models PAUL CONSTANTINE Assistant Professor Department of Computer Science University of Colorado, Boulder activesubspaces.org! @DrPaulynomial! SLIDES AVAILABLE UPON REQUEST DISCLAIMER: These slides are meant to complement the oral presentation. Use out of context at your own risk. Thanks to: Qiqi Wang (MIT, AeroAstro) David Gleich (Purdue, CS) Rachel Ward (UT Austin, Math) Armin Eftekhari (Alan Turing Institute) Jeff Hokanson (CU Boulder, CS)
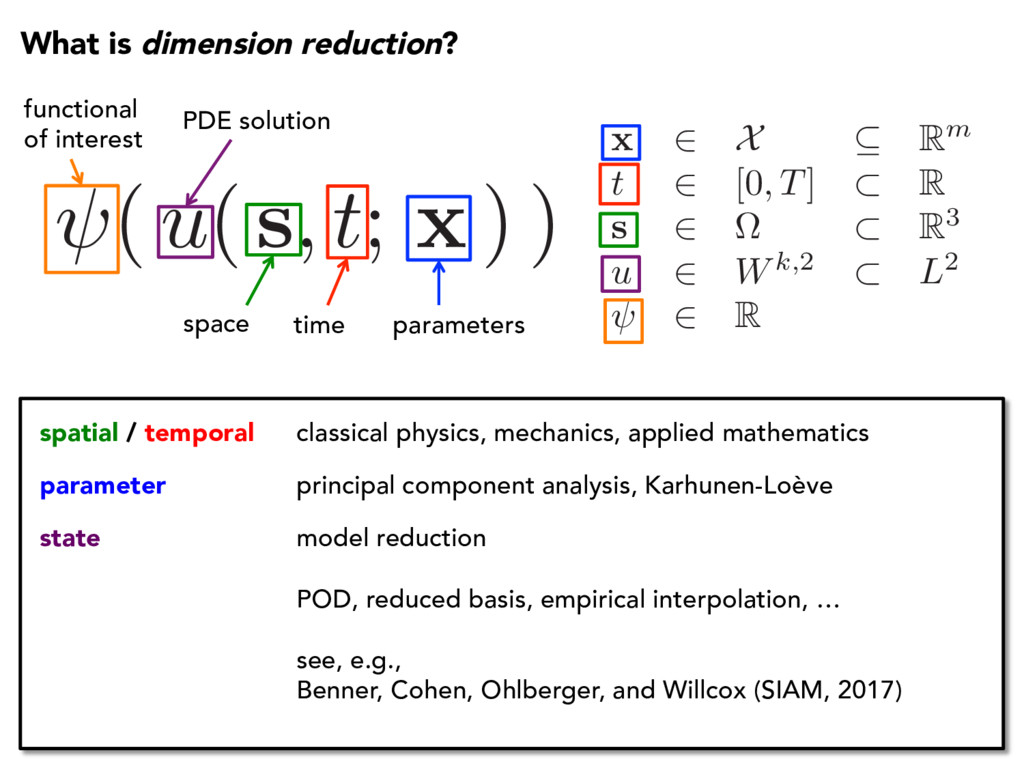
temporal classical physics, mechanics, applied mathematics parameter principal component analysis, Karhunen-Loève state model reduction POD, reduced basis, empirical interpolation, … see, e.g., Benner, Cohen, Ohlberger, and Willcox (SIAM, 2017) PDE solution space time parameters functional of interest What is dimension reduction? x 2 X ✓ Rm t 2 [0, T] ⇢ R s 2 ⌦ ⇢ R3 u 2 Wk,2 ⇢ L2 2 R
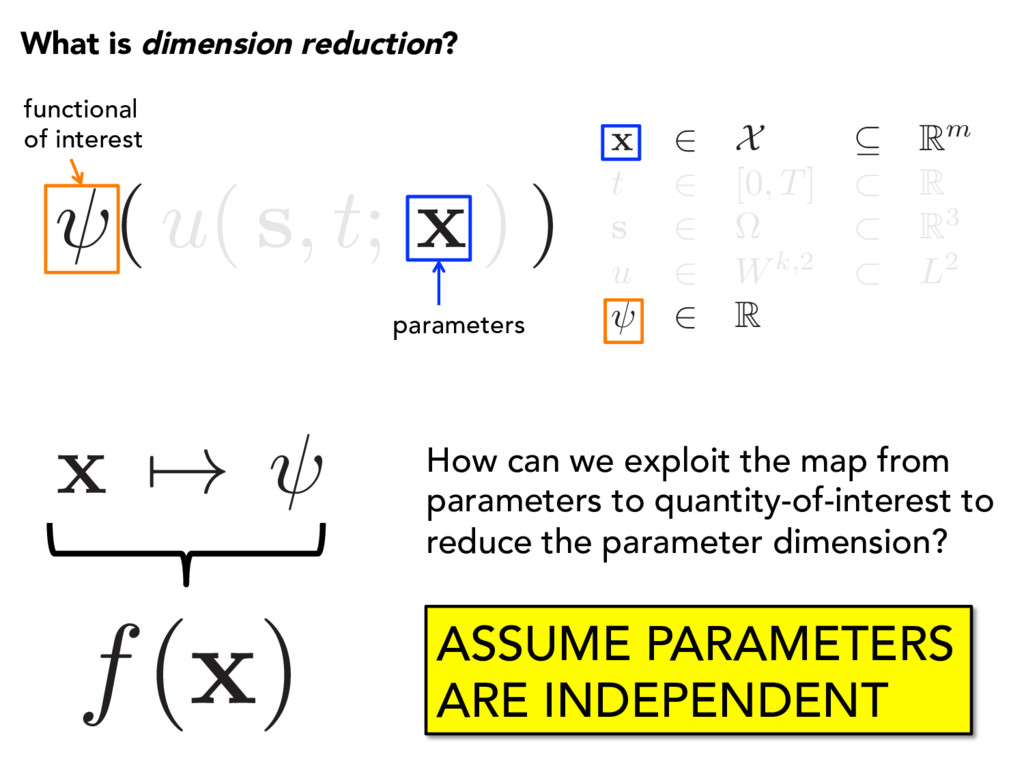
X ✓ Rm t 2 [0, T] ⇢ R s 2 ⌦ ⇢ R3 u 2 Wk,2 ⇢ L2 2 R functional of interest What is dimension reduction? x 7! How can we exploit the map from parameters to quantity-of-interest to reduce the parameter dimension? f( x ) parameters ASSUME PARAMETERS ARE INDEPENDENT
