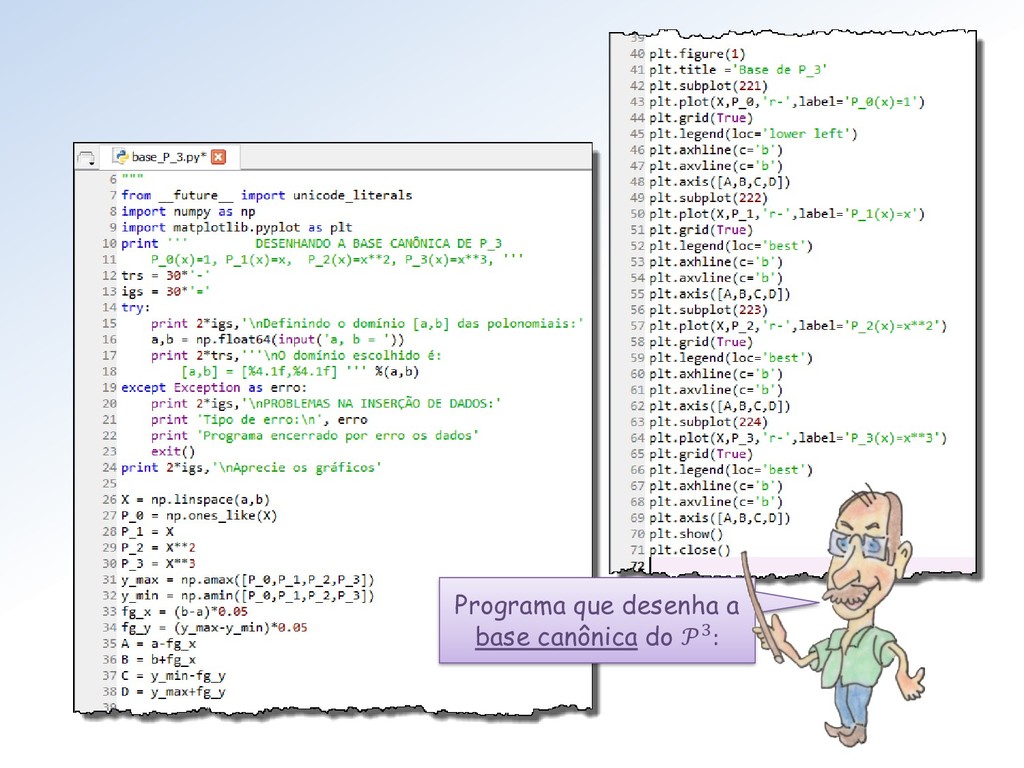
de grau menor ou igual a 2, é constituída pelas polinomiais: 0 () = 0 = 1, 1 () = 1 = , 2 () = 2 . A ideia é a mesma. Para a polinomial = 2.1 + 0.7 + 1.5 2 temos = 2.1 0 + 0.7 1 + 1.5 2
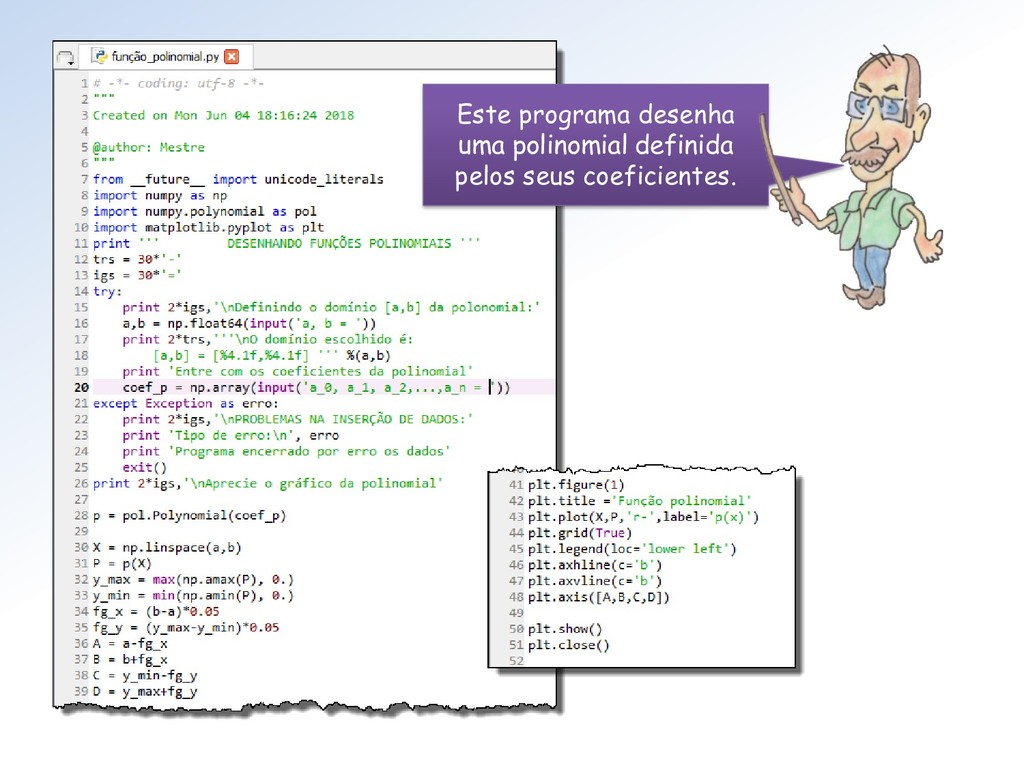
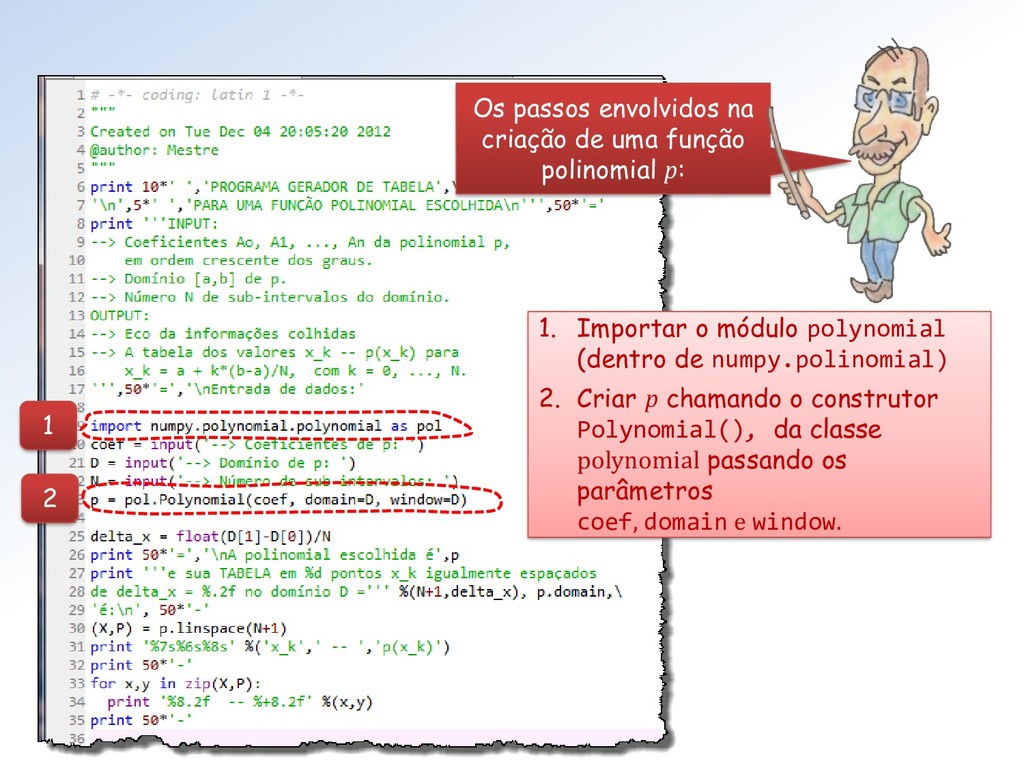
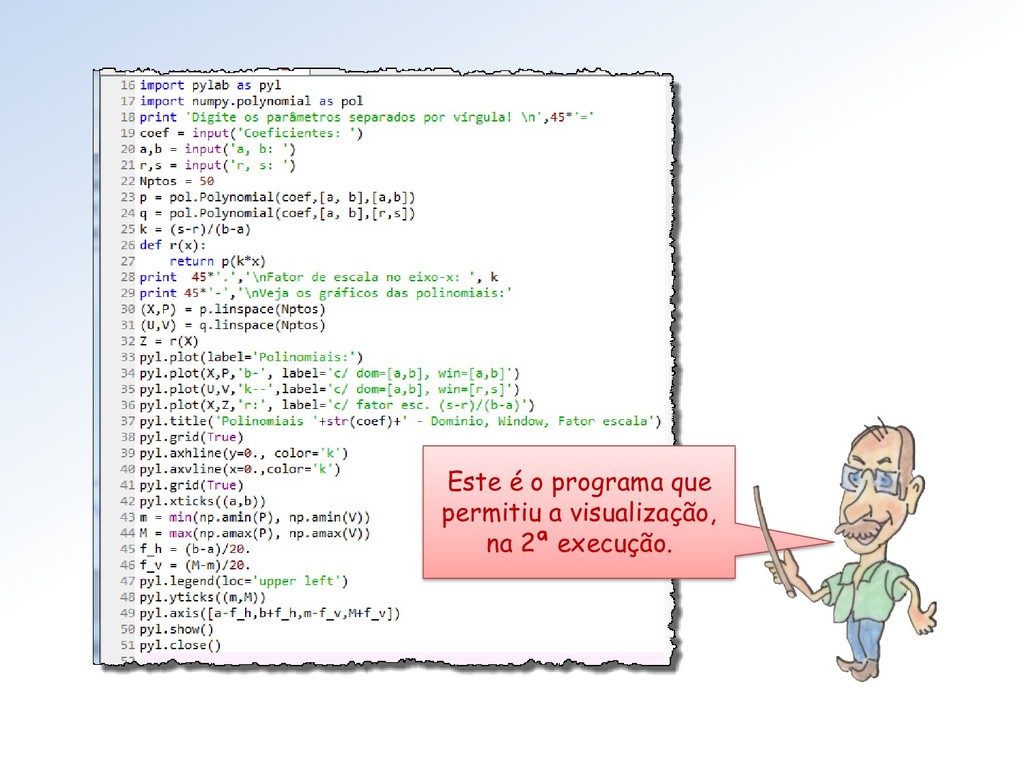
p chamando o construtor Polynomial(), da classe polynomial passando os parâmetros coef, domain e window. Os passos envolvidos na criação de uma função polinomial p: 1 2
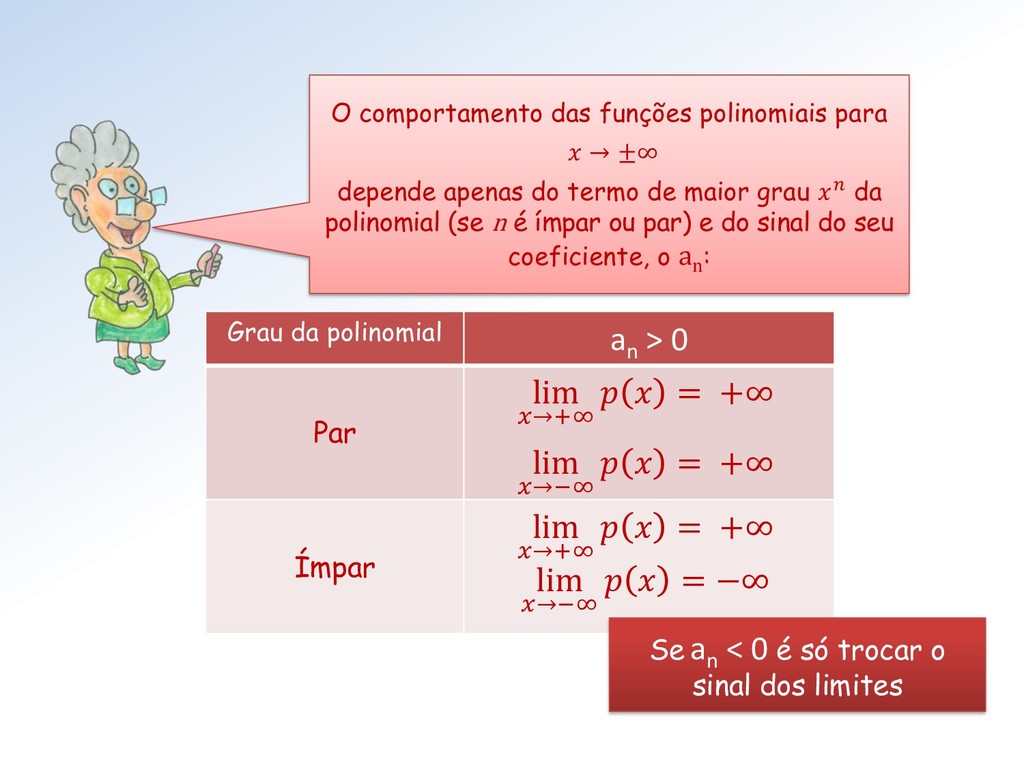
+∞ lim →−∞ = +∞ Ímpar lim →+∞ = +∞ lim →−∞ = −∞ O comportamento das funções polinomiais para → ±∞ depende apenas do termo de maior grau da polinomial (se n é ímpar ou par) e do sinal do seu coeficiente, o a n : Se an < 0 é só trocar o sinal dos limites
