Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
分散処理システム(IoT)によるトレーサビリティの向上
Search
neonankiti
March 08, 2022
Technology
290
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
分散処理システム(IoT)によるトレーサビリティの向上
neonankiti
March 08, 2022
More Decks by neonankiti
See All by neonankiti
マルチモーダルデータ基盤の課題と観点
neonankiti
1
640
GPTsによるアシスタント業務の改善
neonankiti
3
2.7k
LLM_robustness_and_ops_in_production.pdf
neonankiti
5
2.9k
レストランにおける分散システムの構築と改善.pdf
neonankiti
0
250
外食DXにおけるエンジニアリングデザイン
neonankiti
0
510
Androidにおけるパフォーマンスチューニング実践
neonankiti
8
14k
クライアントサイドから考える マイクロサービス
neonankiti
0
3.2k
Elastic Team Building
neonankiti
4
9.6k
Other Decks in Technology
See All in Technology
AI x 開発生産性を取り巻く予算戦略と投資対効果
i35_267
2
1.4k
AI、CDK と協働する Full TypeScript アプリケーション開発 / Full TypeScript Application with AI and CDK
geekplus_tech
2
430
データエンジニアリングとドメイン駆動設計
masuda220
PRO
7
1.2k
全員がリーダーである世界へ キリマンジャロ登頂とシェアド・リーダー
jinwatanabe
0
110
【Claude Code】鹿野さんに聞く 私の推しの並行開発環境 大公開 / claude-code-parallel-2026-07-15
tonkotsuboy_com
13
8.9k
Oracle Base Database Service 技術詳細
oracle4engineer
PRO
15
110k
個人開発で育てる「大規模設計の苗床」 - AI時代の1人開発から始める業務への知識接続 / The Seedbed for Large-Scale Design - From AI-Era Solo Projects to Professional Knowledge
bitkey
PRO
1
290
SoccerMaster: A Vision Foundation Model for Soccer Understanding
kzykmyzw
0
150
「顧客の声を聞かなければ何も始まらない」 ── 顧客の声から生まれた『AI返信補助機能』の開発プロセス / AICon2026_shikata_imai
rakus_dev
0
220
「休む」重要さ
smt7174
1
120
複数プロダクトで進めるAI機能実装 ── 実践から得たリアルな学びとロードマップ実現への挑戦 / AICon2026_yanari
rakus_dev
0
220
“それは自分の仕事じゃない"を 越えて行け
yuukiyo
1
490
Featured
See All Featured
The Illustrated Guide to Node.js - THAT Conference 2024
reverentgeek
1
410