10 points per dimension) Time for parameter study (at 1 second per run) 1 10 10 sec 2 100 ~ 1.6 min 3 1,000 ~ 16 min 4 10,000 ~ 2.7 hours 5 100,000 ~ 1.1 days 6 1,000,000 ~ 1.6 weeks … … … 20 1e20 3 trillion years (240x age of the universe) REDUCED-ORDER MODELS or PARALLEL PROCESSING
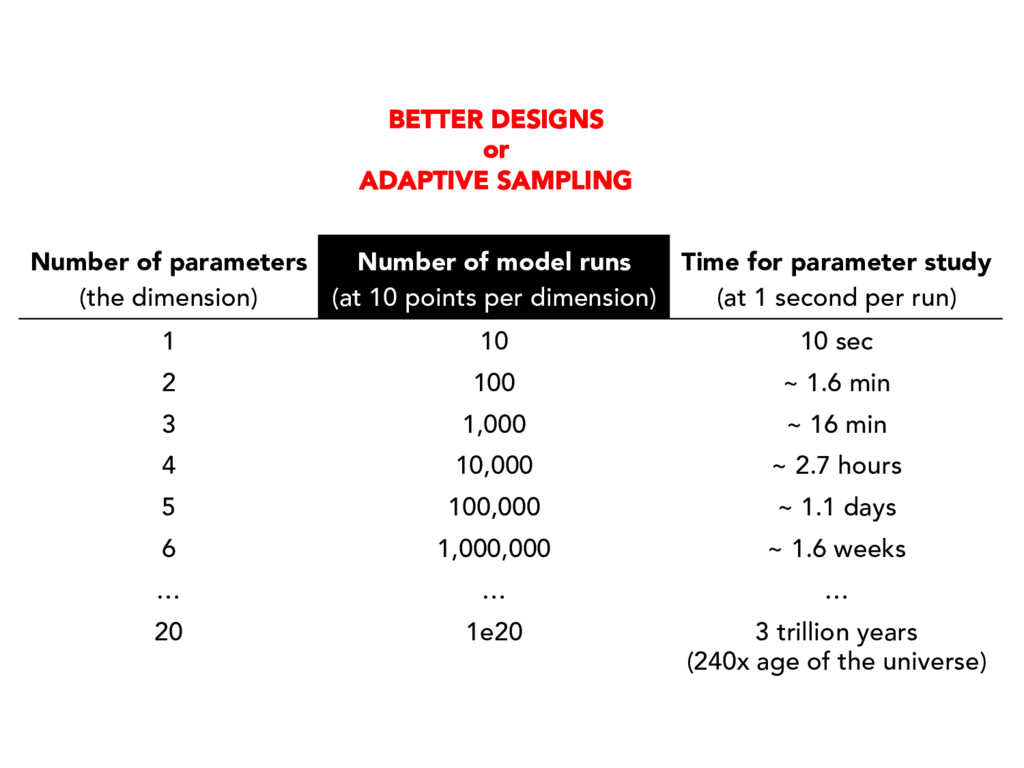
10 points per dimension) Time for parameter study (at 1 second per run) 1 10 10 sec 2 100 ~ 1.6 min 3 1,000 ~ 16 min 4 10,000 ~ 2.7 hours 5 100,000 ~ 1.1 days 6 1,000,000 ~ 1.6 weeks … … … 20 1e20 3 trillion years (240x age of the universe) BETTER DESIGNS or ADAPTIVE SAMPLING
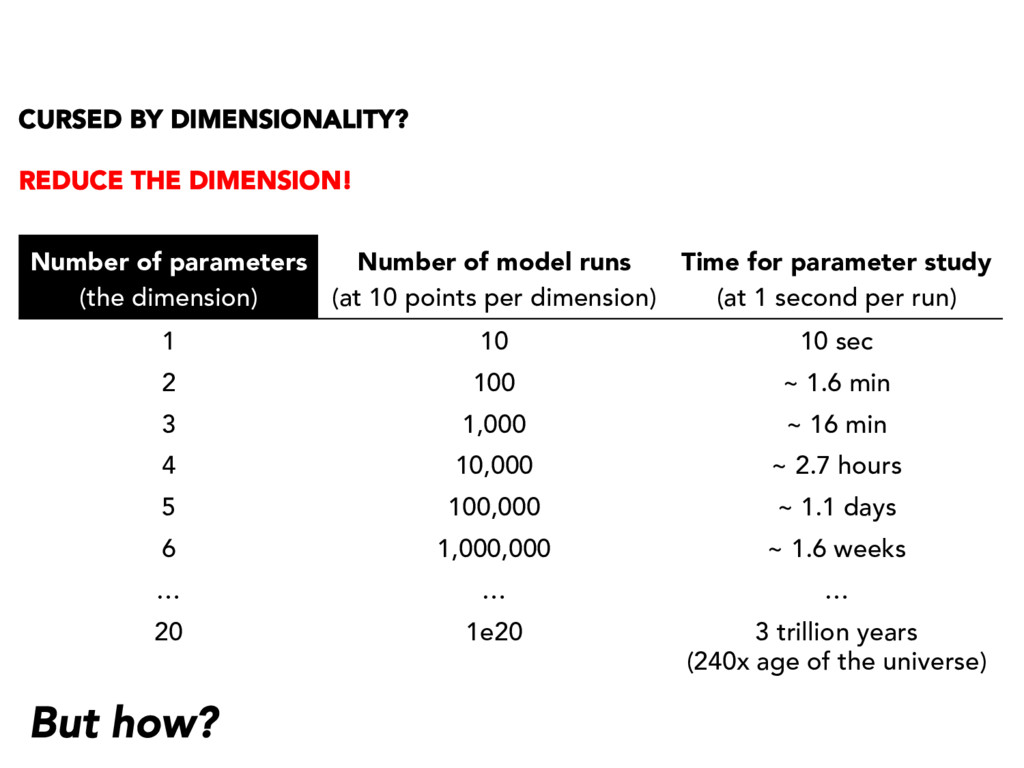
10 points per dimension) Time for parameter study (at 1 second per run) 1 10 10 sec 2 100 ~ 1.6 min 3 1,000 ~ 16 min 4 10,000 ~ 2.7 hours 5 100,000 ~ 1.1 days 6 1,000,000 ~ 1.6 weeks … … … 20 1e20 3 trillion years (240x age of the universe) But how? CURSED BY DIMENSIONALITY? REDUCE THE DIMENSION!
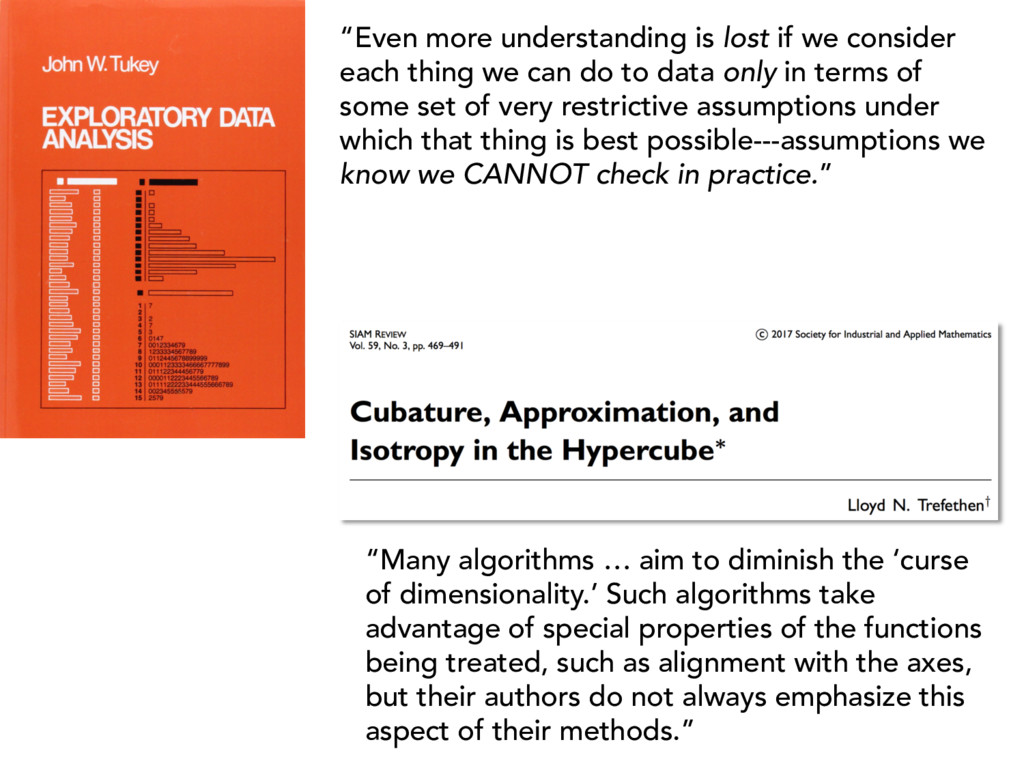
we can do to data only in terms of some set of very restrictive assumptions under which that thing is best possible---assumptions we know we CANNOT check in practice.” “Many algorithms … aim to diminish the ‘curse of dimensionality.’ Such algorithms take advantage of special properties of the functions being treated, such as alignment with the axes, but their authors do not always emphasize this aspect of their methods.”
