Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
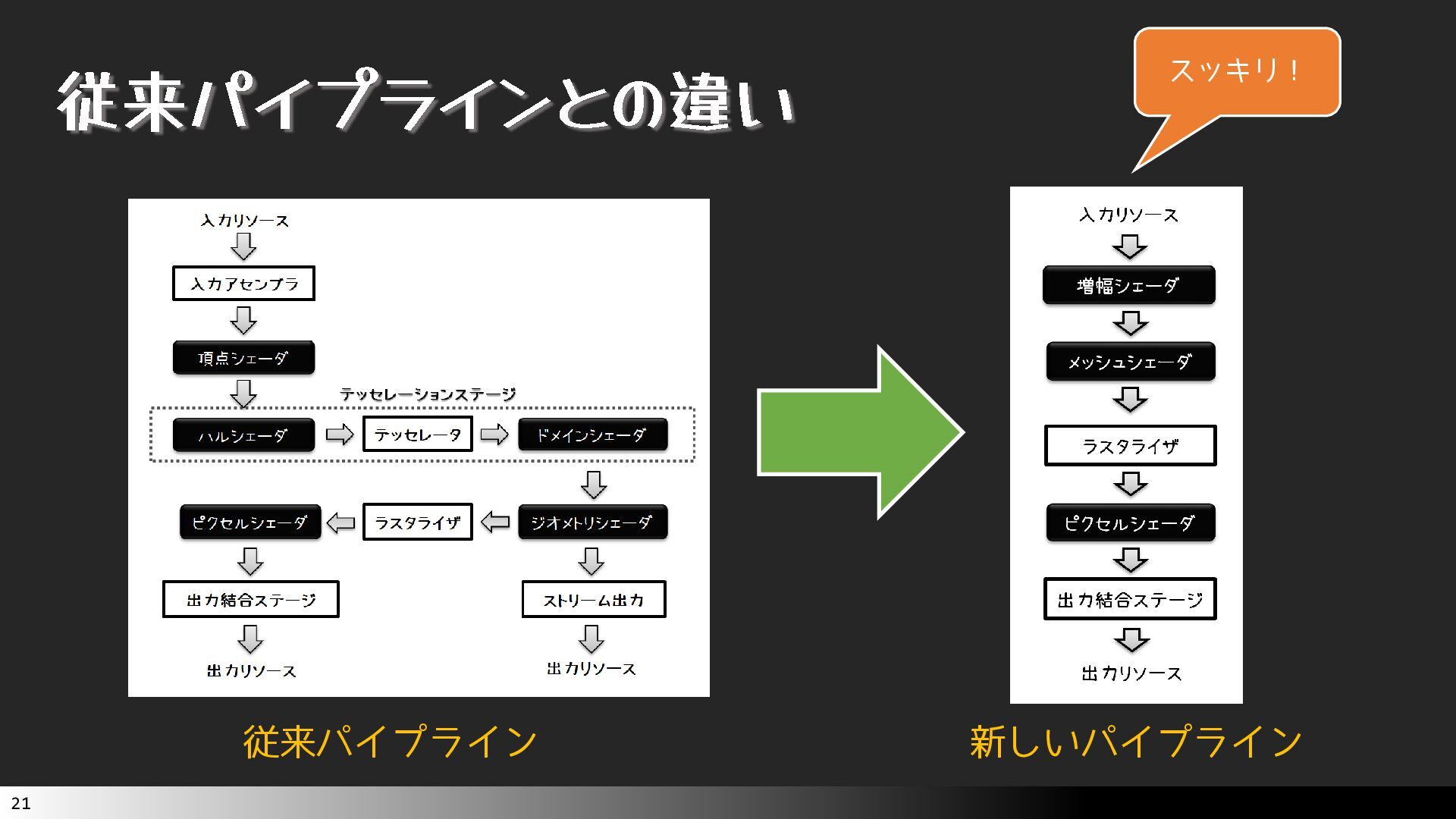