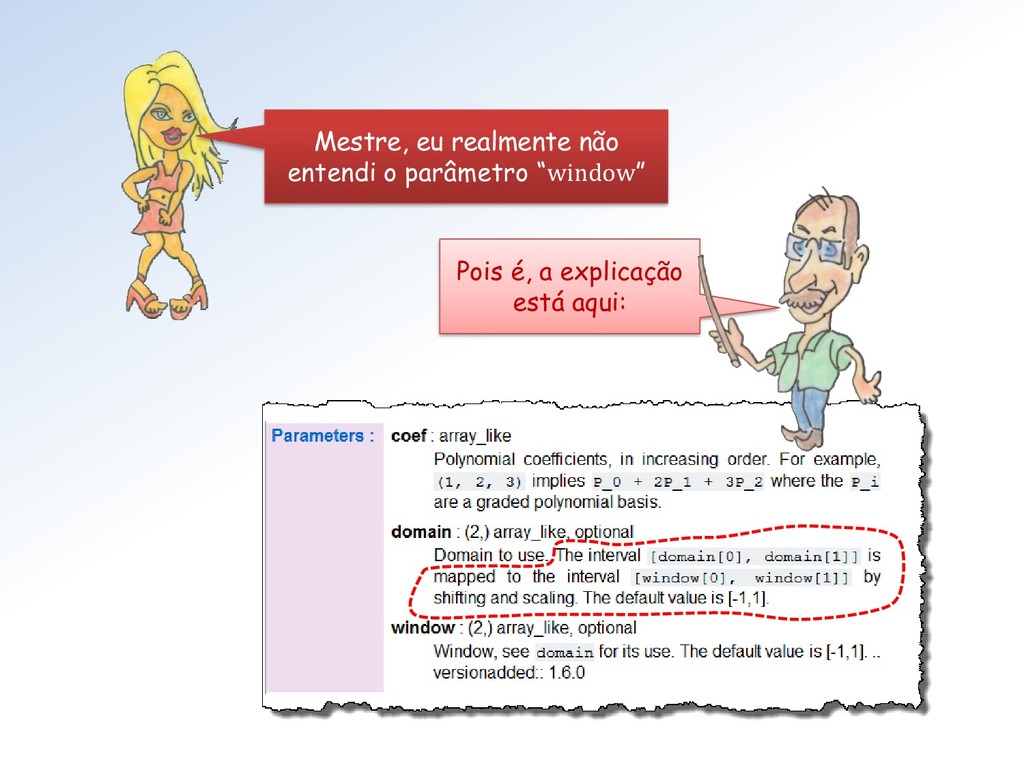
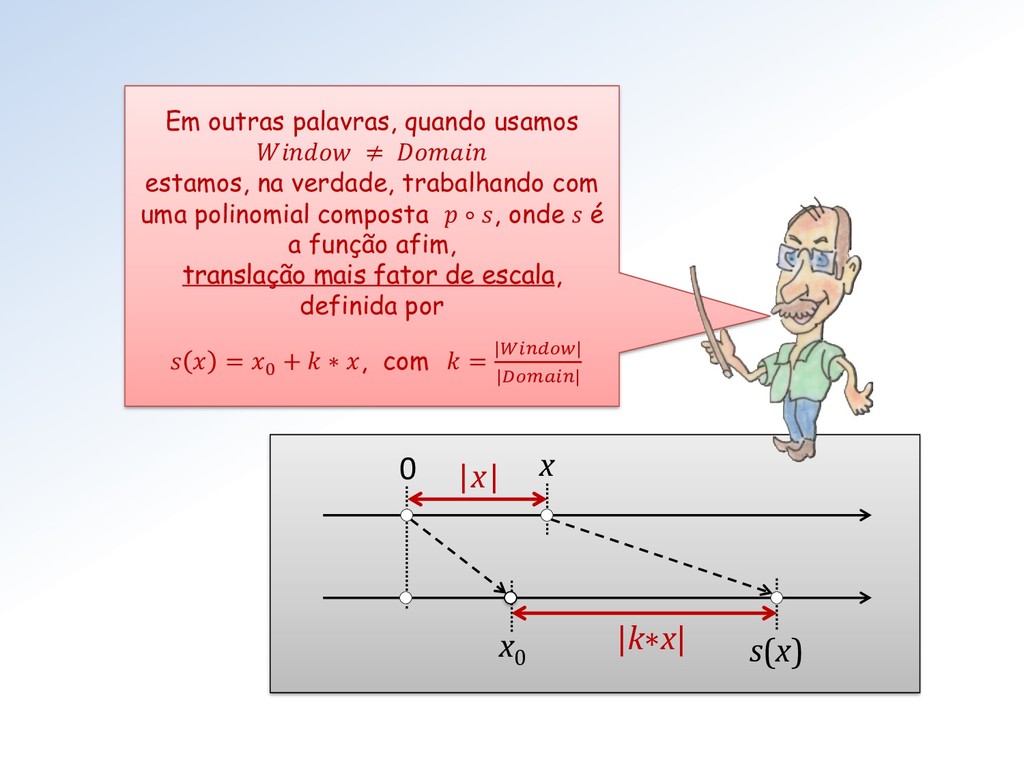
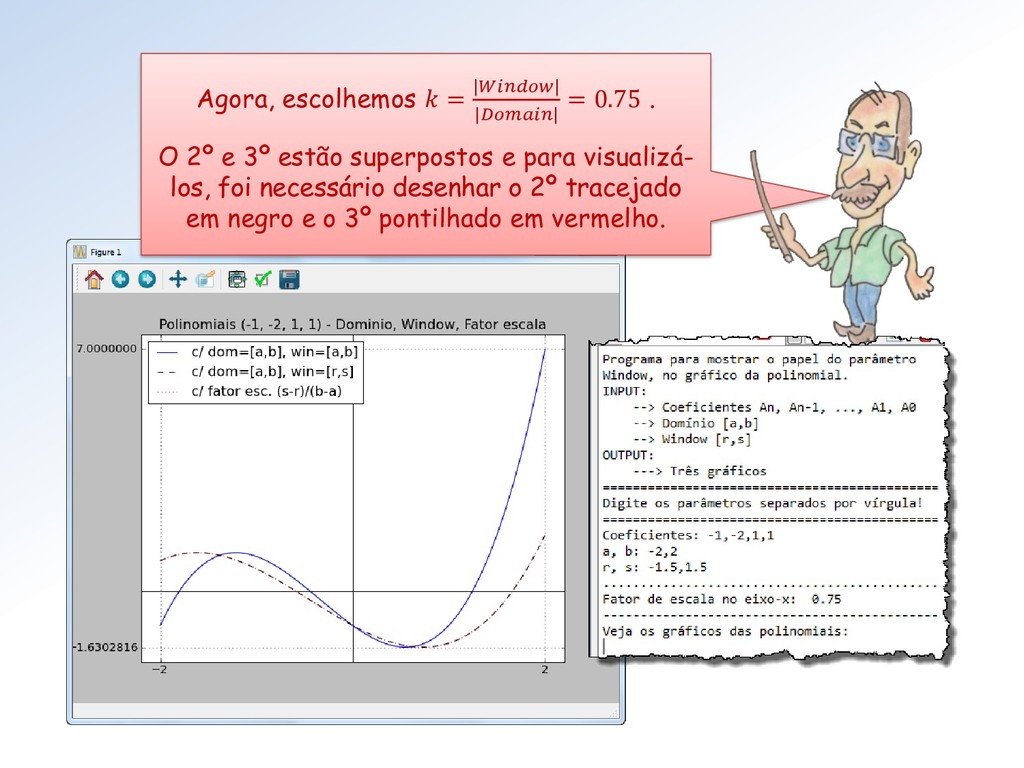
quando usamos ≠ estamos, na verdade, trabalhando com uma polinomial composta ∘ , onde s é a função afim, translação mais fator de escala, definida por = 0 + ∗ , com = || ||
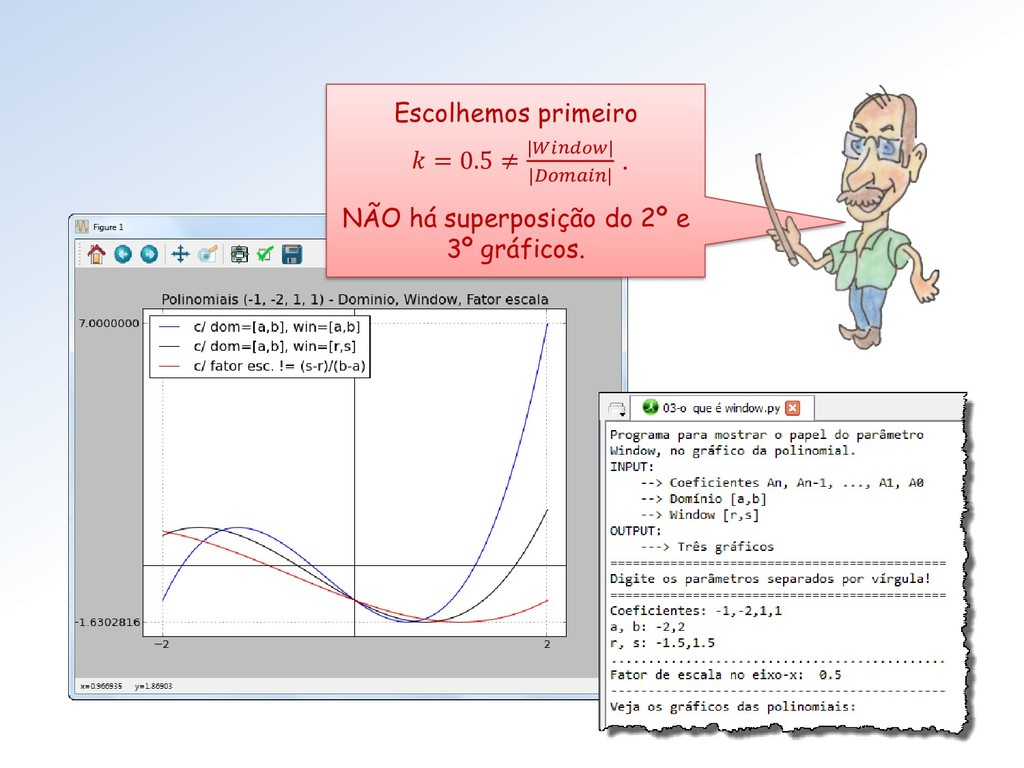
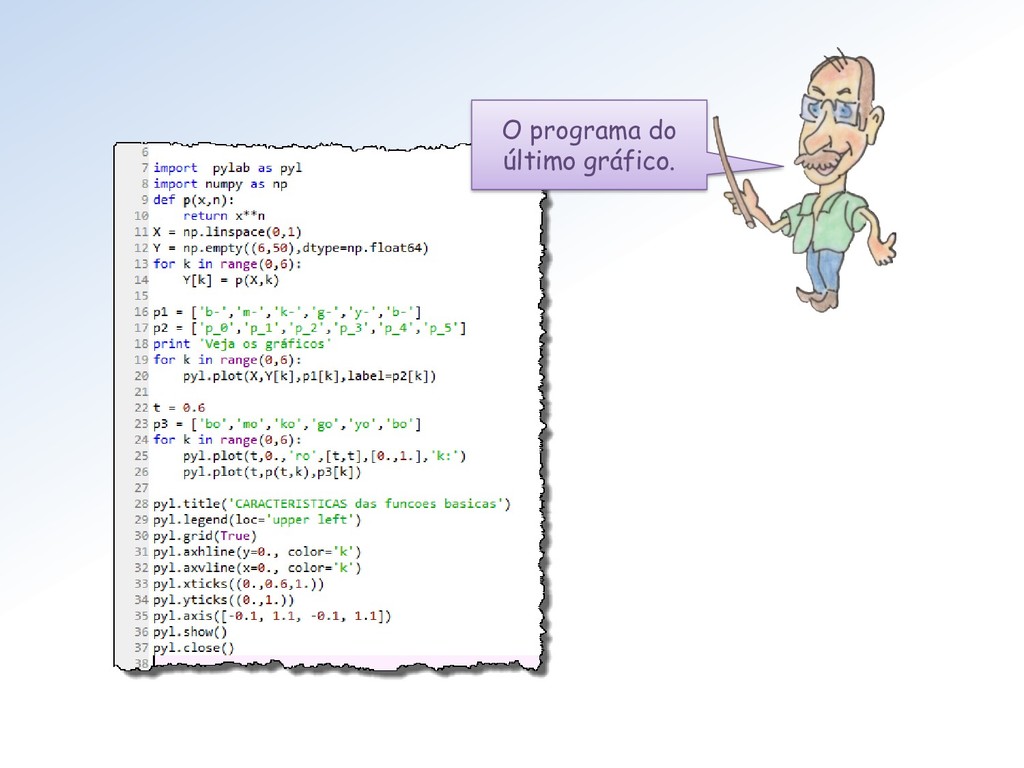
2. Para outros valores de k, isto não acontece. Confiram nas duas próximas transparências. Fizemos um programa que mostra 3 gráficos: 1. O de uma polinomial p com Window = Domain, 2. O da mesma polinomial p, mas com Window ≠ Domain, 3. Um 3º da mesma polinomial p, com o mesmo Domain, mas substituindo a variável x por ∗ , onde k um fator de escala para a variável x.