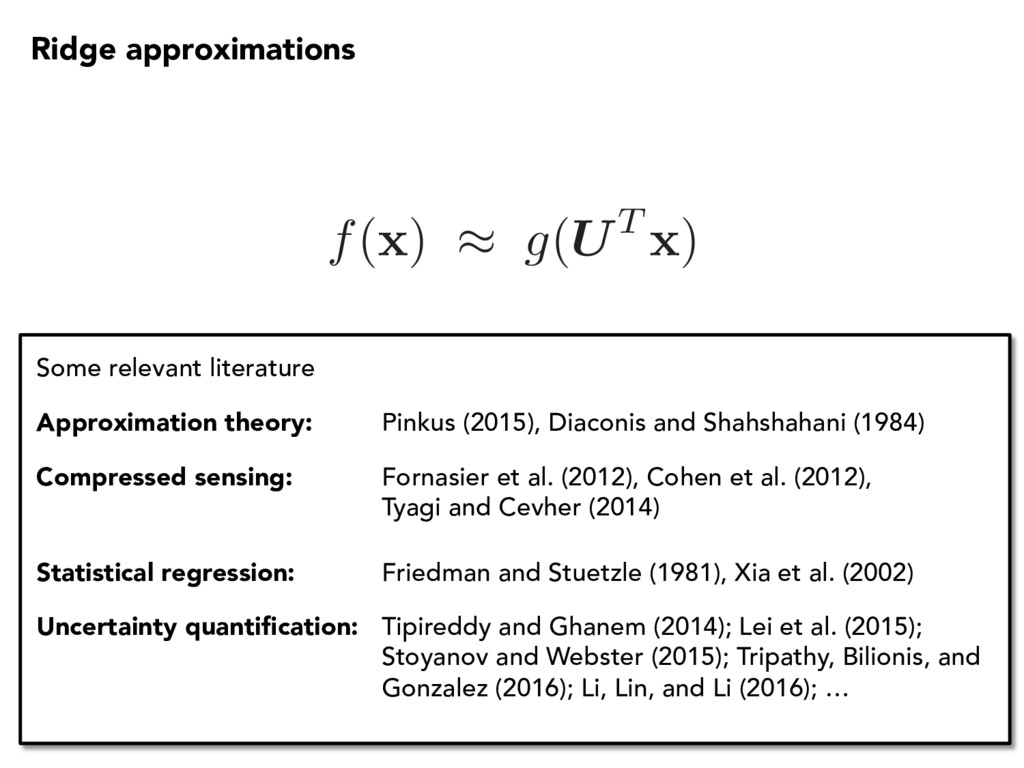
Approximation theory: Pinkus (2015), Diaconis and Shahshahani (1984) Compressed sensing: Fornasier et al. (2012), Cohen et al. (2012), Tyagi and Cevher (2014) Statistical regression: Friedman and Stuetzle (1981), Xia et al. (2002) Uncertainty quantification: Tipireddy and Ghanem (2014); Lei et al. (2015); Stoyanov and Webster (2015); Tripathy, Bilionis, and Gonzalez (2016); Li, Lin, and Li (2016); … Ridge approximations
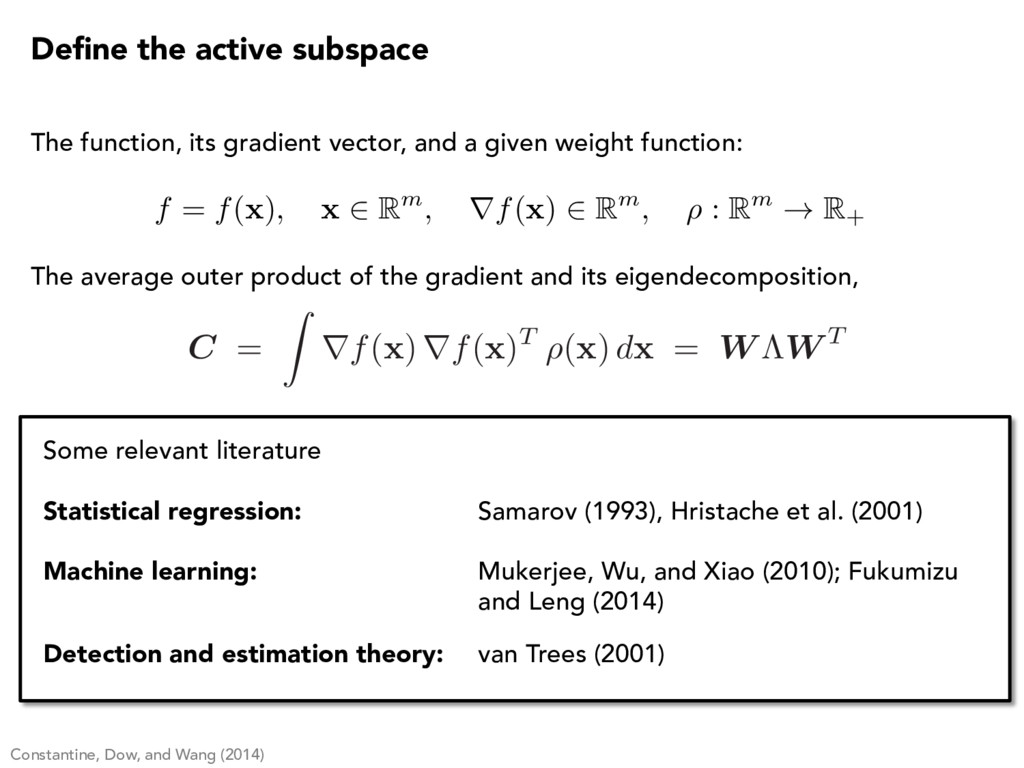
x ) d x = W ⇤W T Define the active subspace The average outer product of the gradient and its eigendecomposition, Partition the eigendecomposition, Rotate and separate the coordinates, ⇤ = ⇤1 ⇤2 , W = ⇥ W 1 W 2 ⇤ , W 1 2 Rm⇥n x = W W T x = W 1W T 1 x + W 2W T 2 x = W 1y + W 2z active variables inactive variables f = f( x ), x 2 Rm, rf( x ) 2 Rm, ⇢ : Rm ! R + Constantine, Dow, and Wang (2014) Some relevant literature Statistical regression: Samarov (1993), Hristache et al. (2001) Machine learning: Mukerjee, Wu, and Xiao (2010); Fukumizu and Leng (2014) Detection and estimation theory: van Trees (2001) The function, its gradient vector, and a given weight function:
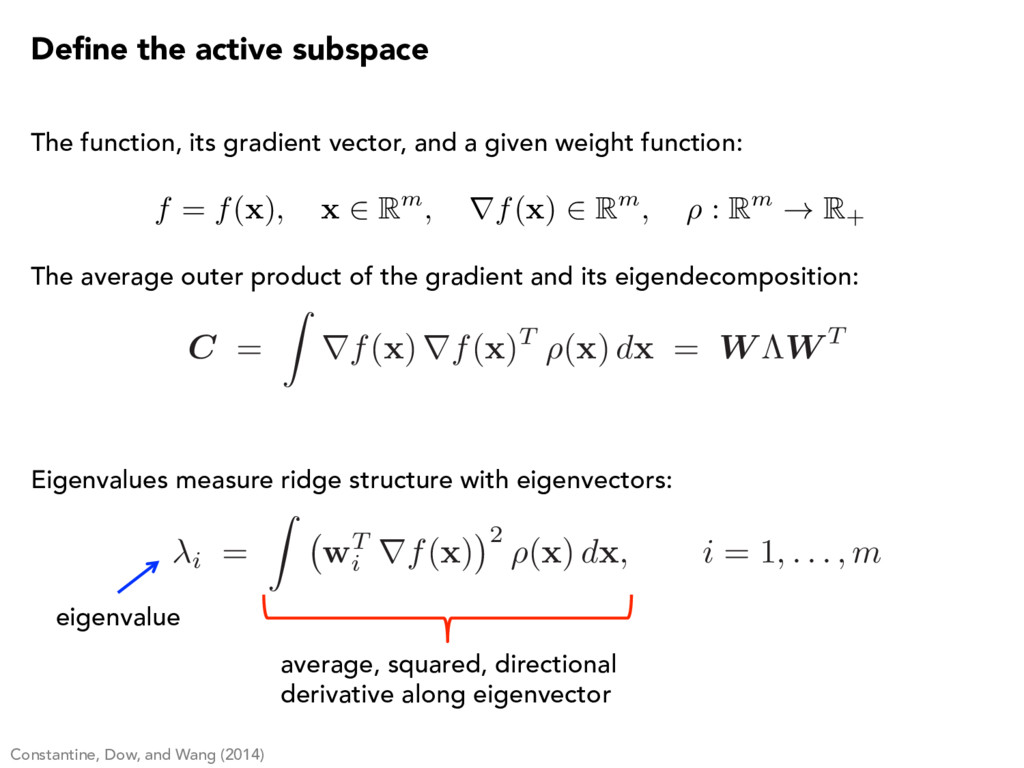
x ) d x = W ⇤W T Define the active subspace The function, its gradient vector, and a given weight function: The average outer product of the gradient and its eigendecomposition: f = f( x ), x 2 Rm, rf( x ) 2 Rm, ⇢ : Rm ! R + Constantine, Dow, and Wang (2014) i = Z w T i rf( x ) 2 ⇢( x ) d x , i = 1, . . . , m average, squared, directional derivative along eigenvector eigenvalue Eigenvalues measure ridge structure with eigenvectors:
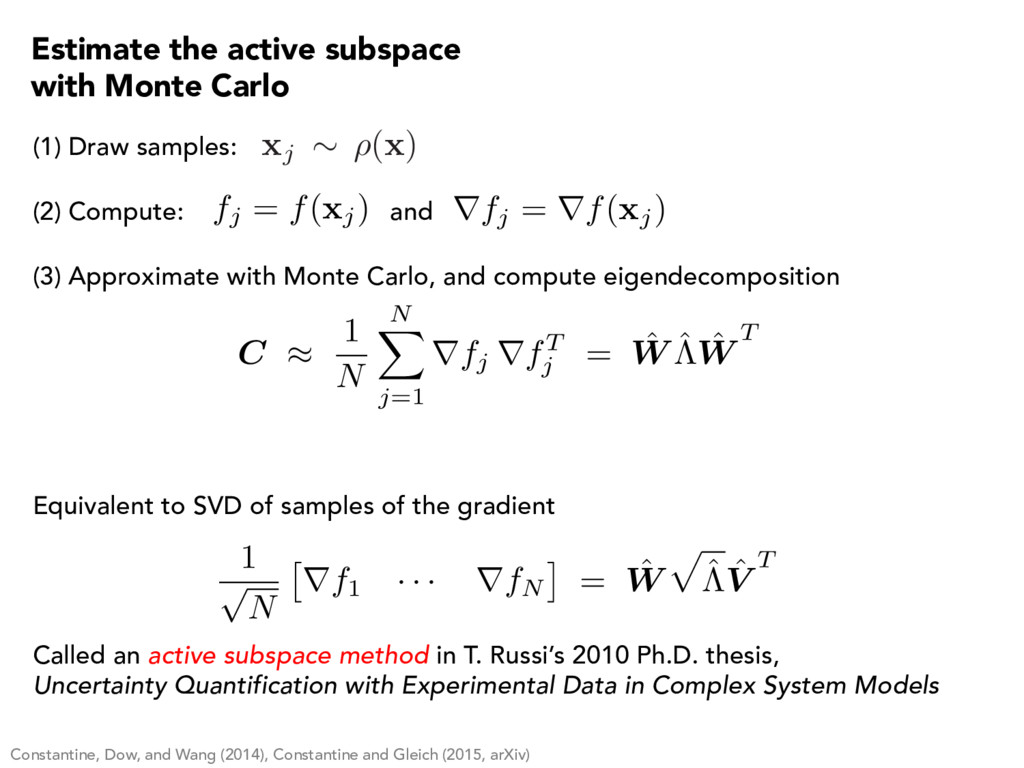
(3) Approximate with Monte Carlo, and compute eigendecomposition Equivalent to SVD of samples of the gradient Called an active subspace method in T. Russi’s 2010 Ph.D. thesis, Uncertainty Quantification with Experimental Data in Complex System Models C ⇡ 1 N N X j=1 rfj rfT j = ˆ W ˆ ⇤ ˆ W T 1 p N ⇥ rf1 · · · rfN ⇤ = ˆ W p ˆ ⇤ ˆ V T rfj = rf( xj) Constantine, Dow, and Wang (2014), Constantine and Gleich (2015, arXiv) xj ⇠ ⇢( x ) Estimate the active subspace with Monte Carlo
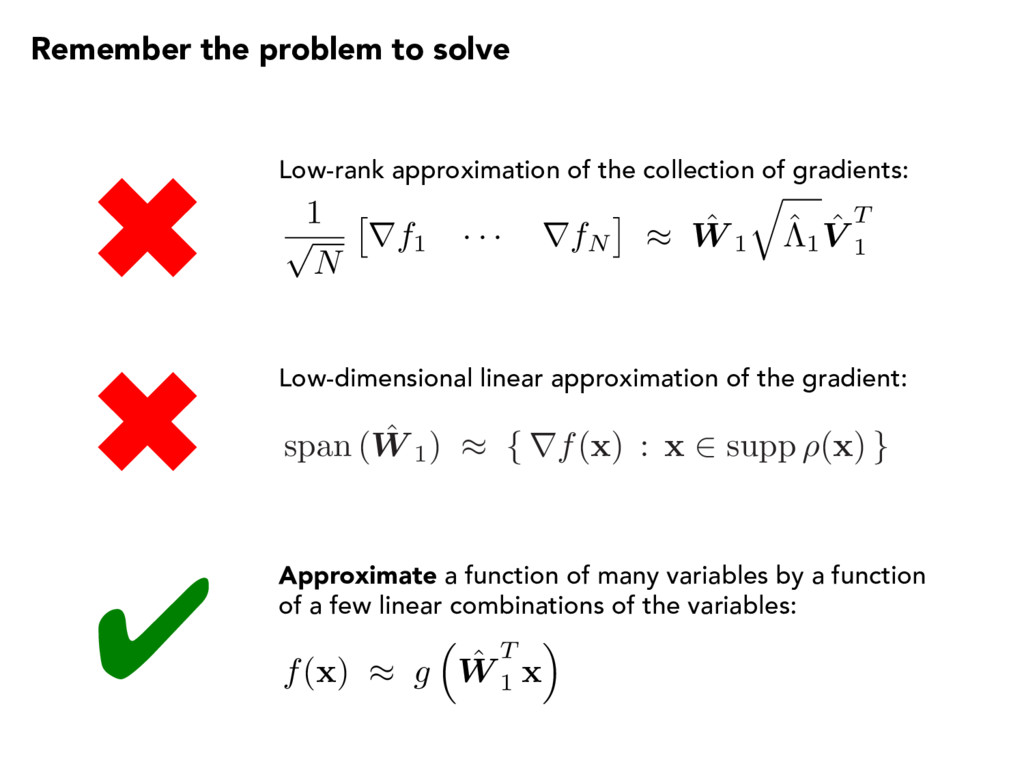
