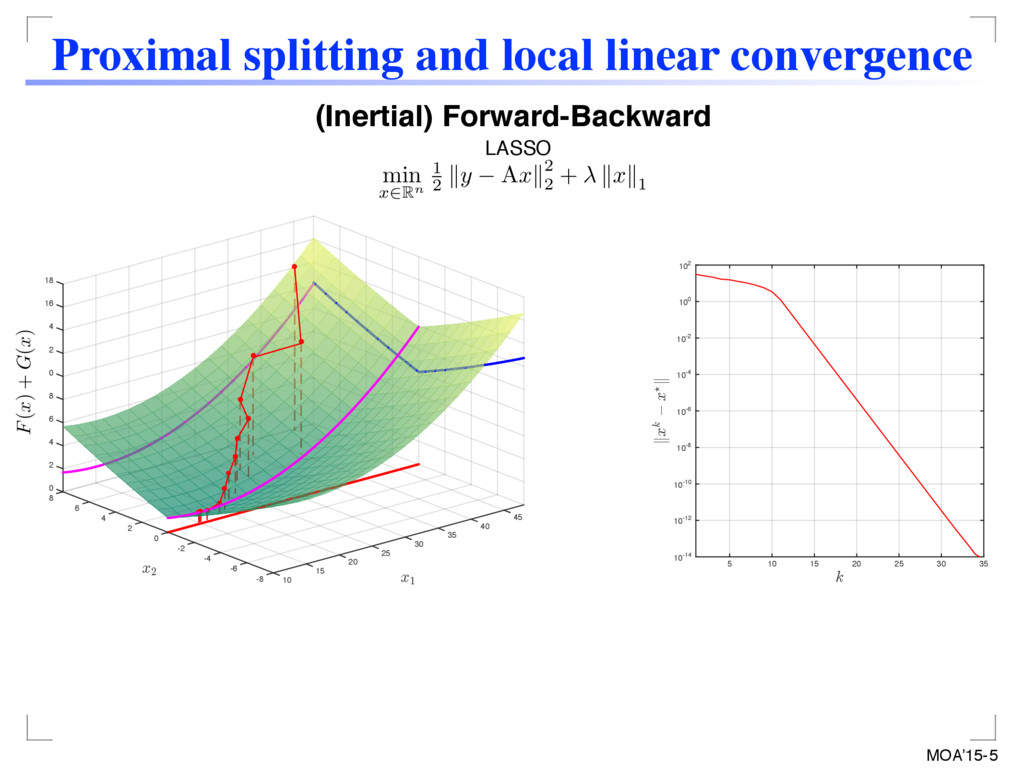
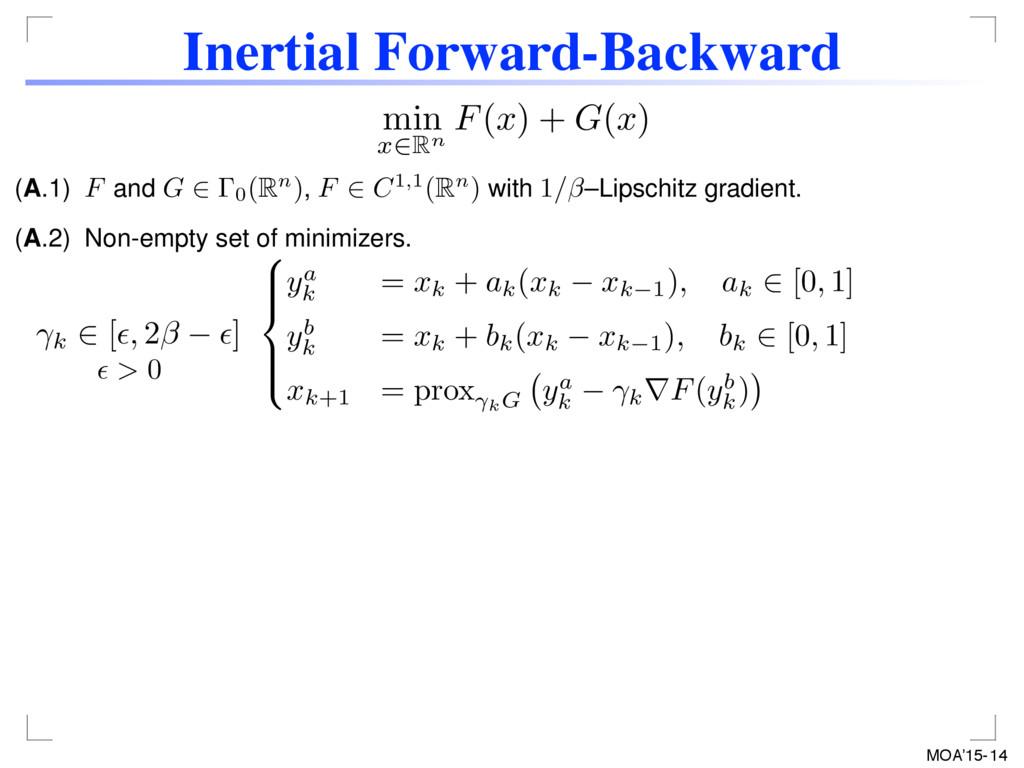
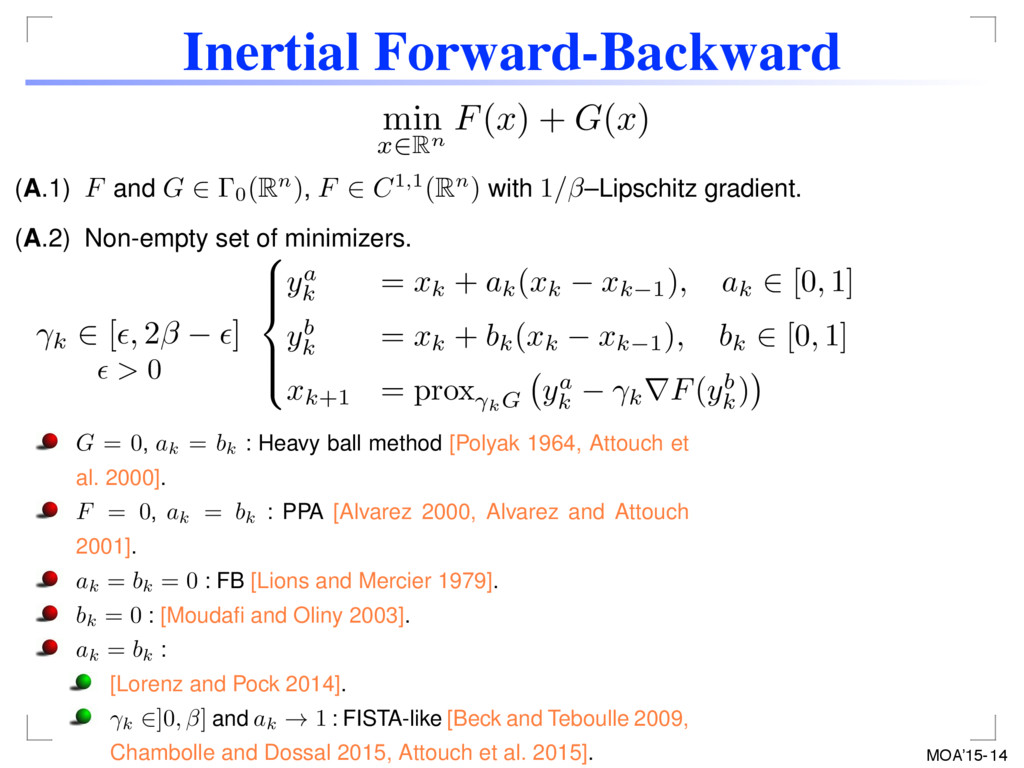
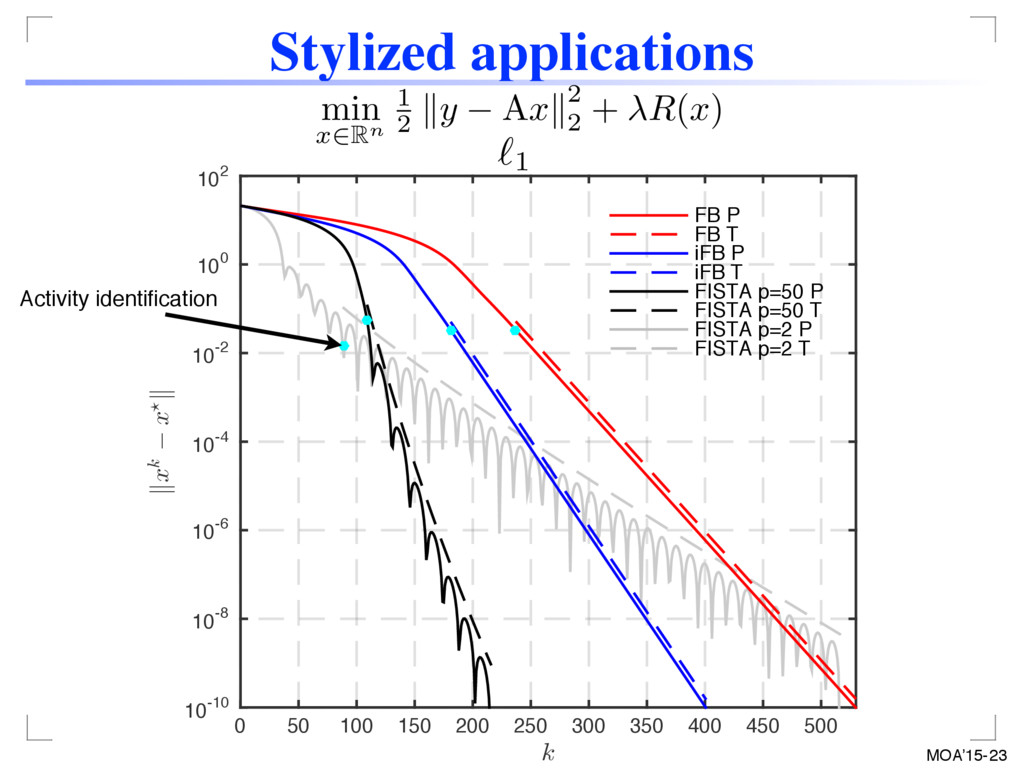
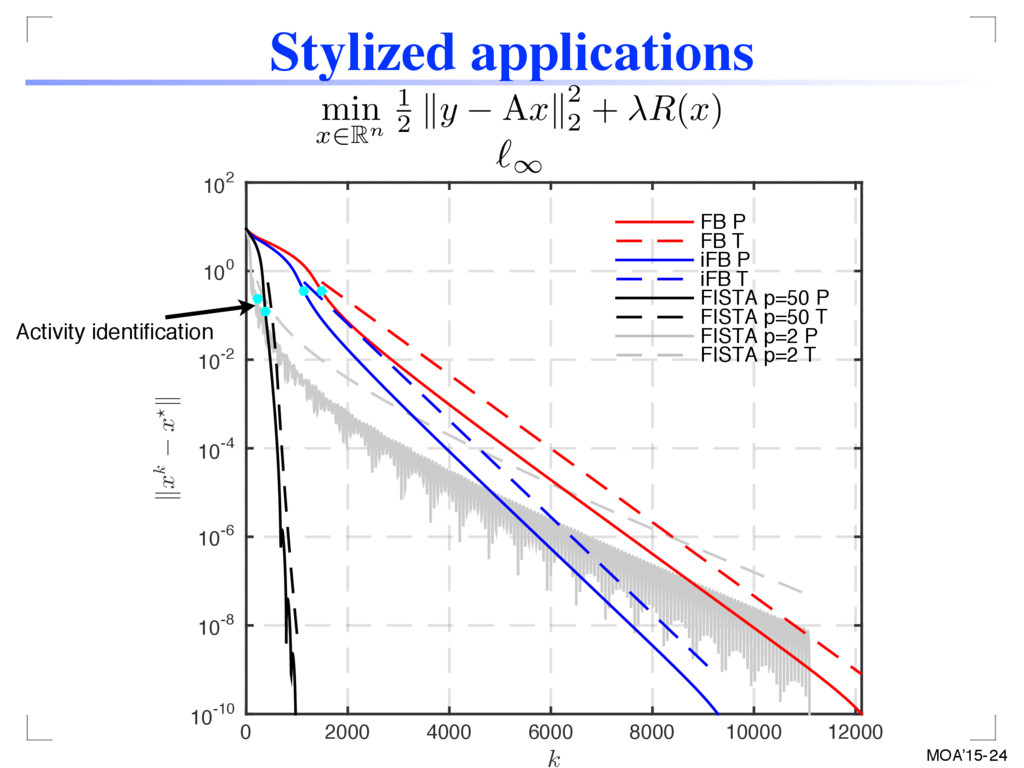
