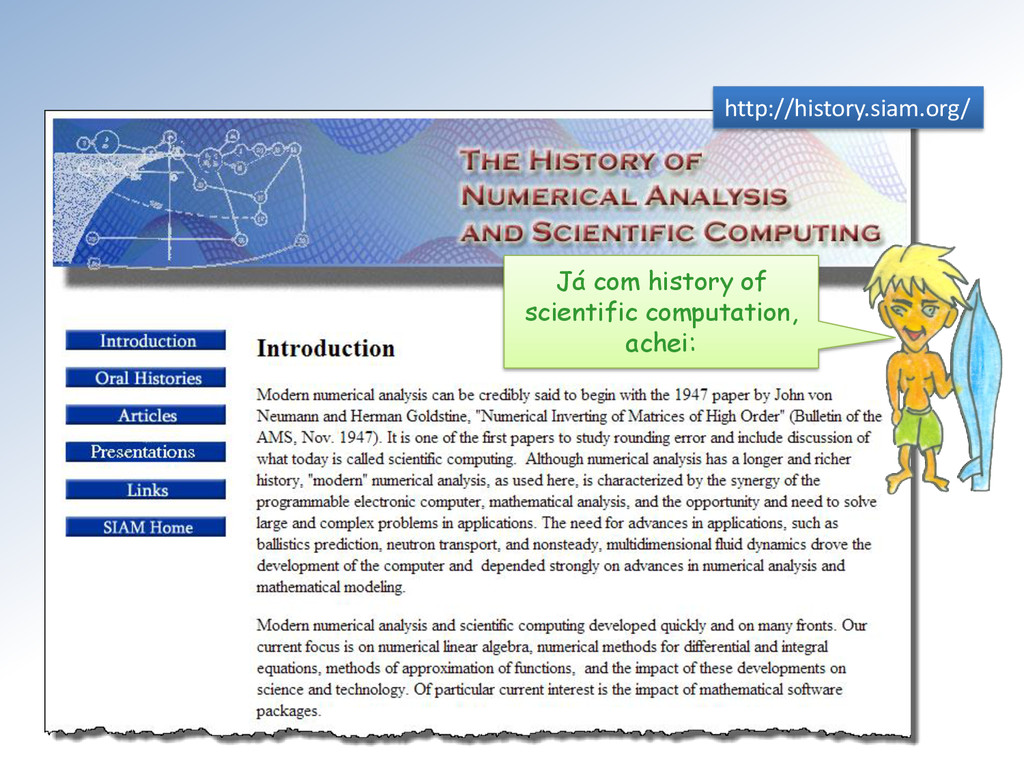
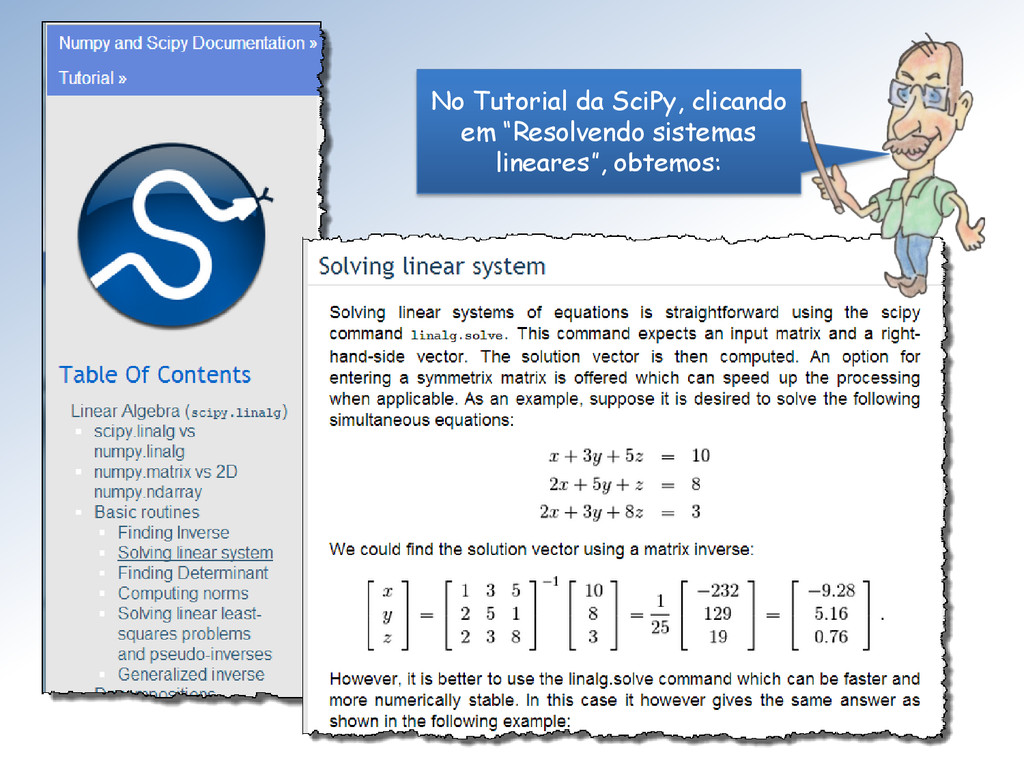
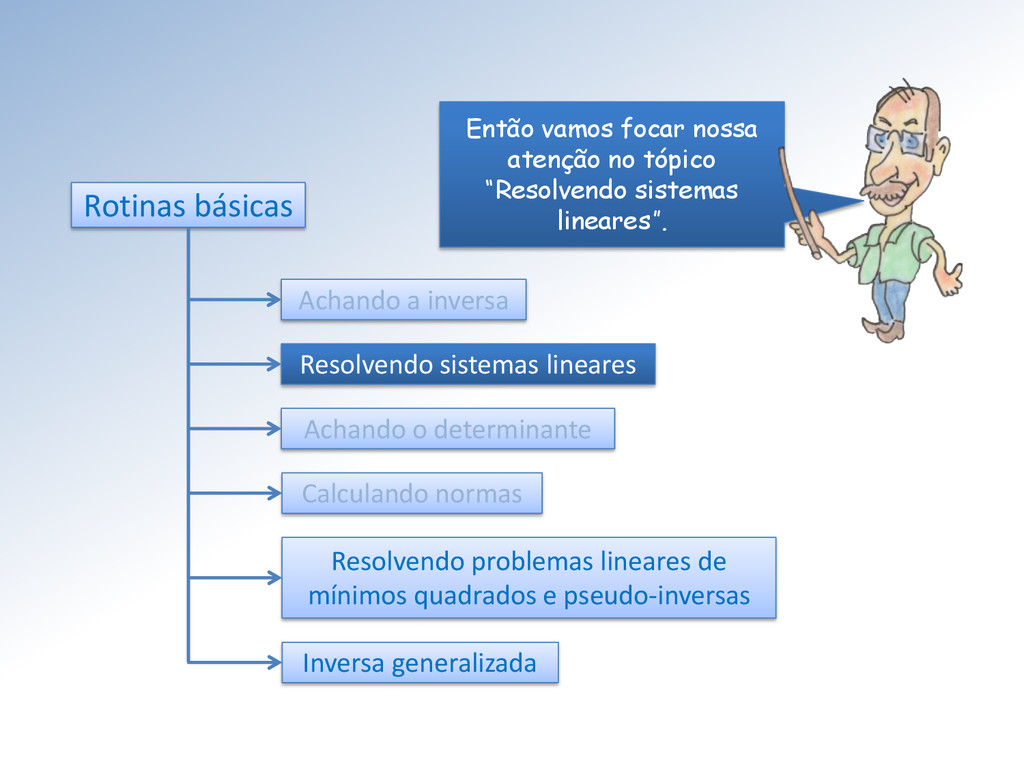
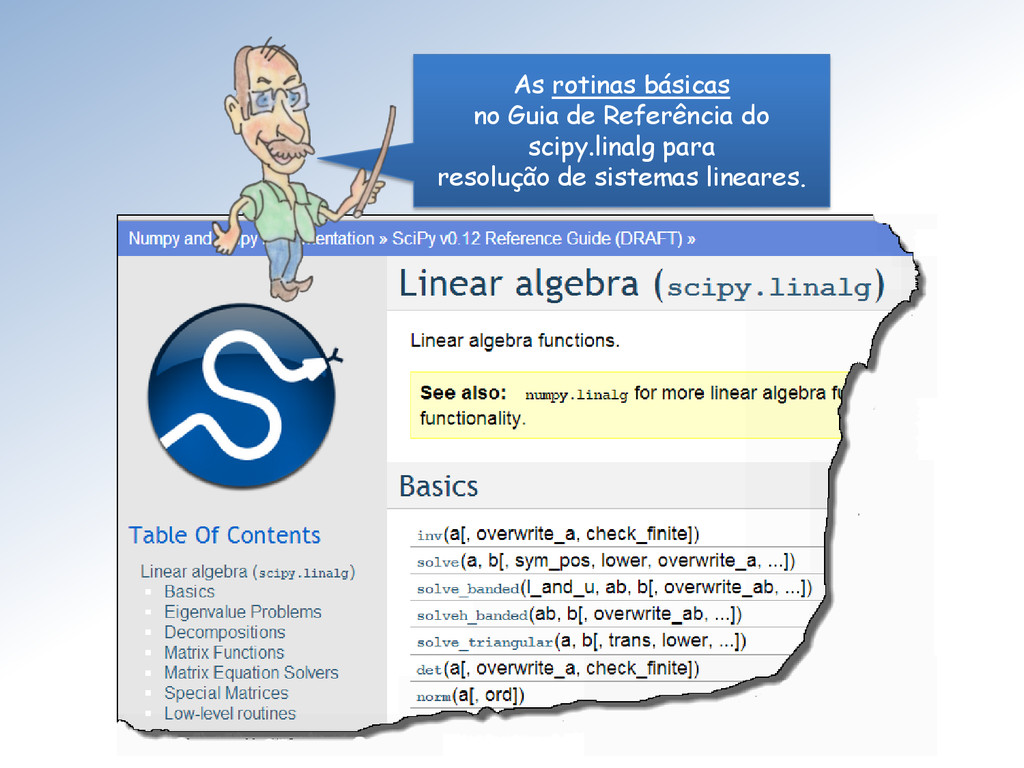
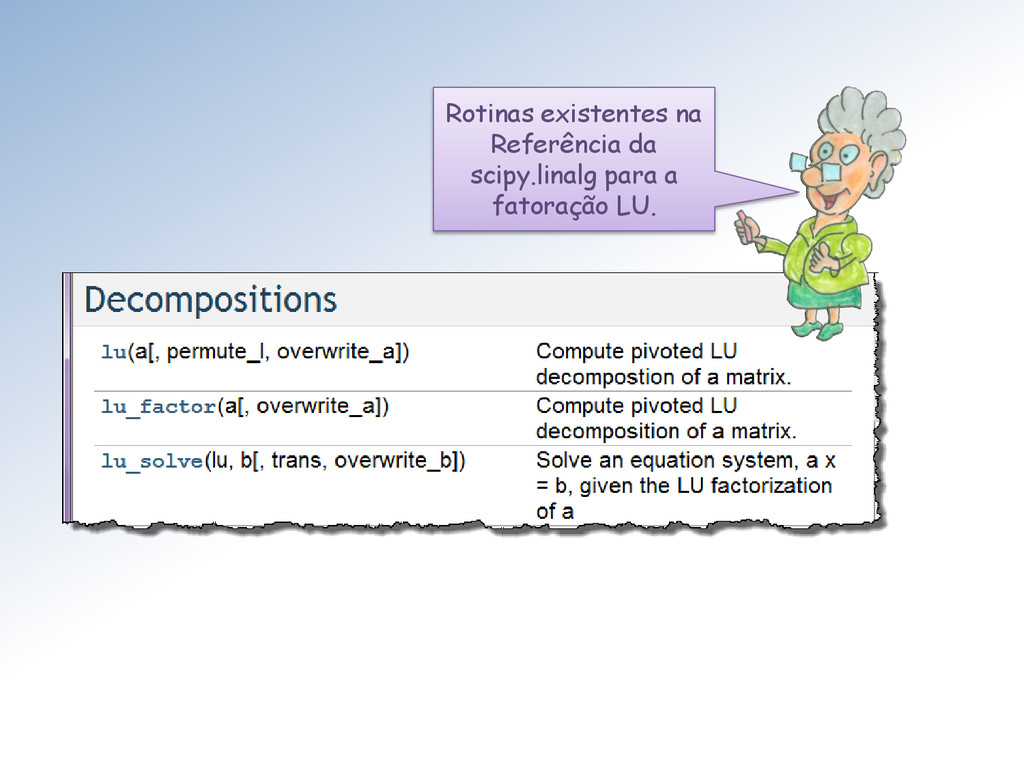
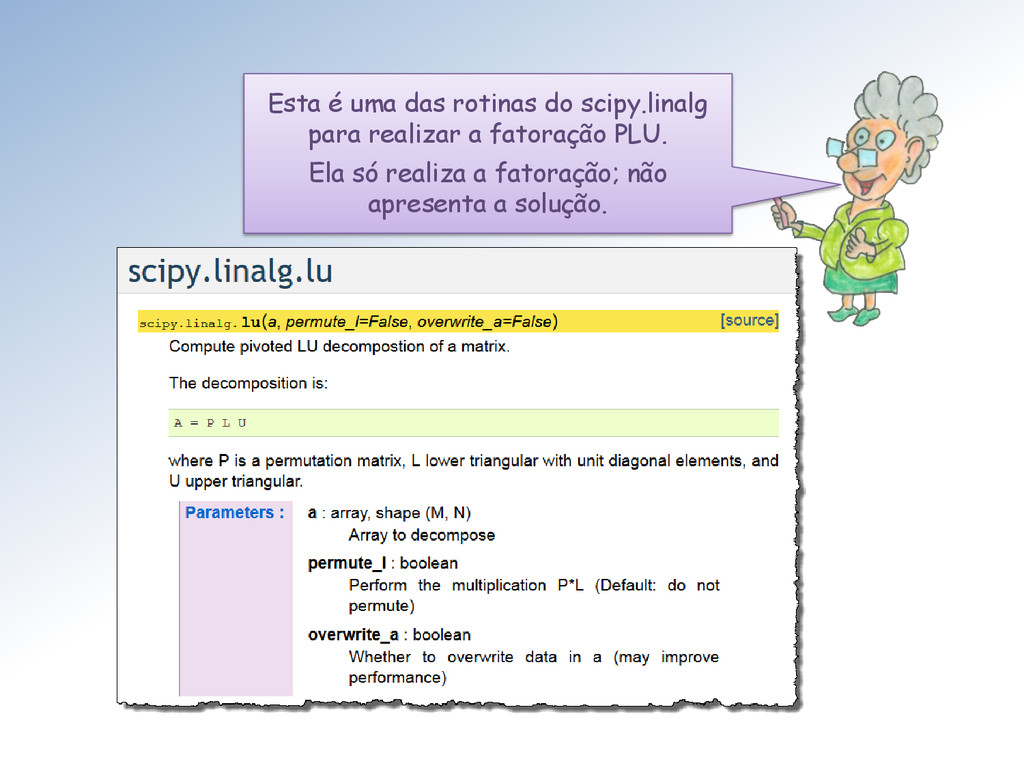