⇡ ˆ W 1 q ˆ ⇤1 ˆ V T 1 Low-rank approximation of the collection of gradients: Low-dimensional linear approximation of the gradient: f( x ) ⇡ g ⇣ ˆ W T 1 x ⌘ Approximate a function of many variables by a function of a few linear combinations of the variables: ✔ ✖ ✖ Remember the problem to solve span ( ˆ W 1) ⇡ { rf( x ) : x 2 supp ⇢( x ) }
subspace f( x ) µ(W T 1 x ) L2(⇢) C ( n+1 + · · · + m)1 2 Constantine, Dow, and Wang (2014) But is that the smallest error? The eigenvalues measure the approximation error
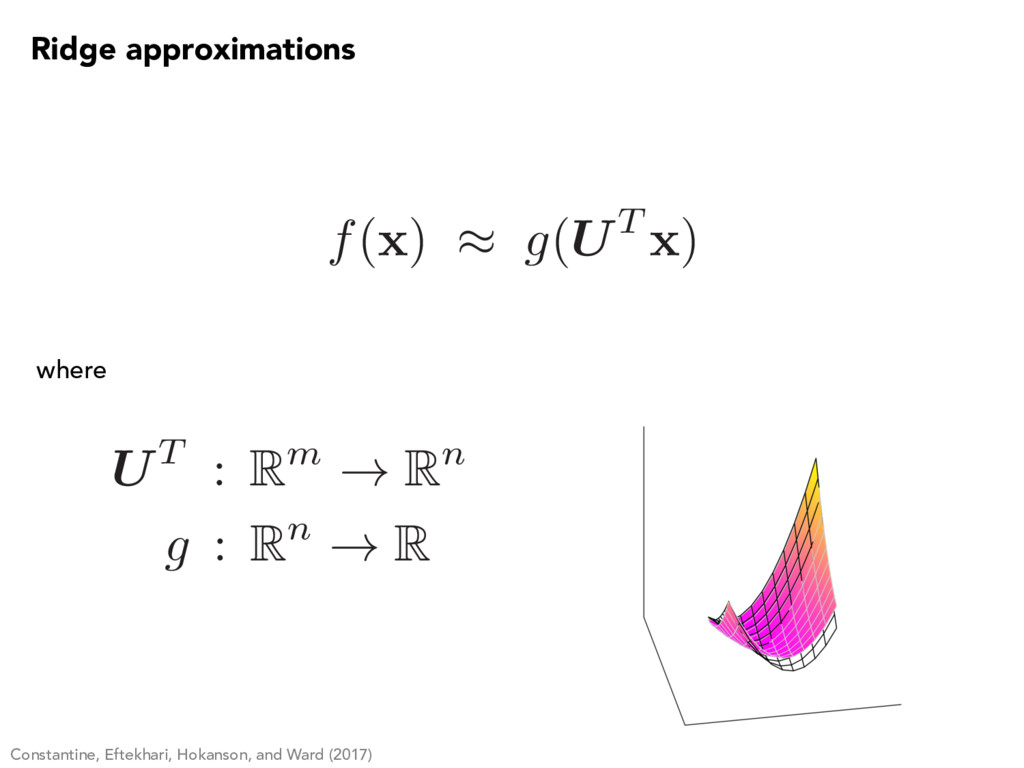
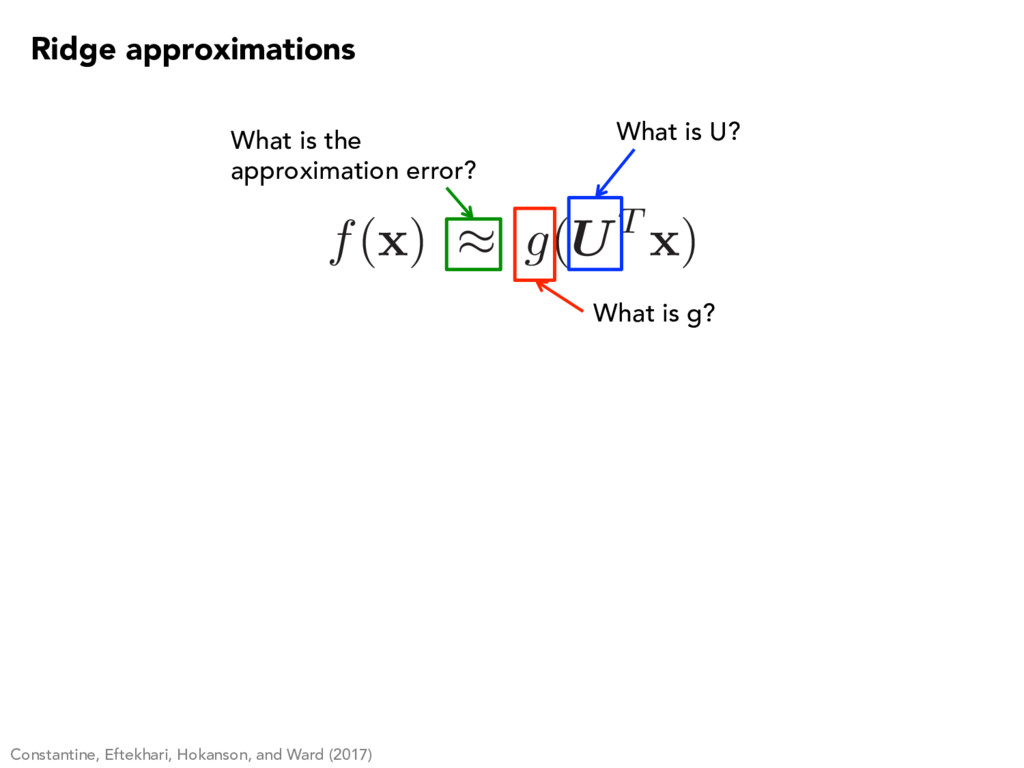
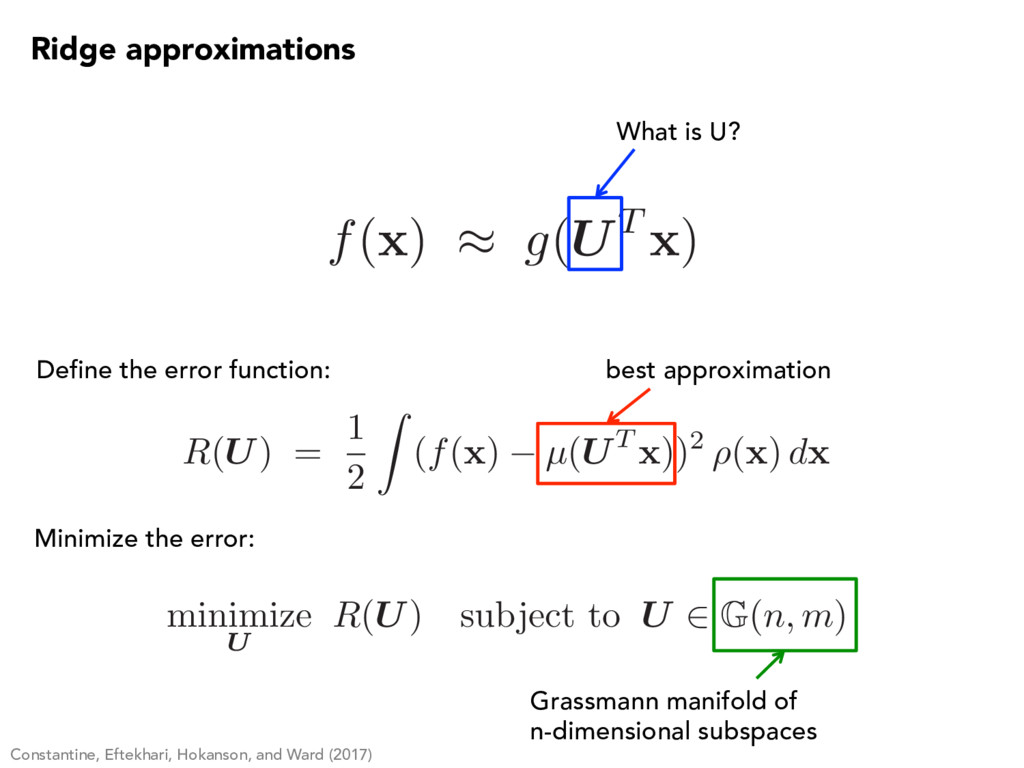
Define the error function: R(U) = 1 2 Z (f( x ) µ(UT x ))2 ⇢( x ) d x Minimize the error: minimize U R ( U ) subject to U 2 G ( n, m ) Grassmann manifold of n-dimensional subspaces Constantine, Eftekhari, Hokanson, and Ward (2017) Ridge approximations best approximation
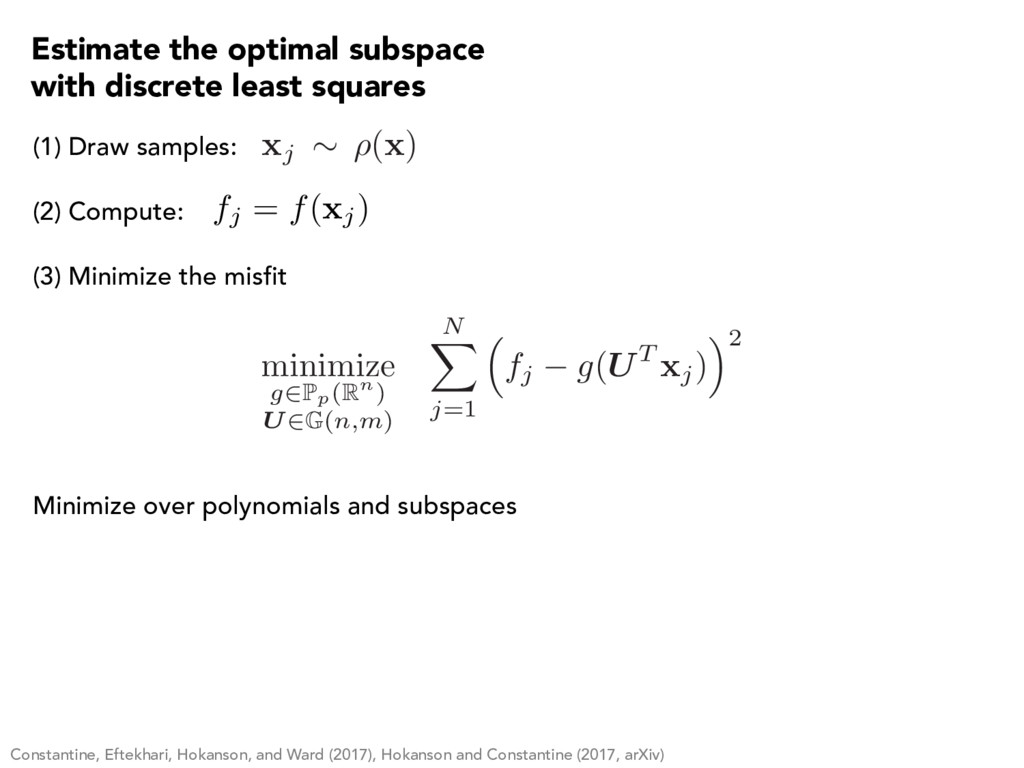
Minimize the misfit Minimize over polynomials and subspaces Constantine, Eftekhari, Hokanson, and Ward (2017), Hokanson and Constantine (2017, arXiv) xj ⇠ ⇢( x ) Estimate the optimal subspace with discrete least squares minimize g2P p(Rn) U2G(n,m) N X j=1 ⇣ fj g(UT xj) ⌘2