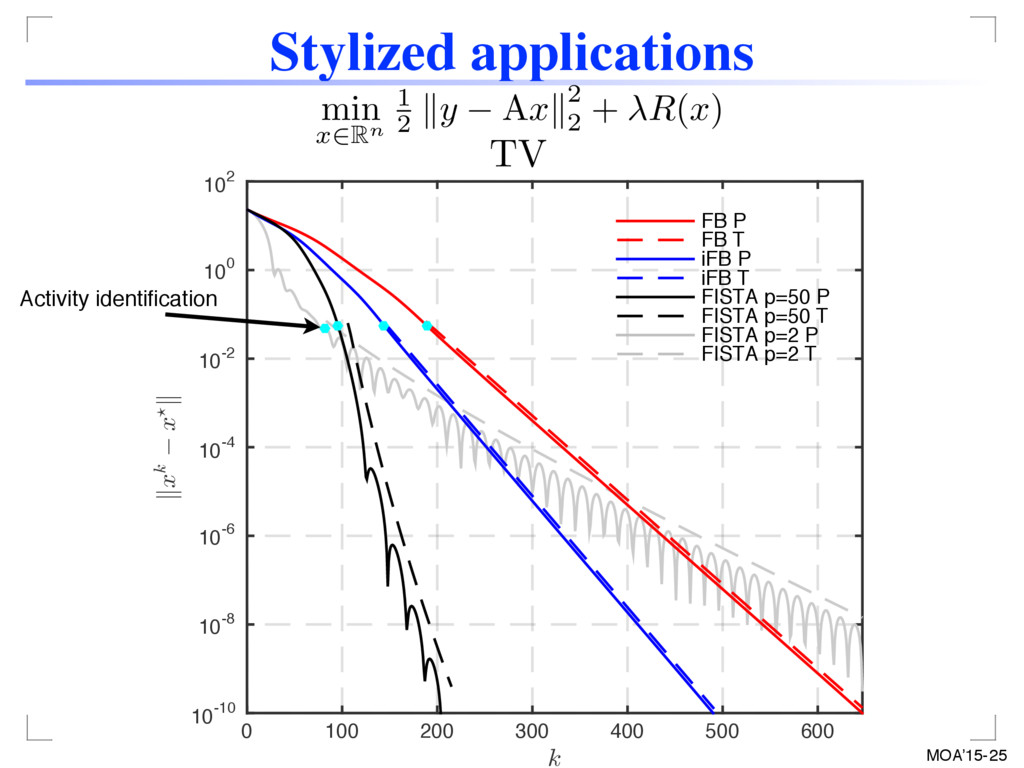
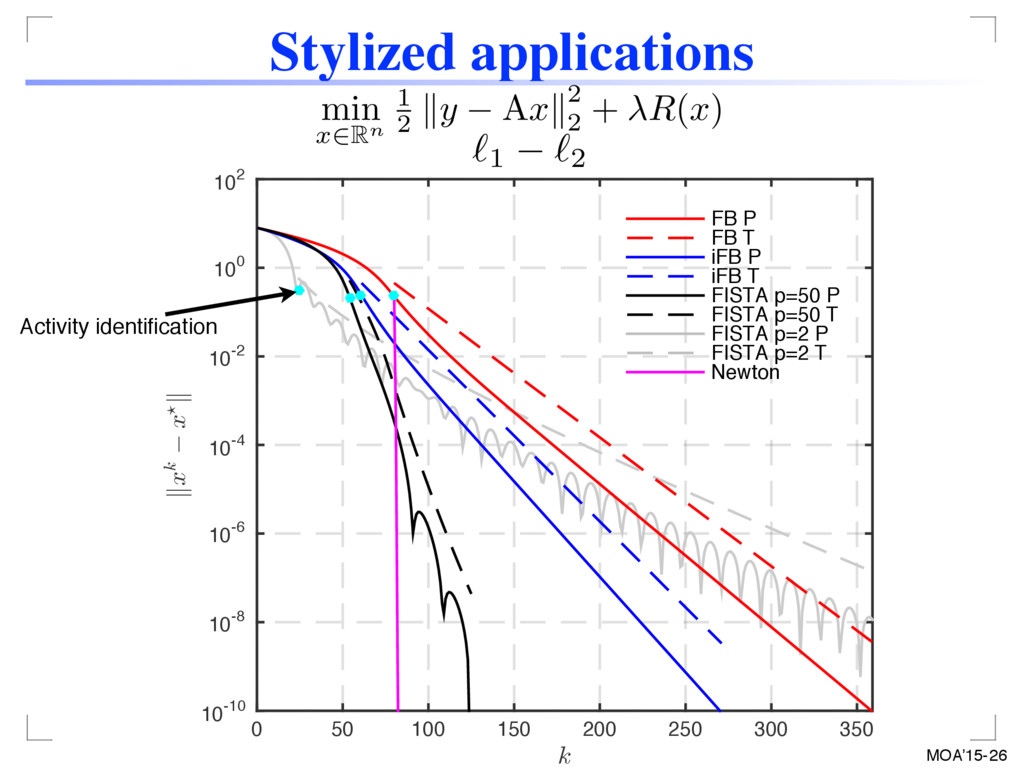
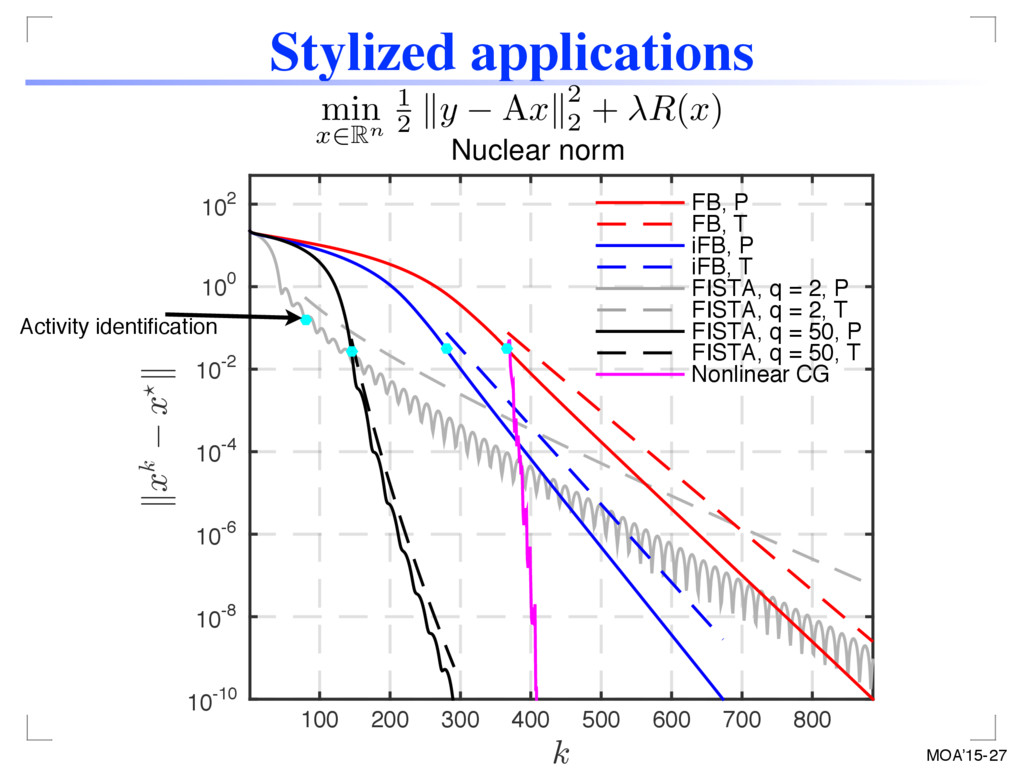
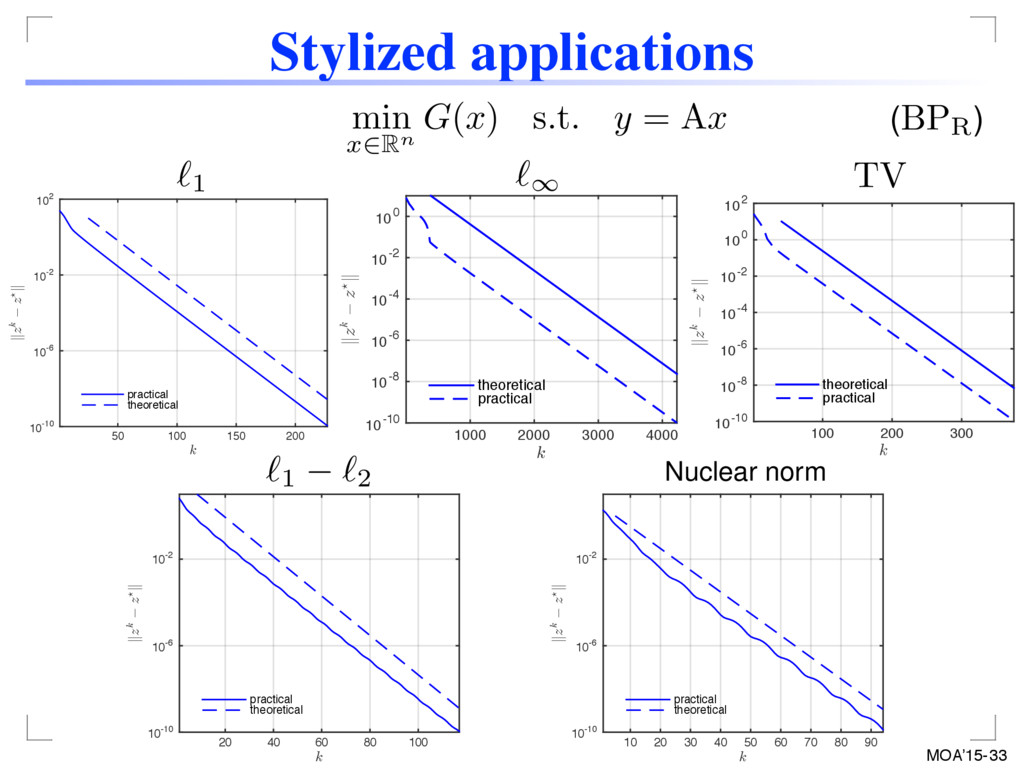