Applied NLP in the Age of Generative AI
inesmontani
PRO
4
2.4k
Lightning Talk: Beautiful Slides for Beginners
inesmontani
PRO
2
610
Agile that works and the tools we love
rasmusluckow
331
22k
How To Stay Up To Date on Web Technology
chriscoyier
790
250k
Imperfection Machines: The Place of Print at Facebook
scottboms
270
14k
Designing for Timeless Needs
cassininazir
1
380
コードの90%をAIが書く世界で何が待っているのか / What awaits us in a world where 90% of the code is written by AI
rkaga
62
45k
Leo the Paperboy
mayatellez
8
1.9k
How to build a perfect <img>
jonoalderson
1
5.8k
WCS-LA-2024
lcolladotor
0
720
Digital Projects Gone Horribly Wrong (And the UX Pros Who Still Save the Day) - Dean Schuster
uxyall
1
2.1k
Transcript
分散処理システム(IoT)によるトレーサビリティの向上 株式会社フードテックキャピタル CTO 南里勇気
2 自己紹介 南里勇気|取締役兼CTO 慶應義塾大学経済学部卒。在学中から株式会社MEDICAでシステム開発、大手調 剤薬局チェーンと共同研究で論文発表。2015年株式会社FiNCに入社してAndroidチ ームマネージャーとしてアプリ改善、GooglePlayベストオブ2018「自己改善部門」大 賞受賞。同年米国シリコンバレーでFiNC Technologies USオフィスを立上げ。2019年 から中国でハードウェアを開発、テックリードとしてプロダクトをローンチ。2020年6月
Bison Holdingsを創業。
3 会社紹介 外食産業でのDXを促進し、テクノロジーを駆使してこの業界を盛り 上げるべく会社を設立致しました。 2022年現在、日本が誇るべき「食」は100年に一度の危機に立たさ れています。 衣食住の一角をなす「なくてはならない産業」でありながら、DX化 に遅れ、さらにコロナ禍による多大な被害は止まるところを知りま せん。 私たちは、外食産業にテクノロジーを提供する先駆者として、新し
い価値と食の未来を創出していきます。DXの促進が、日本の食文 化を大きく発展させることに繋がり「食の未来」が明るいものに変 わっていくことを確信しています。 Mission テクノロジーで 食の未来をつくる Creating the Future of “Food Service” through Technologies
4 サービス紹介 delico (デリコ) は、複数のデリバリー/テイクアウトプラットフォームサービスの オーダーを一元管理するサービスです。 一枚のタブレットで受注、印字し、売上の管理やメニューの更新などができ、 飲食店のデリバリーにおける、生産性向上と収益増加の両方を実現させることができます。
5 分散処理システム(IoT)によるトレーサビリティの向上 本日のテーマ
6 IoTのトレーサビリティ向上の背景 1. 新たなデータパイプラインのニーズ 2. IoTインフラの普及
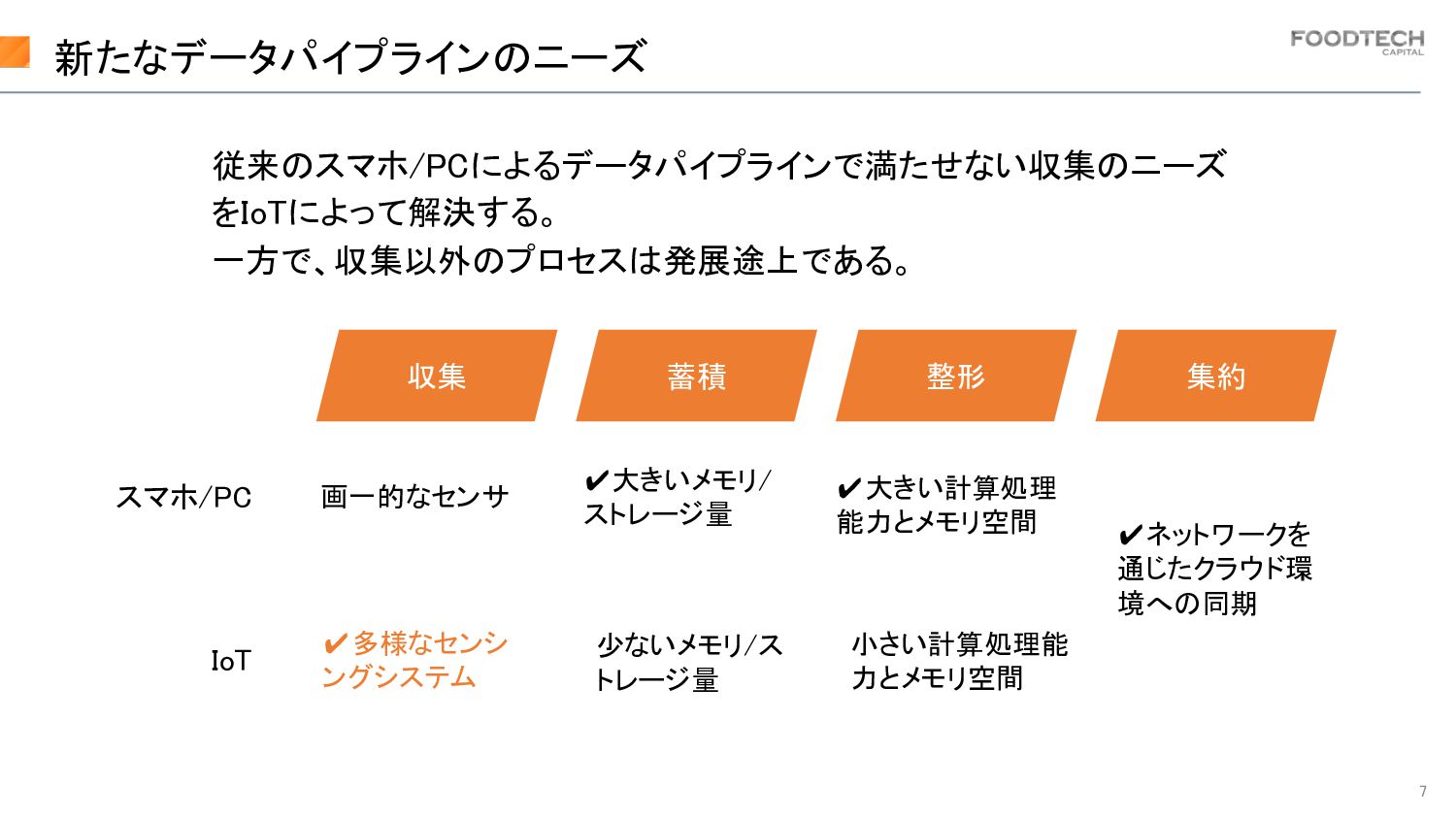