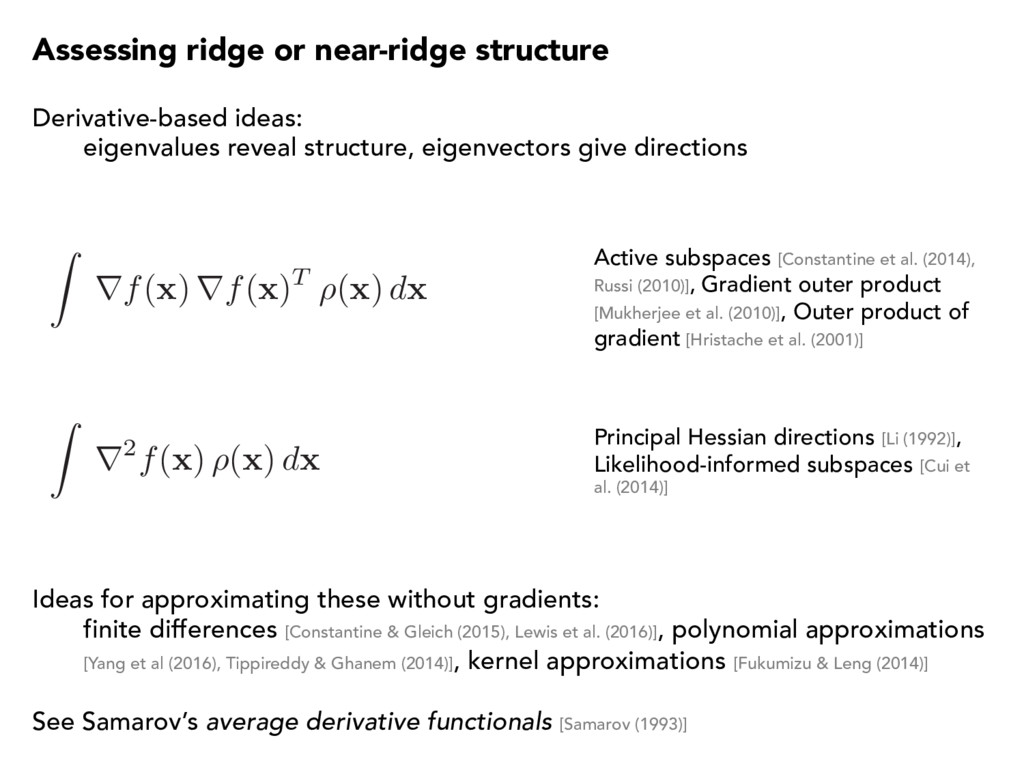
x )T ⇢( x ) d x Derivative-based ideas: eigenvalues reveal structure, eigenvectors give directions Active subspaces [Constantine et al. (2014), Russi (2010)], Gradient outer product [Mukherjee et al. (2010)], Outer product of gradient [Hristache et al. (2001)] Z r2f( x ) ⇢( x ) d x Principal Hessian directions [Li (1992)], Likelihood-informed subspaces [Cui et al. (2014)] Ideas for approximating these without gradients: finite differences [Constantine & Gleich (2015), Lewis et al. (2016)], polynomial approximations [Yang et al (2016), Tippireddy & Ghanem (2014)], kernel approximations [Fukumizu & Leng (2014)] See Samarov’s average derivative functionals [Samarov (1993)]
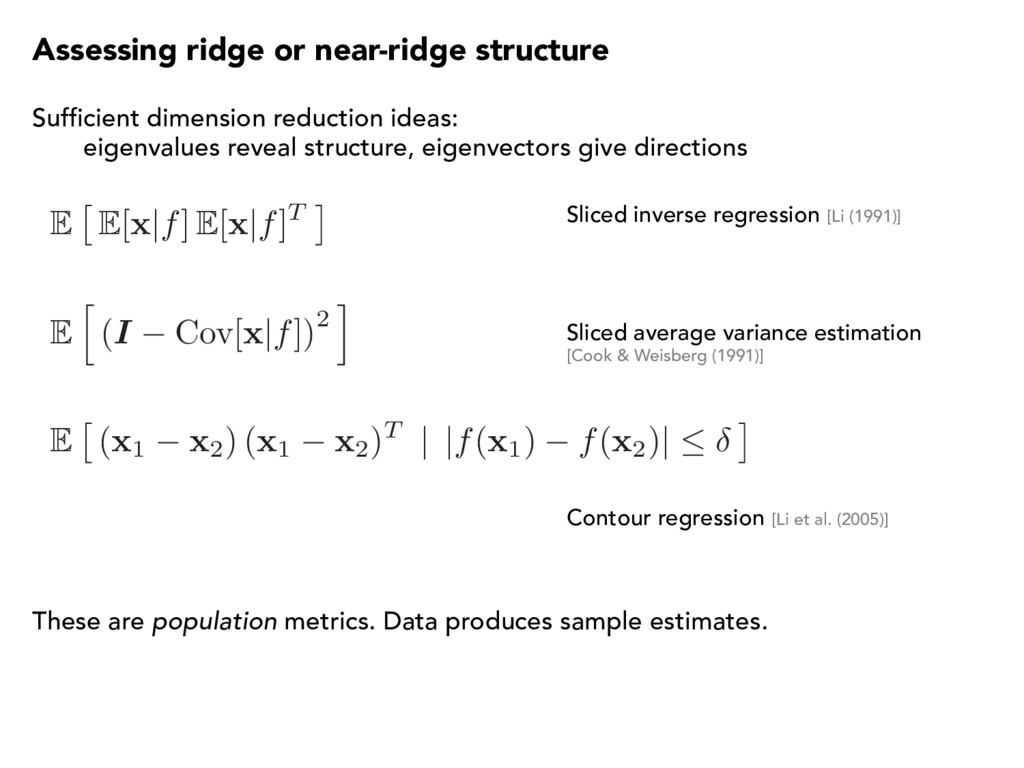
reveal structure, eigenvectors give directions Sliced inverse regression [Li (1991)] Sliced average variance estimation [Cook & Weisberg (1991)] E ⇥ E[ x |f] E[ x |f]T ⇤ E h ( I Cov[x |f ]) 2 i E ⇥ ( x1 x2) ( x1 x2)T | |f( x1) f( x2)| ⇤ Contour regression [Li et al. (2005)] These are population metrics. Data produces sample estimates.