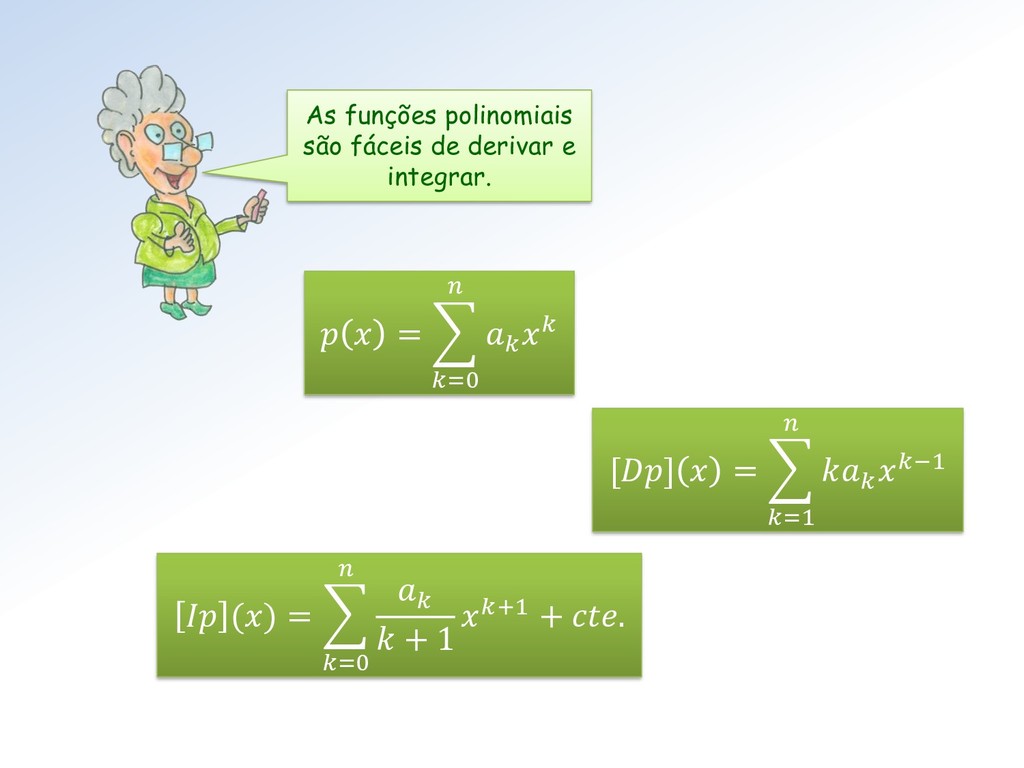
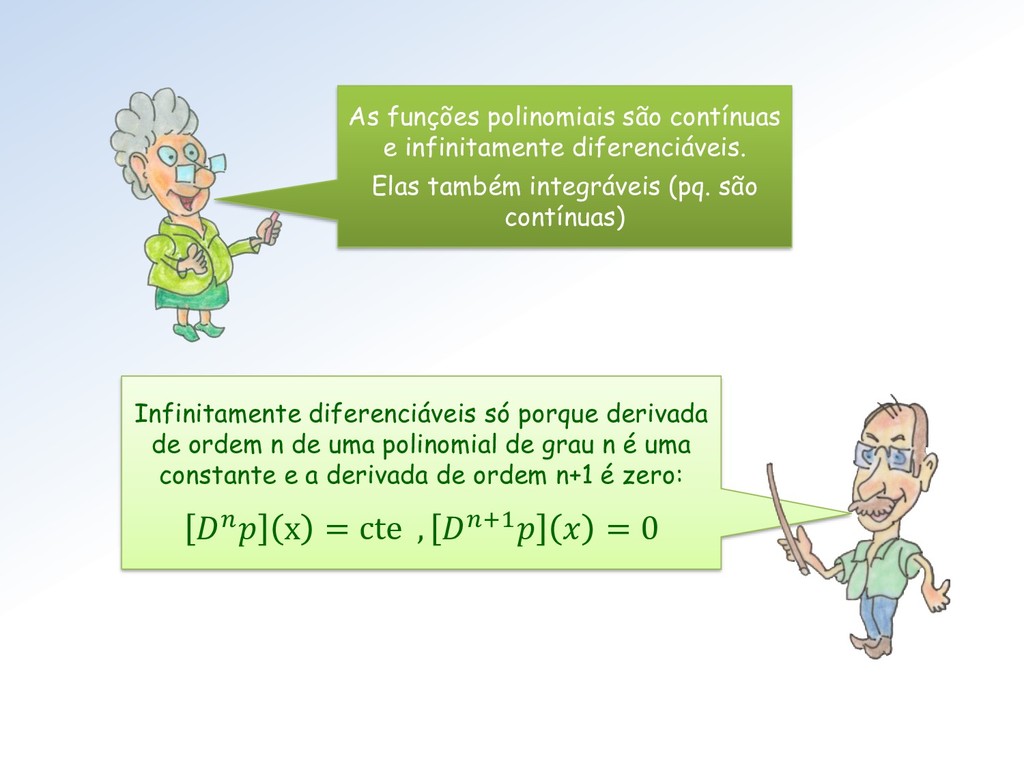
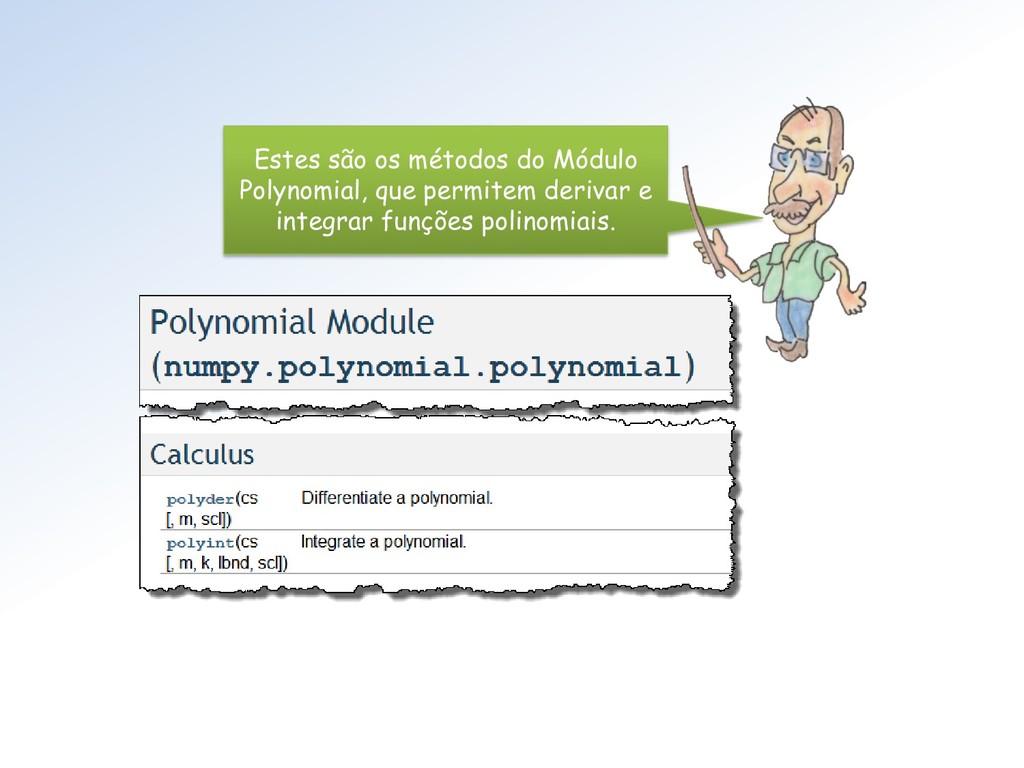
integráveis (pq. são contínuas) Infinitamente diferenciáveis só porque derivada de ordem n de uma polinomial de grau n é uma constante e a derivada de ordem n+1 é zero: x = cte , +1 = 0
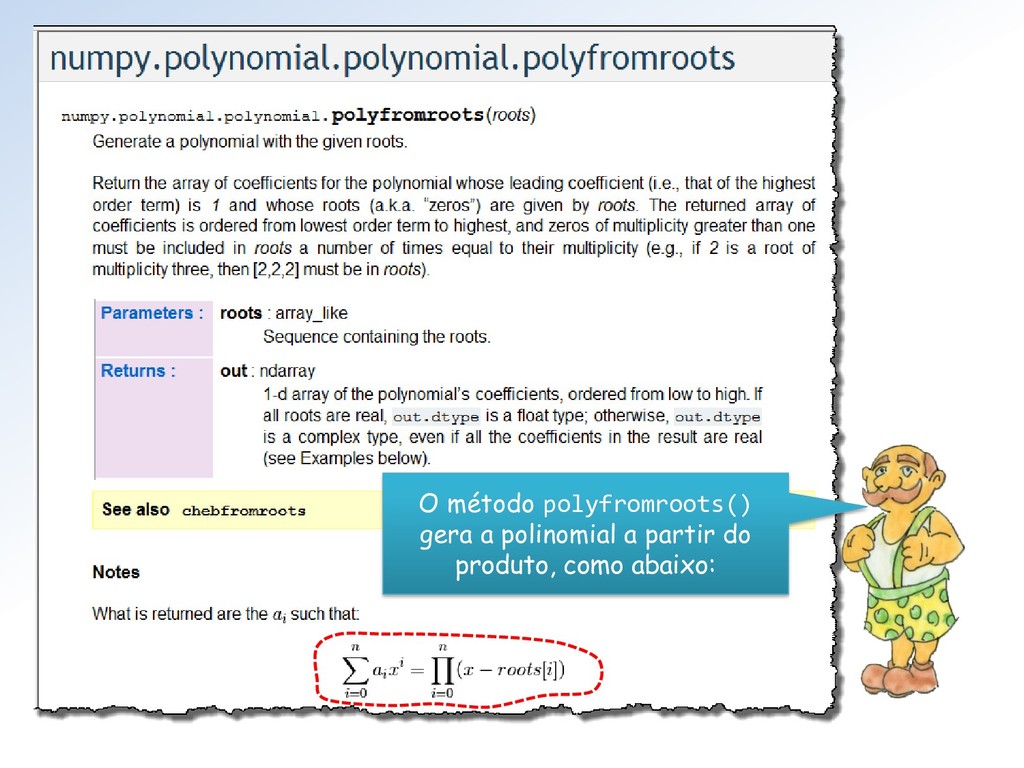
2 − 3 Obteremos, obviamente, uma polinomial de grau 4 em x, cujas raízes são 0 , 1 , 2 , 3 . Essa polinomial terá a forma padrão 4 4 + 3 3 + 2 2 + 1 + 0 , 4 = 1, cujos coeficientes são obtidos, com um bocado de algebrismo, a partir das raízes.