7 ✔ネットワークを 通じたクラウド環 境への同期 従来のスマホ/PCによるデータパイプラインで満たせない収集のニーズ をIoTによって解決する。 一方で、収集以外のプロセスは発展途上である。 新たなデータパイプラインのニーズ 収集 蓄積
整形 集約 スマホ/PC IoT 画一的なセンサ ✔多様なセンシ ングシステム ✔大きいメモリ/ ストレージ量 少ないメモリ/ス トレージ量 ✔大きい計算処理 能力とメモリ空間 小さい計算処理能 力とメモリ空間
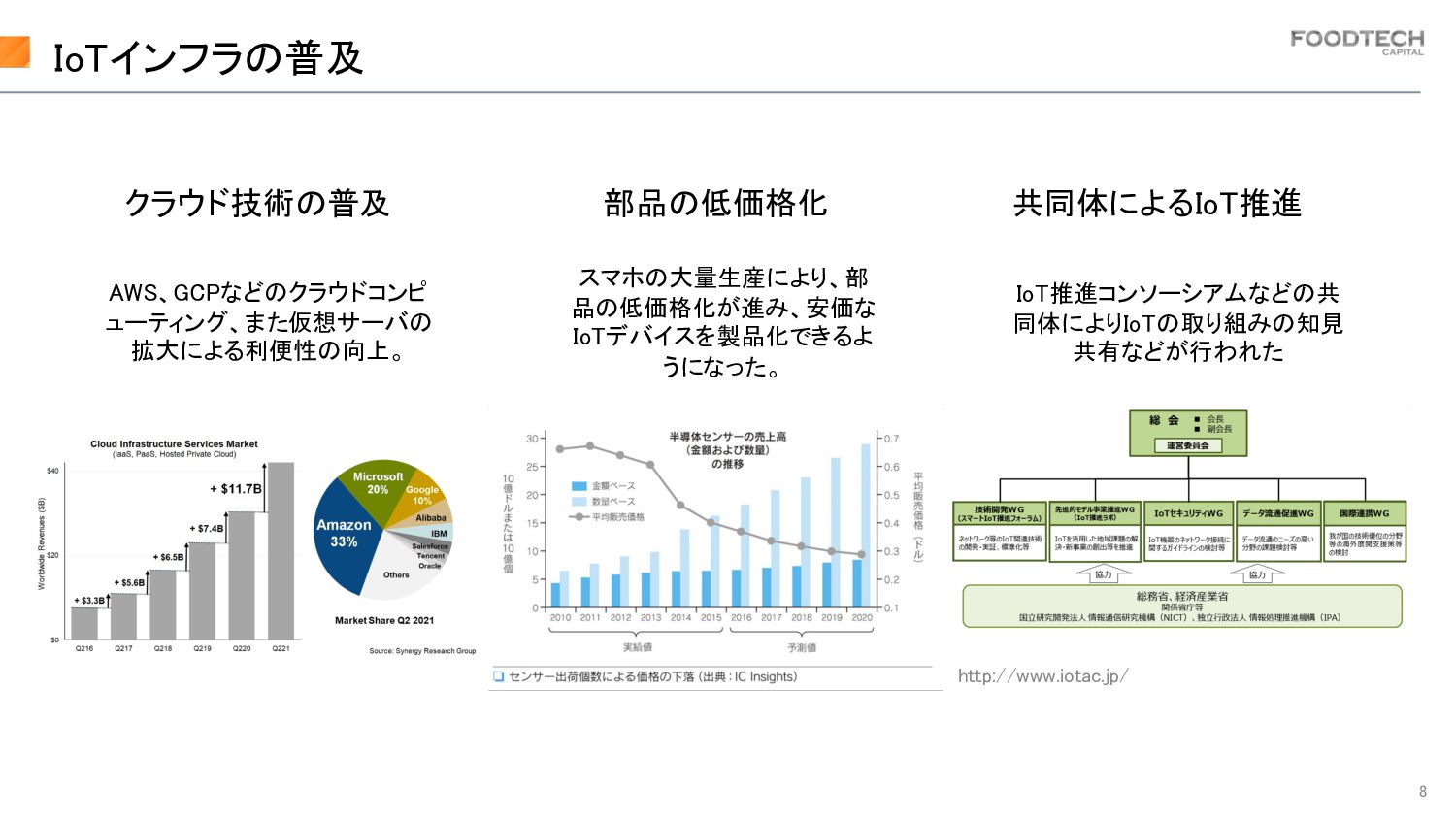
8 AWS、GCPなどのクラウドコンピ ューティング、また仮想サーバの 拡大による利便性の向上。 クラウド技術の普及 IoTインフラの普及 スマホの大量生産により、部 品の低価格化が進み、安価な IoTデバイスを製品化できるよ うになった。
部品の低価格化 共同体によるIoT推進 http://www.iotac.jp/ IoT推進コンソーシアムなどの共 同体によりIoTの取り組みの知見 共有などが行われた
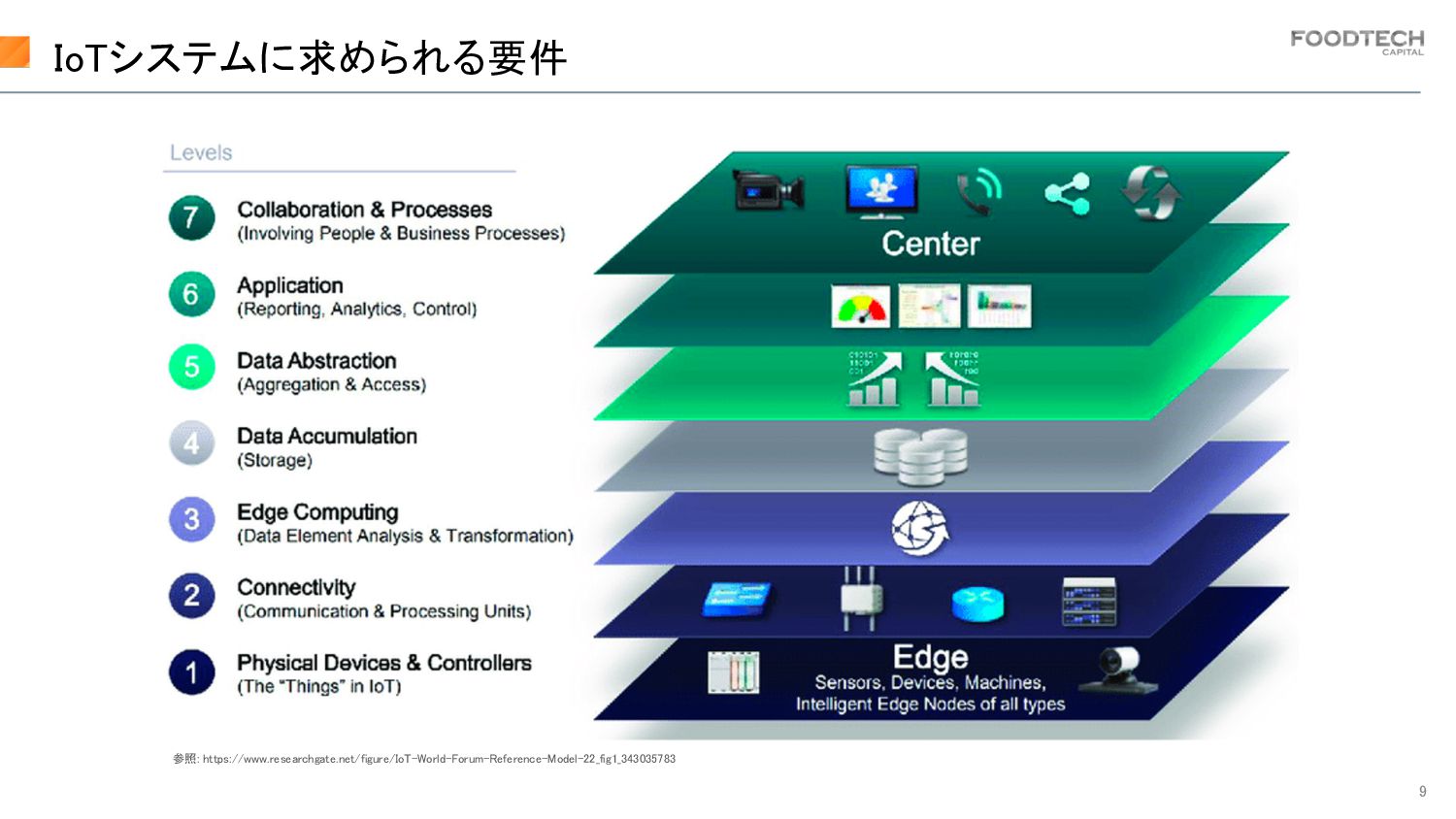
9 IoTシステムに求められる要件 参照: https://www.researchgate.net/figure/IoT-World-Forum-Reference-Model-22_fig1_343035783
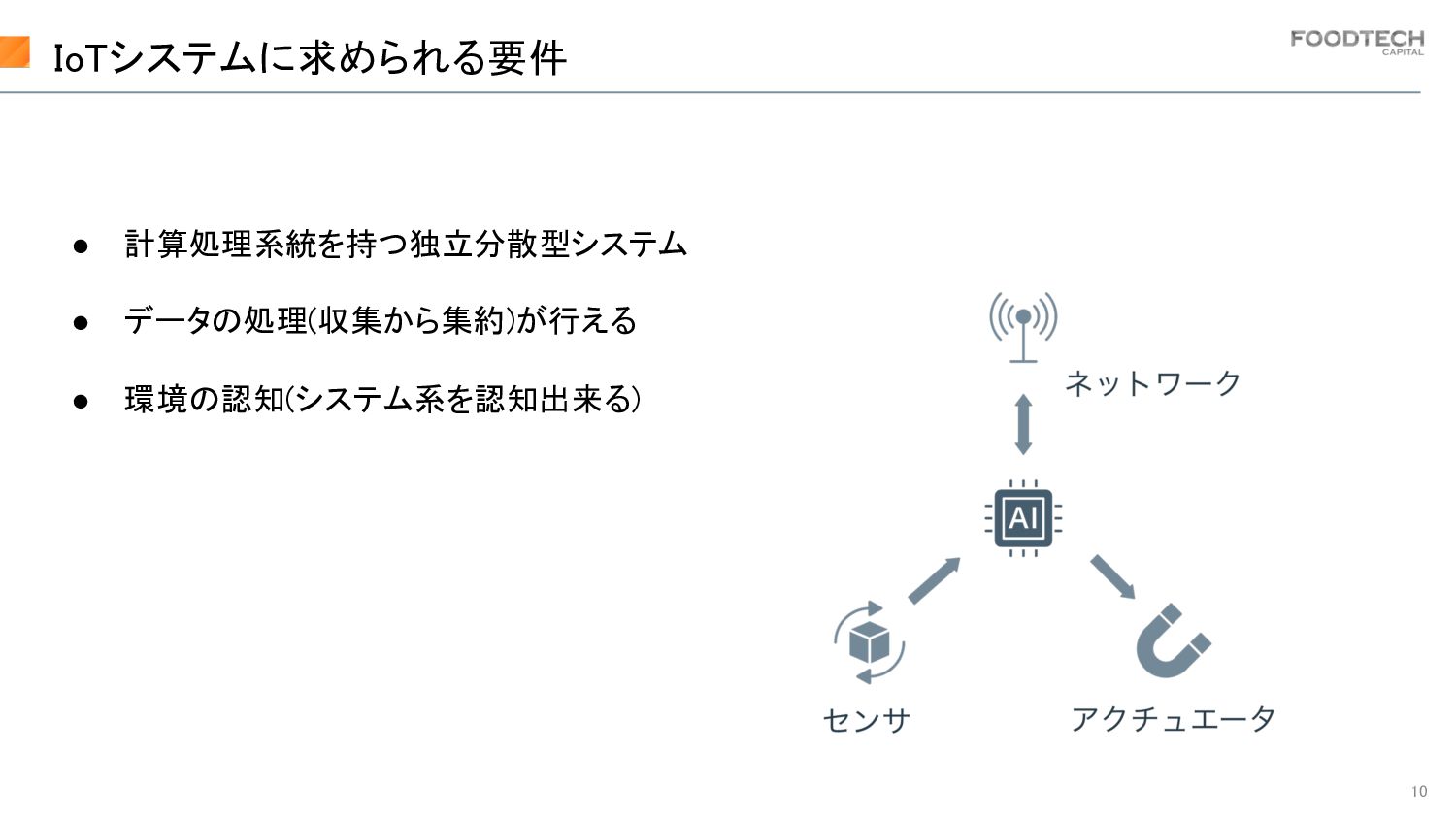
10 • 計算処理系統を持つ独立分散型システム • データの処理(収集から集約)が行える • 環境の認知(システム系を認知出来る) IoTシステムに求められる要件
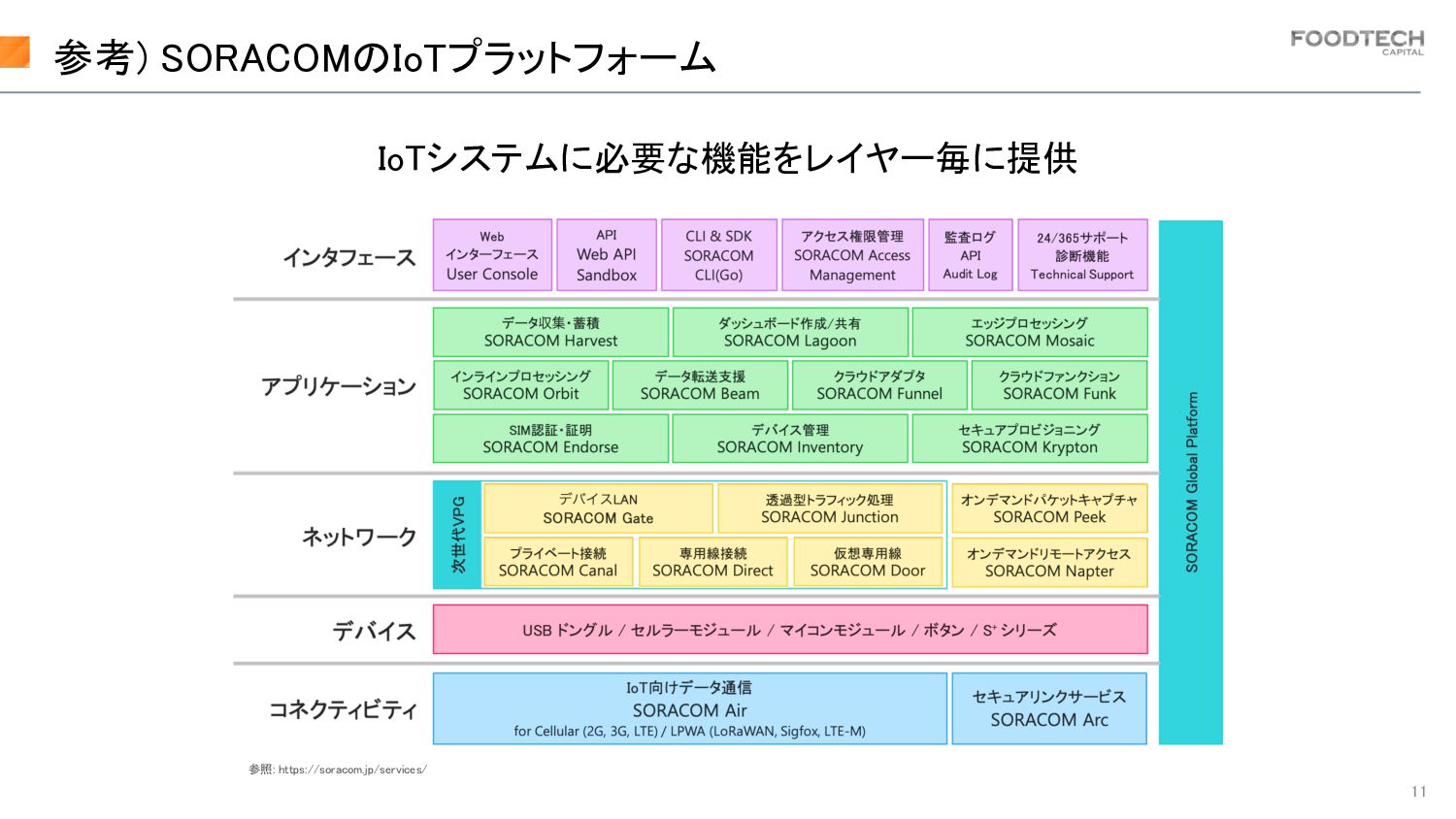
11 参考) SORACOMのIoTプラットフォーム IoTシステムに必要な機能をレイヤー毎に提供 参照: https://soracom.jp/services/