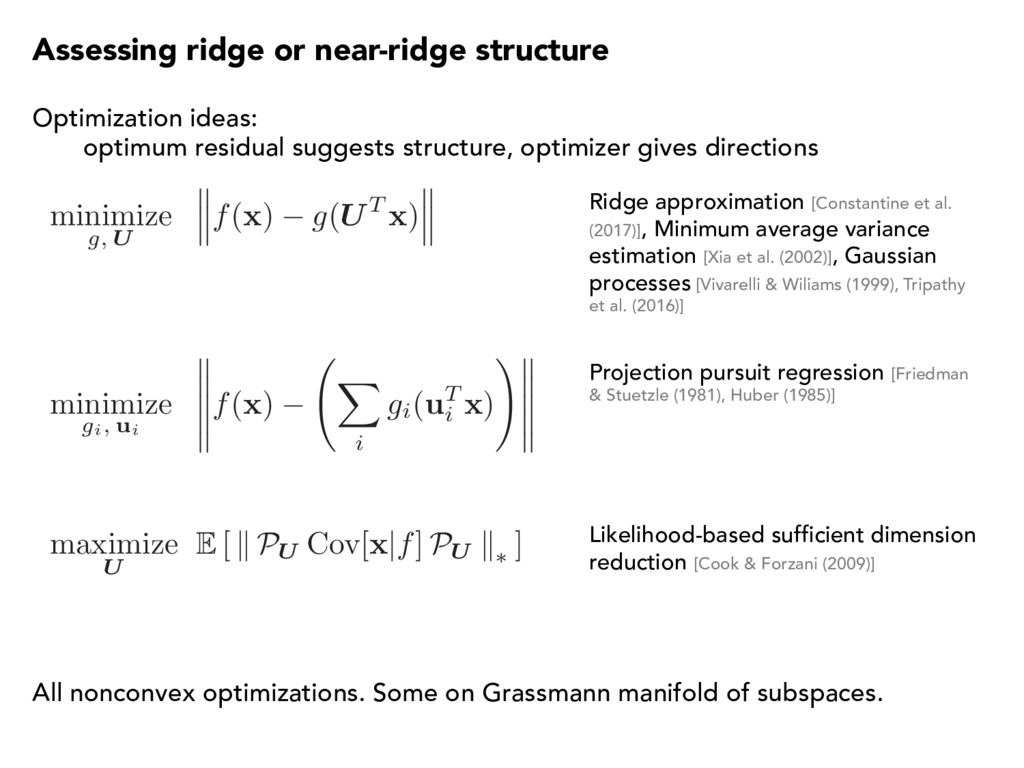
ridge or near-ridge structure Optimization ideas: optimum residual suggests structure, optimizer gives directions Ridge approximation [Constantine et al. (2017)], Minimum average variance estimation [Xia et al. (2002)], Gaussian processes [Vivarelli & Wiliams (1999), Tripathy et al. (2016)] Projection pursuit regression [Friedman & Stuetzle (1981), Huber (1985)] Likelihood-based sufficient dimension reduction [Cook & Forzani (2009)] minimize gi, ui f( x ) X i gi( u T i x ) ! maximize U E [ k PU Cov[x |f ] PU k ⇤ ] All nonconvex optimizations. Some on Grassmann manifold of subspaces.
(2) Insights + which variables are important (3) Discoverable / checkable + eigenvalues + non-residual metrics: + plots in 1 and 2d E[ Var[ f | UT x ] ] Why I like ridge structure
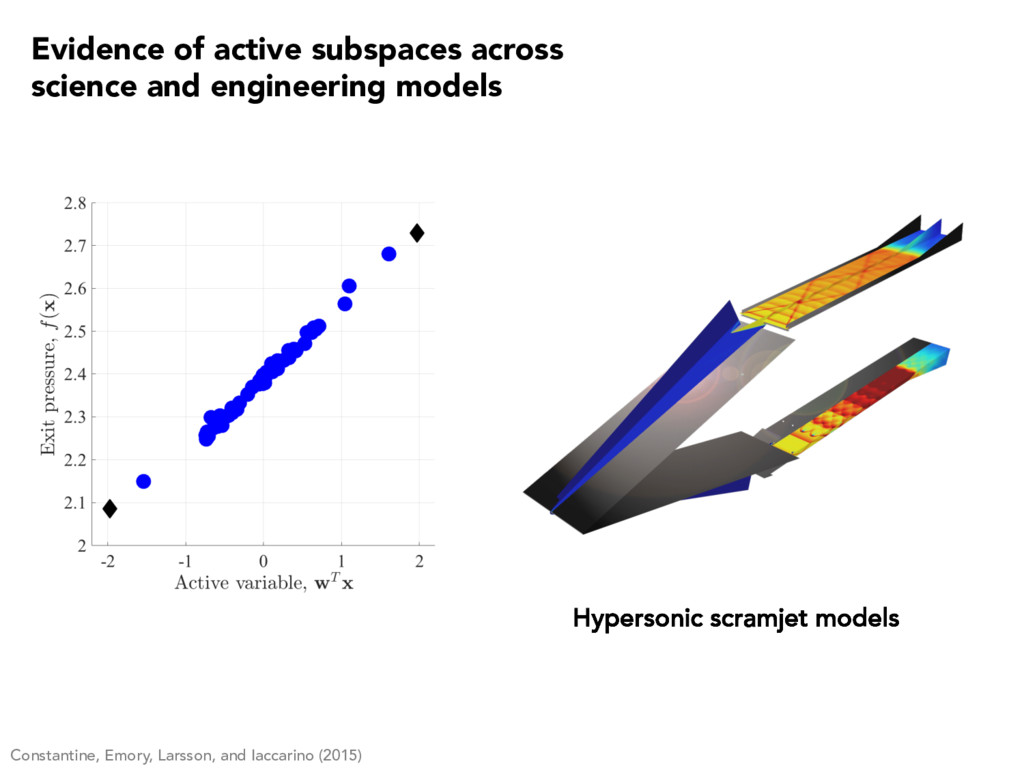
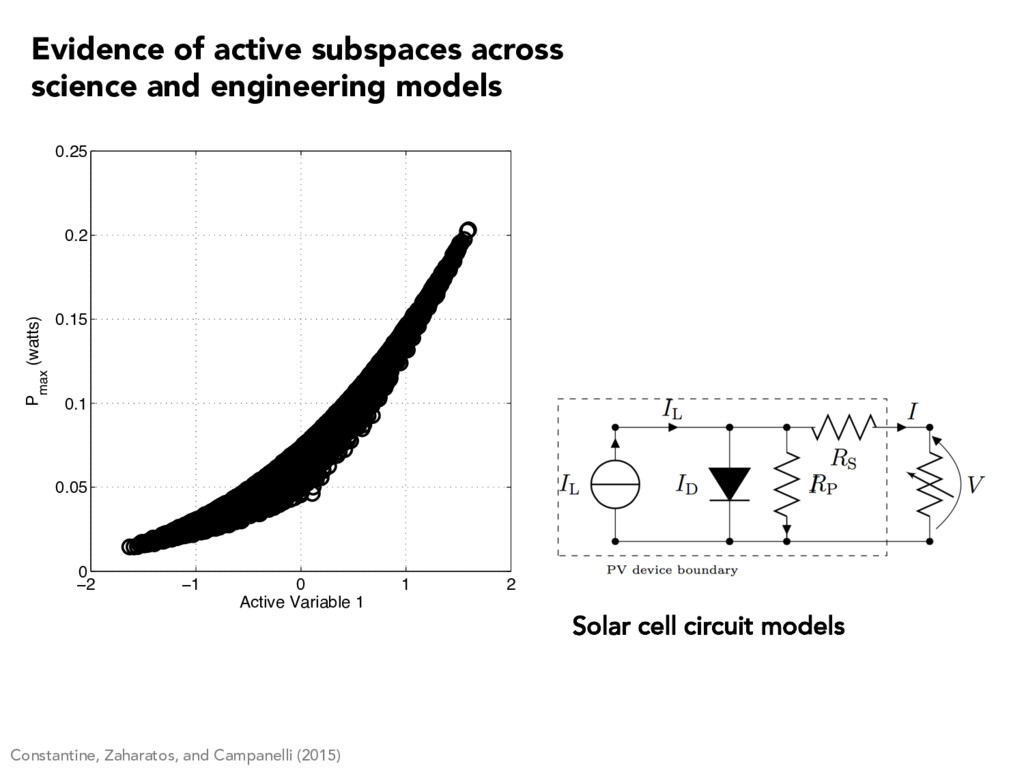
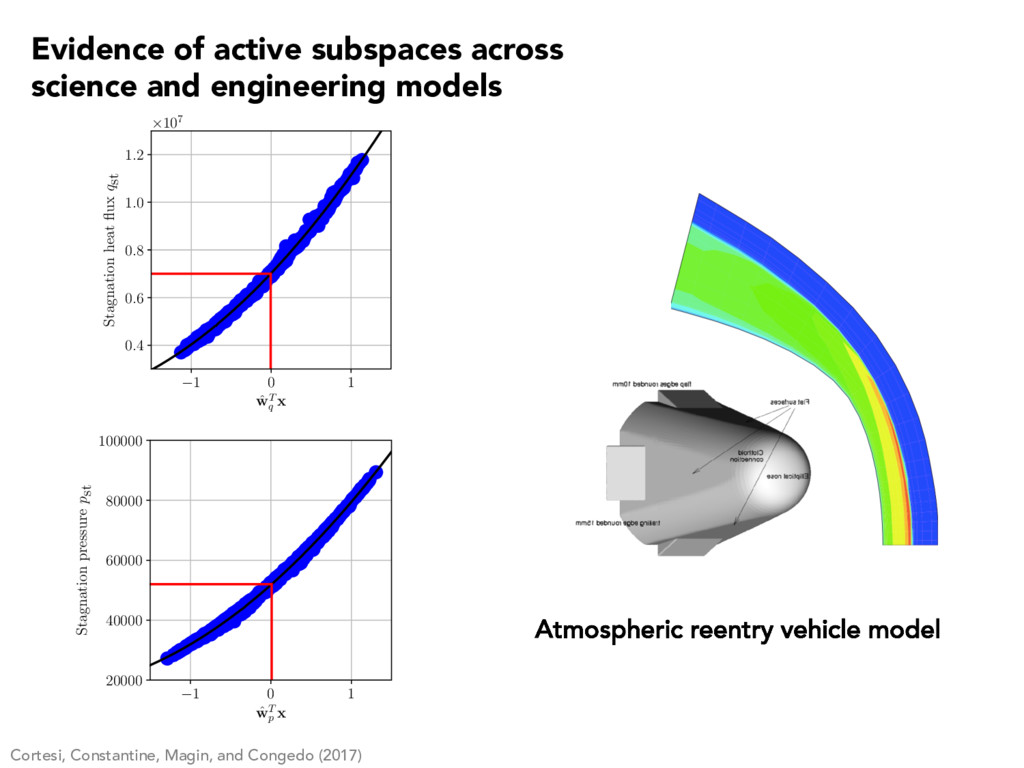
0.05 0.1 0.15 0.2 0.25 Active Variable 1 P max (watts) Constantine, Zaharatos, and Campanelli (2015) Evidence of active subspaces across science and engineering models
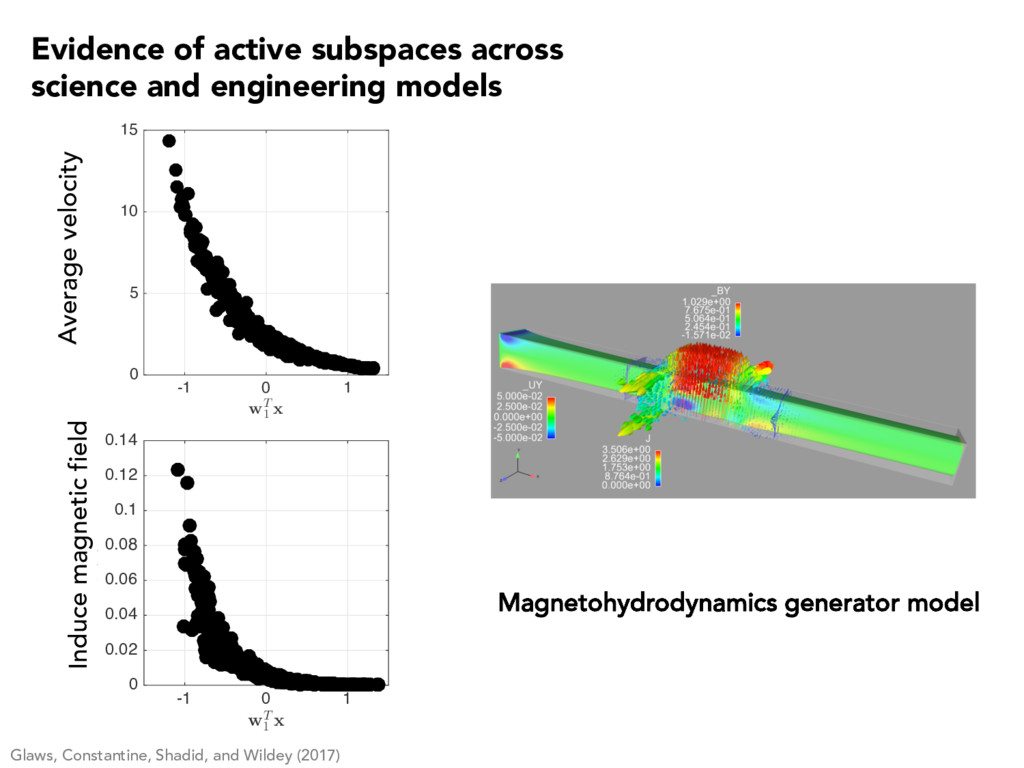