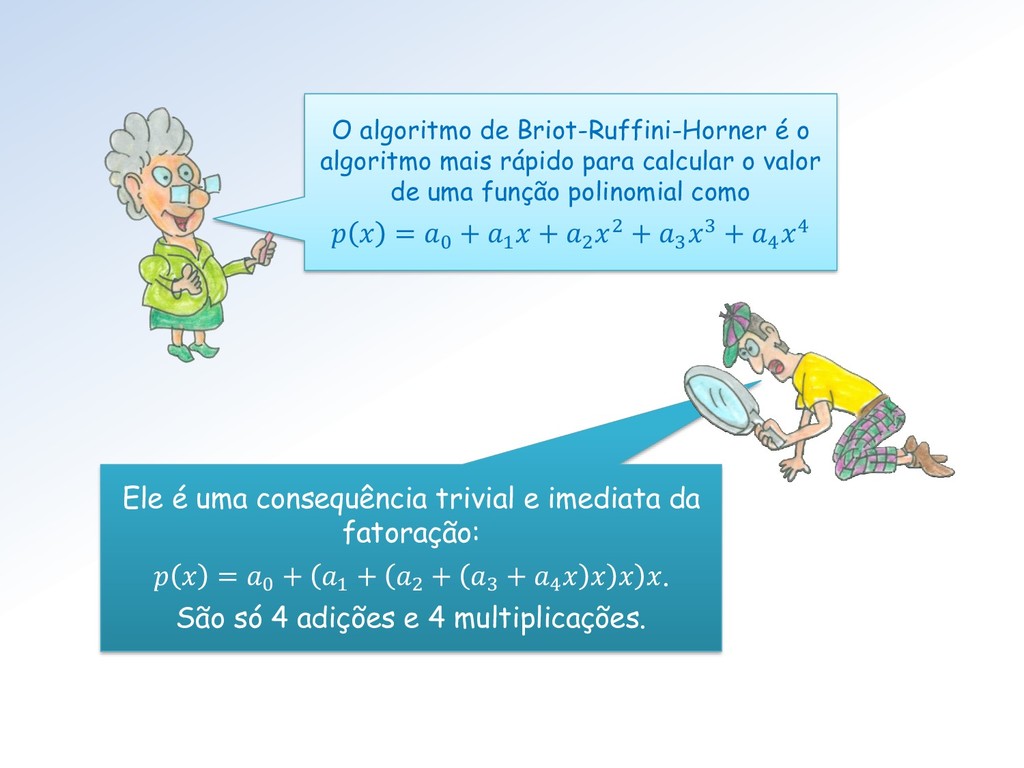
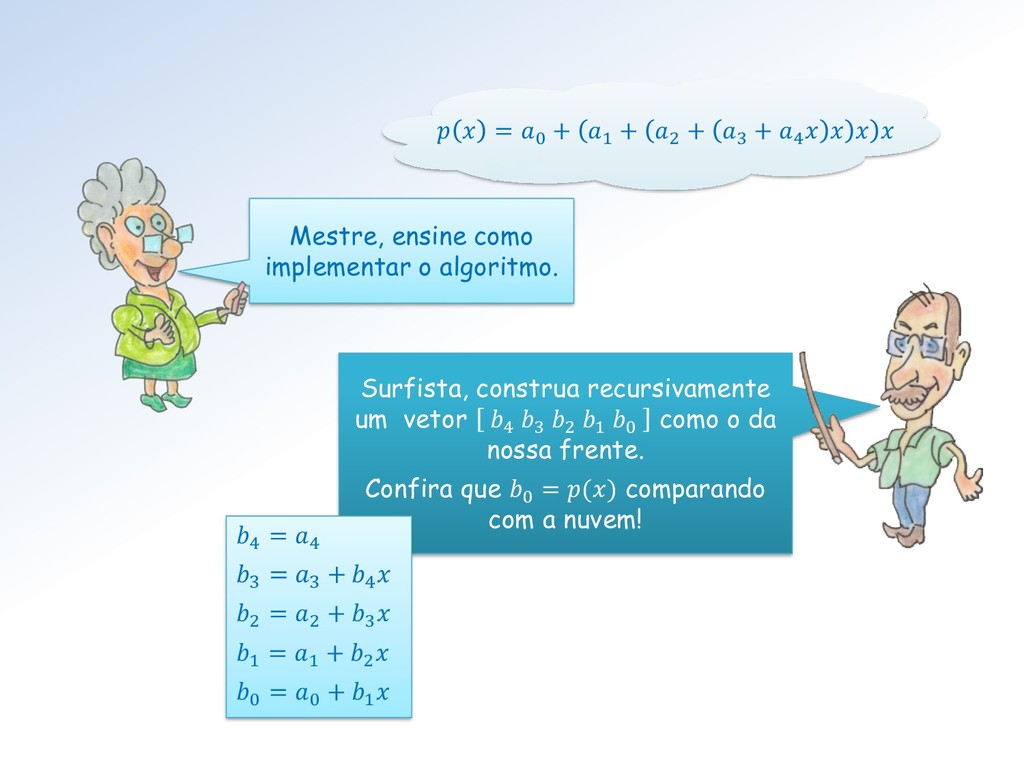
0 + 1 + 2 + 3 + 4 . São só 4 adições e 4 multiplicações. O algoritmo de Briot-Ruffini-Horner é o algoritmo mais rápido para calcular o valor de uma função polinomial como = 0 + 1 + 2 2 + 3 3 + 4 4
então a equação () = 0 Possui pelo menos uma raiz (real ou complexa). Teorema fundamental da Álgebra Carl Friedrich Gauss demonstrou o seguinte resultado em sua tese de doutorado:
sua complexa conjugada), se o grau da polinomial é ímpar com certeza ela possui uma raiz real. Segue do Teorema fundamental da Álgebra que: uma função polinomial = () de grau n possui n raízes reais ou complexas.
