Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
動かすプログラミング/PEES-michijun
Search
Naoki Kato
PRO
May 25, 2021
Education
57
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
動かすプログラミング/PEES-michijun
東京学芸大学教育学部共通SE科目
小学校におけるプログラミング教育
動かすプログラミング
Naoki Kato
PRO
May 25, 2021
More Decks by Naoki Kato
See All by Naoki Kato
ICTを使った授業アップデートについて(次期学習指導要領への助走)
naokikato
PRO
0
14
E類入門セミナー:情報セキュリティと情報倫理
naokikato
PRO
0
54
学習者用デジタル教科書の活用
naokikato
PRO
0
94
子どもが自立した学習者となるデジタルの活用について
naokikato
PRO
0
230
高校におけるプログラミング教育を考える
naokikato
PRO
0
240
デジタル教科書研究の今
naokikato
PRO
0
63
デジタル教科書の現在地と今後の展望
naokikato
PRO
0
130
複数カメラ活用による授業の遠隔参観や収録コンテンツ開発の促進
naokikato
PRO
0
120
教育DXの推進に向けて
naokikato
PRO
0
78
Other Decks in Education
See All in Education
0506
cbtlibrary
0
220
Case Studies - Lecture 12 - Information Visualisation (4019538FNR)
signer
PRO
0
180
[2026前期火5] 論理学(京都大学文学部 前期 第2回)「論理的な正しさはどこにあるのか」
yatabe
0
1k
0513
cbtlibrary
0
220
吉祥寺.pmは1つじゃない — 複数イベント並走運営の12年 —
magnolia
0
1.3k
Course Review - Lecture 13 - Next Generation User Interfaces (4018166FNR)
signer
PRO
0
2.3k
[2026前期火5] 論理学(京都大学文学部 前期 第5回)「 ならばの問題演習・proof net・かつの規則」