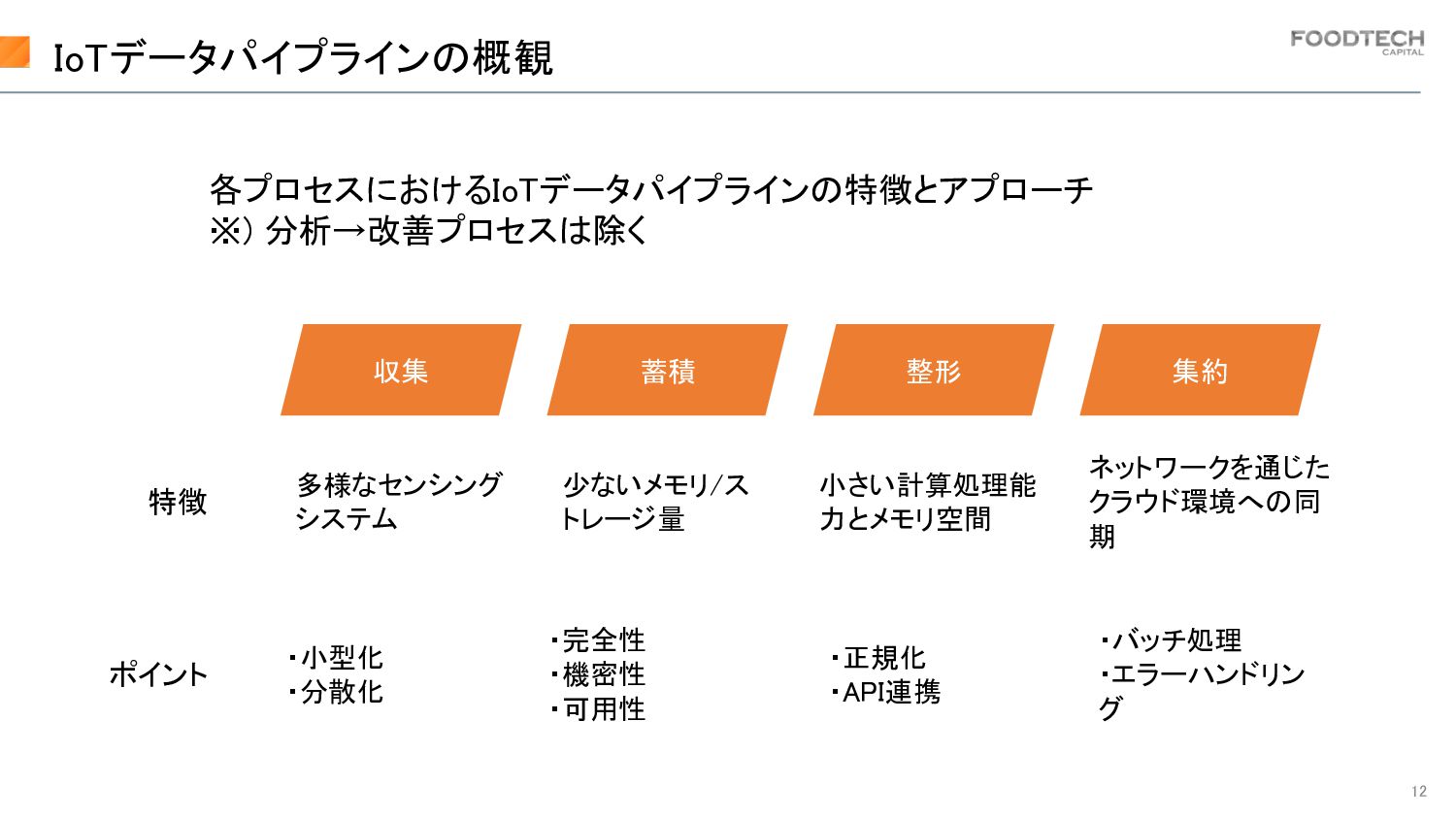
12 ・正規化 ・API連携 各プロセスにおけるIoTデータパイプラインの特徴とアプローチ ※) 分析→改善プロセスは除く ネットワークを通じた クラウド環境への同 期 IoTデータパイプラインの概観
収集 蓄積 整形 集約 多様なセンシング システム 少ないメモリ/ス トレージ量 小さい計算処理能 力とメモリ空間 ポイント 特徴 ・小型化 ・分散化 ・完全性 ・機密性 ・可用性 ・バッチ処理 ・エラーハンドリン グ
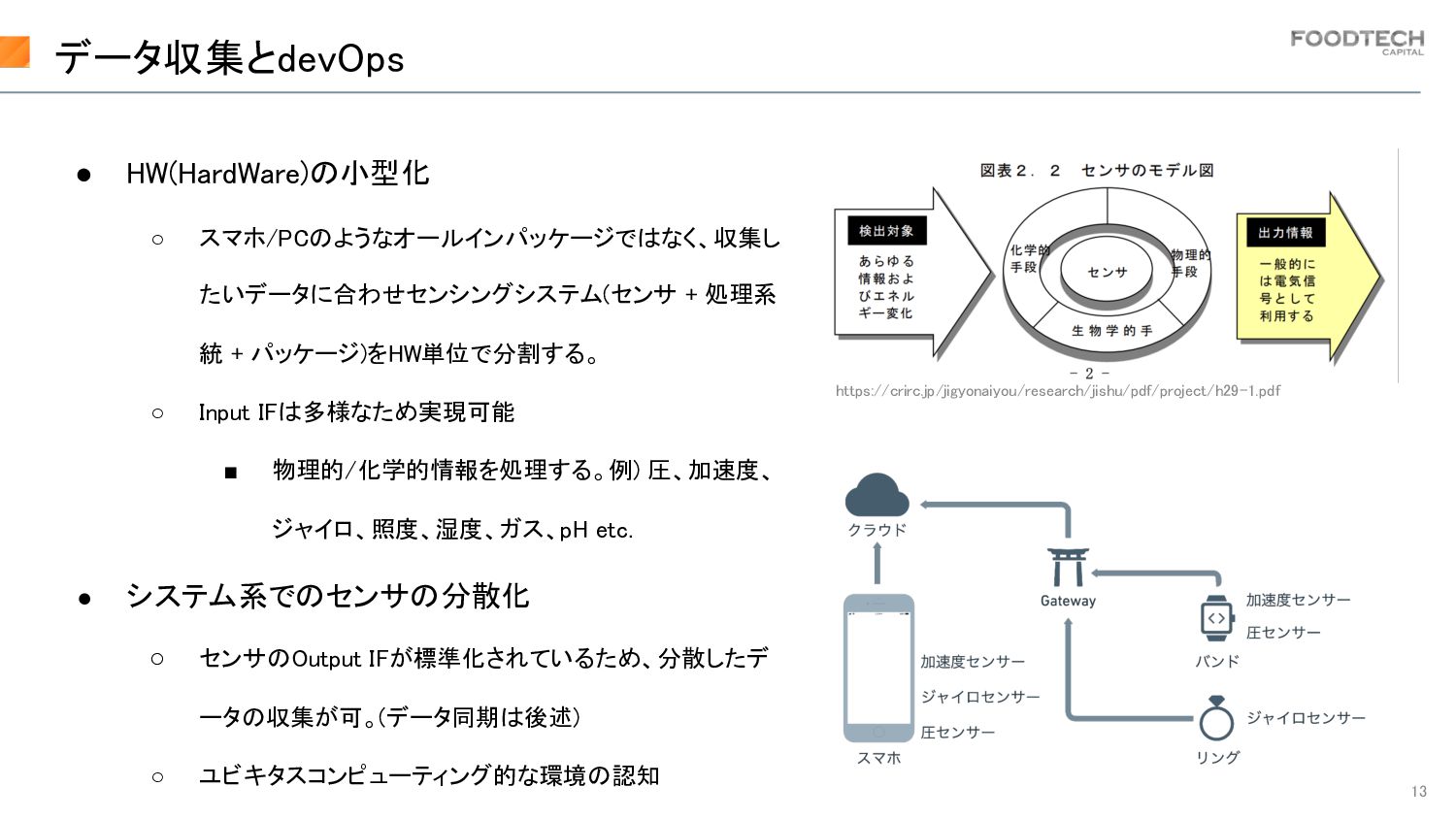
13 • HW(HardWare)の小型化 ◦ スマホ/PCのようなオールインパッケージではなく、収集し たいデータに合わせセンシングシステム(センサ + 処理系 統 +
パッケージ)をHW単位で分割する。 ◦ Input IFは多様なため実現可能 ▪ 物理的/化学的情報を処理する。例) 圧、加速度、 ジャイロ、照度、湿度、ガス、pH etc. • システム系でのセンサの分散化 ◦ センサのOutput IFが標準化されているため、分散したデ ータの収集が可。(データ同期は後述) ◦ ユビキタスコンピューティング的な環境の認知 データ収集とdevOps https://crirc.jp/jigyonaiyou/research/jishu/pdf/project/h29-1.pdf
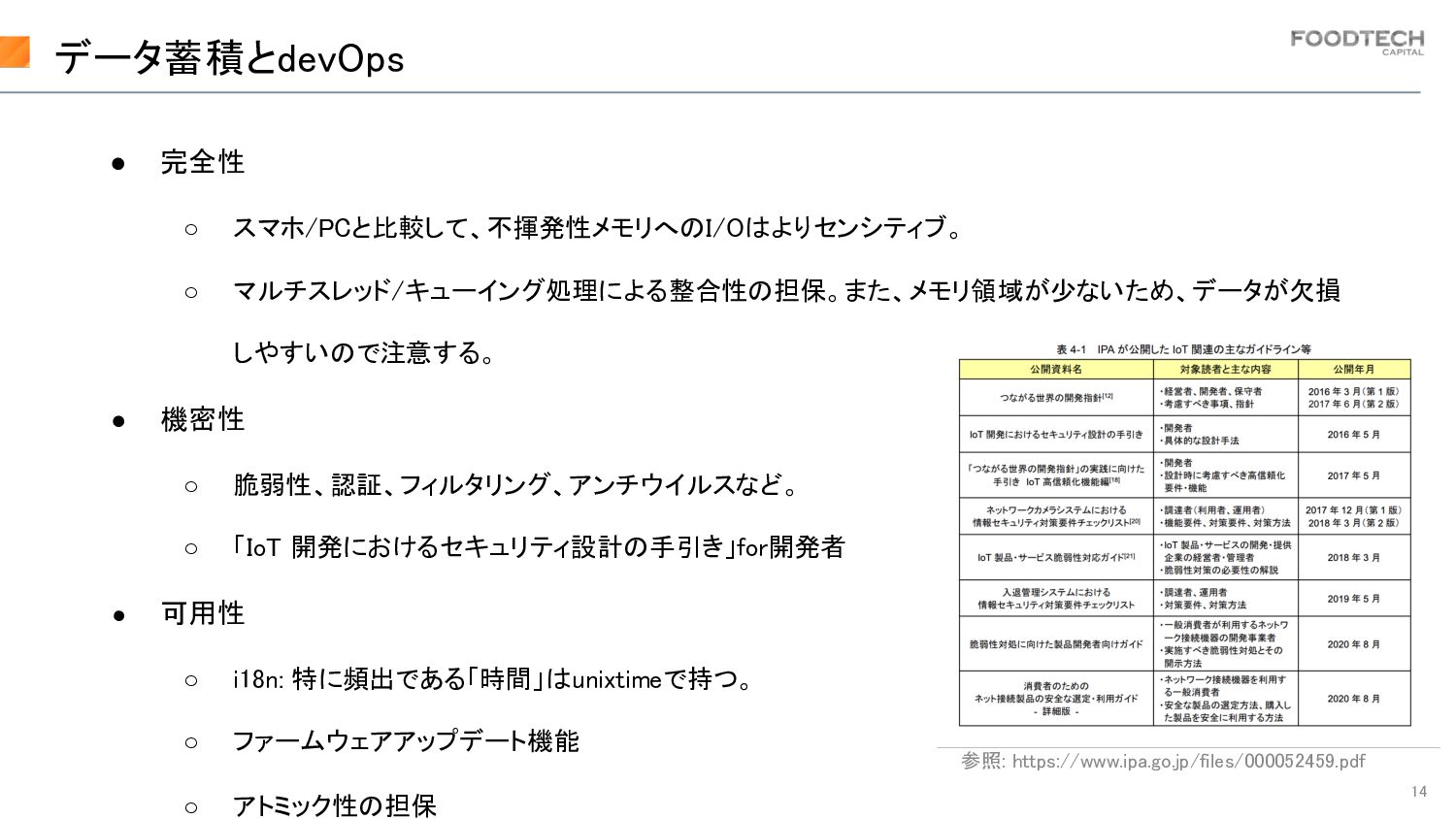
14 データ蓄積とdevOps • 完全性 ◦ スマホ/PCと比較して、不揮発性メモリへのI/Oはよりセンシティブ。 ◦ マルチスレッド/キューイング処理による整合性の担保。また、メモリ領域が少ないため、データが欠損 しやすいので注意する。 •