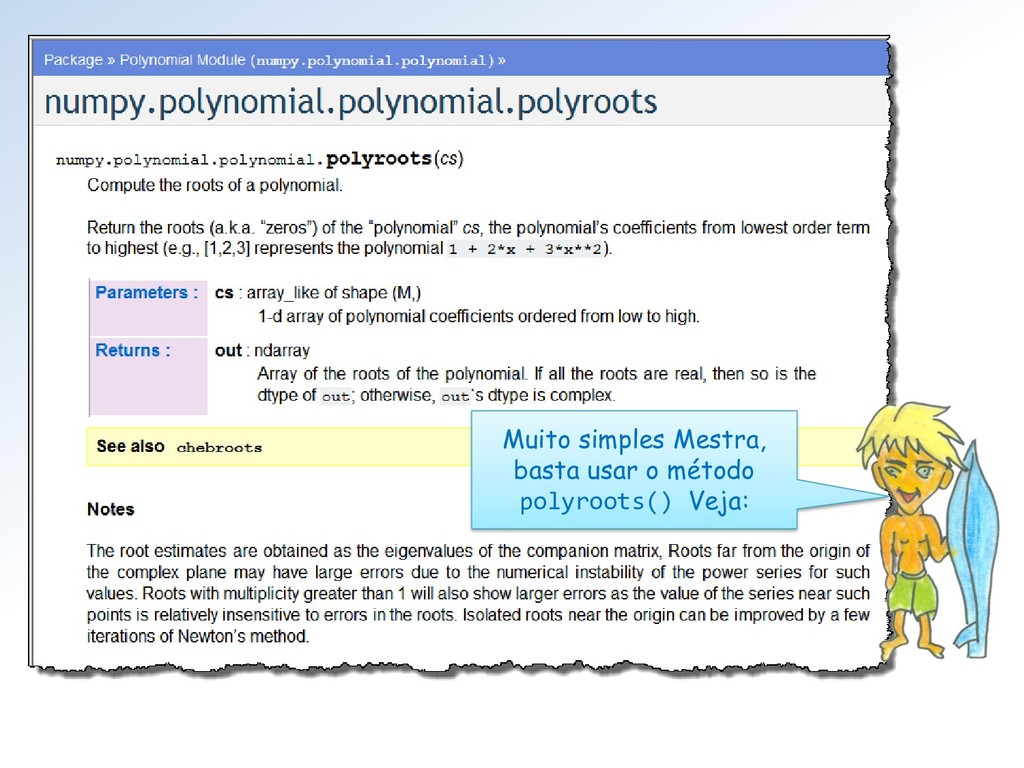
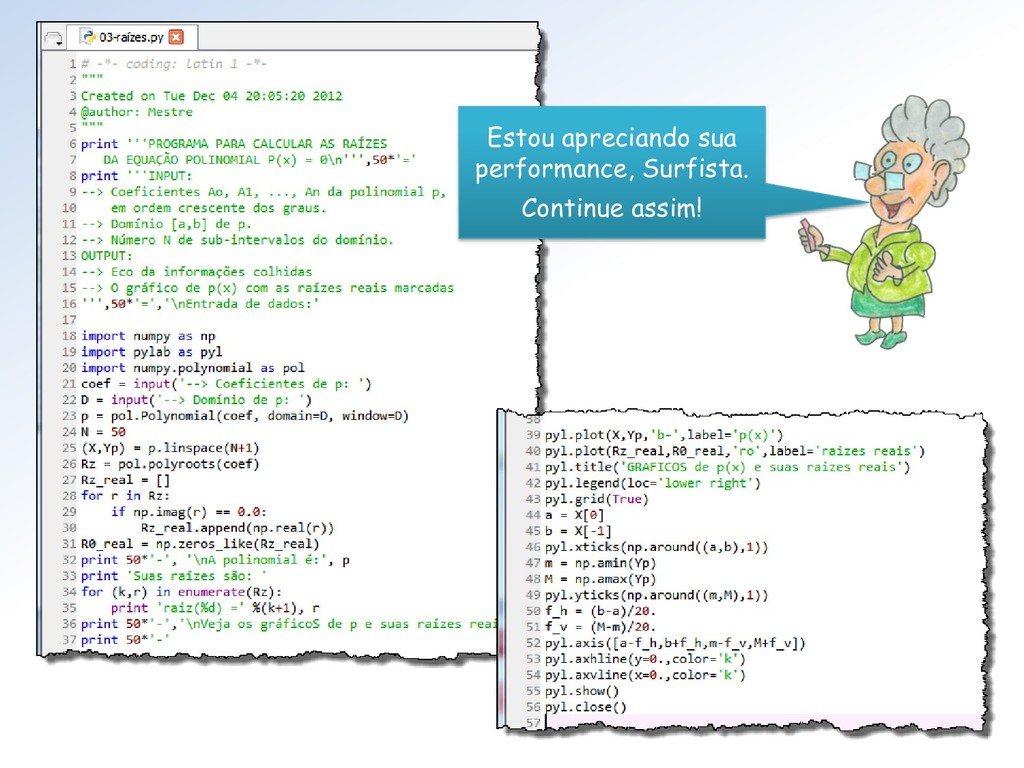
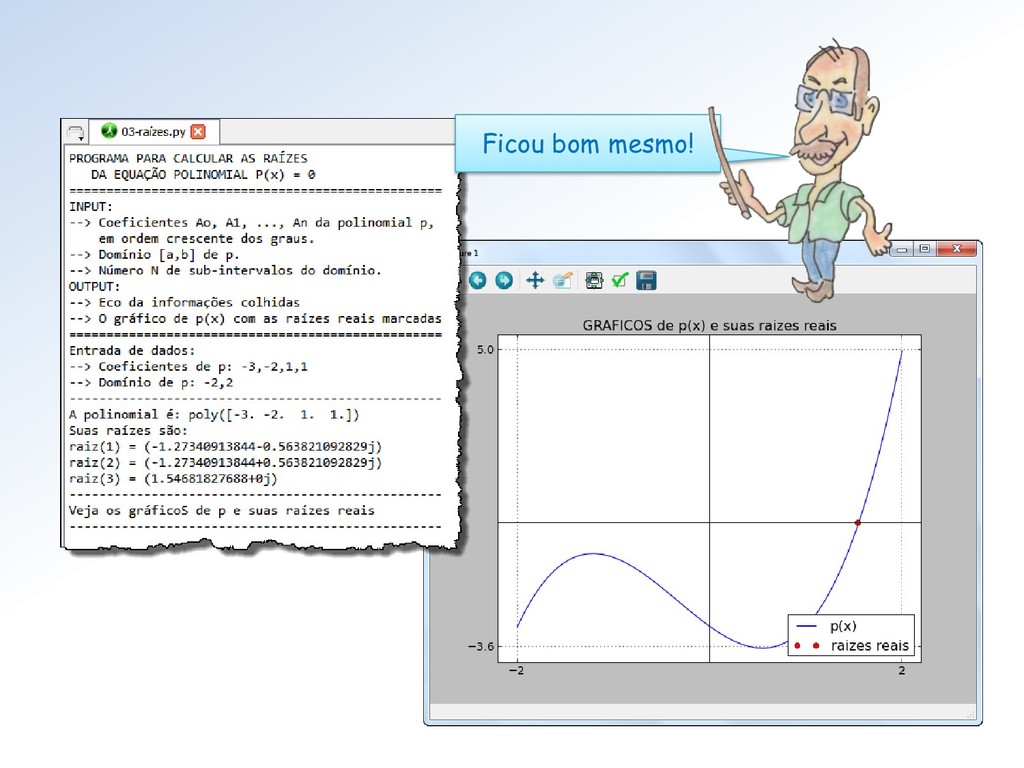
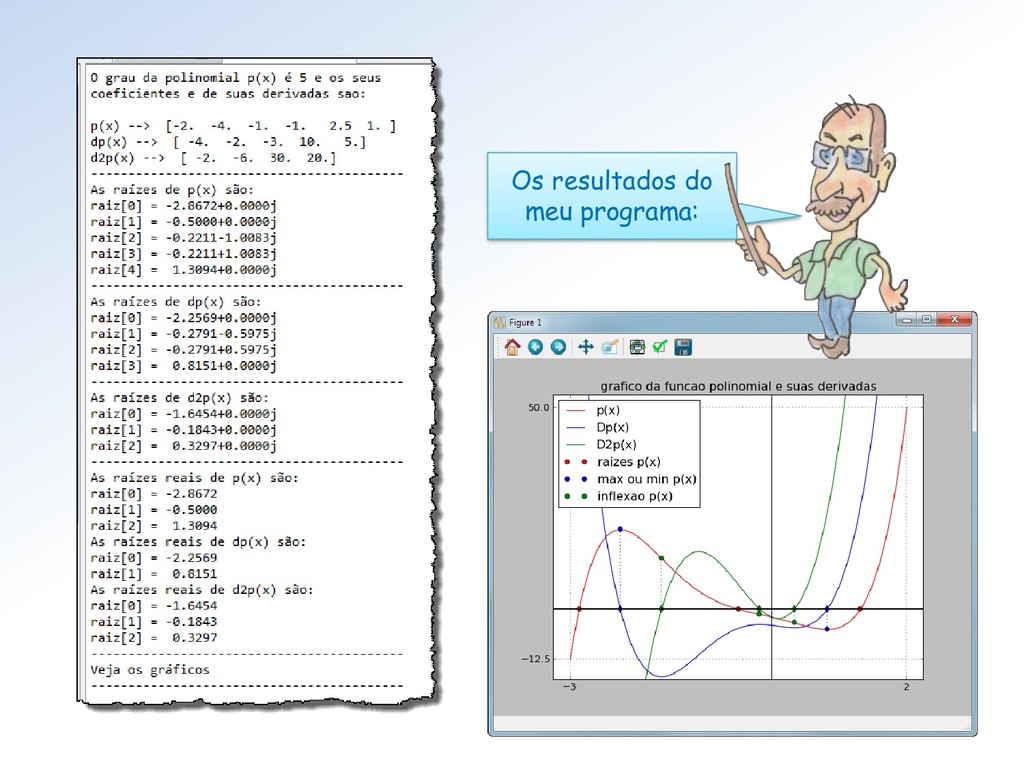
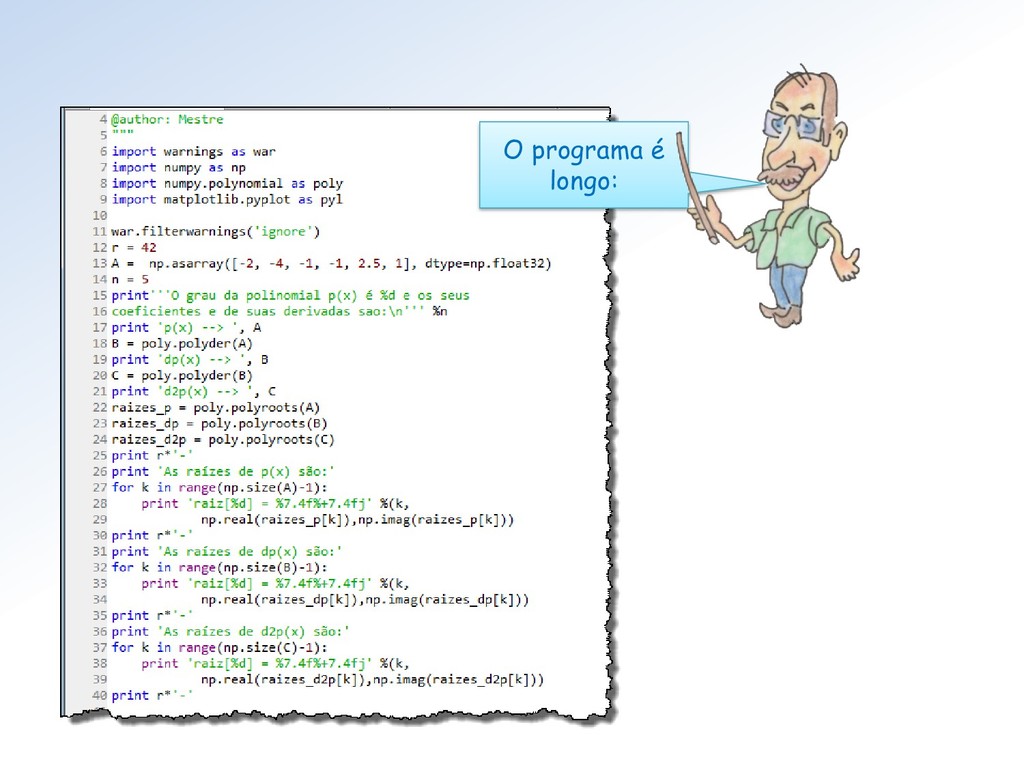
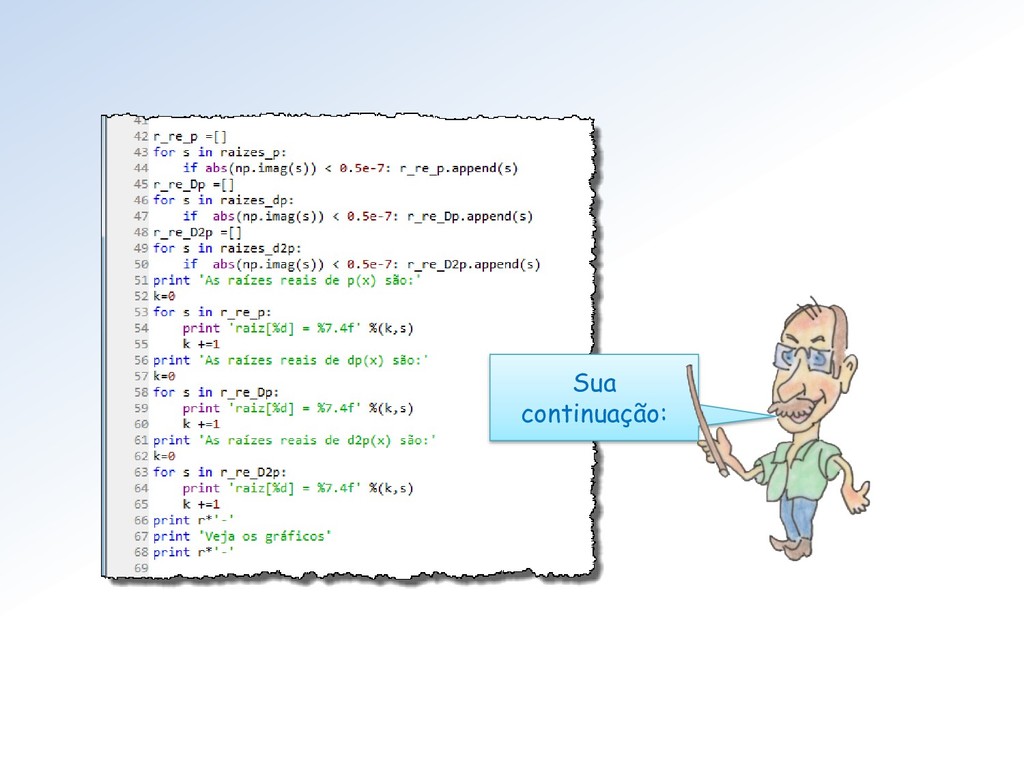
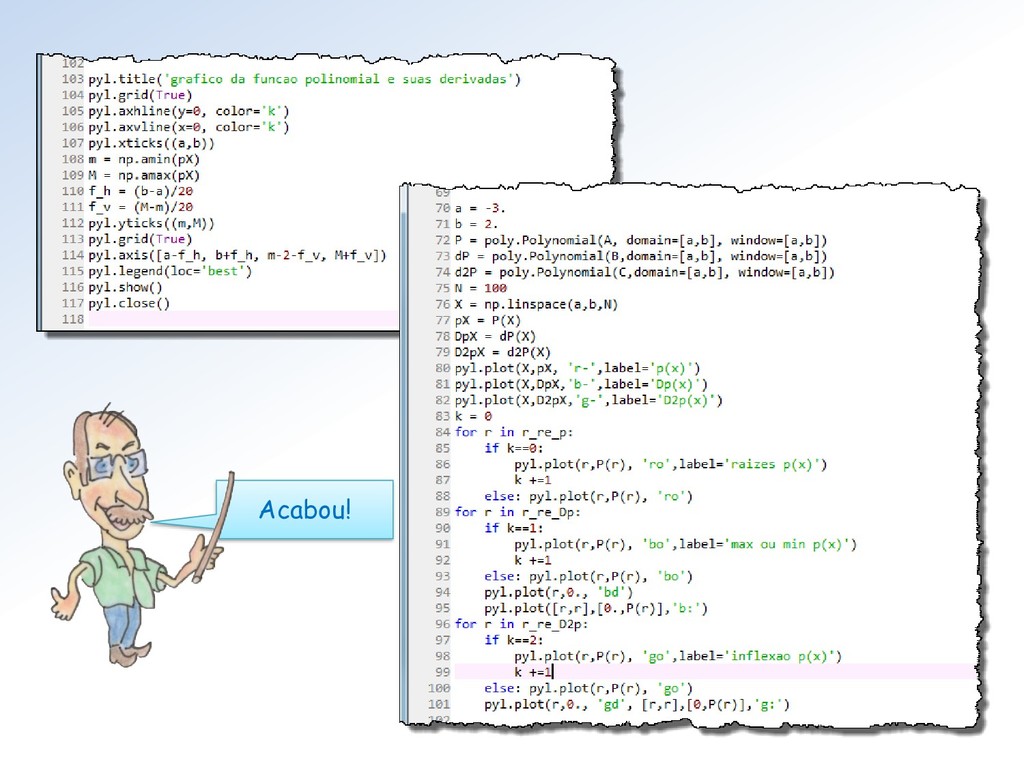
não apenas para equações polinomiais. O polyroots() é específico para polinomiais. O Mestre fez um programa para mostrar o gráfico de uma polinomial () e assinalar seus pontos de máximo, mínimo e inflexão. Mostra também os gráficos das derivadas de ordem 1 e 2 da ().