yatabe
0
360
参加制約理論
roadofhope
0
140
AI時代に、 なぜ英語を勉強するのか
empelt
0
130
Where Data Meets Storytelling
georgesinnott
0
130
From Days to Minutes: How We Taught an AI to Onboard 50+ Tenants on our AI Features
mfcabrera
0
210
BITCOIN : Les fondamentaux !
rlifchitz
0
200
Featured
See All Featured
Easily Structure & Communicate Ideas using Wireframe
afnizarnur
194
17k
Put a Button on it: Removing Barriers to Going Fast.
kastner
60
4.4k
SEO for Brand Visibility & Recognition
aleyda
0
4.6k
Bioeconomy Workshop: Dr. Julius Ecuru, Opportunities for a Bioeconomy in West Africa
akademiya2063
PRO
1
180
The State of eCommerce SEO: How to Win in Today's Products SERPs - #SEOweek
aleyda
2
11k
Test your architecture with Archunit
thirion
1
2.3k
Site-Speed That Sticks
csswizardry
13
1.3k
The Curious Case for Waylosing
cassininazir
1
430
Pawsitive SEO: Lessons from My Dog (and Many Mistakes) on Thriving as a Consultant in the Age of AI
davidcarrasco
0
190
The browser strikes back
jonoalderson
0
1.4k
Done Done
chrislema
186
16k
GraphQLの誤解/rethinking-graphql
sonatard
75
12k
Transcript
©2016- Naoki Kato, IML at TGU 共通SE科目 東 東京 京学