× 1 L × 1 m × 1 m × n n × L Dictionary Sensing } A " Measurement/degradation x y H n × 1 m × 1 m × n n × L Dictionary Sensing } x y H n × 1 m × 1 m × n n × L Dictionary Sensing } Inverse problem Forward model Prior knowledge (regularization, constraints) Many applications in data sciences: signal/image processing, machine learning, statistics, etc.. x0 typically lives in a low-dimensional manifold y 2 Rm x0 2 Rn Solve an inverse problem through regularization : min x 2Rn F ( x ) | {z } Data fidelity + G ( x ) | {z } Regularization, constraints G promotes objects living in the same manifold as x0. F and G 2 0 (Rn)
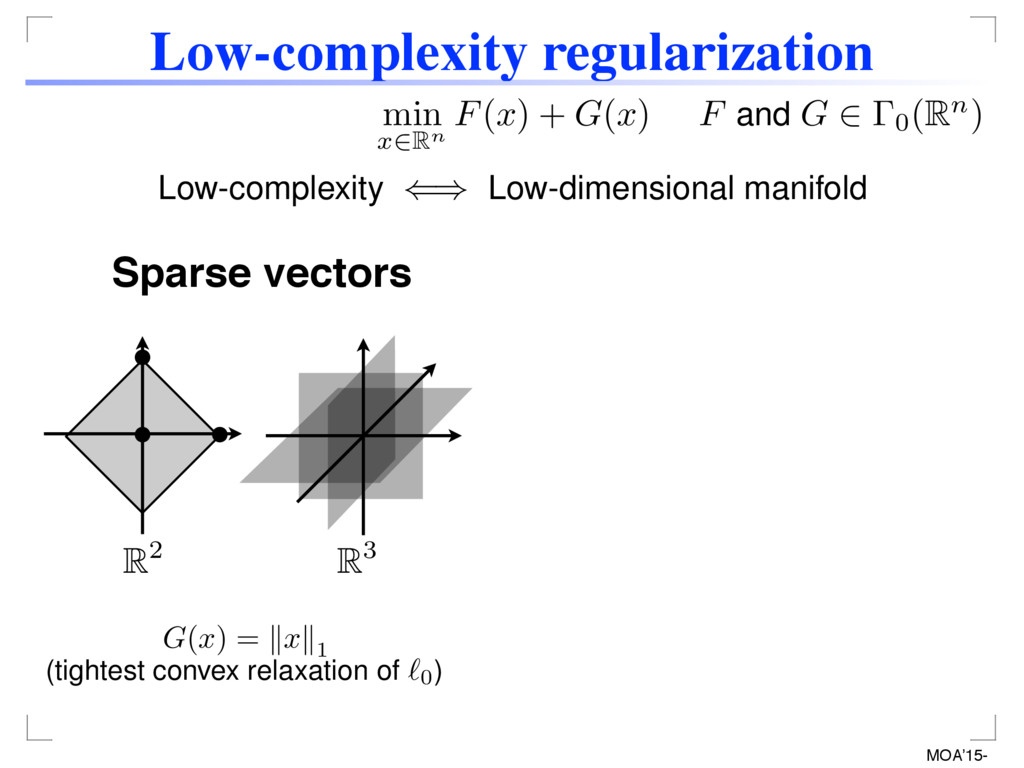
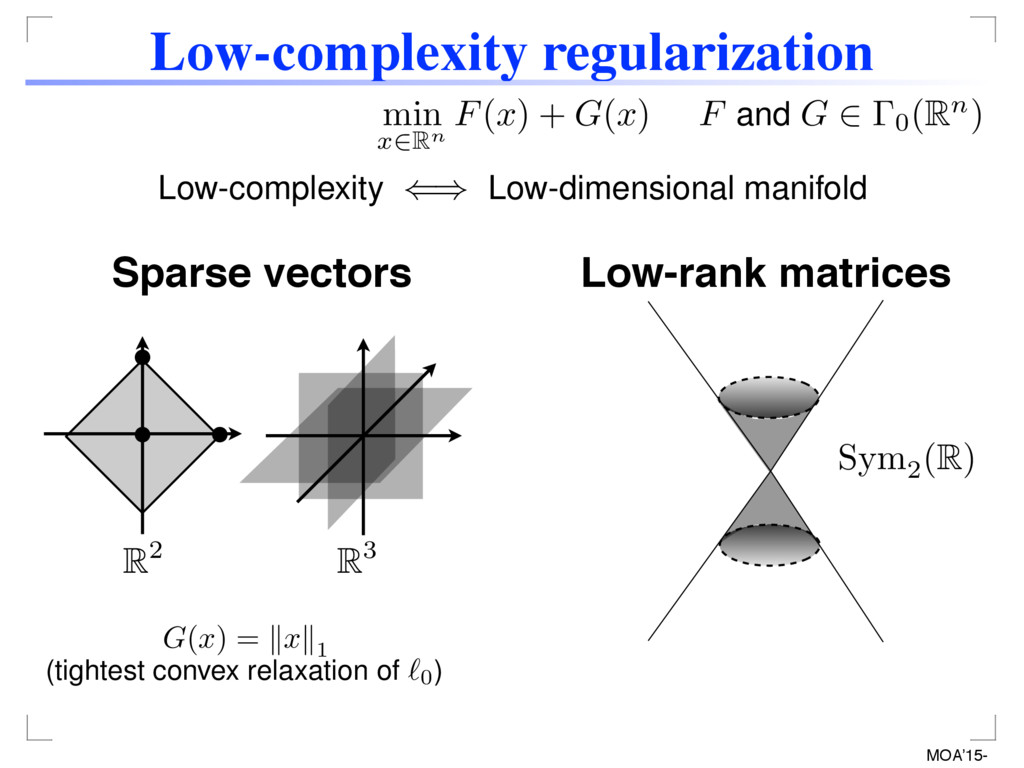
+ G ( x ) Low-complexity () Low-dimensional manifold Sparse vectors G ( x ) = k x k 1 (tightest convex