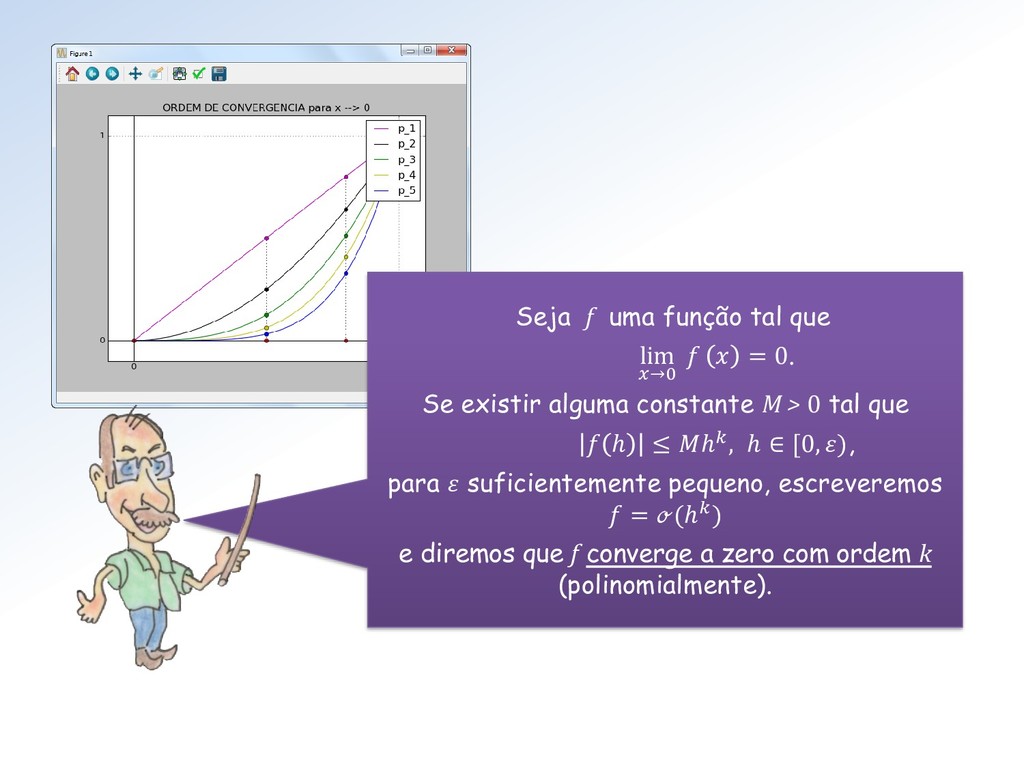
Se existir alguma constante M > 0 tal que ℎ ≤ ℎ, ℎ ∈ [0, ), para suficientemente pequeno, escreveremos = ℴ(ℎ) e diremos que f converge a zero com ordem k (polinomialmente).
das polinomiais. Elas surgem de forma natural na resolução, por separação de variáveis, de problemas de valor de contorno onde o domínio apresenta algum tipo de simetria. Infelizmente, em nosso curso, não teremos oportunidade de trabalhar com esses problemas.
V é uma norma quando satisfaz: I. ≥ 0 II. = 0 ⟺ = 0. III. = - a escala IV. + ≤ + - a desigualdade triangular para , ∈ e α ∈ ℝ. Mestre, relembre ao Surfista a definição abstrata de norma de um vetor!
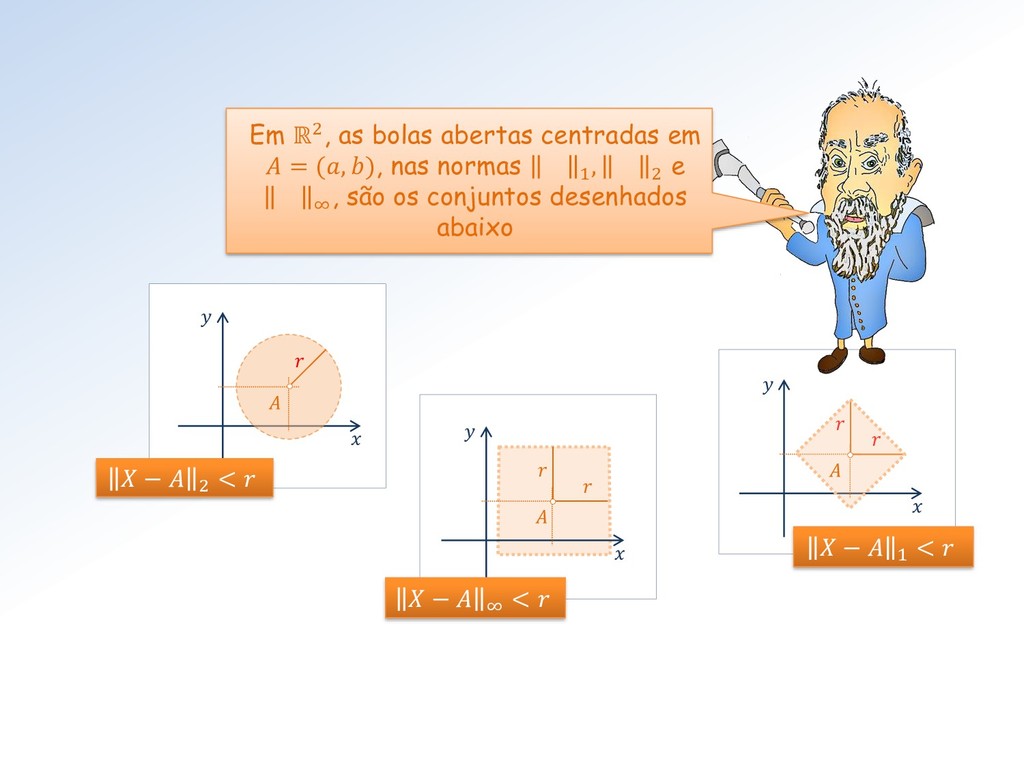
vetores flechinha e de matrizes. Inclusive aprendemos a calculá-las usando a NumPy. Já vimos que nos espaços ℝ, ℂ e para as matrizes ℳ× existem diversas normas: 1 , 2 , , ∞ .
Um espaço normado é completo quando toda sequência de Cauchy é convergente (para um vetor do próprio espaço). É o caso dos ℝ , ℂ e ℳ× com qualquer uma das normas.
vetorial pois: • a soma de funções limitadas é uma função limitada, • o produto de uma função limitada por qualquer número real resulta numa função limitada.
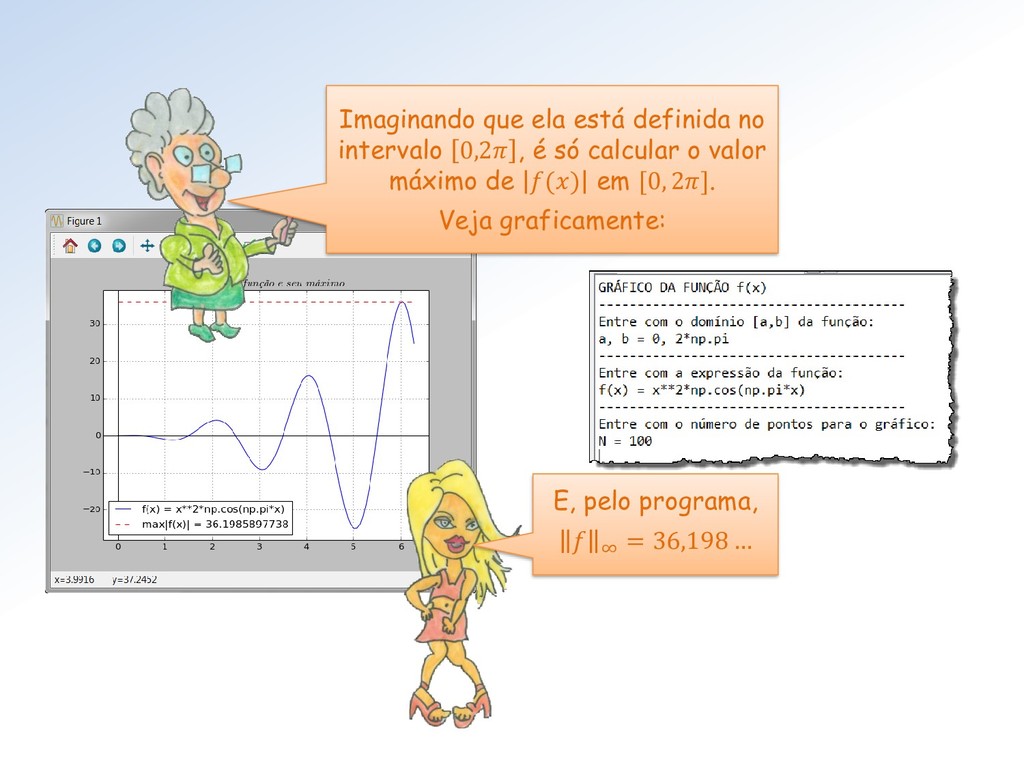
norma no conjunto ℬ(, ℝ) das funções limitadas num conjunto . Assim ℬ(, ℝ) é um espaço vetorial normado. As propriedades I, II , III e IV da definição abstrata de norma são facílimas de provar. Faça isto como exercício, Surfista!