学芸 芸大 大学 学 I IC CT Tセ セン ンタ ター ー 教 教育 育情 情報 報化 化研 研究 究チ チー ーム ム 加 加藤 藤直 直樹 樹 Programming Education in Elementary School 小学校における プログラミング教育 動かすプログラミング
©2016- Naoki Kato, IML at TGU 道順プログラミング 動かすプログラミング
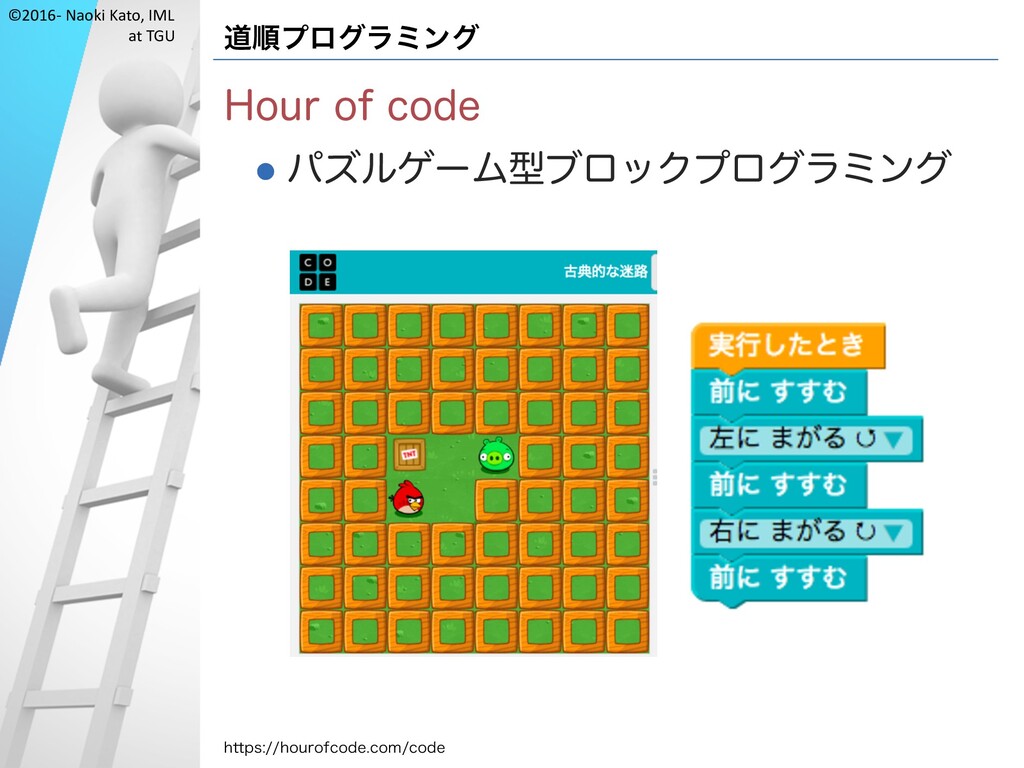
©2016- Naoki Kato, IML at TGU 道順プログラミング Hour of code
l パズルゲーム型ブロックプログラミング https://hourofcode.com/code
©2016- Naoki Kato, IML at TGU 道順プログラミング タンジブルプログラミング 左上写真:プログラミングロボ コード・A・ピラー
https://www.coporii.com/?pid=113251915 右上写真:プログラミングロボット True true https://www.kenis.co.jp/truetrue/index.html 下左写真:GIZMODO https://www.gizmodo.jp/2016/03/3cubetto.html 下右写真:プログラミング+ https://ascii.jp/elem/000/001/265/1265712/
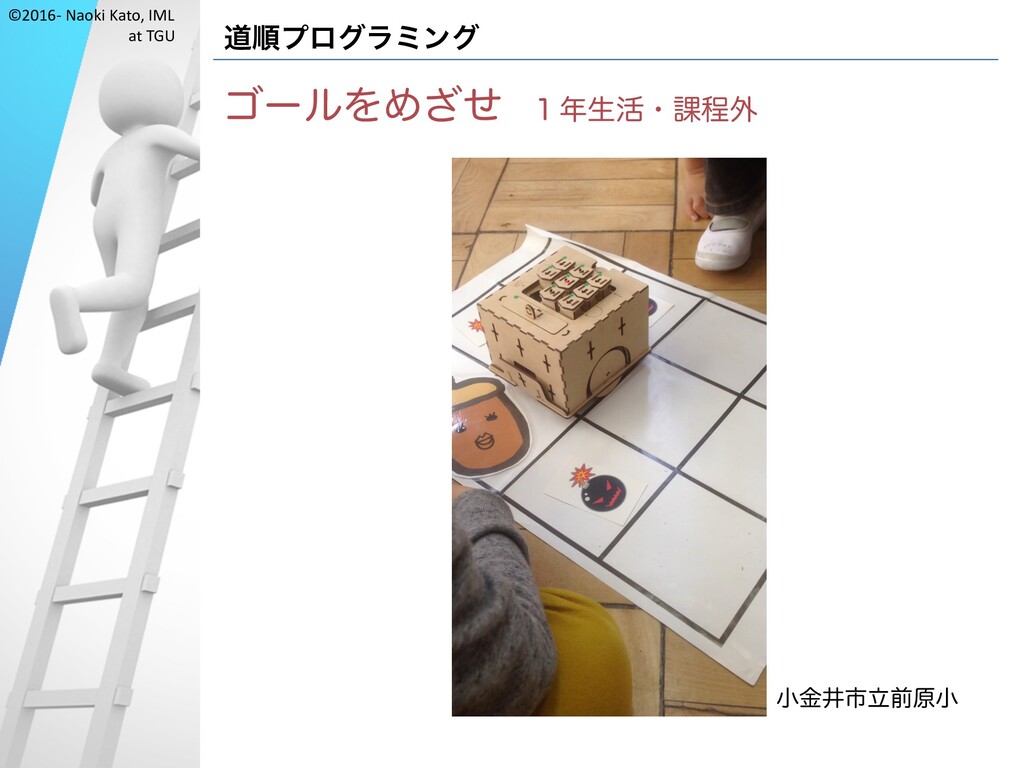
©2016- Naoki Kato, IML at TGU 道順プログラミング ゴールをめざせ 1年生活・課程外 小金井市立前原小
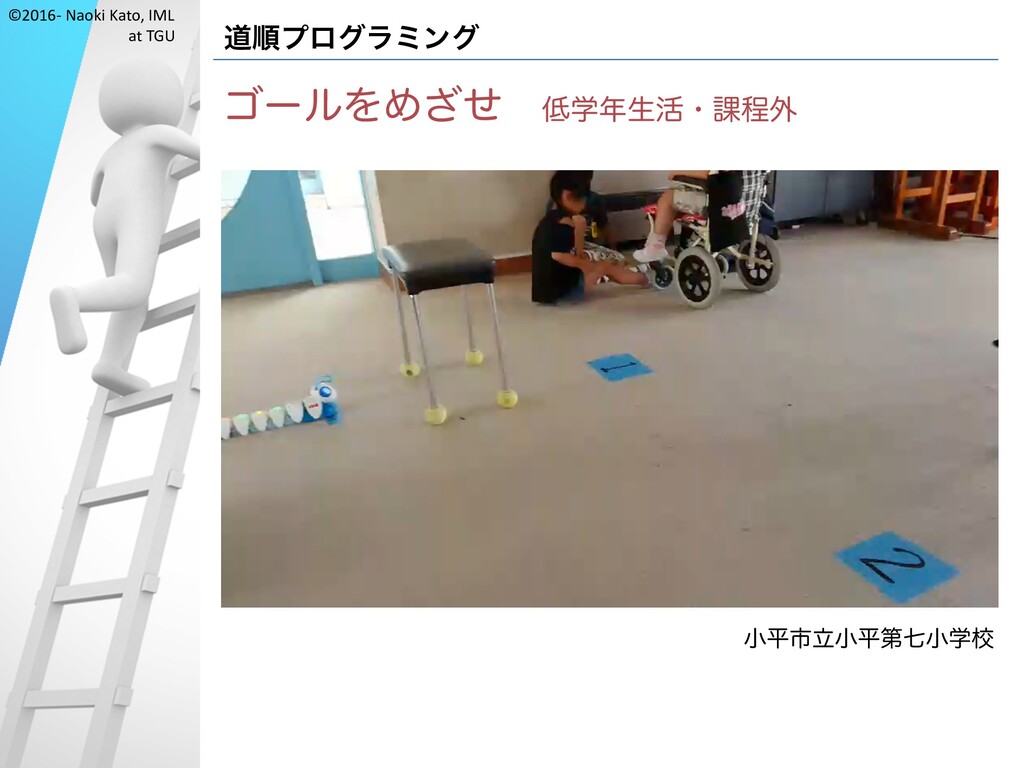
©2016- Naoki Kato, IML at TGU 道順プログラミング ゴールをめざせ 低学年生活・課程外 小平市立小平第七小学校
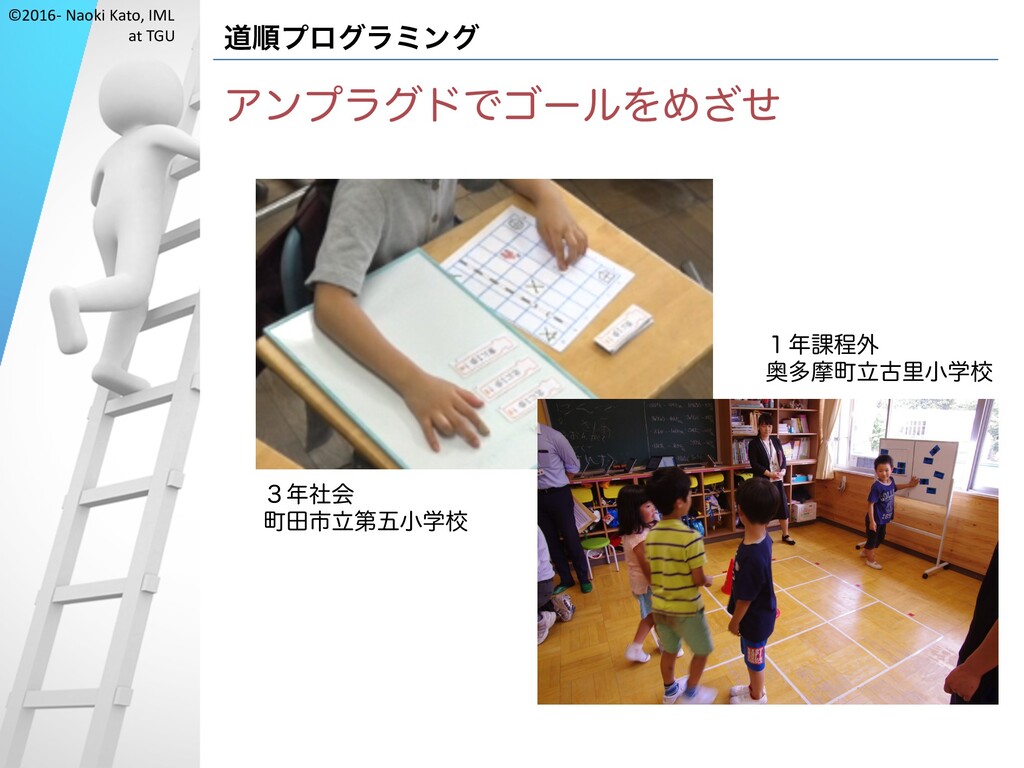
©2016- Naoki Kato, IML at TGU 道順プログラミング アンプラグドでゴールをめざせ 3年社会 町田市立第五小学校
1年課程外 奥多摩町立古里小学校
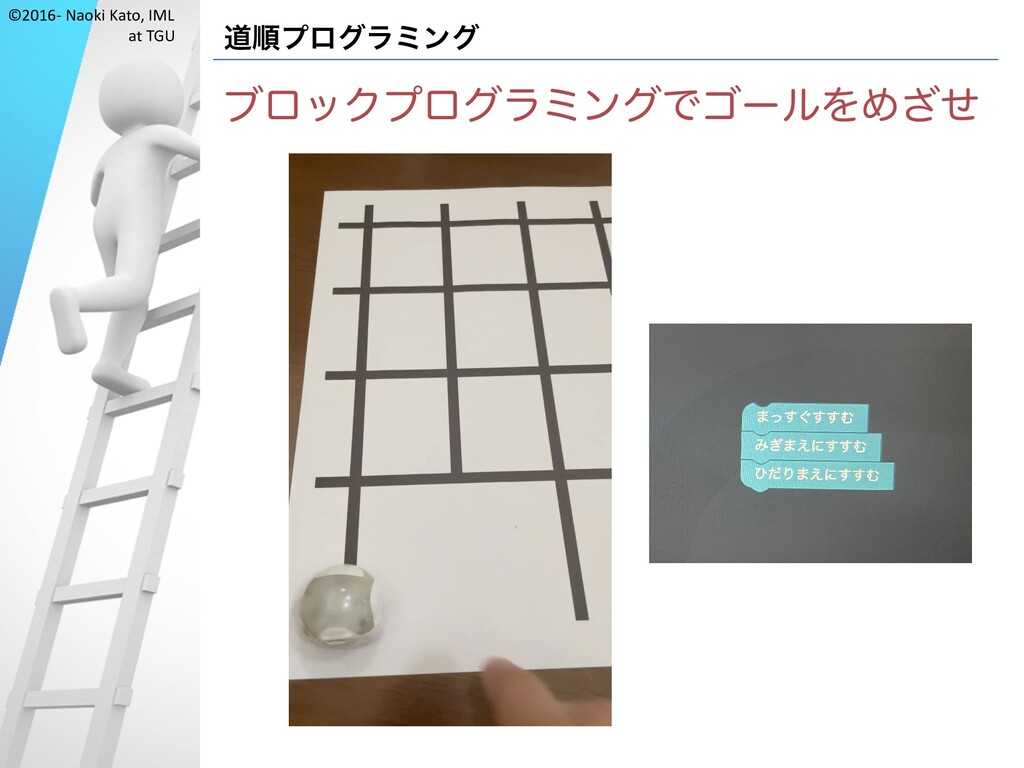
©2016- Naoki Kato, IML at TGU 道順プログラミング ブロックプログラミングでゴールをめざせ
©2016- Naoki Kato, IML at TGU たかが道順されど道順