relaxation of `0) Low-rank matrices R2 R3 Sym 2 (R) F and G 2 0 (Rn)
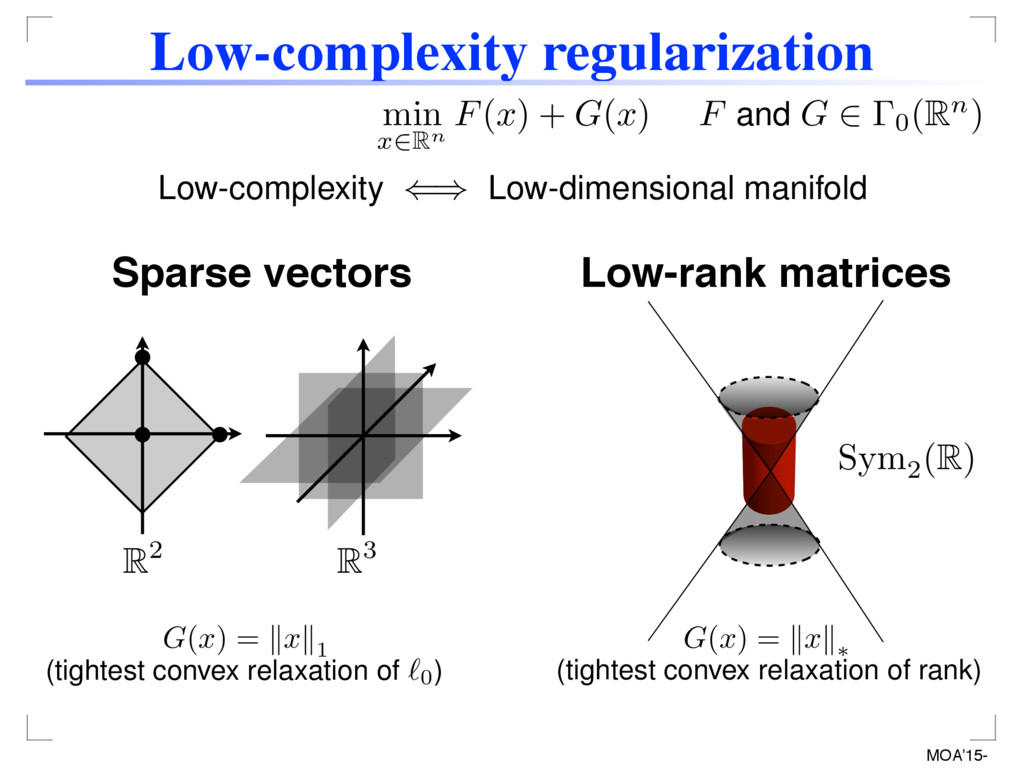
+ G ( x ) Low-complexity () Low-dimensional manifold Sparse vectors G ( x ) = k x k 1 (tightest convex relaxation of `0) Low-rank matrices G ( x ) = k x k ⇤ (tightest convex relaxation of rank) R2 R3 Sym 2 (R) F and G 2 0 (Rn)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}