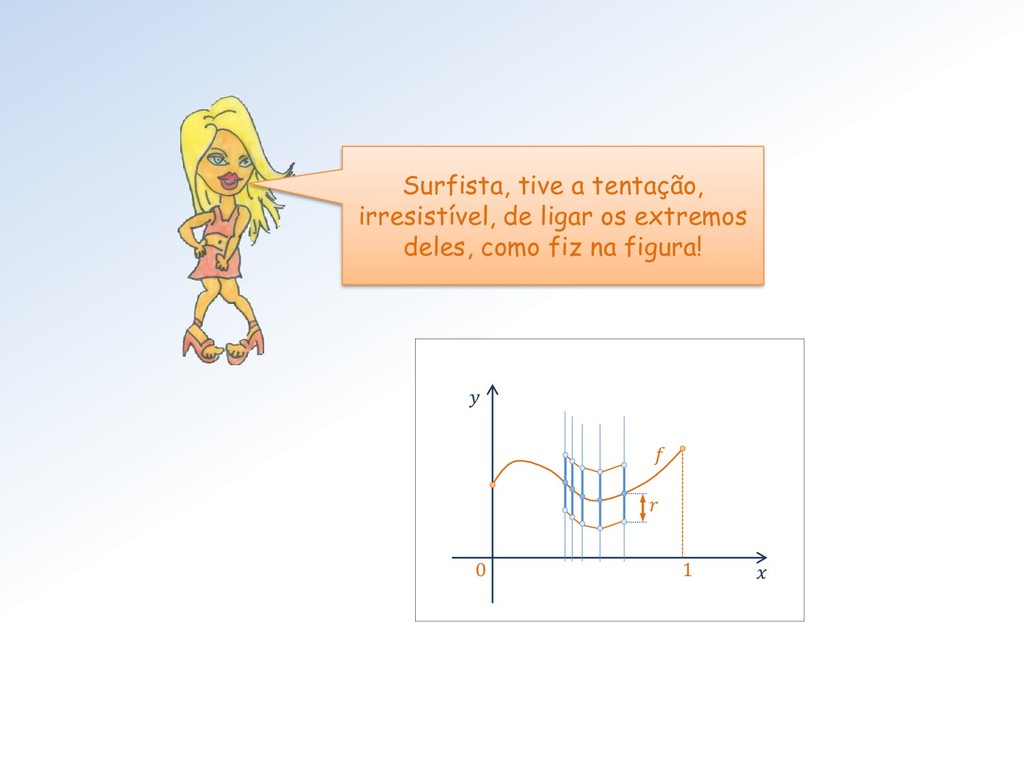
o ponto (, ) no plano cartesiano × . Então qualquer valor = () assumido pela em obrigatoriamente terá que satisfazer − () < . Que é um intervalo de raio centrado nesse ponto sobre a reta vertical por . Confira no meu desenho
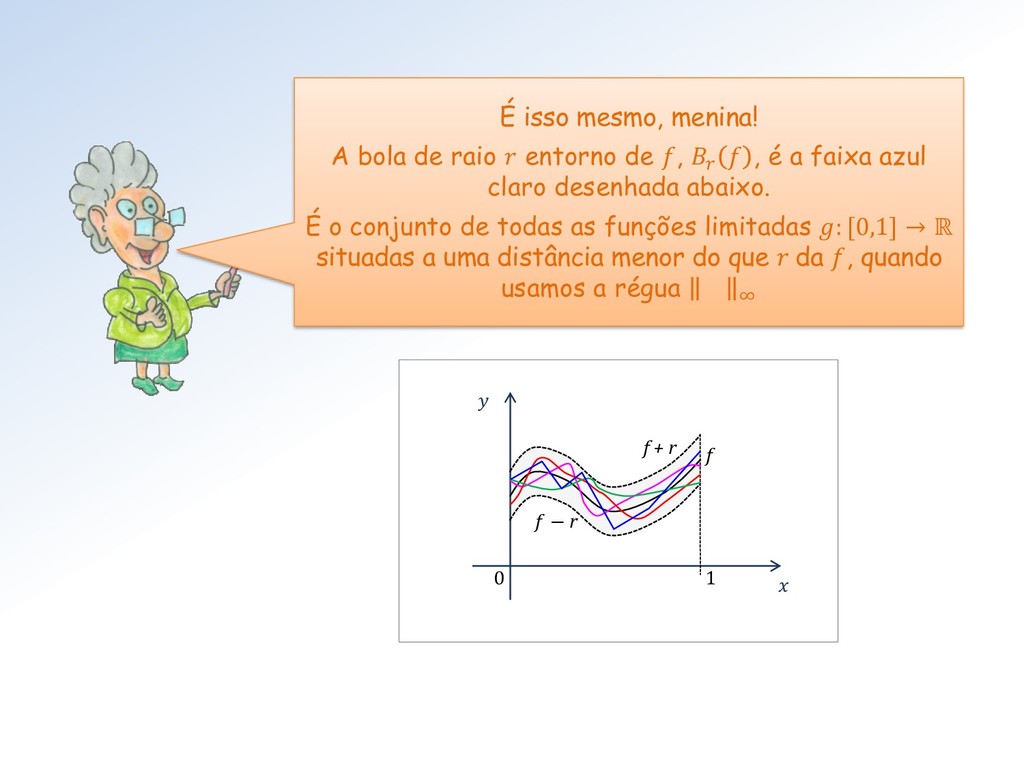
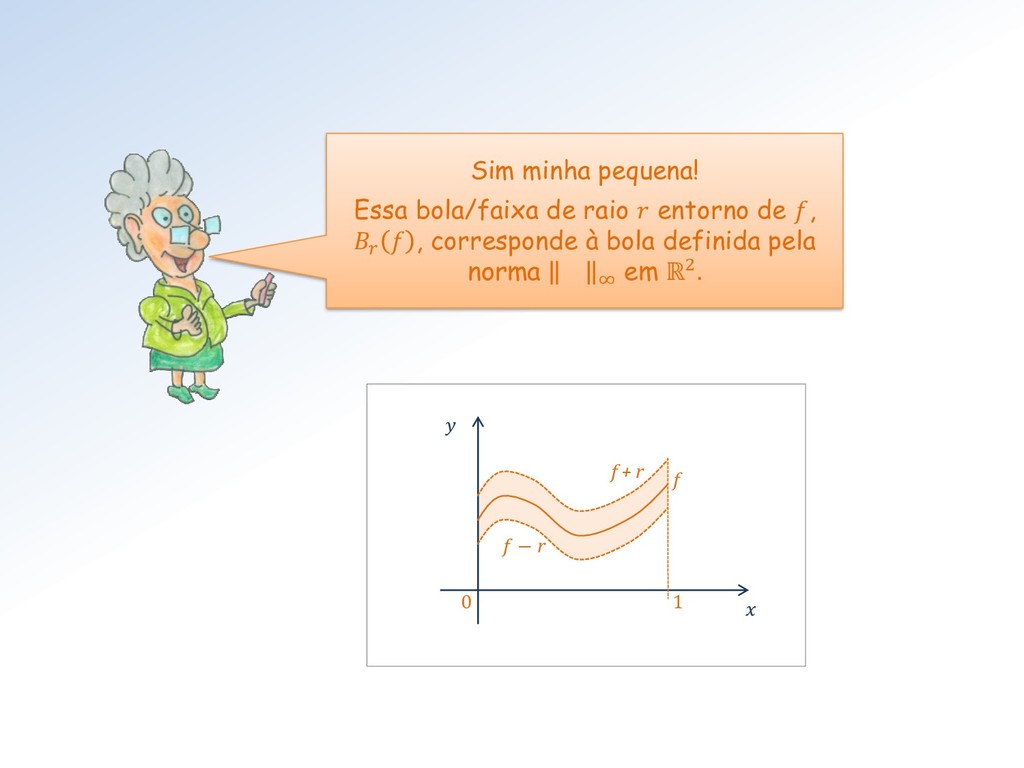
, , é a faixa azul claro desenhada abaixo. É o conjunto de todas as funções limitadas : [0,1] → ℝ situadas a uma distância menor do que da , quando usamos a régua ∞ 1 0 + r − r
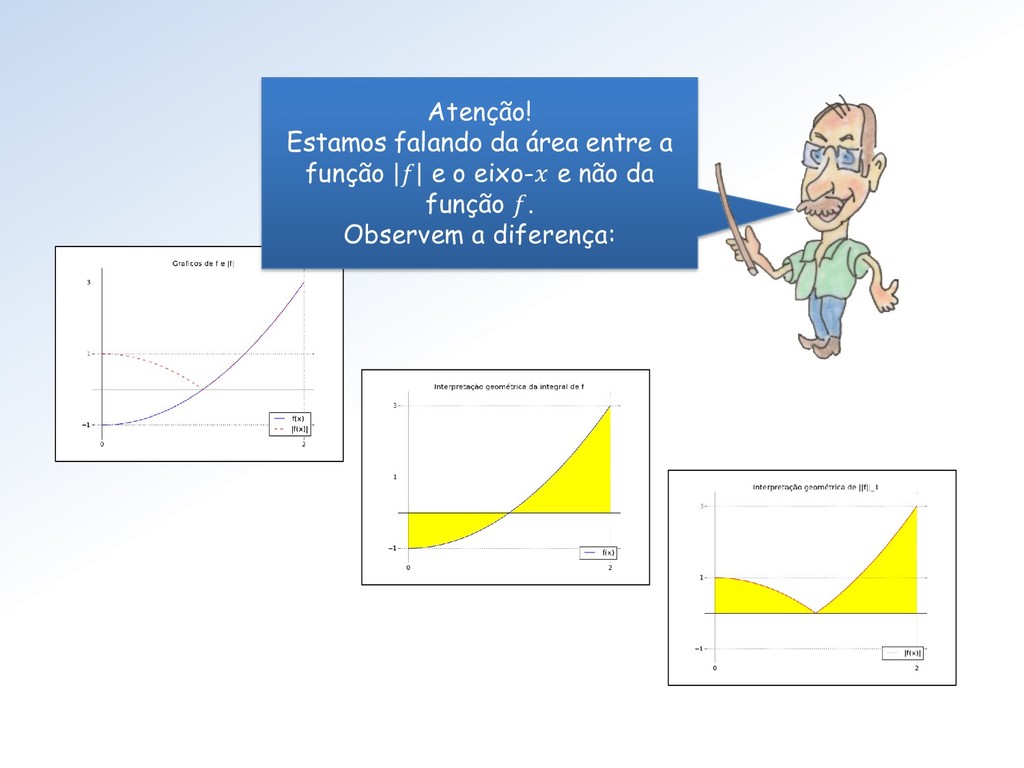
centro em uma função ∶ [, ] → ℝ e raio é o conjunto de todas as funções integráveis ∶ [, ] → ℝ tais que න − () < É uma imposição sobre o tamanho da área entre a função ℎ = − e o eixo-. Se fosse a função nula estaríamos falando do conjunto de todas as funções integráveis tais que න () < .
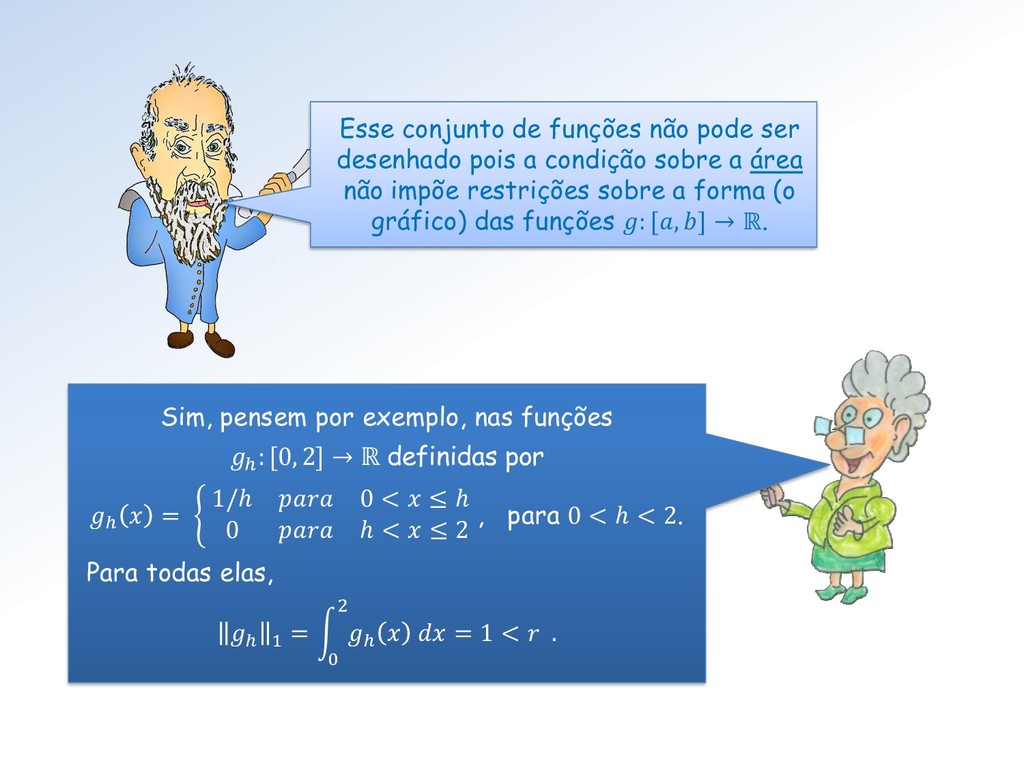
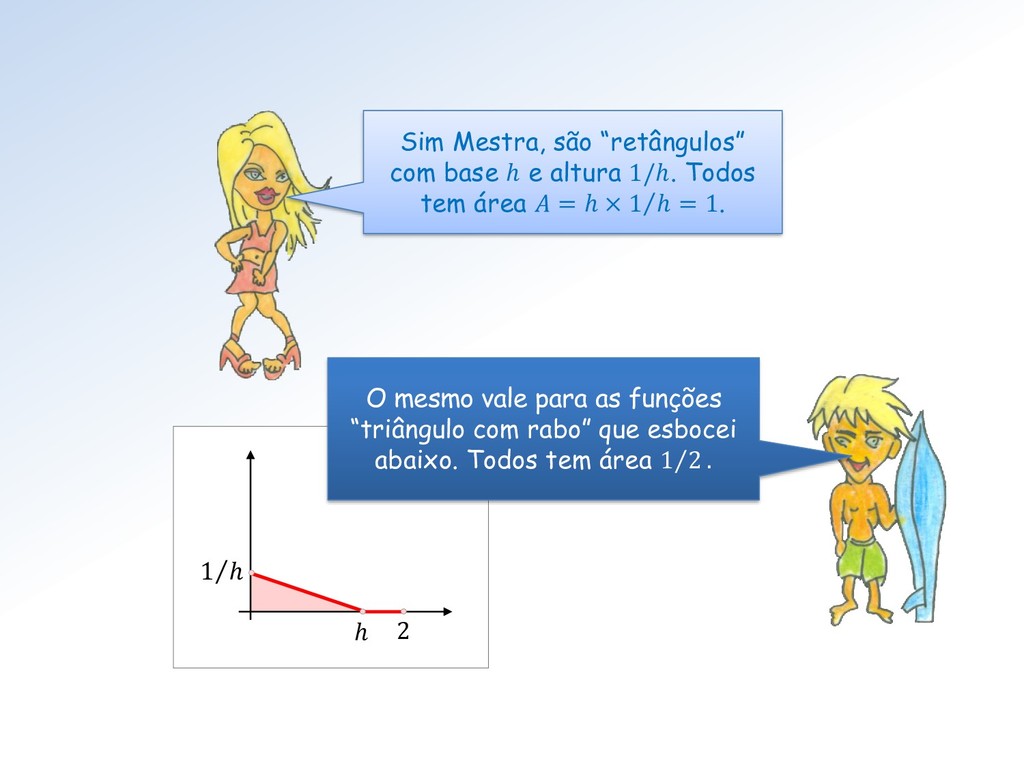
condição sobre a área não impõe restrições sobre a forma (o gráfico) das funções : [, ] → ℝ. Sim, pensem por exemplo, nas funções ℎ : [0, 2] → ℝ definidas por ℎ = ቊ 1/ℎ 0 < ≤ ℎ 0 ℎ < ≤ 2 , para 0 < ℎ < 2. Para todas elas, ℎ 1 = න 0 2 ℎ = 1 < .