©2016- Naoki Kato, IML at TGU 道順プログラミング ゴールをめざせにチャレンジ l https://scratch.mit.edu/projects/5325
28469 l https://scratch.mit.edu/projects/5325 29418 l https://scratch.mit.edu/projects/5316 21933
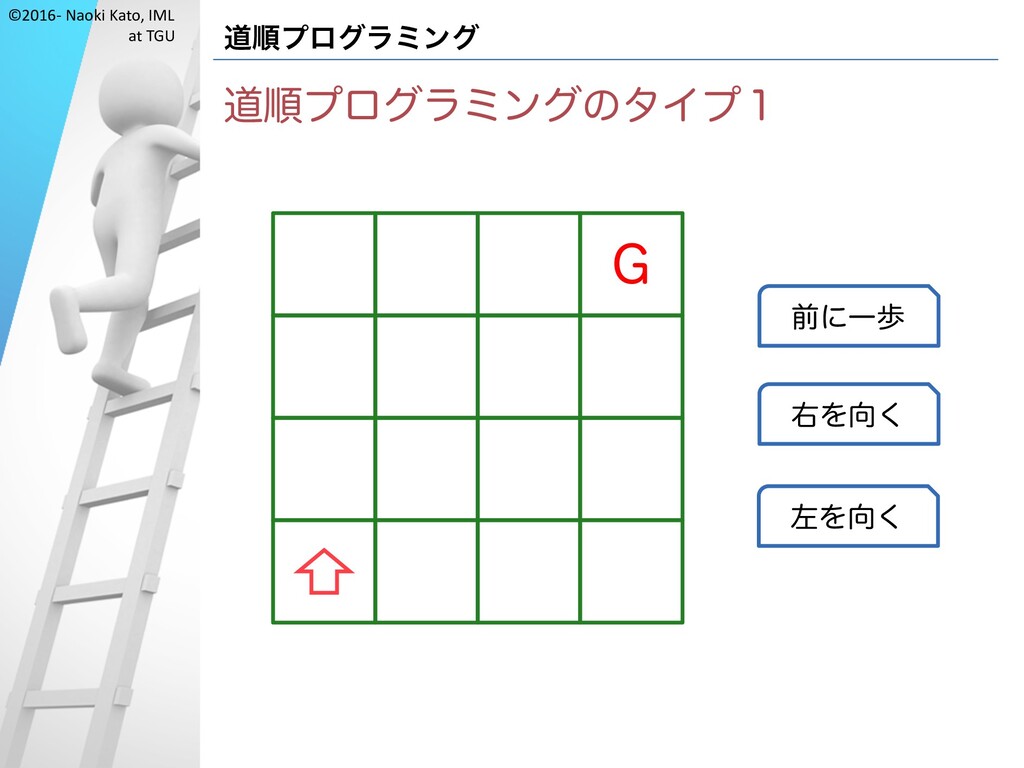
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのタイプ1 G 前に一歩
右を向く 左を向く
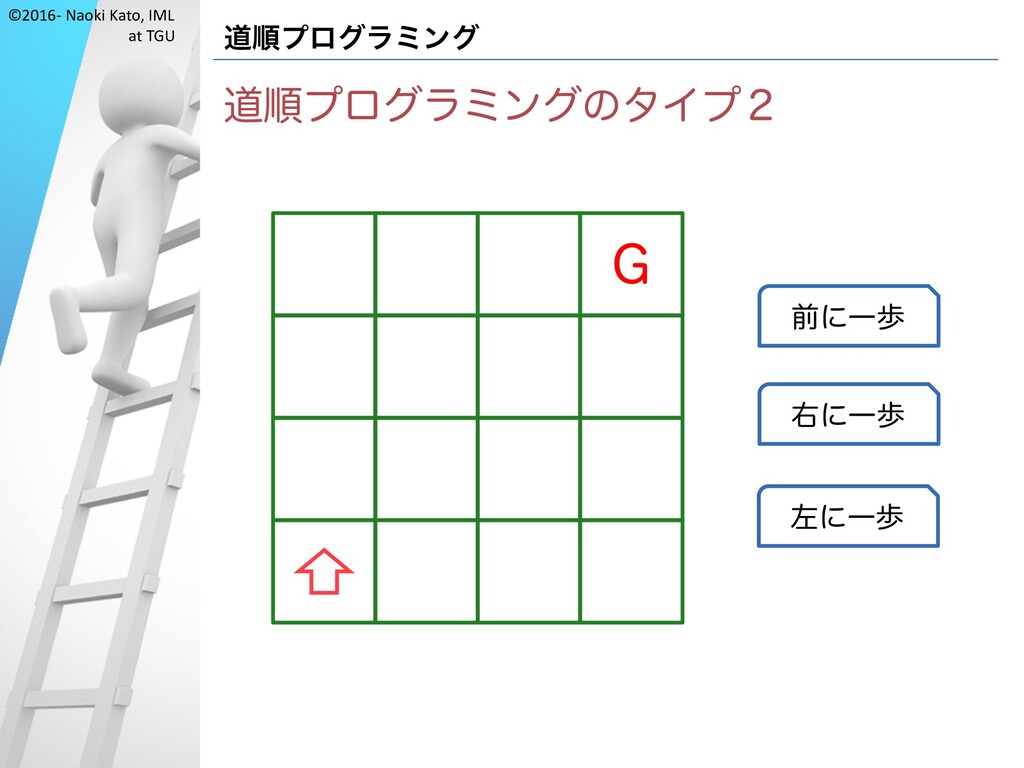
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのタイプ2 G 前に一歩
右に一歩 左に一歩
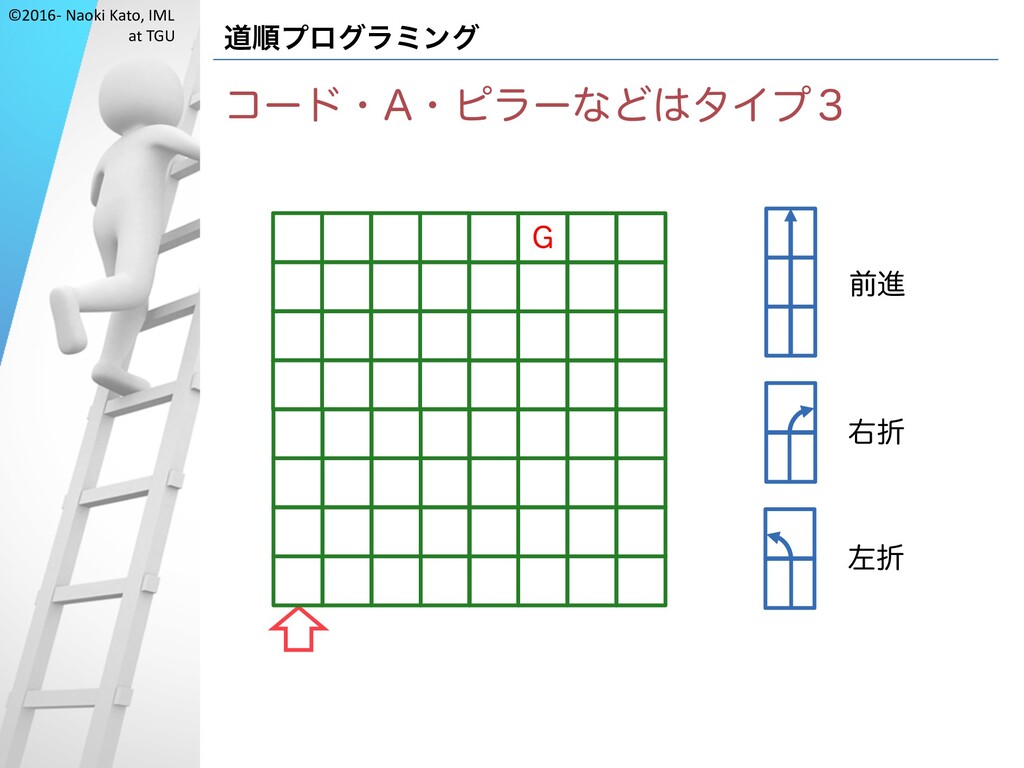
©2016- Naoki Kato, IML at TGU 道順プログラミング コード・A・ピラーなどはタイプ3 G 前進
右折 左折
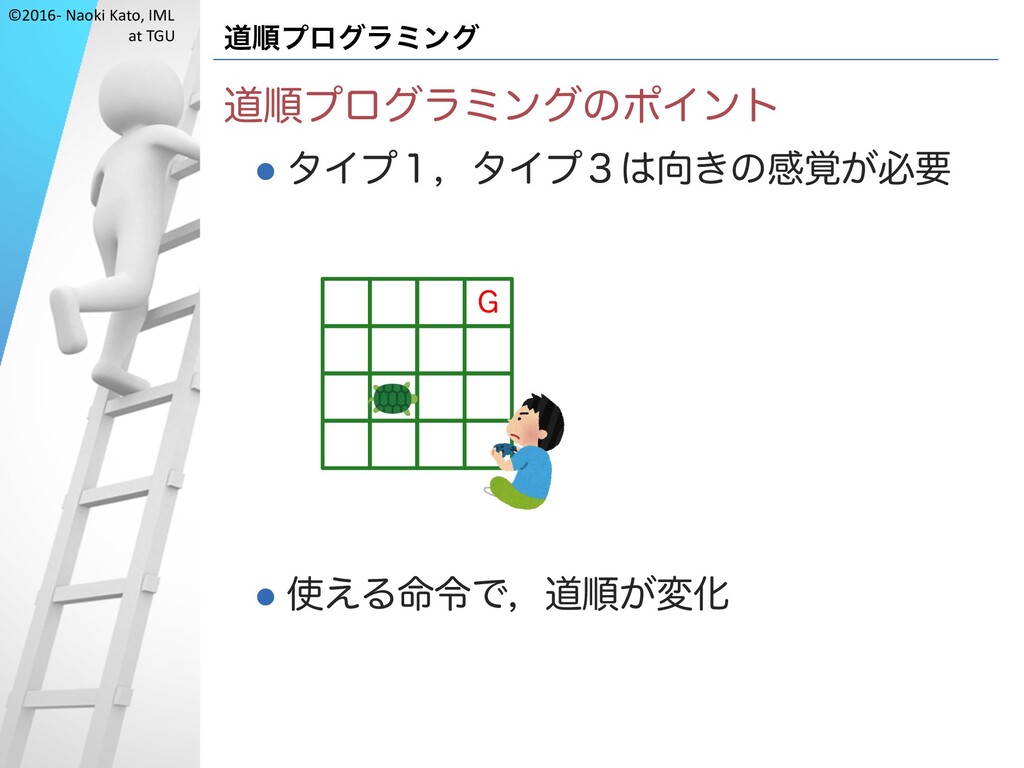
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのポイント l タイプ1,タイプ3は向きの感覚が必要
l 使える命令で,道順が変化 G
©2016- Naoki Kato, IML at TGU うまくいく道順プログラミング
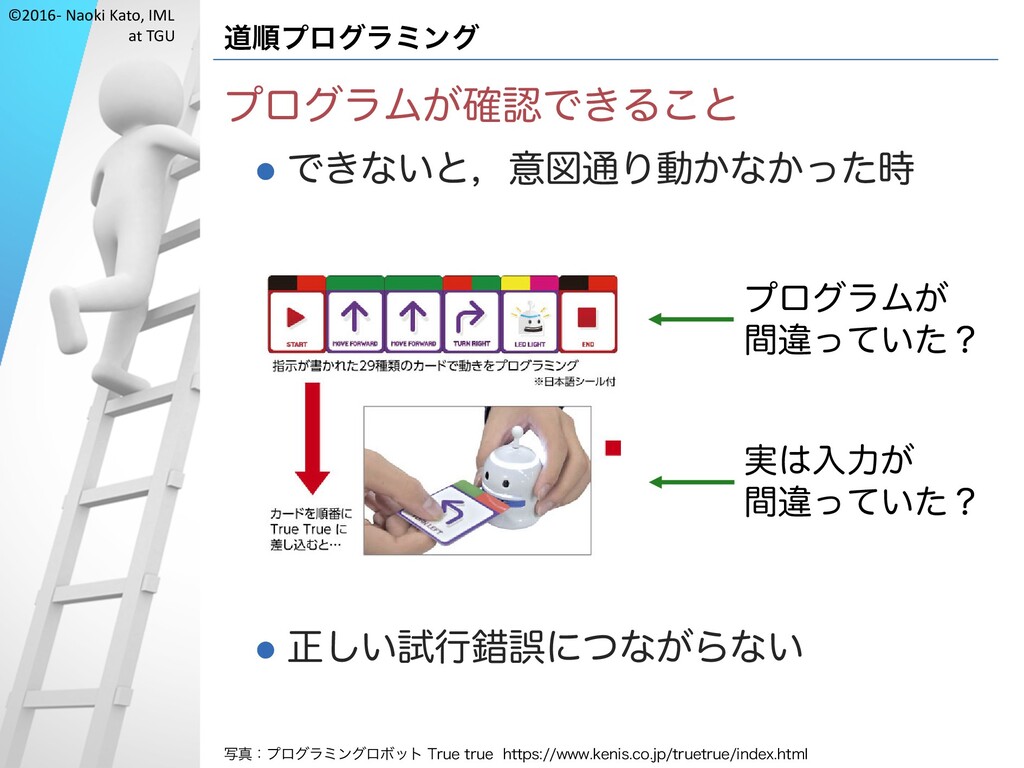
©2016- Naoki Kato, IML at TGU 道順プログラミング プログラムが確認できること l できないと,意図通り動かなかった時
l 正しい試行錯誤につながらない 写真:プログラミングロボット True true https://www.kenis.co.jp/truetrue/index.html プログラムが 間違っていた? 実は入力が 間違っていた?
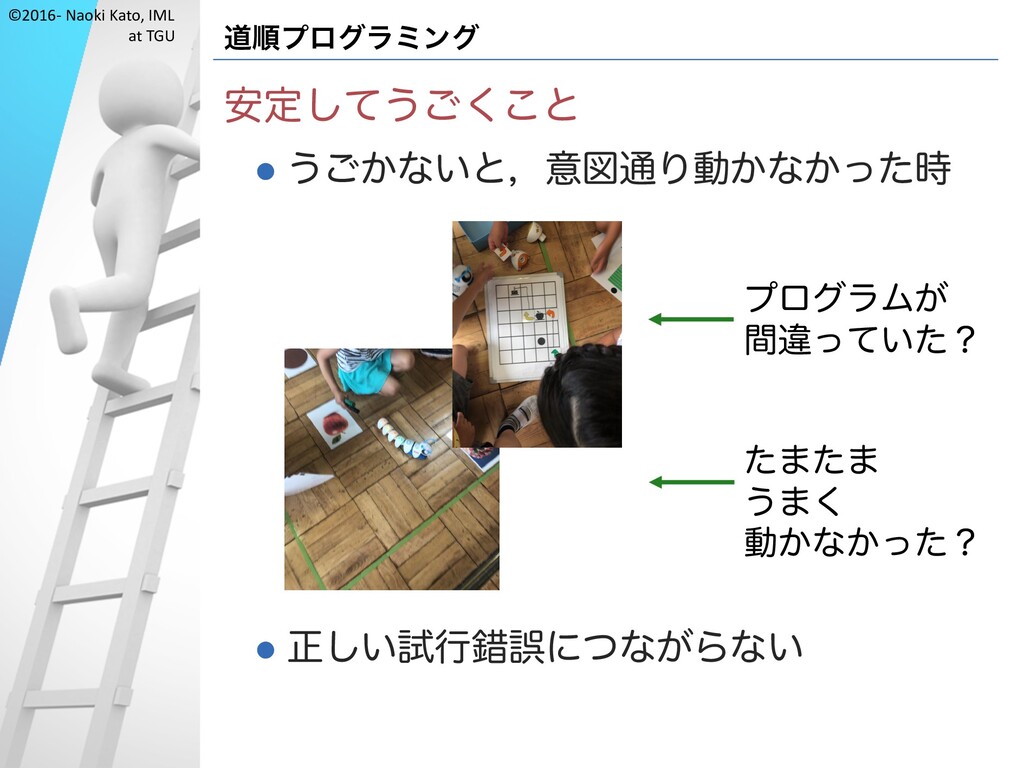
©2016- Naoki Kato, IML at TGU 道順プログラミング 安定してうごくこと l うごかないと,意図通り動かなかった時
l 正しい試行錯誤につながらない プログラムが 間違っていた? たまたま うまく 動かなかった?