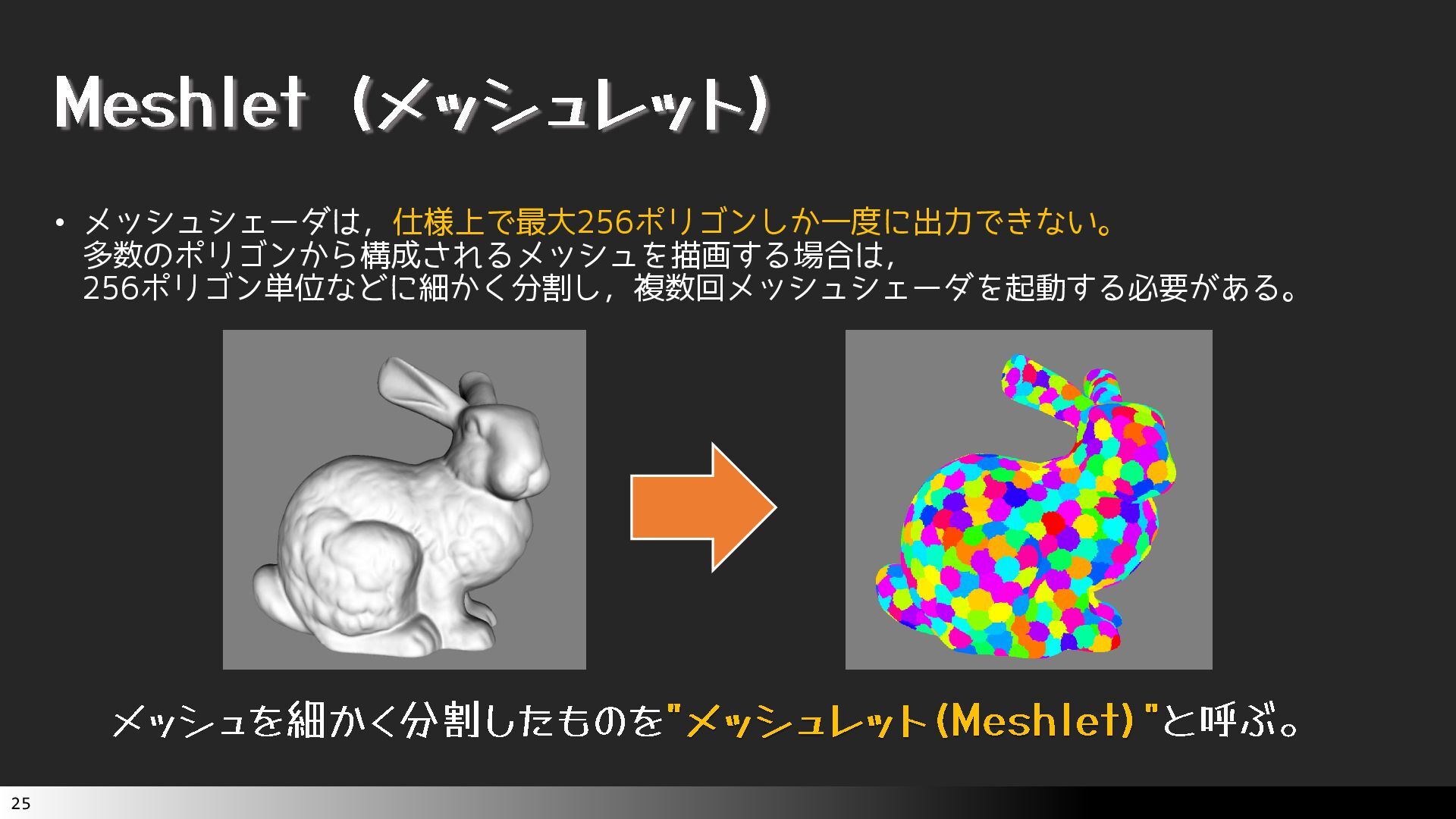
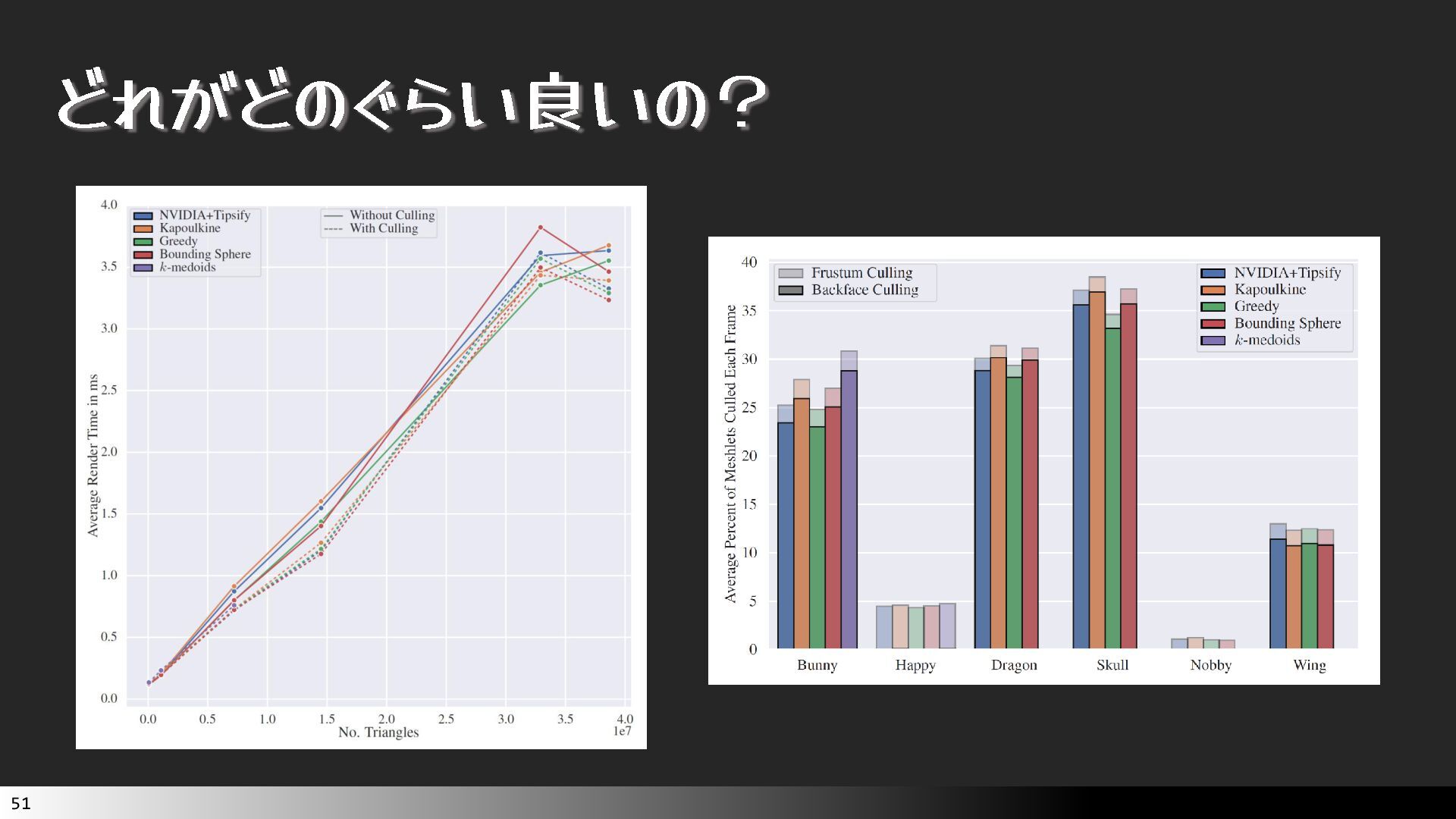
