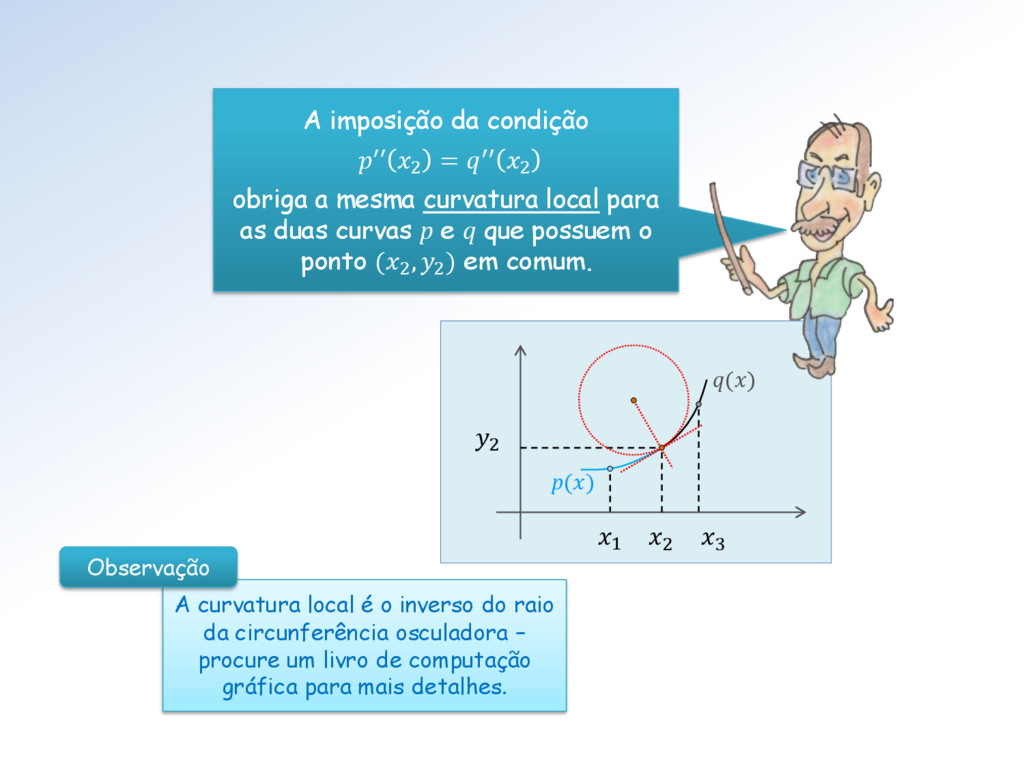
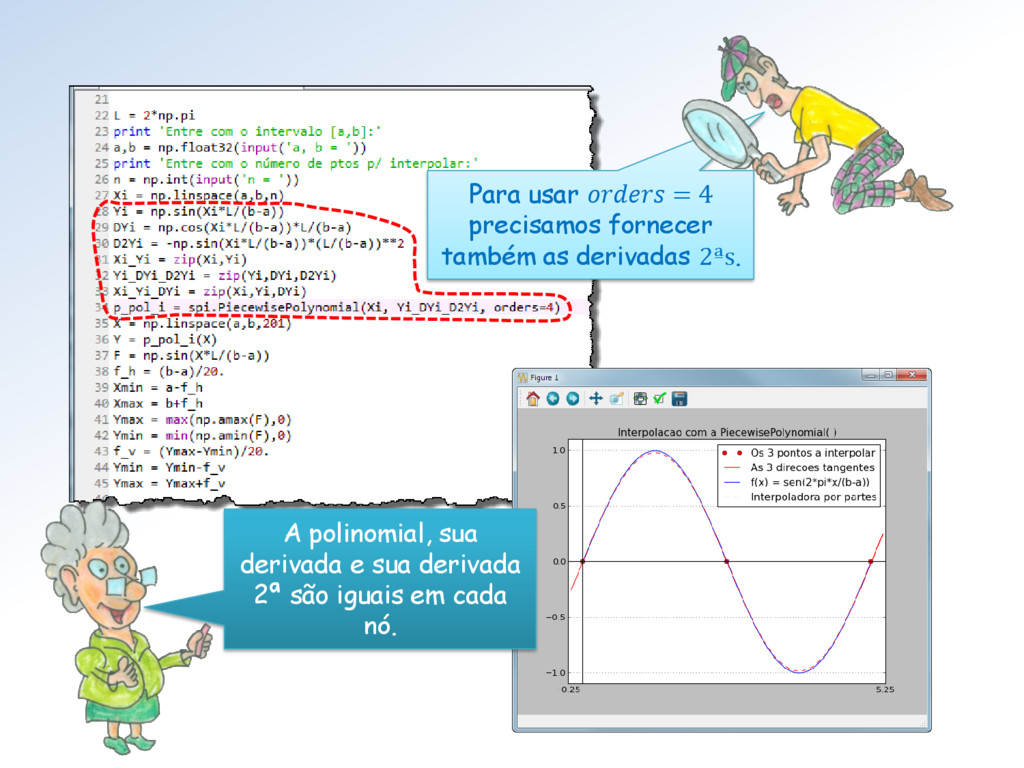
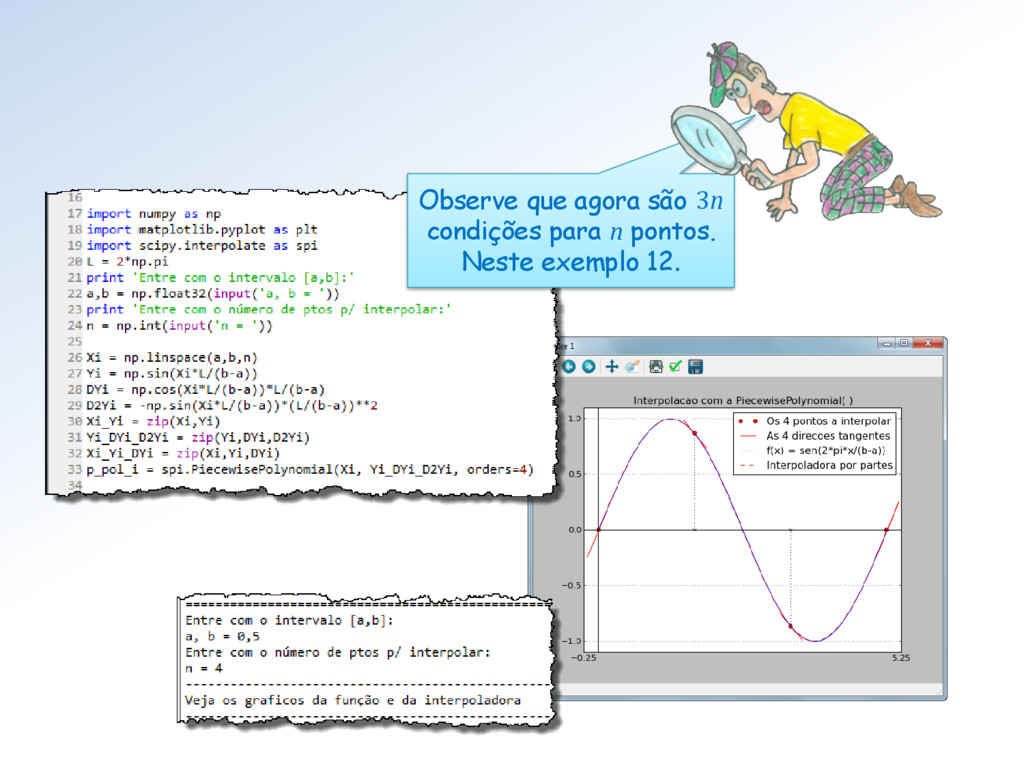
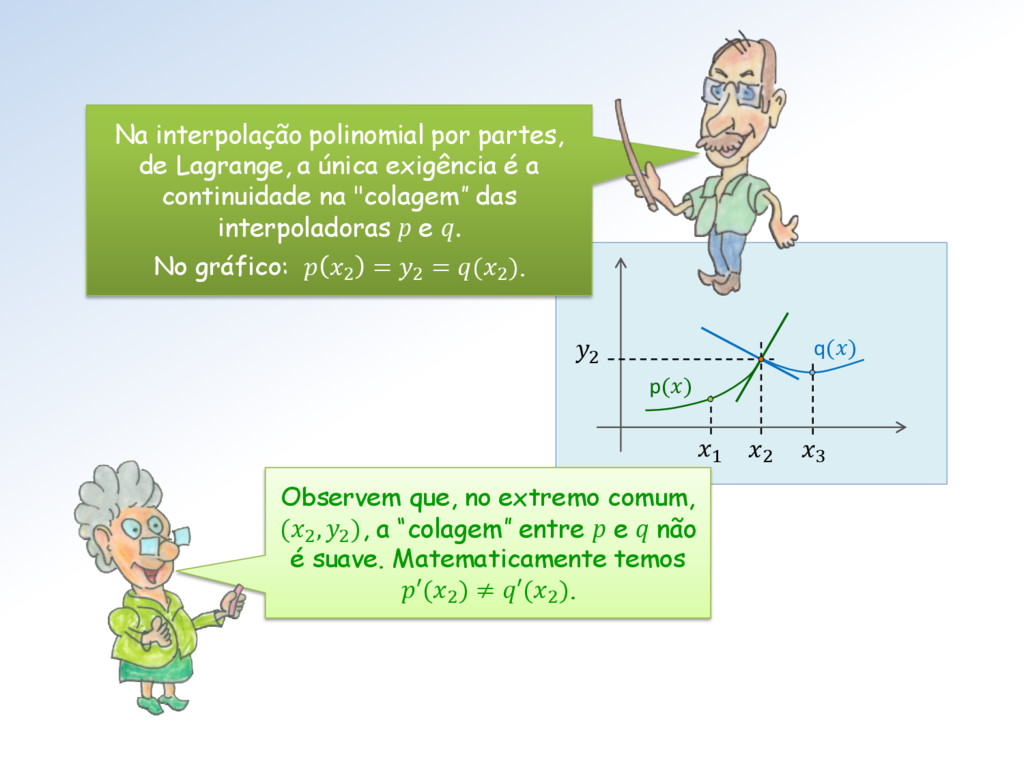
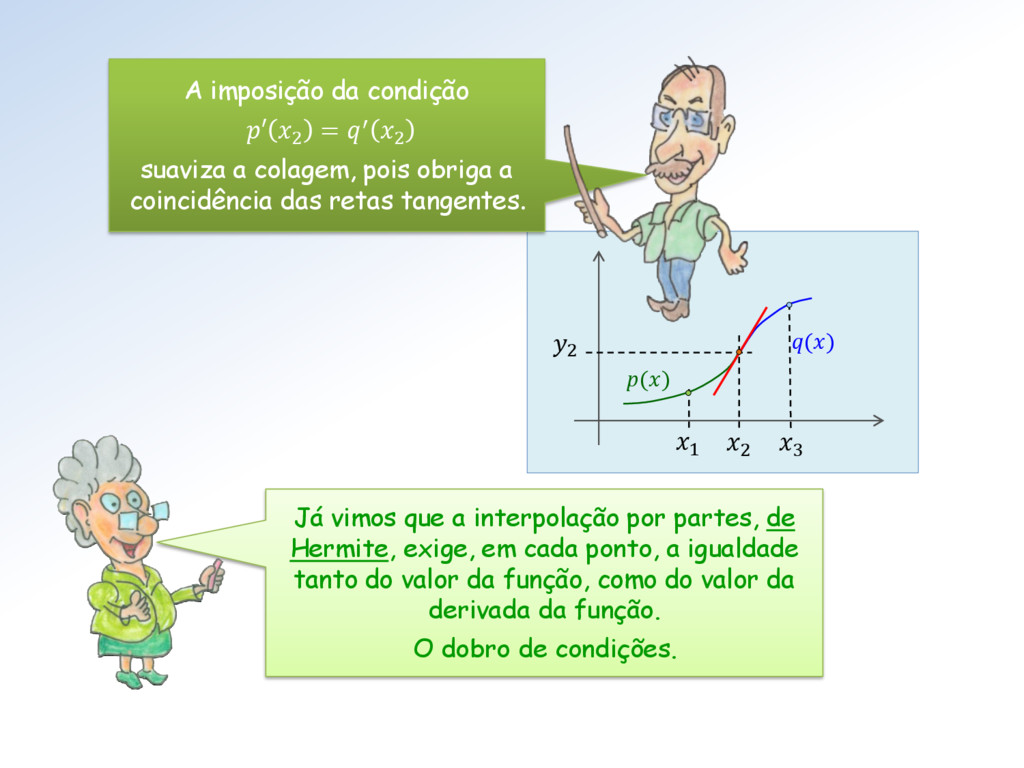
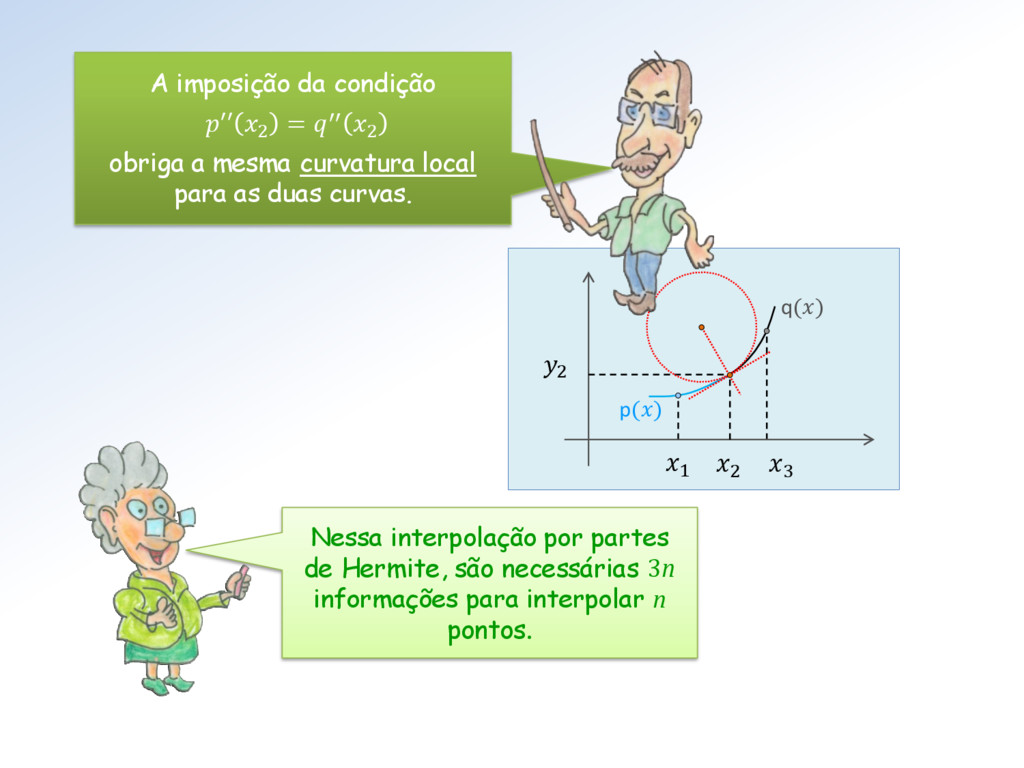