©2016- Naoki Kato, IML at TGU 道順プログラミングの難易度制御
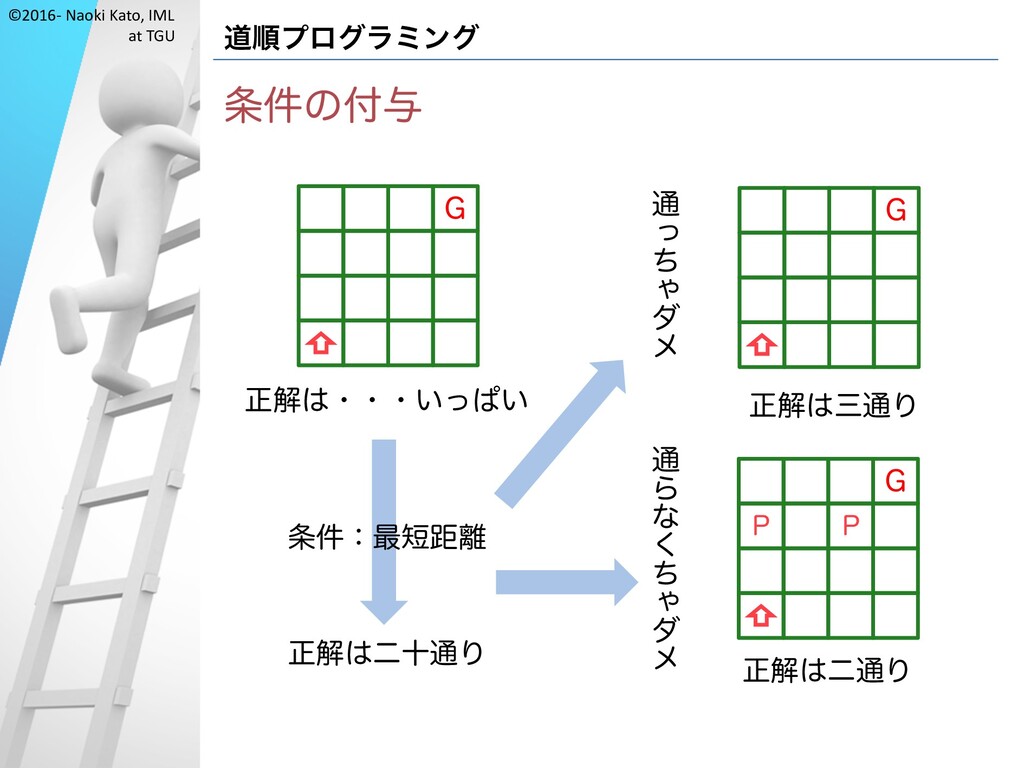
©2016- Naoki Kato, IML at TGU 道順プログラミング 条件の付与 G 正解は・・・いっぱい
G 正解は三通り P P G 正解は二通り 条件:最短距離 正解は二十通り 通 っ ち ゃ ダ メ 通 ら な く ち ゃ ダ メ
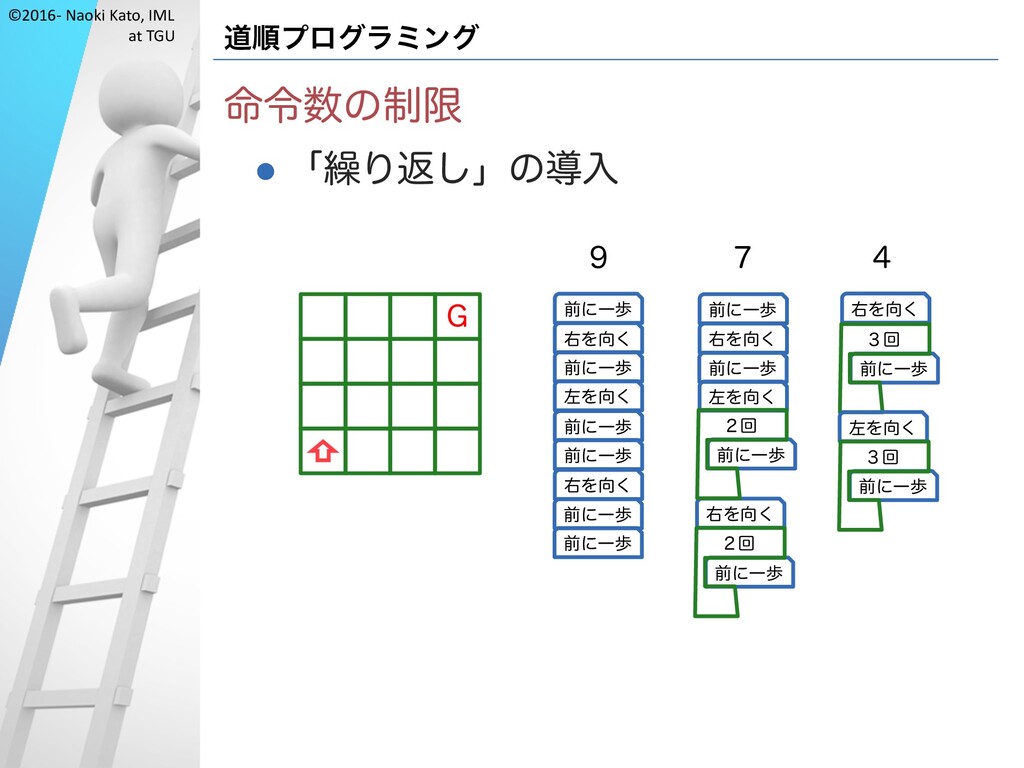
©2016- Naoki Kato, IML at TGU 道順プログラミング 命令数の制限 l 「繰り返し」の導入
G 前に一歩 右を向く 左を向く 前に一歩 前に一歩 右を向く 前に一歩 2回 前に一歩 2回 右を向く 3回 左を向く 前に一歩 3回 前に一歩 右を向く 左を向く 前に一歩 前に一歩 前に一歩 右を向く 前に一歩 前に一歩 9 7 4
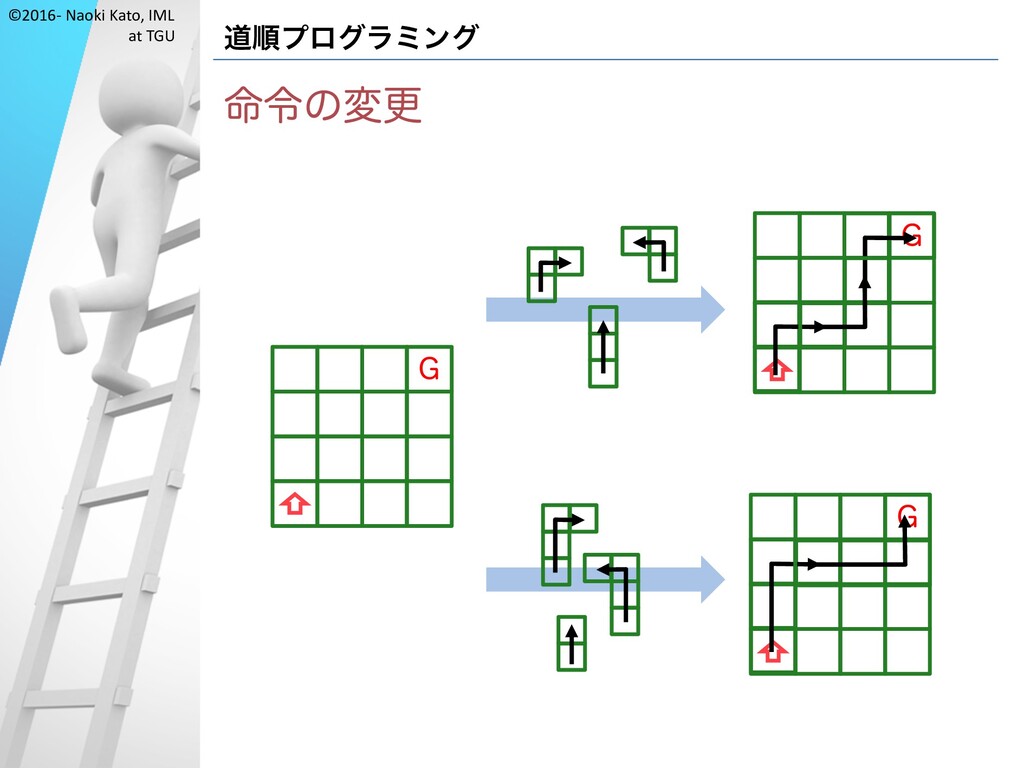
©2016- Naoki Kato, IML at TGU 道順プログラミング 命令の変更 G G
G
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング 動かすプログラミング
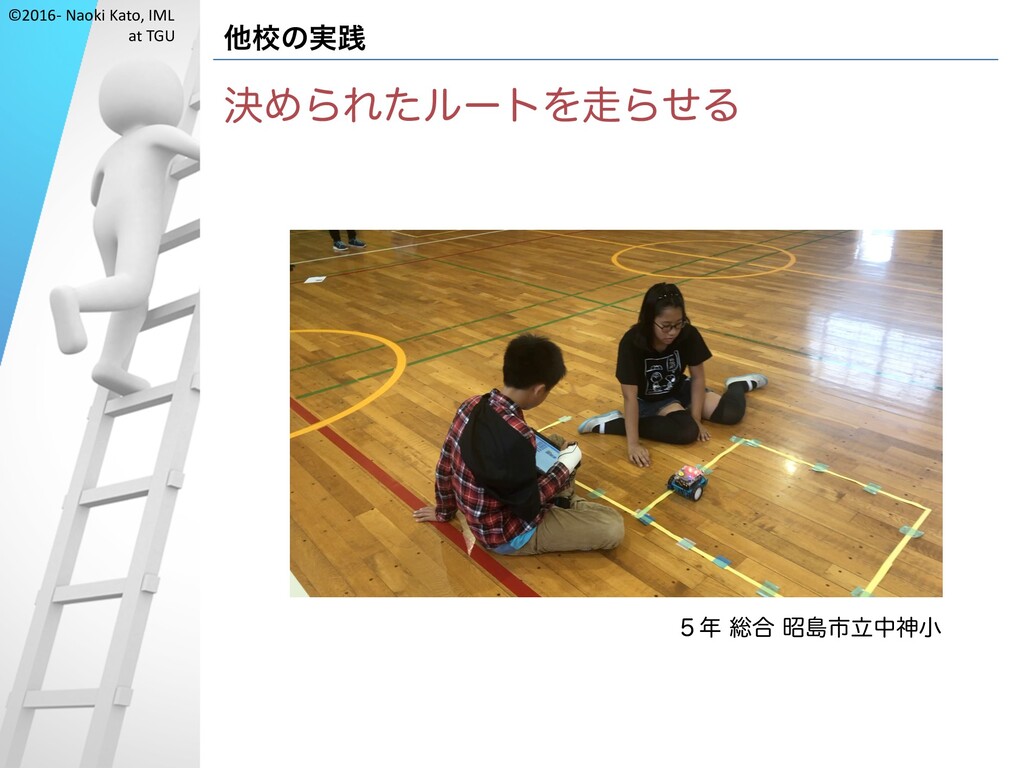
©2016- Naoki Kato, IML at TGU 他校の実践 決められたルートを走らせる 5年 総合
昭島市立中神小
©2016- Naoki Kato, IML at TGU 他校の実践 決められたルートを走らせる 5年 総合