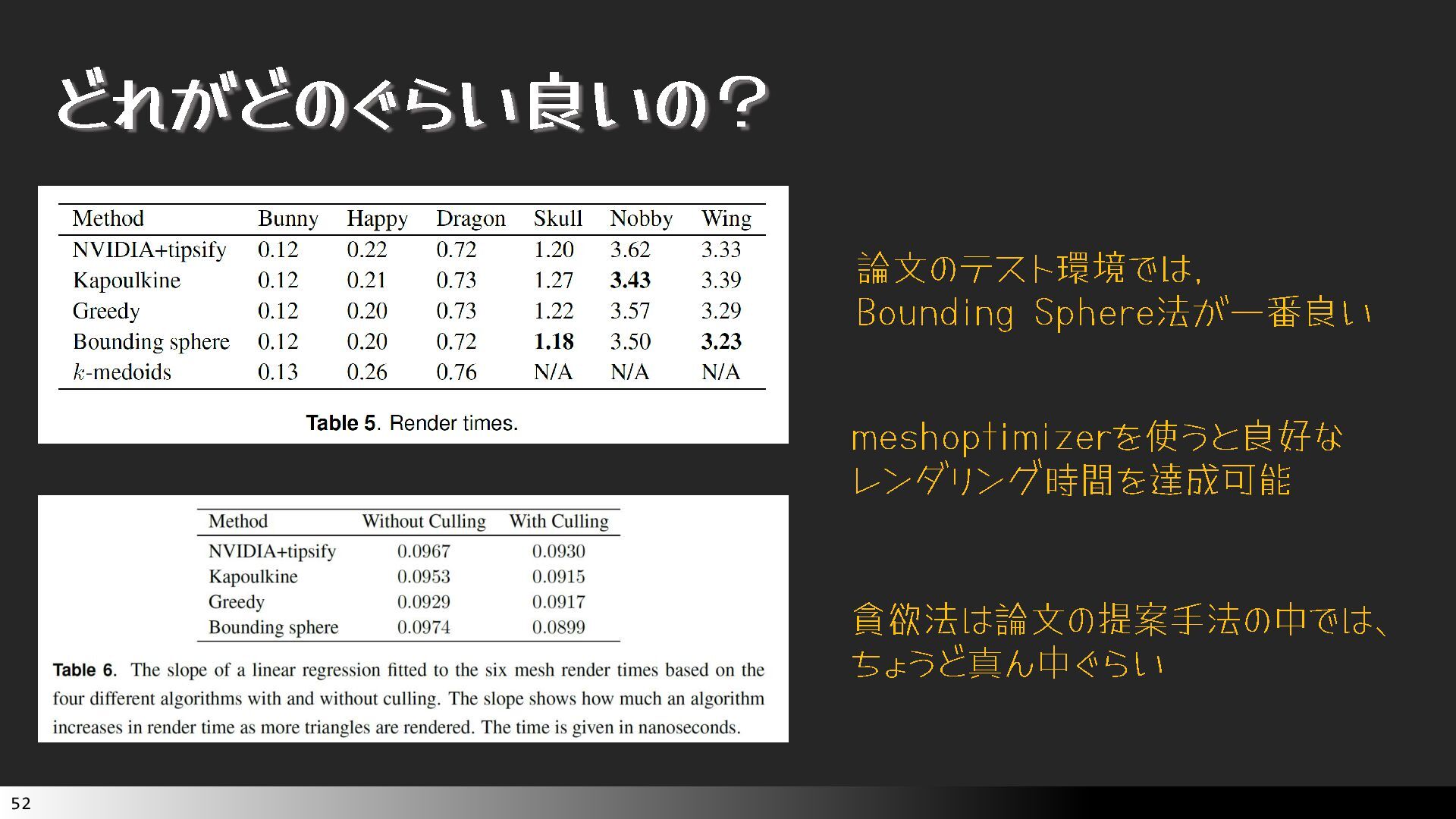
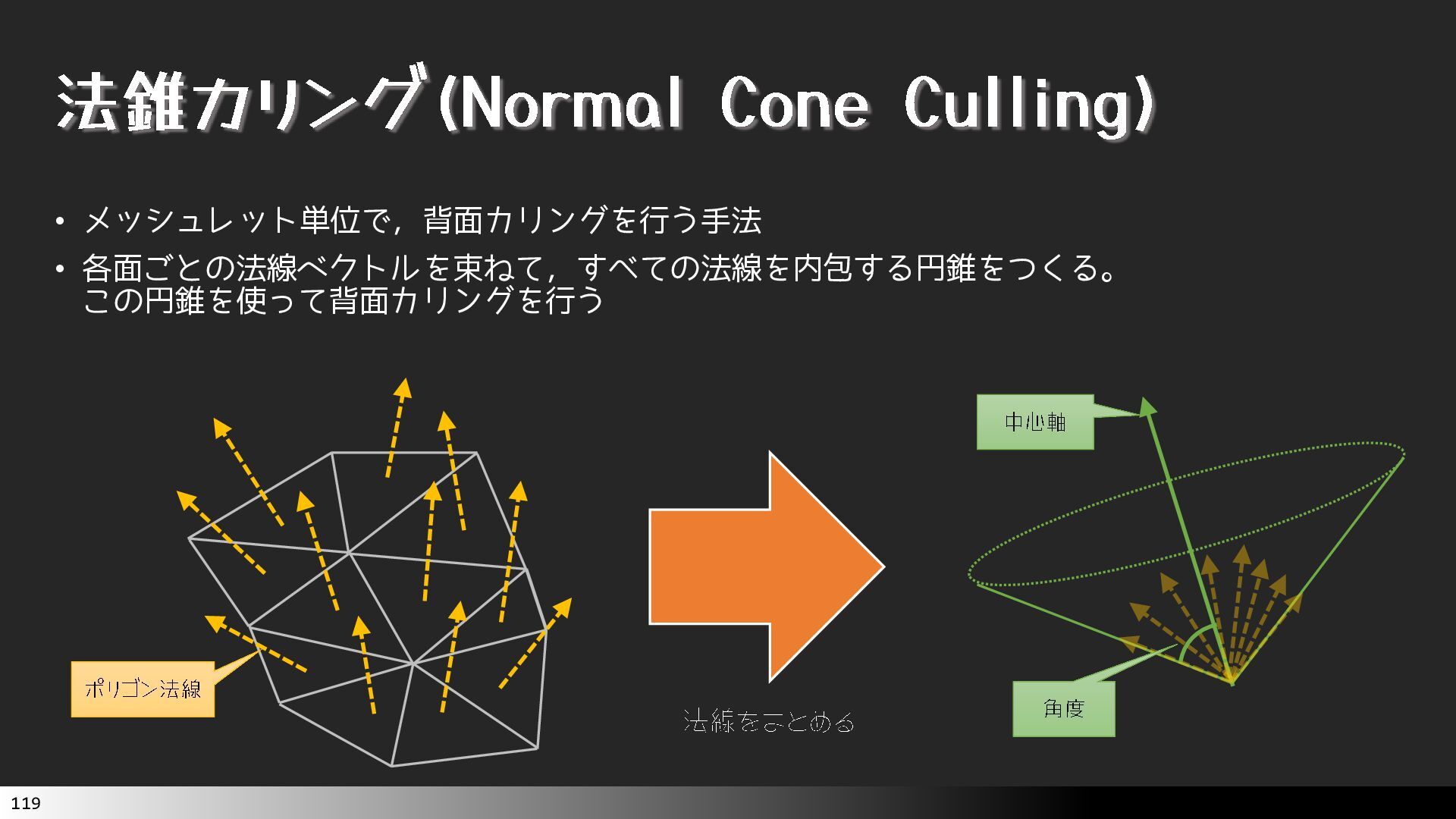
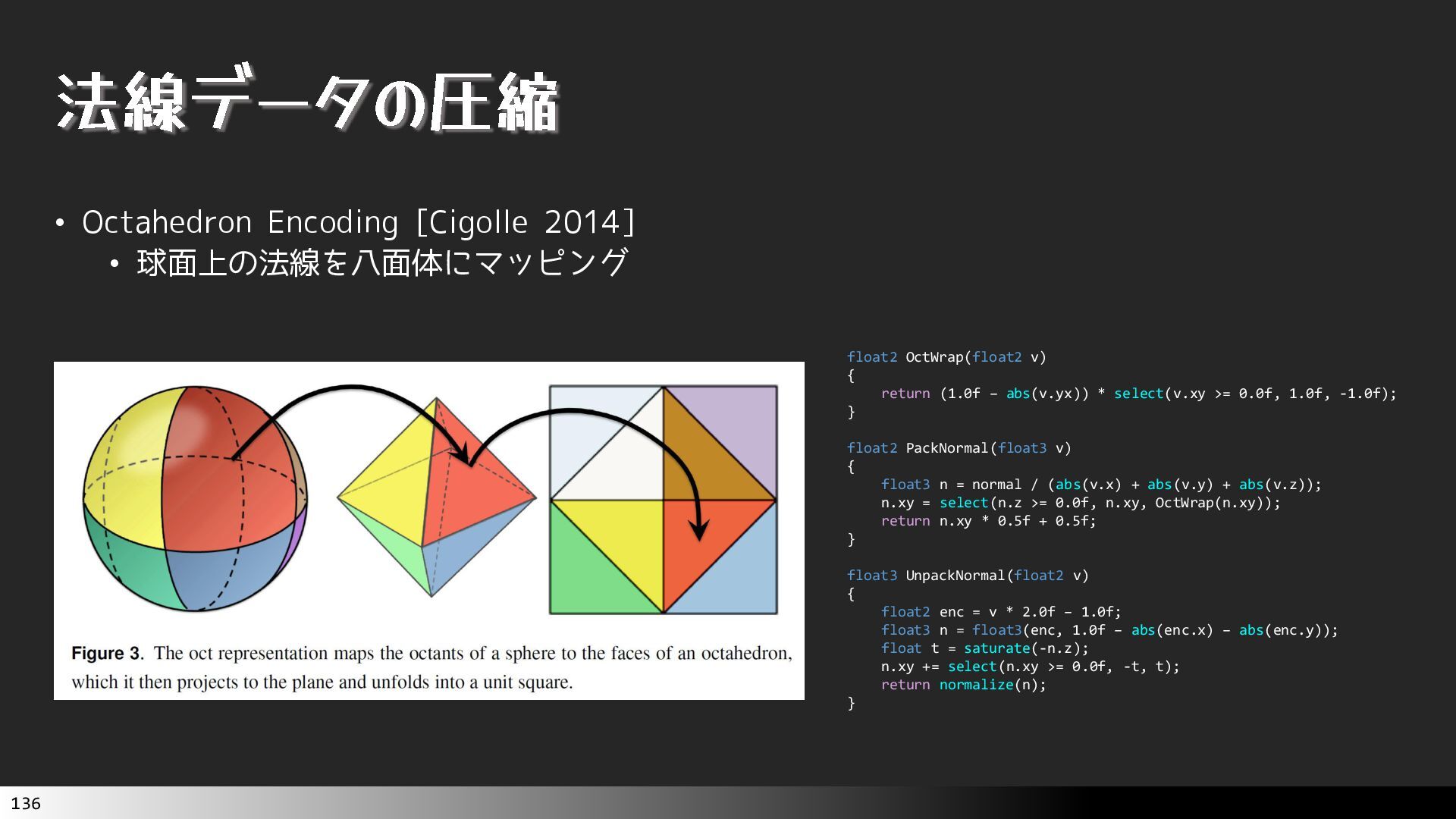