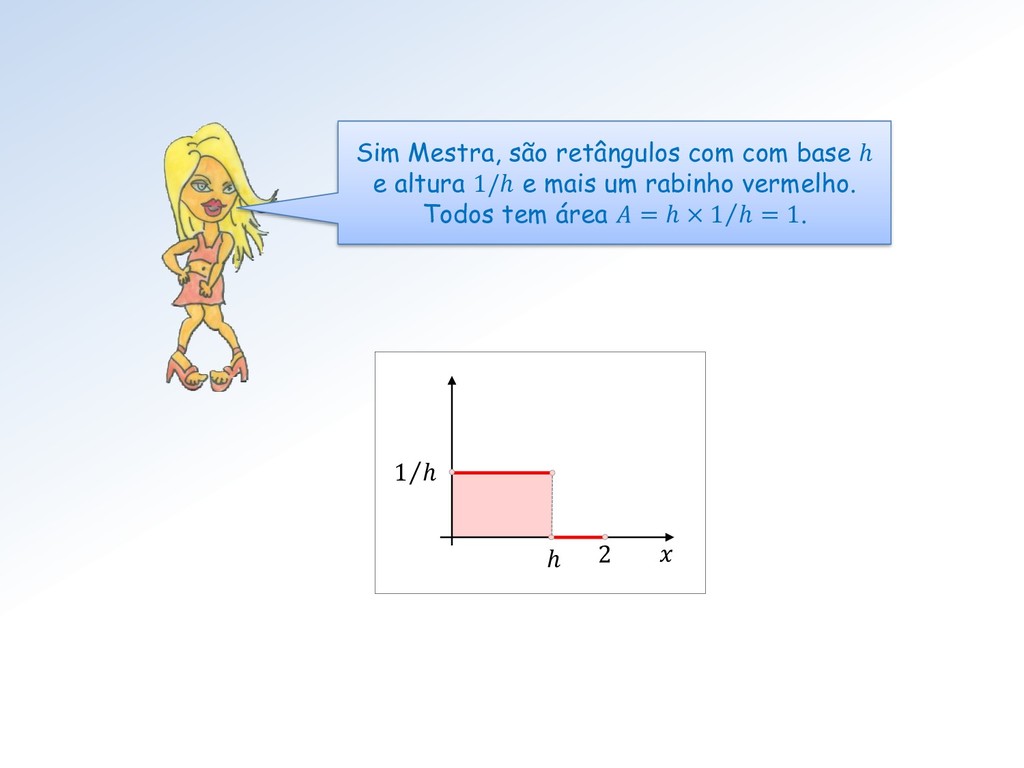
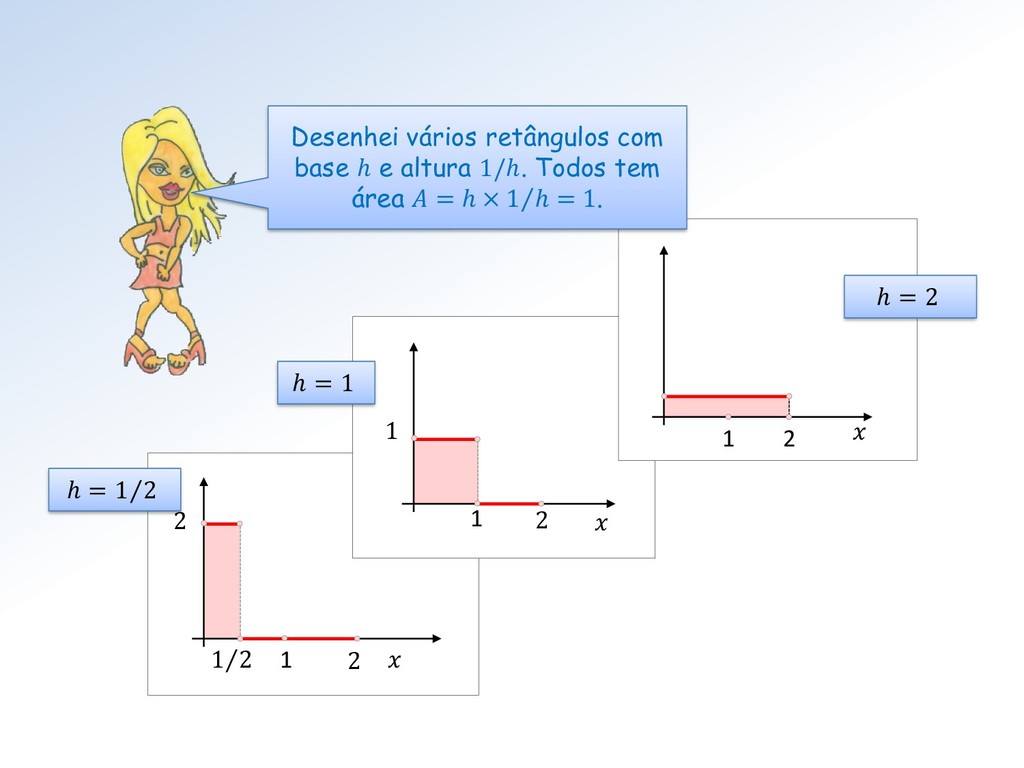
funções “triângulo com rabo” que esbocei abaixo. Todos tem área Τ 1 2 . Sim Mestra, são “retângulos” com base ℎ e altura 1/ℎ. Todos tem área = ℎ × Τ 1 ℎ = 1.
com o gráfico como abaixo também estaria nessa bola de raio 1, desde que | | ≤ 1. Todas essas funções elas estariam numa bola de raio = 1 centrada na função nula.
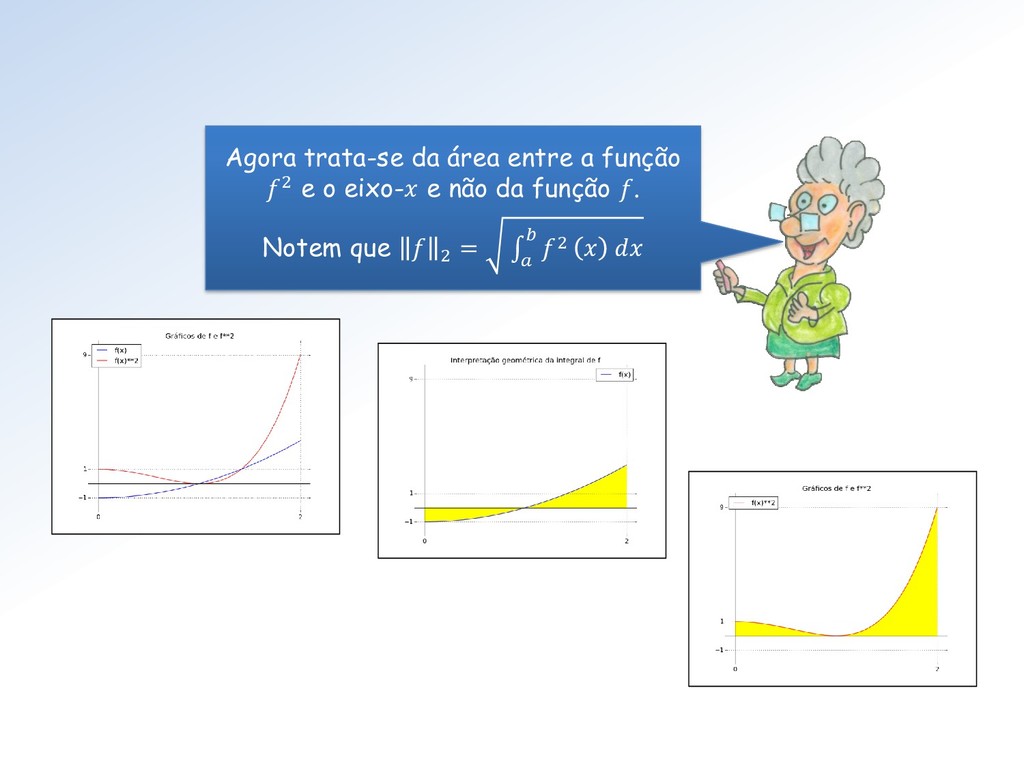
uma função ∶ [, ] → ℝ não podem ser desenhadas pois − 2 = න − () 2 Uma vez que, novamente, − 2 < é uma imposição sobre a área da função ℎ = − 2 e o eixo-.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Algumas funções do conjunto ℱ(, ℝ), quando = [−1,1]. São](https://files.speakerdeck.com/presentations/f107e13b00134aa79fa14fd9234dffa2/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Observem o caráter dual: para cada ponto ∈ [−1,1], a](https://files.speakerdeck.com/presentations/f107e13b00134aa79fa14fd9234dffa2/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![As 4 polinomiais (vetores) da base canônica de 3[−1,1].](https://files.speakerdeck.com/presentations/f107e13b00134aa79fa14fd9234dffa2/slide_22.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![() Loirinha, fixe um valor de ∈ [0,1] e marque](https://files.speakerdeck.com/presentations/f107e13b00134aa79fa14fd9234dffa2/slide_110.jpg){kind=link}
![Escolhi alguns valores de ∈ [0,1] e desenhei os intervalos](https://files.speakerdeck.com/presentations/f107e13b00134aa79fa14fd9234dffa2/slide_111.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Sim. Além dessas, qualquer função : [, ] → ℝ](https://files.speakerdeck.com/presentations/f107e13b00134aa79fa14fd9234dffa2/slide_127.jpg){kind=link}
{kind=link}
{kind=link}