機密性 ◦ 脆弱性、認証、フィルタリング、アンチウイルスなど。 ◦ 「IoT 開発におけるセキュリティ設計の手引き」for開発者 • 可用性 ◦ i18n: 特に頻出である「時間」はunixtimeで持つ。 ◦ ファームウェアアップデート機能 ◦ アトミック性の担保 参照: https://www.ipa.go.jp/files/000052459.pdf
15 データ整形とdevOps • クリーニングと正規化 ◦ センサーデータは大量になるため、クリーニングは必ず必要。 ◦ 独自ロジック or ML/DLによるエッジコンピューティングでの正規化
▪ 計算処理的にロースペックであるため、精度とバランスを取る。 • 外部システムへのAPI連携 ◦ スマホ/PCでの利用頻度が高いJSON形式は冗長でデータ量が多くなるため、IoTに適さないこと がある。 ▪ データサイズの上限を設定し、フォーマットを決定する必要がある。 ▪ スペックが低いため、処理速度にも要件を設定する。
16 • バッチ処理(センサー) ◦ センサ毎のデータ同期タイミングは非同期的なので、集約タイミングではバッチ処理を検討し、消費電力 効率を高める。 • エラーハンドリングによる完全性の担保 ◦ SSOT(Single
Source Of Ttruth)に従ったデータ同期の実施。 ▪ IoTデータは消える前提で、同期したデータのタイムスタンプを持ち管理する。 ◦ ネットワークの帯域が低い&メモリのオーバーフローが起きやすいため、エラー時にはレスポンス、リトライ 処理などを入れる。 ◦ エラーコードはデータ容量上、説明的に出来ないためドキュメント整備を整える。 データ集約とdevOps
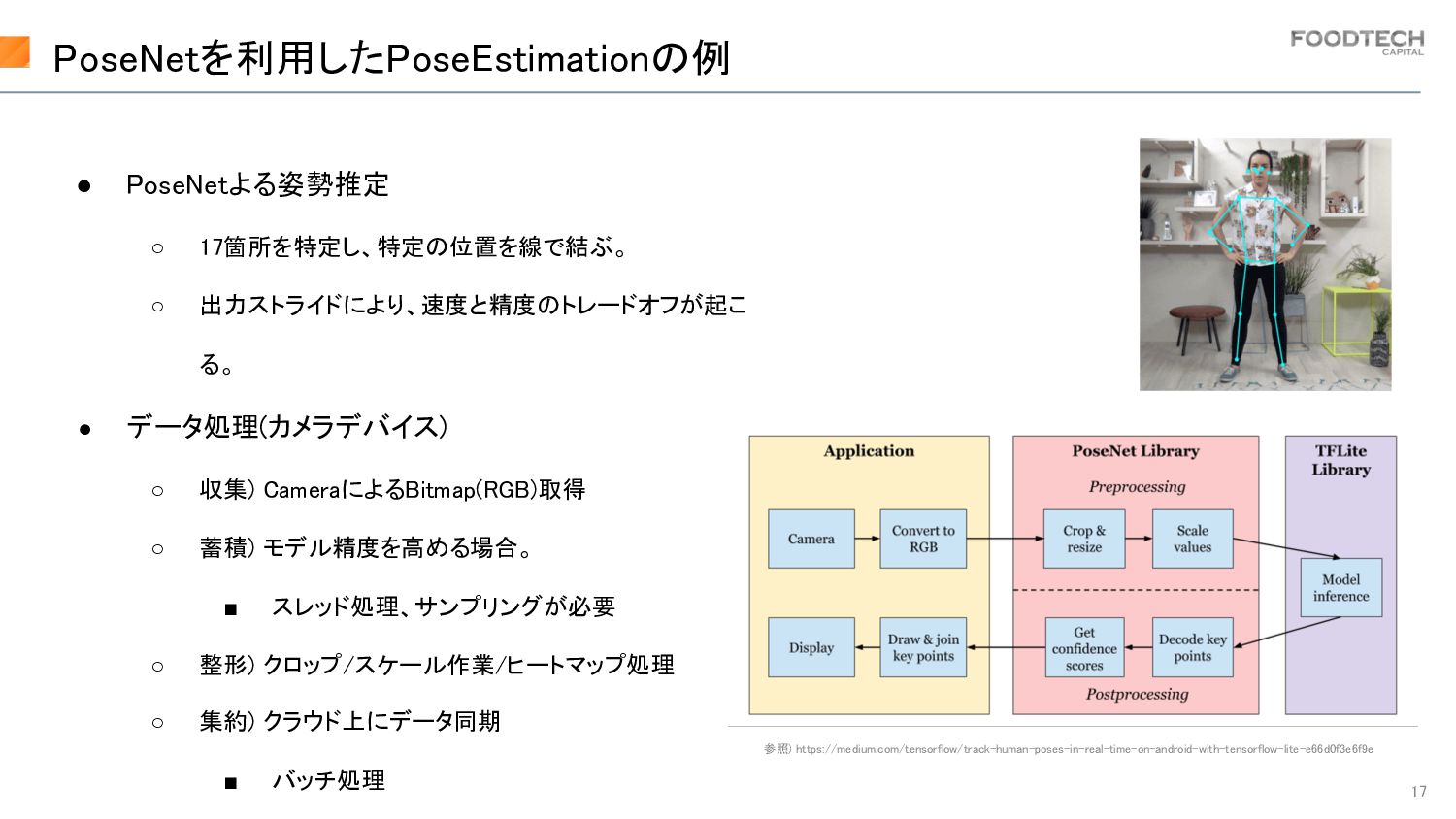