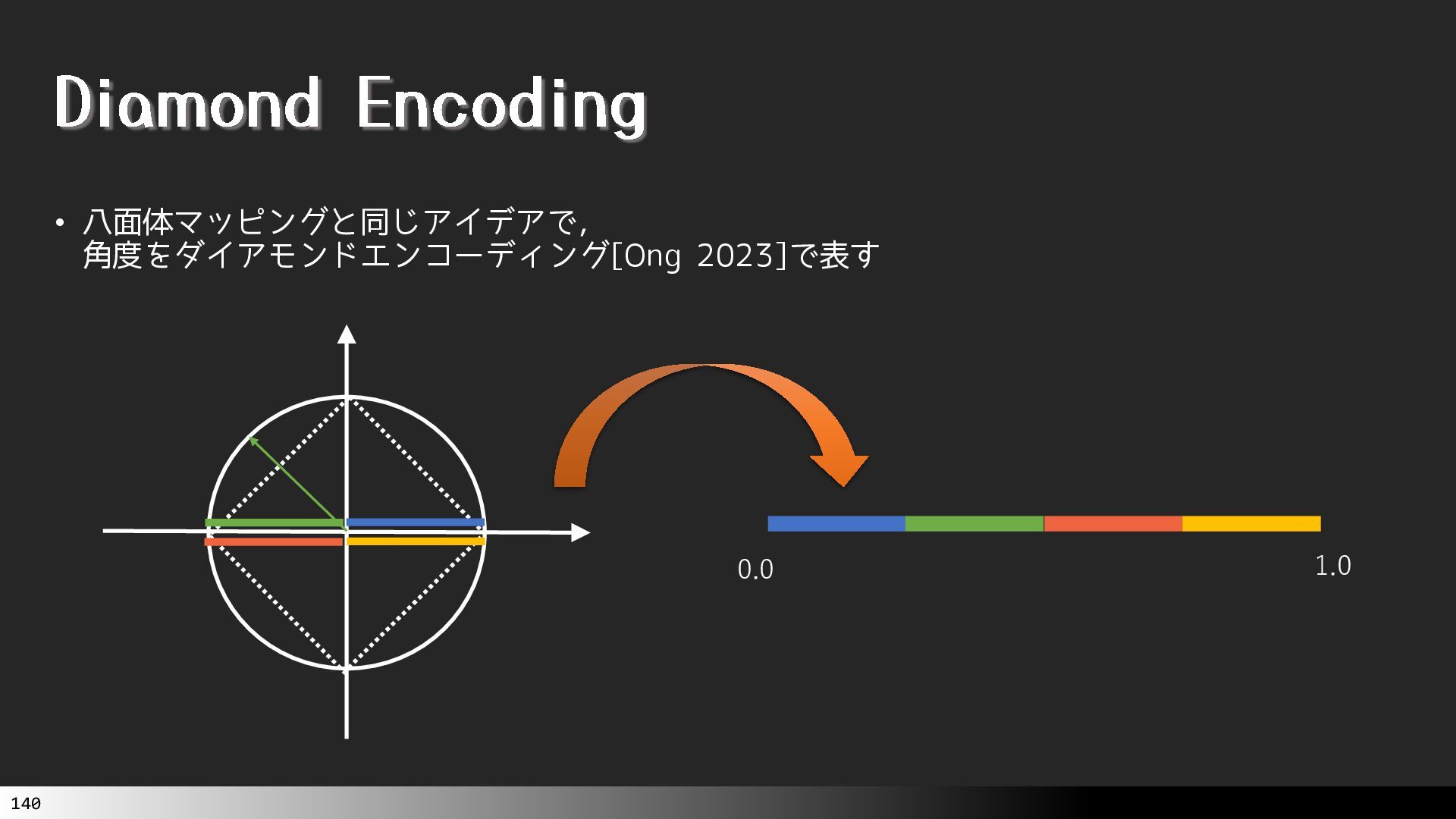
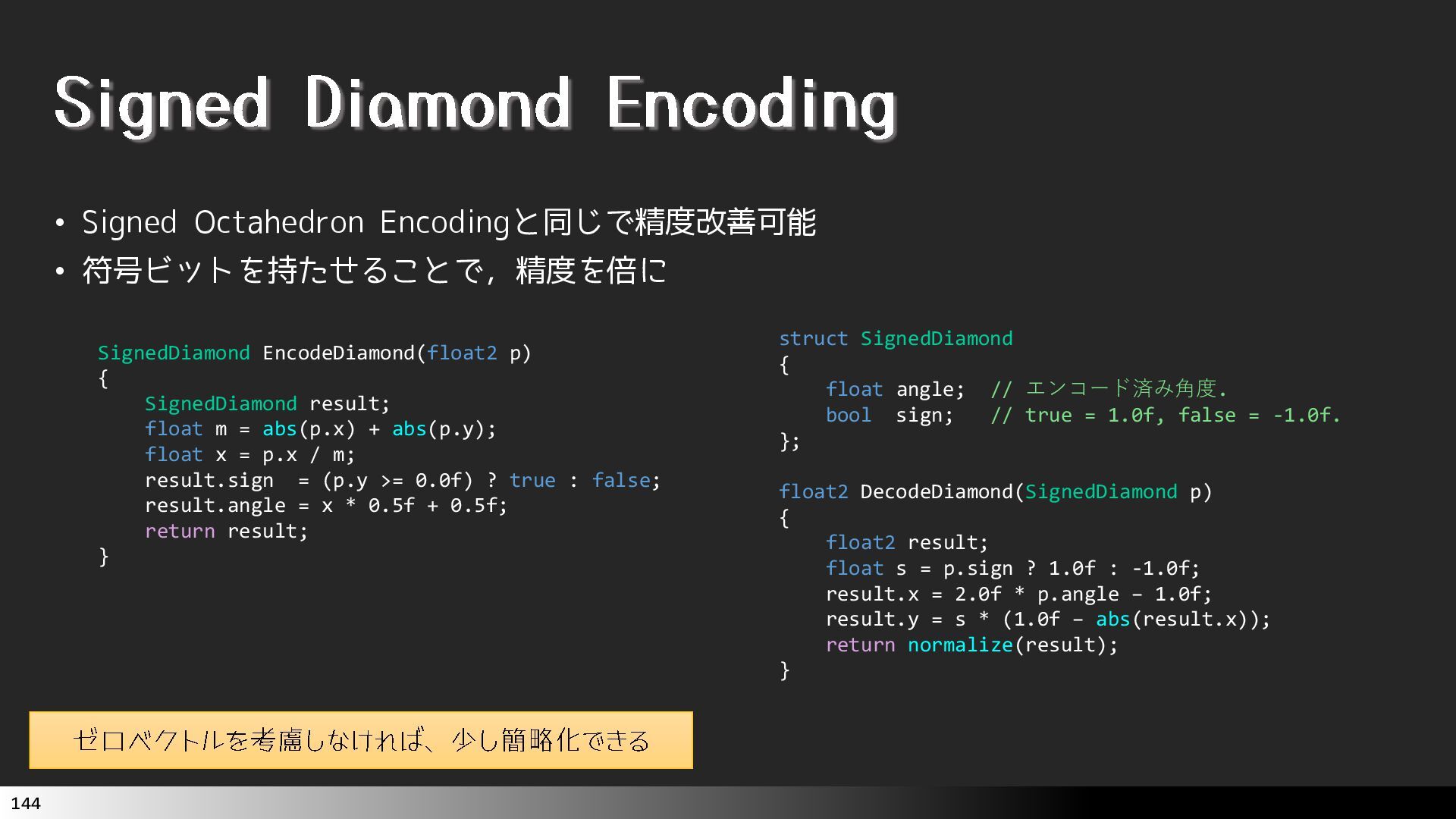