5 10 15 f(x) Average velocity Glaws, Constantine, Shadid, and Wildey (2017) Evidence of active subspaces across science and engineering models -1 0 1 wT 1 x 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 f(x) Induce magnetic field
3.70 Voltage [V] Constantine and Doostan (2017) Evidence of active subspaces across science and engineering models 2 0 2 wT x 2.0 2.2 Capacity [mAh·cm 2]
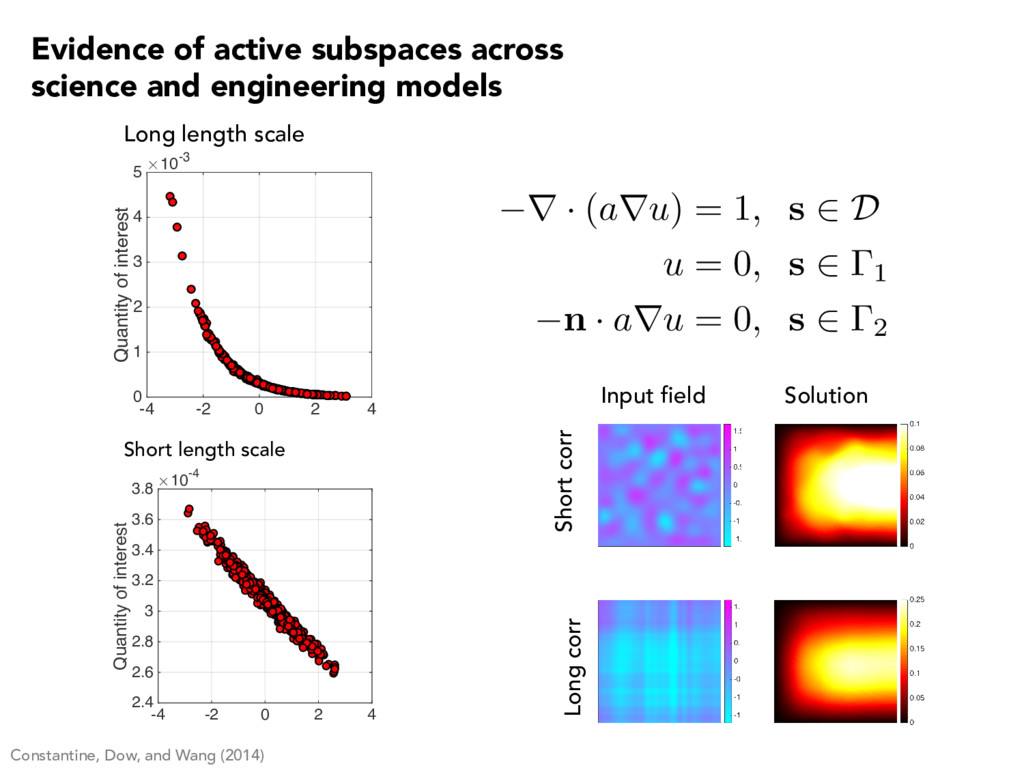
1 2 3 4 5 -4 -2 0 2 4 Quantity of interest #10-4 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 Long length scale Short length scale Evidence of active subspaces across science and engineering models Constantine, Dow, and Wang (2014) r · (aru) = 1, s 2 D u = 0, s 2 1 n · aru = 0, s 2 2 Input field Solution Short corr Long corr
subspaces? Why do all those models exhibit similar structure? What if my model doesn’t fit your setup? (no gradients, multiple outputs, correlated inputs, …) PAUL CONSTANTINE Assistant Professor University of Colorado Boulder activesubspaces.org! @DrPaulynomial! QUESTIONS? Active Subspaces SIAM (2015)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}