17 PoseNetを利用したPoseEstimationの例 • PoseNetよる姿勢推定 ◦ 17箇所を特定し、特定の位置を線で結ぶ。 ◦ 出力ストライドにより、速度と精度のトレードオフが起こ る。 •
データ処理(カメラデバイス) ◦ 収集) CameraによるBitmap(RGB)取得 ◦ 蓄積) モデル精度を高める場合。 ▪ スレッド処理、サンプリングが必要 ◦ 整形) クロップ/スケール作業/ヒートマップ処理 ◦ 集約) クラウド上にデータ同期 ▪ バッチ処理 参照) https://medium.com/tensorflow/track-human-poses-in-real-time-on-android-with-tensorflow-lite-e66d0f3e6f9e
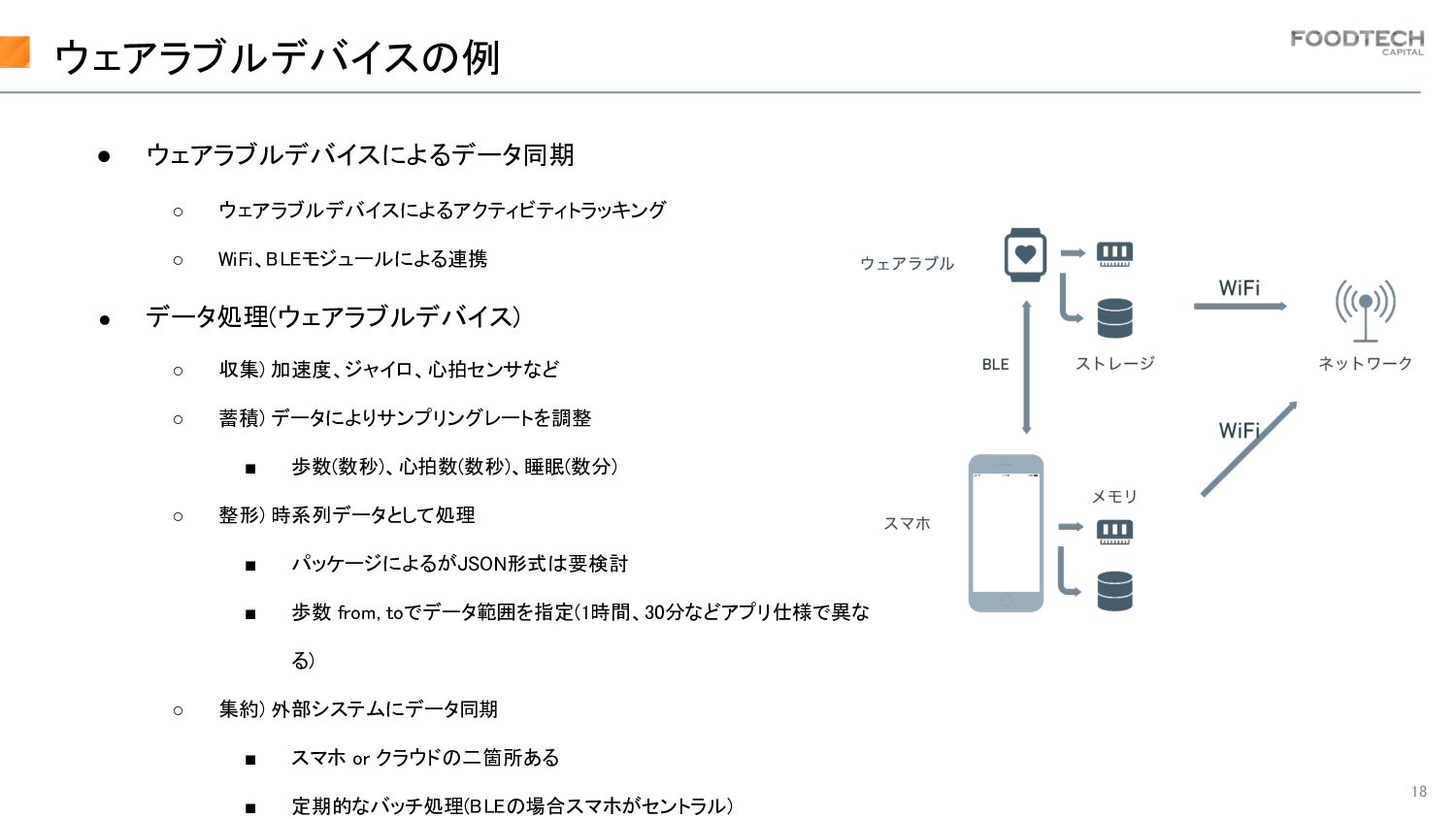
18 • ウェアラブルデバイスによるデータ同期 ◦ ウェアラブルデバイスによるアクティビティトラッキング ◦ WiFi、BLEモジュールによる連携 • データ処理(ウェアラブルデバイス) ◦
収集) 加速度、ジャイロ、心拍センサなど ◦ 蓄積) データによりサンプリングレートを調整 ▪ 歩数(数秒)、心拍数(数秒)、睡眠(数分) ◦ 整形) 時系列データとして処理 ▪ パッケージによるがJSON形式は要検討 ▪ 歩数 from, toでデータ範囲を指定(1時間、30分などアプリ仕様で異な る) ◦ 集約) 外部システムにデータ同期 ▪ スマホ or クラウドの二箇所ある ▪ 定期的なバッチ処理(BLEの場合スマホがセントラル) ウェアラブルデバイスの例
19 まとめ • データ収集の多様化によるデータパイプラインの変容 • IoTインフラの普及によるデバイス構築のコストの低減 • IoT devOpsでトレーサビリティを向上させる
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}