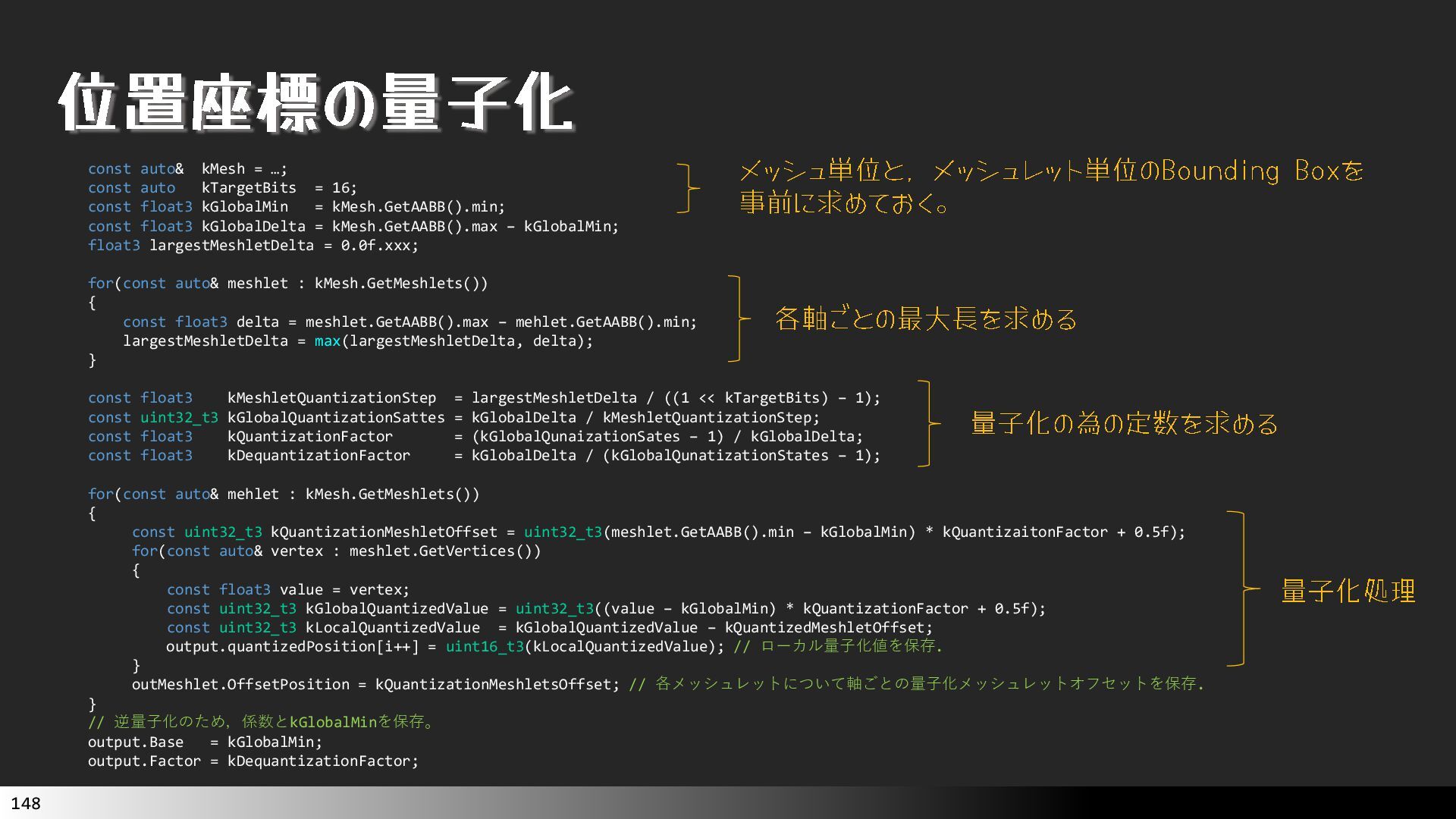
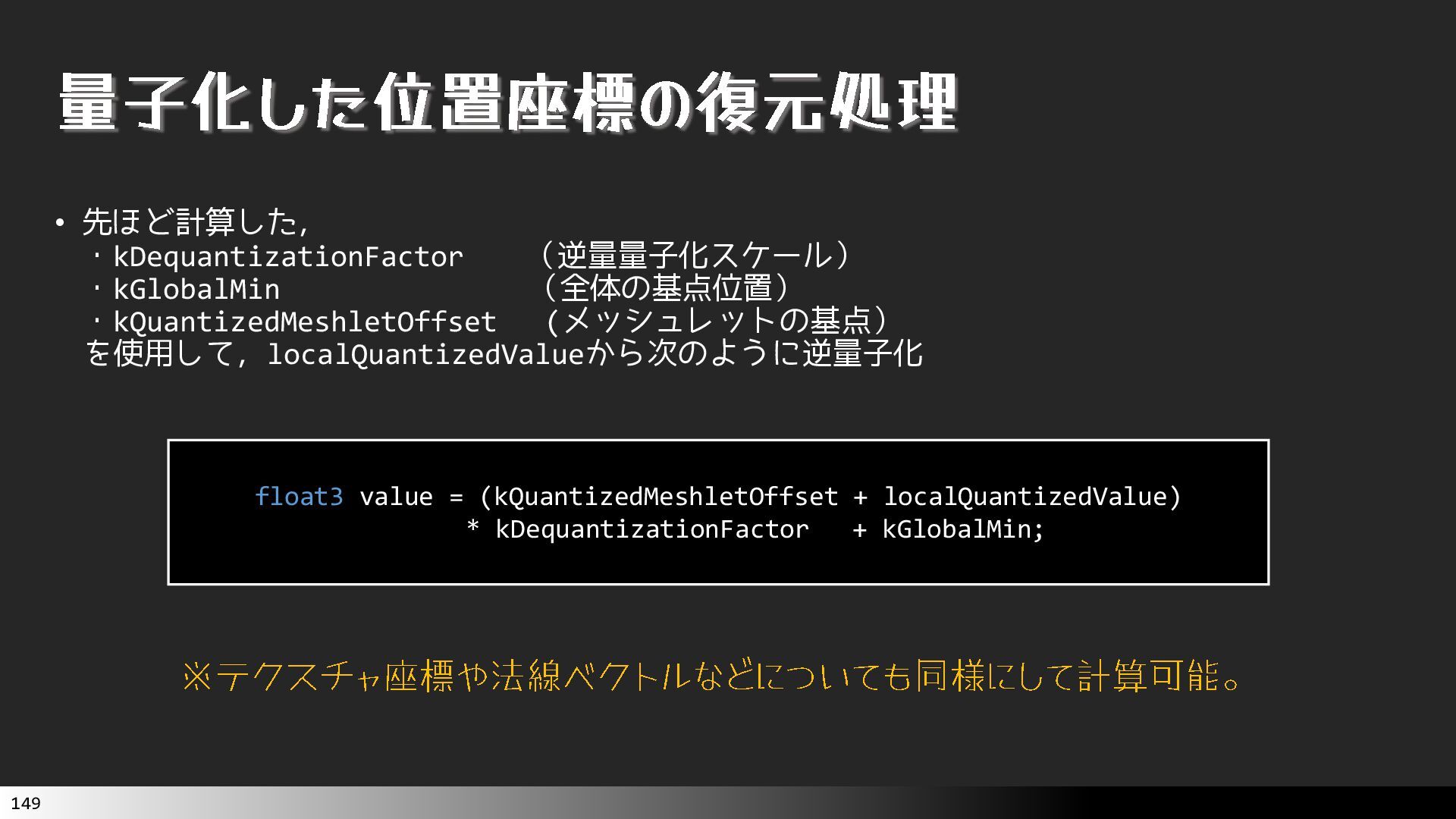