東大和市立第二小
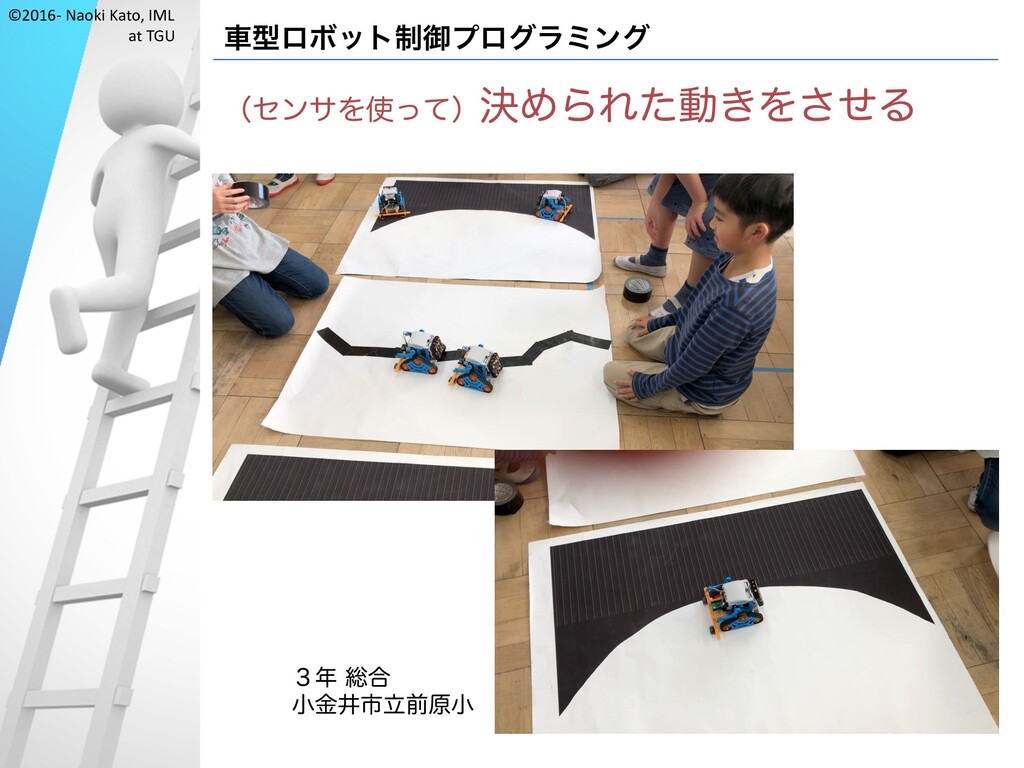
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング (センサを使って)決められた動きをさせる 3年 総合
小金井市立前原小
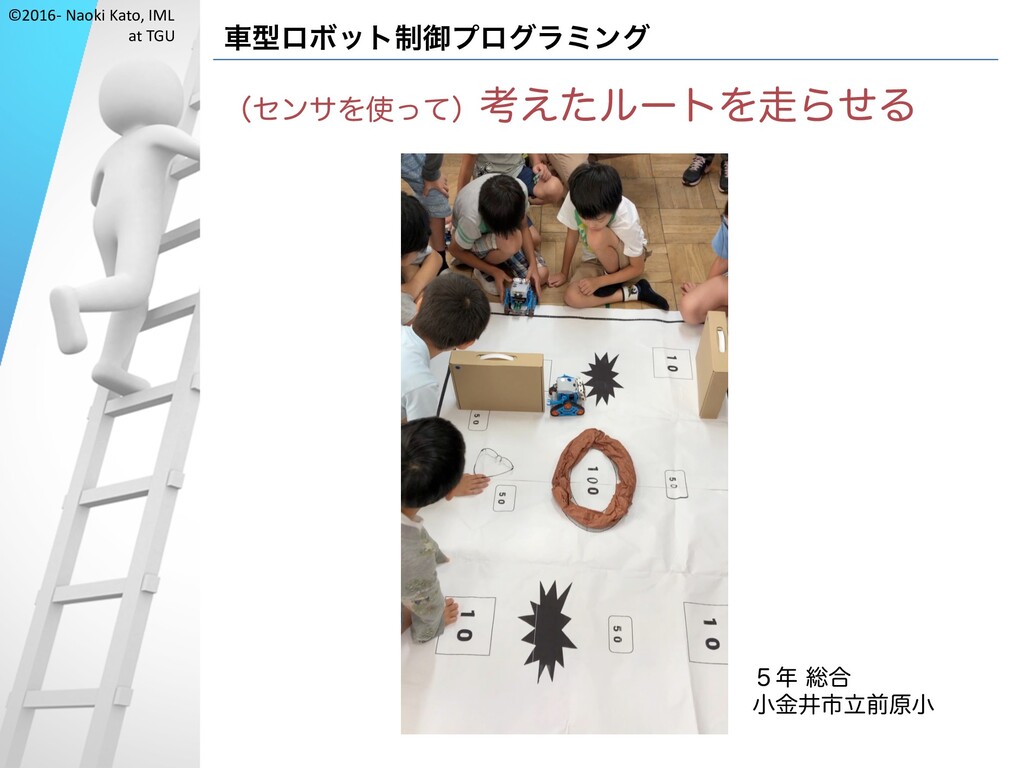
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング (センサを使って)考えたルートを走らせる 5年 総合
小金井市立前原小
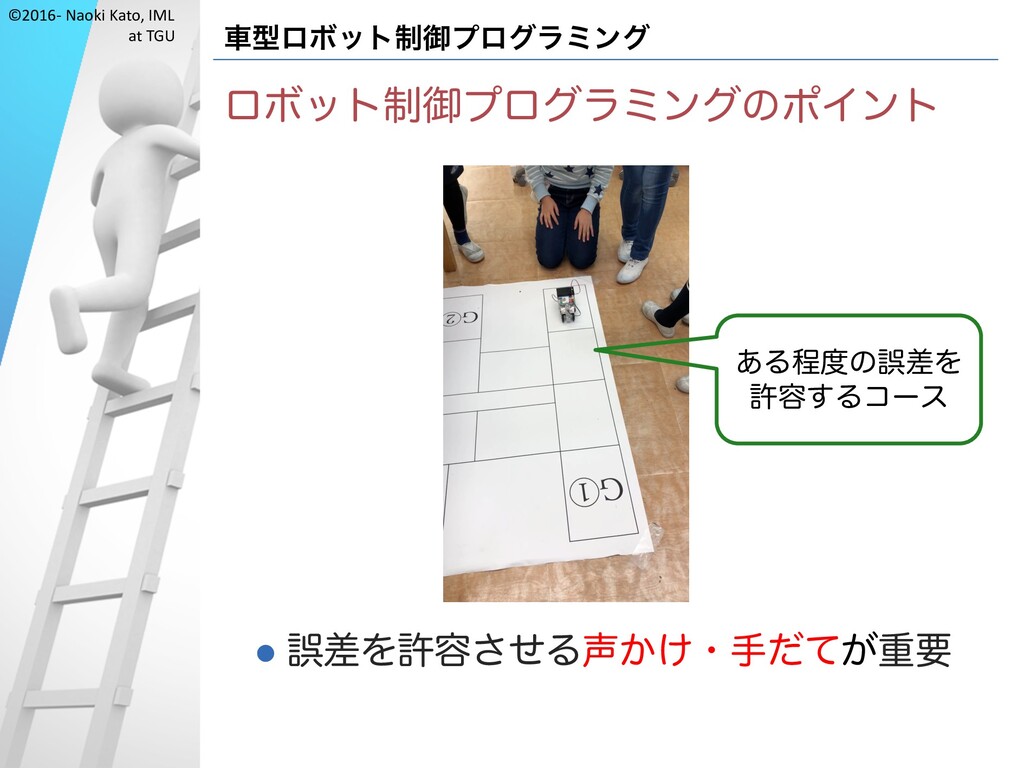
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング ロボット制御プログラミングのポイント l 誤差を許容させる声かけ・手だてが重要
ある程度の誤差を 許容するコース
©2016- Naoki Kato, IML at TGU 車型ロボット制御の基本
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング モータ制御
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング 距離センサ
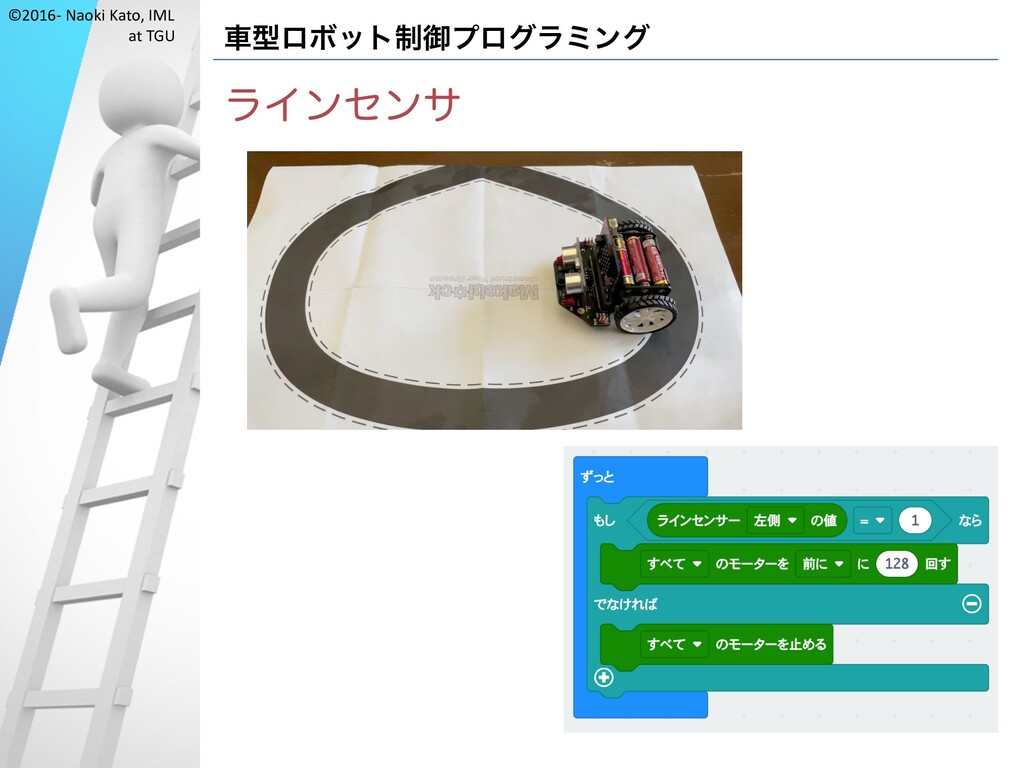
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング ラインセンサ