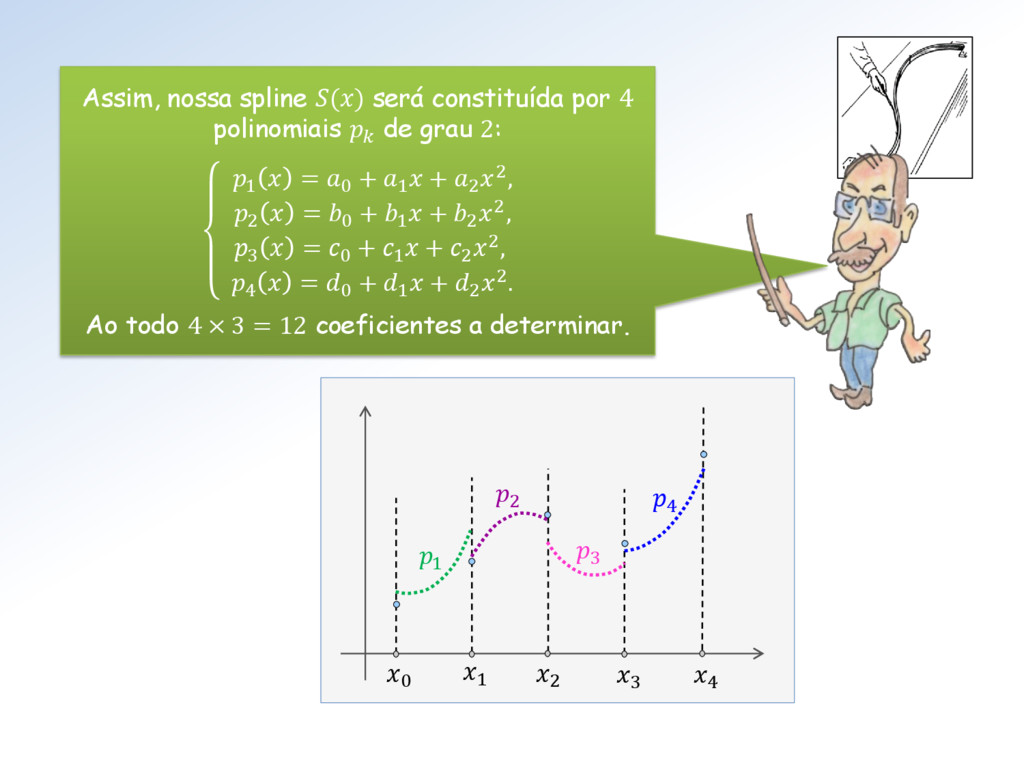
→ ℝ, de classe 2[, ] que, restrita a cada subintervalo , +1 , = 1,2, ⋯ , é uma polinomial de grau 3. De forma mais explícita, ela satisfaz: 1) = () para ∈ . +1 , k = 1,2, ⋯ , 2) = , = 1,2, ⋯ , 3) = +1 , = 1,2, ⋯ , − 1 4) ′ = ′+1 , = 1,2, ⋯ , − 1 5) ′′ = ′′+1 , = 1,2, ⋯ , − 1
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![• Recebe: 1. Um intervalo [, ], 2. A expressão](https://files.speakerdeck.com/presentations/734a18d56e684502b249d8fcfea70729/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
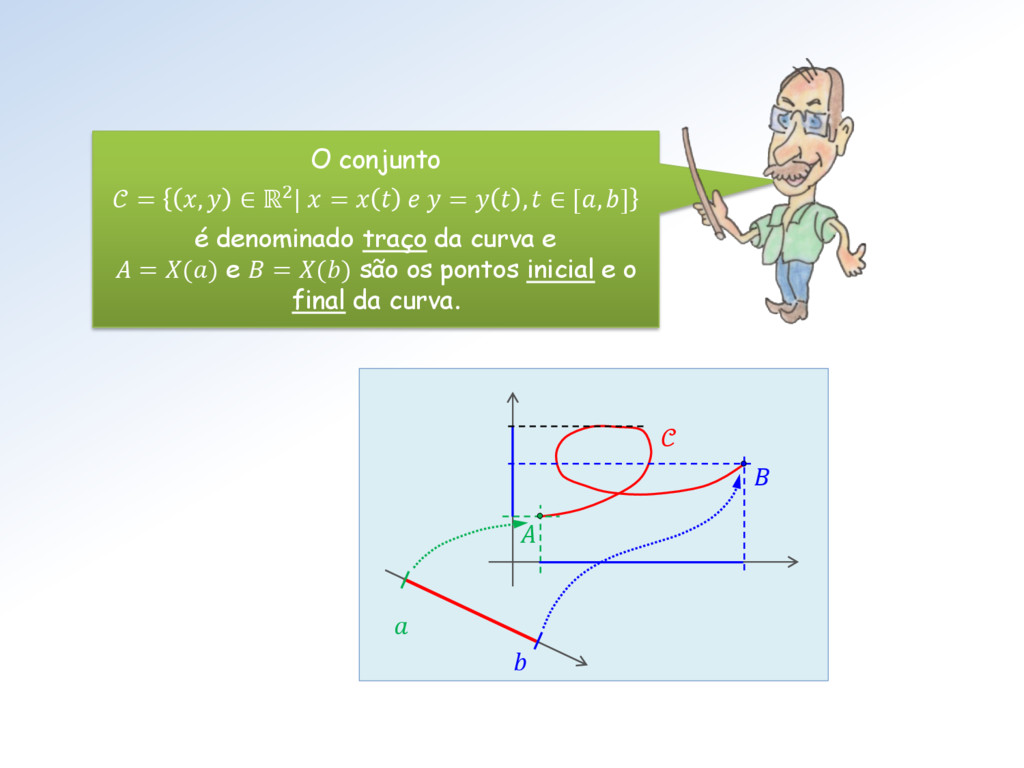
![Seja () uma função definida num intervalo [, ]. Uma](https://files.speakerdeck.com/presentations/734a18d56e684502b249d8fcfea70729/slide_98.jpg){kind=link}
![Uma “spline” cúbica interpolante: É uma função : [, ]](https://files.speakerdeck.com/presentations/734a18d56e684502b249d8fcfea70729/slide_99.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}