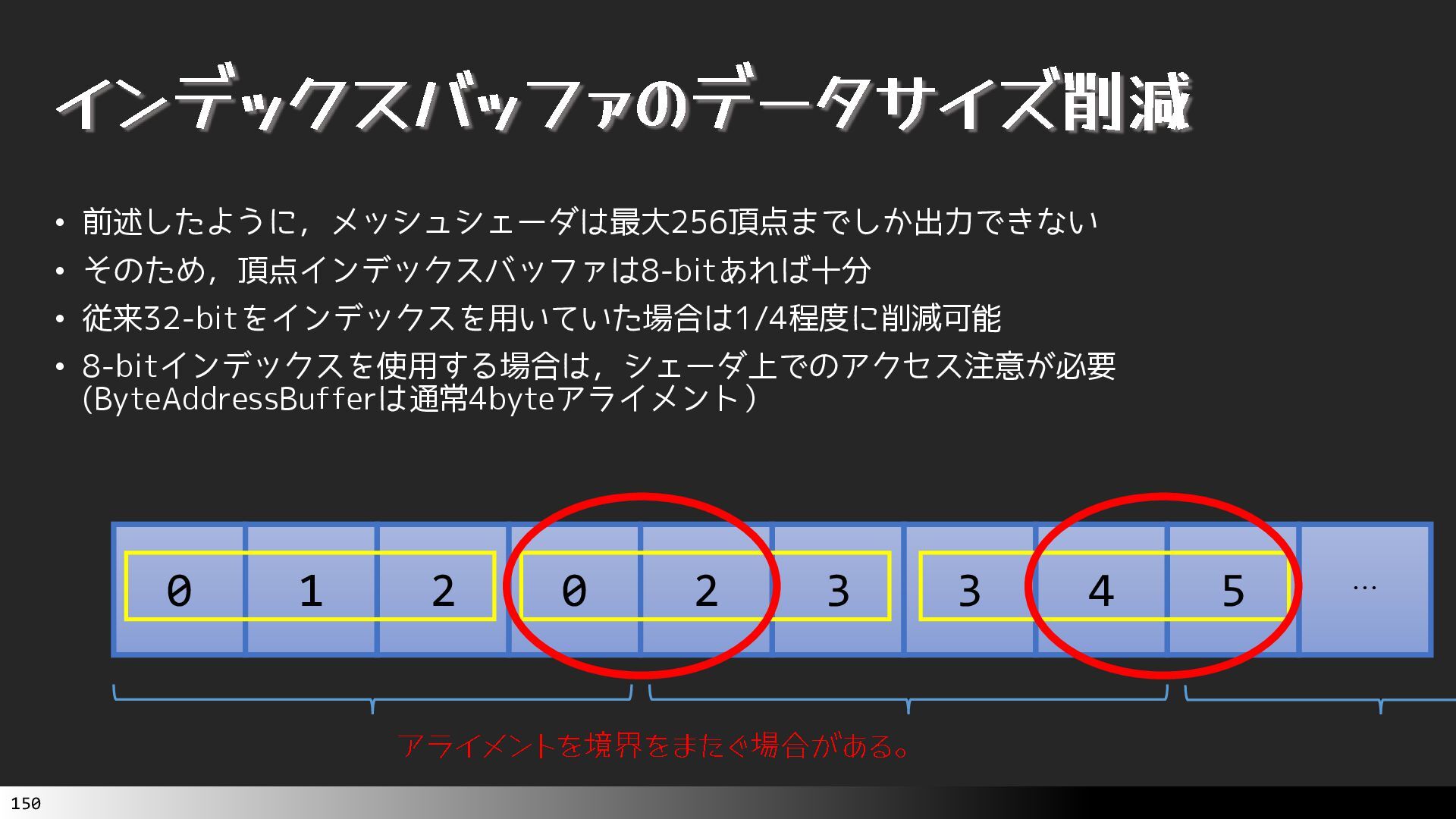
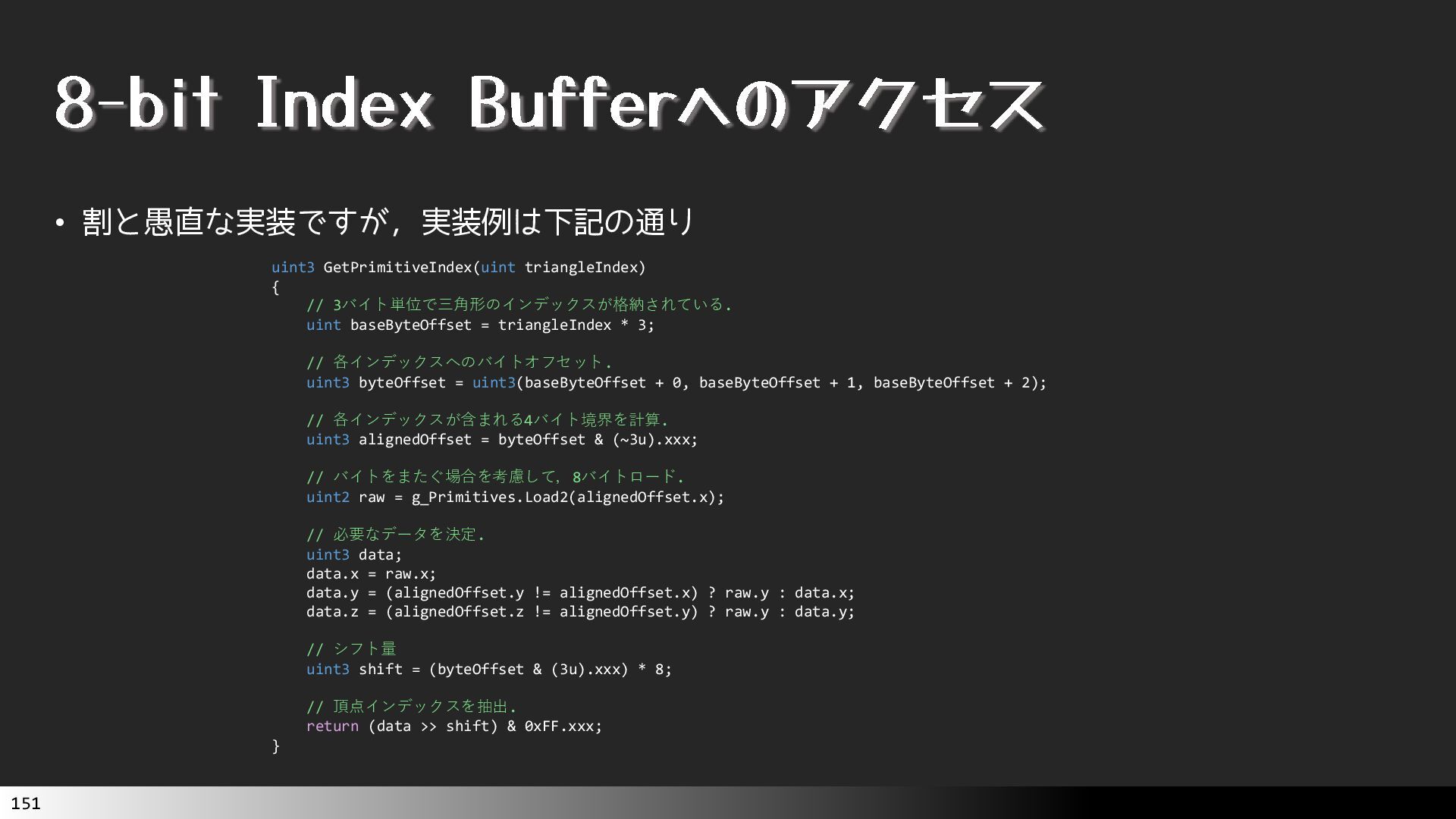