©2016- Naoki Kato, IML at TGU いろいろな車型ロボット
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング Maqueen +makecode
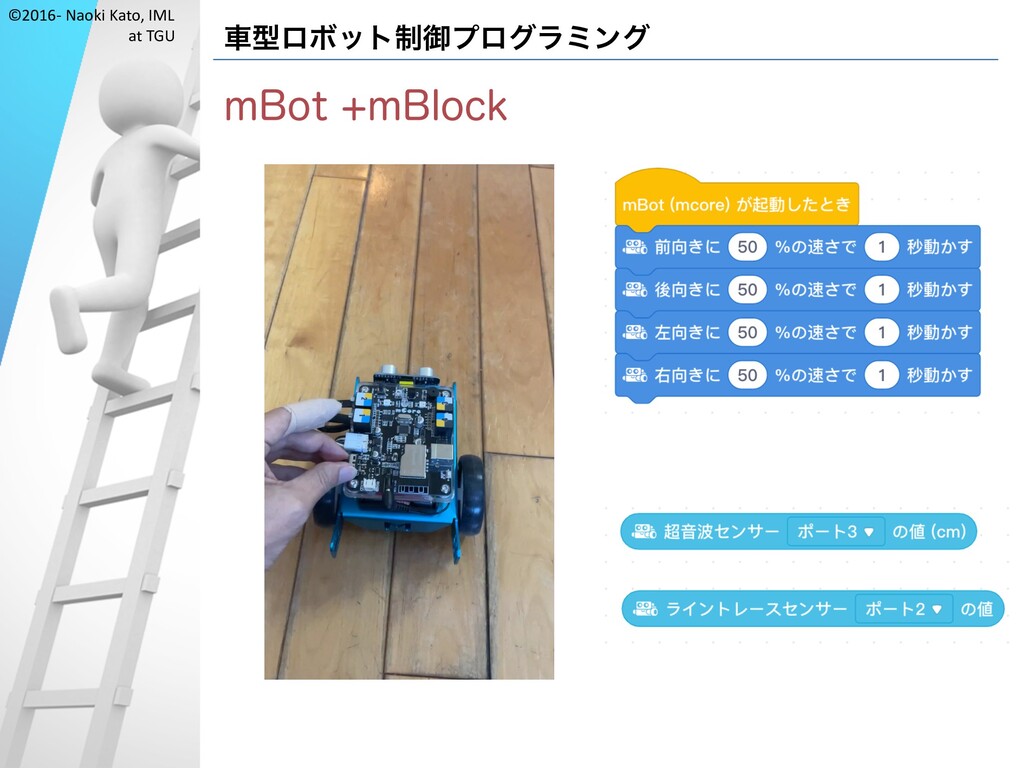
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング mBot +mBlock
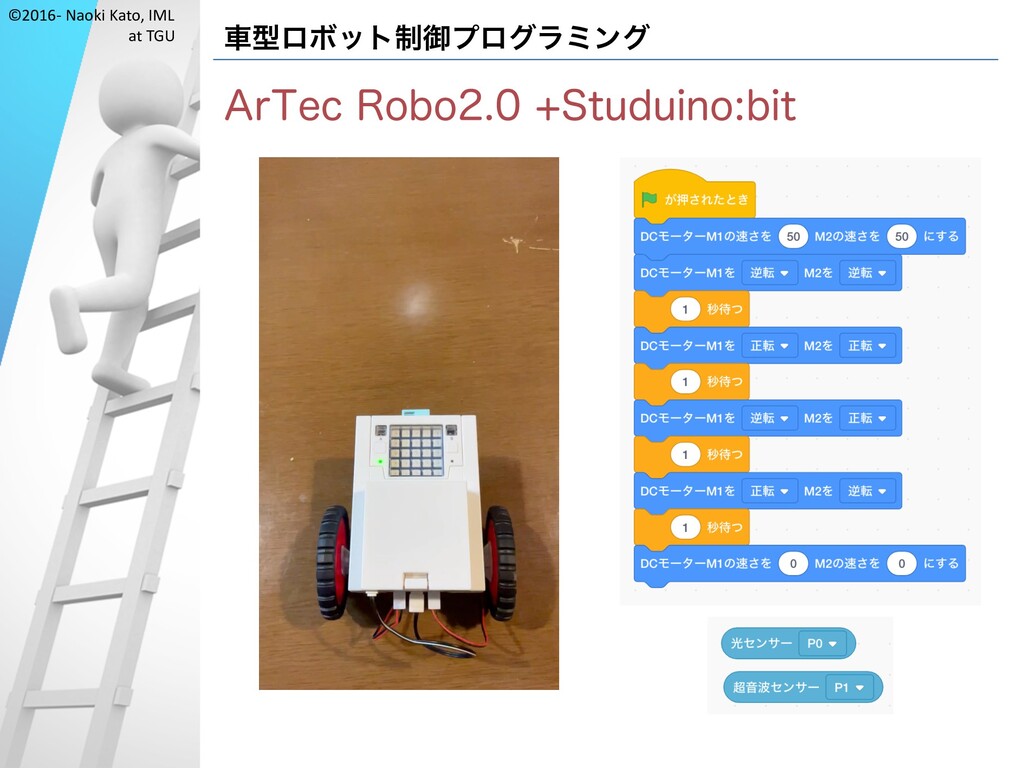
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング ArTec Robo2.0 +Studuino:bit
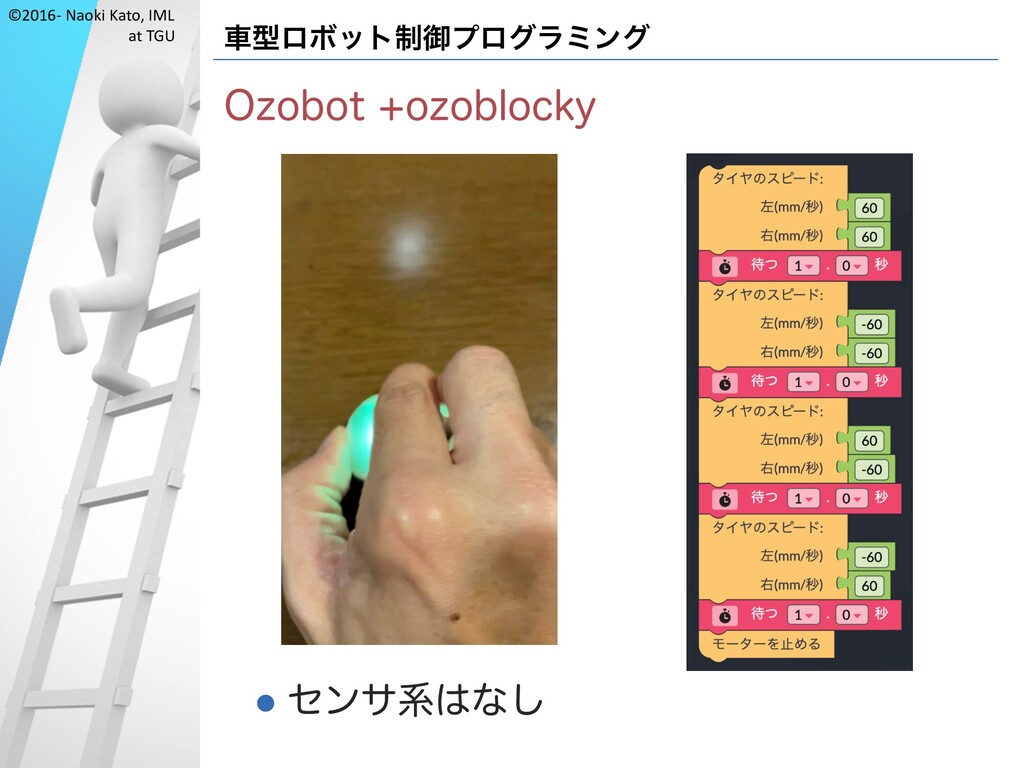
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング Ozobot +ozoblocky l
センサ系はなし
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 動かすプログラミング
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 かっこいい動きを創作する 5年 総合
東大和市立第二小
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 相手を押し出す動きを考える 6年 課程外
小平市立小平第七小学校
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 楽しい動きを創作する(光のパレード) 6年 図工