Inicio apresentando o site de História da Análise Numérica e Computação Científica da SIAM. Depois apresento o NetLib, a BLAS e a LAPACK. Em seguida volto para a scipy.linalg para mostrar como utilizar as diversas rotinas para resolver sistemas lineares.envolvendo matrizes com características particulares (simétricas, de banda, etc). Depois mostro a fatoração LU da sicpy.linalg, com suas diversas versões para matrizes com características particulares. Fecho com uma discussão sobre a resolução de sistemas lineares via determinantes.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
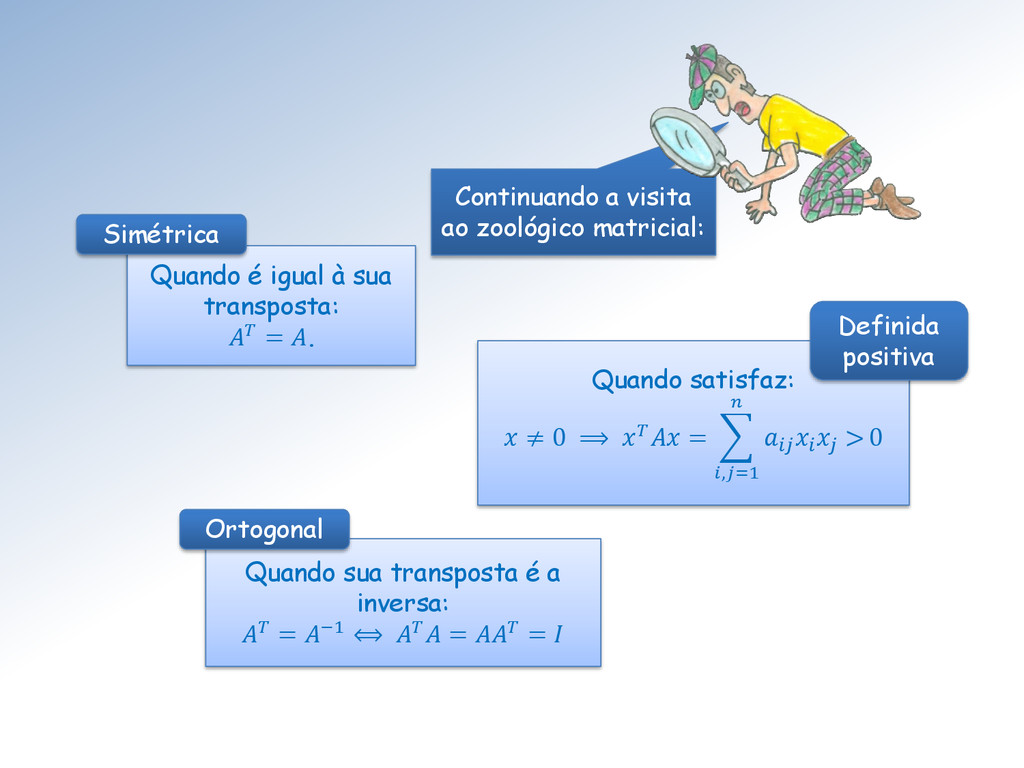
![Aliás existe toda uma fauna de matrizes = [ ]](https://files.speakerdeck.com/presentations/1f5d0360a1960131ed0a4e04b85186c1/slide_23.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Uma matriz = [ ] possui banda inferior k quando](https://files.speakerdeck.com/presentations/1f5d0360a1960131ed0a4e04b85186c1/slide_38.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Um zoológico bem complexo: A adjunta de = [ ],](https://files.speakerdeck.com/presentations/1f5d0360a1960131ed0a4e04b85186c1/slide_52.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}