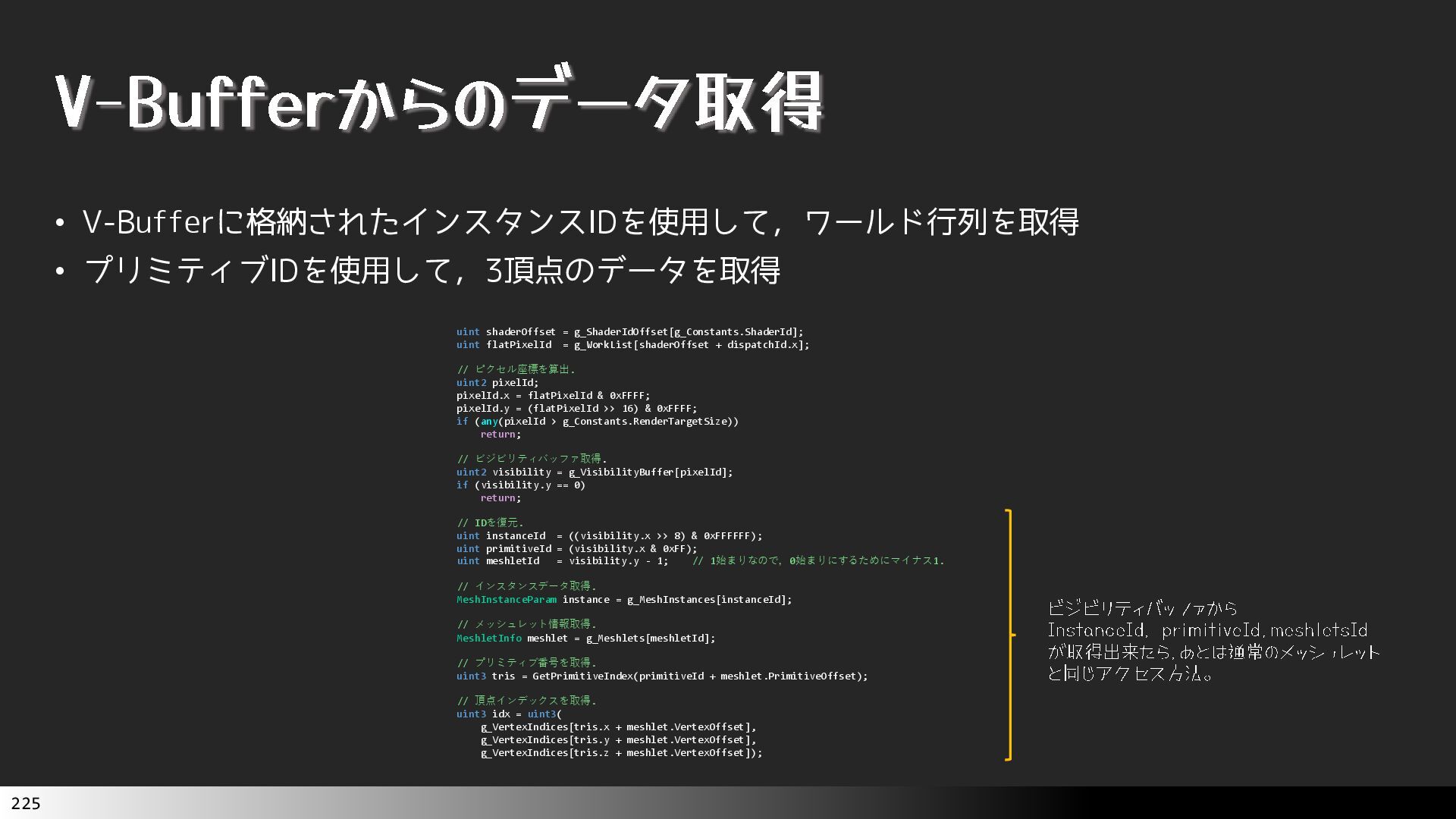
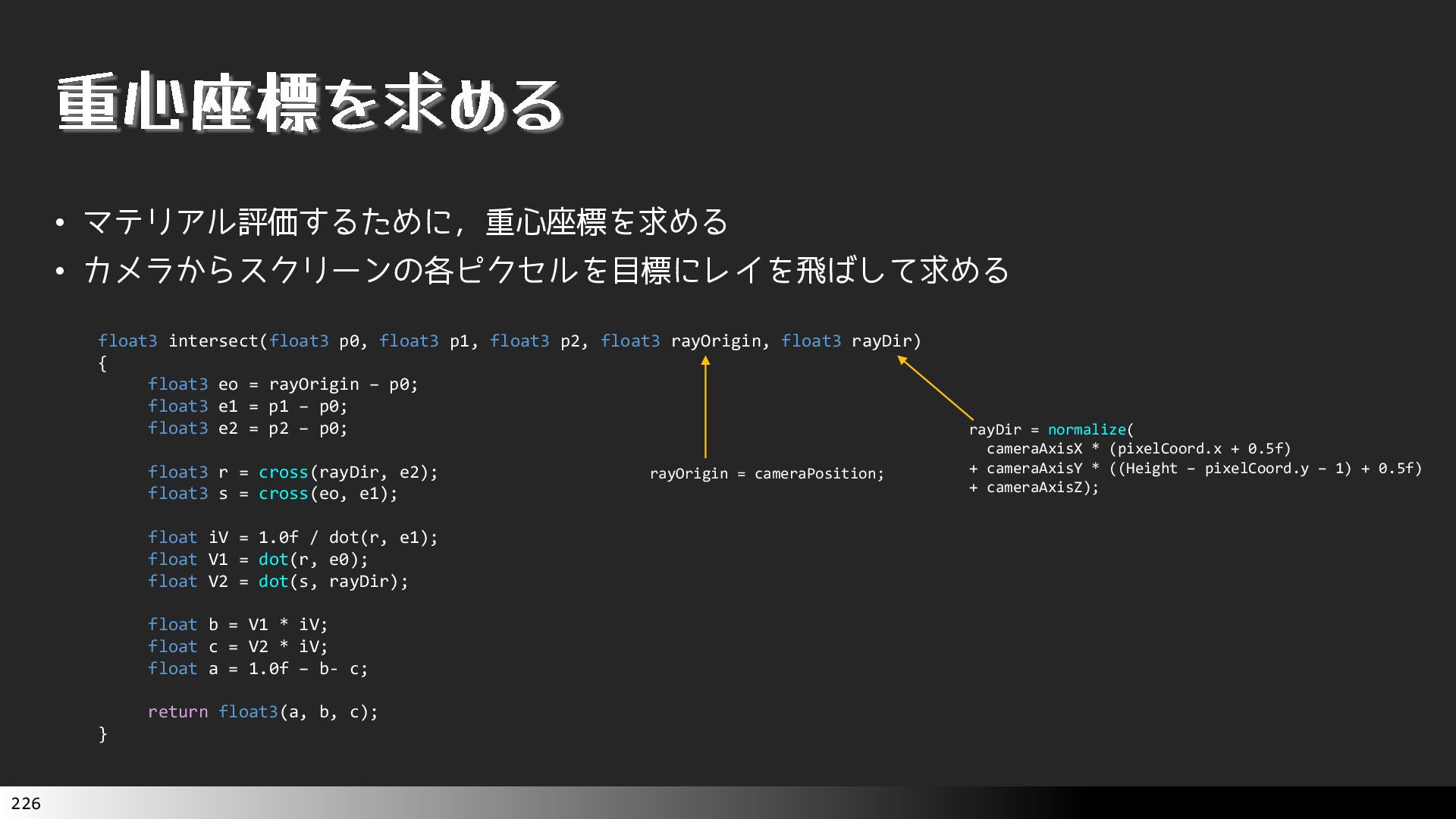
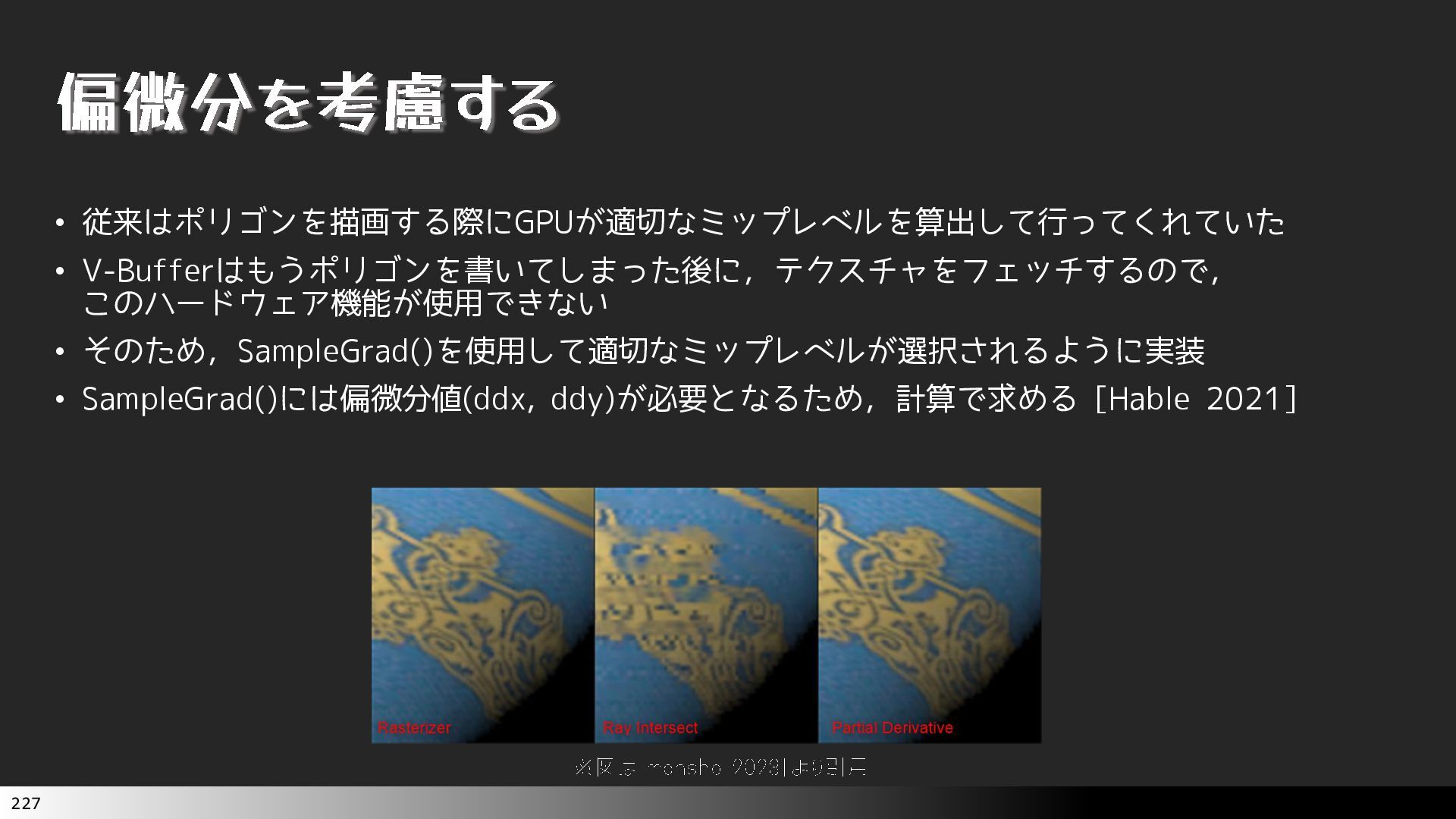