町田市立第五小
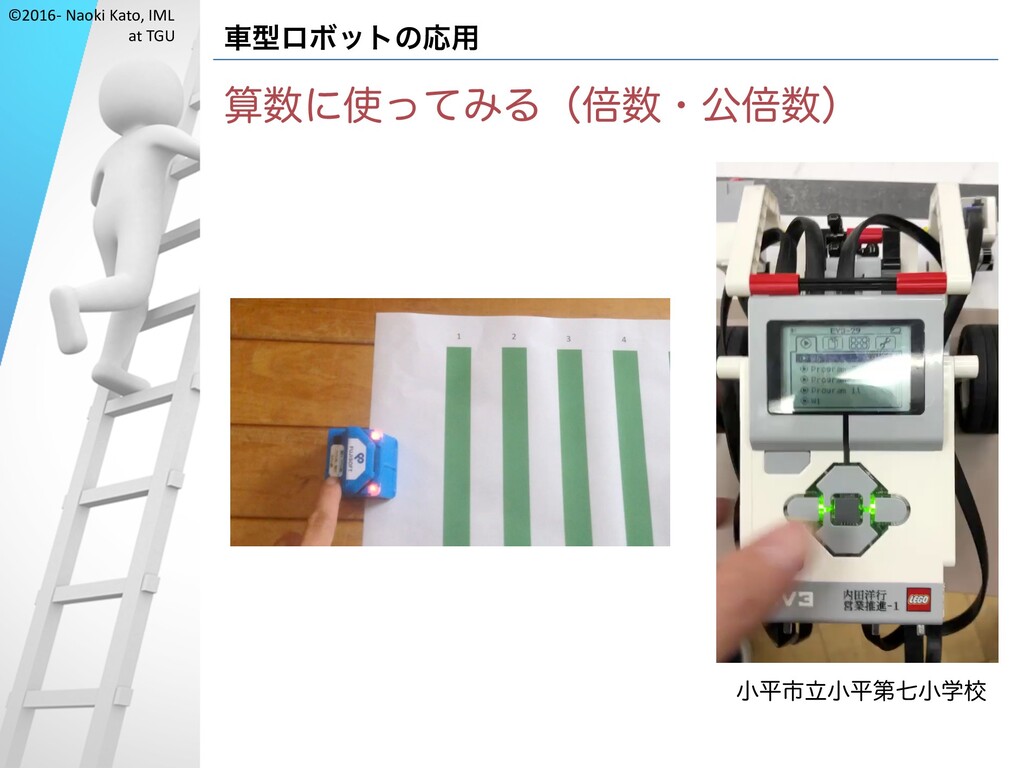
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 算数に使ってみる(倍数・公倍数) 小平市立小平第七小学校
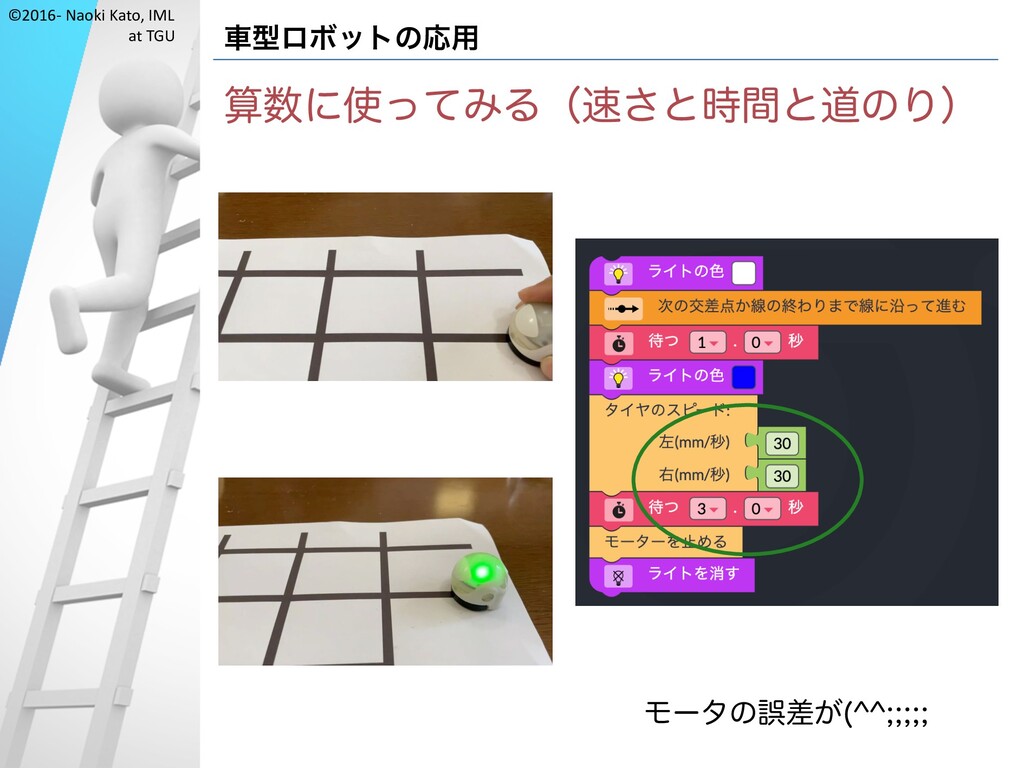
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 算数に使ってみる(速さと時間と道のり) モータの誤差が(^^;;;;;
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 理科に使ってみる(テコの原理) 小金井市立前原小学校
©2016- Naoki Kato, IML at TGU おわりに 動かすプログラミング
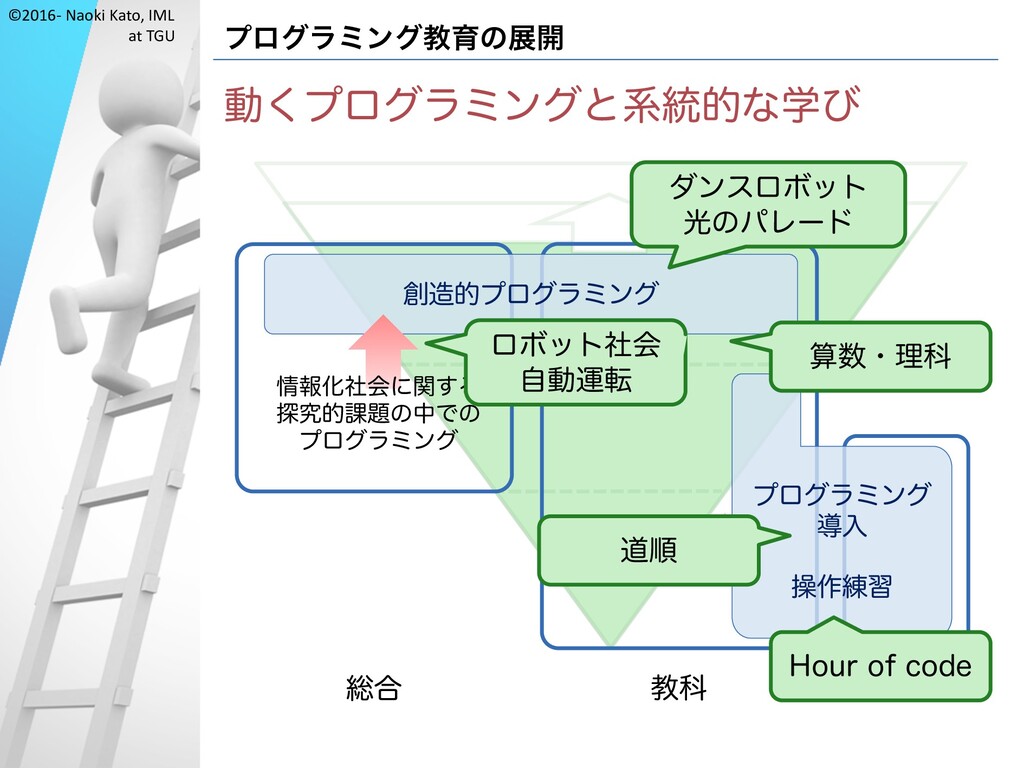
©2016- Naoki Kato, IML at TGU プログラミング教育の展開 動くプログラミングと系統的な学び 創造的プログラミング 情報化社会に関する
探究的課題の中での プログラミング プログラミング 導入 操作練習 総合 教科 課程外 Hour of code 道順 ロボット社会 自動運転 ダンスロボット 光のパレード 算数・理科
©2016- Naoki Kato, IML at TGU おしまい 動かすプログラミング
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}