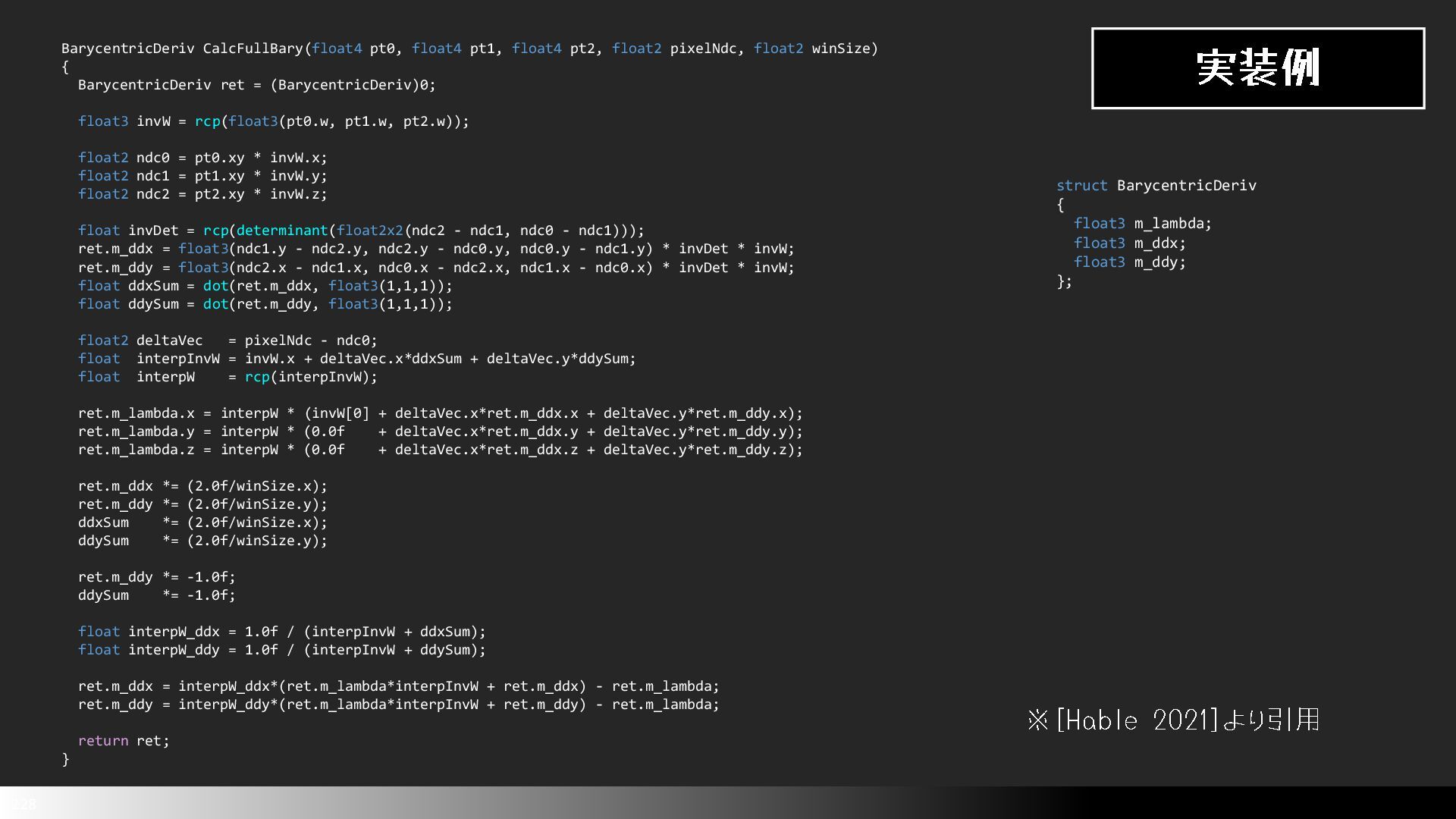
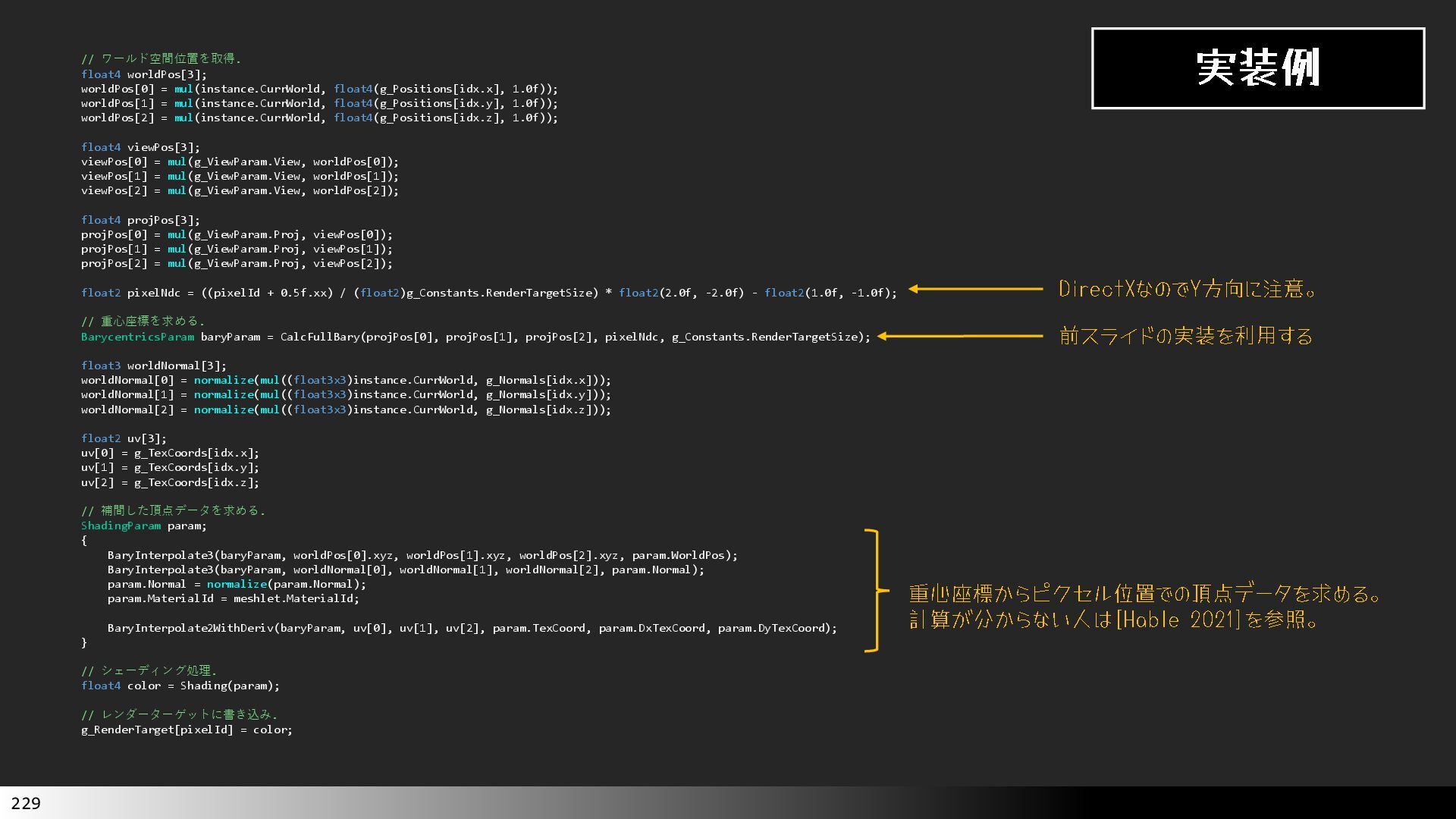
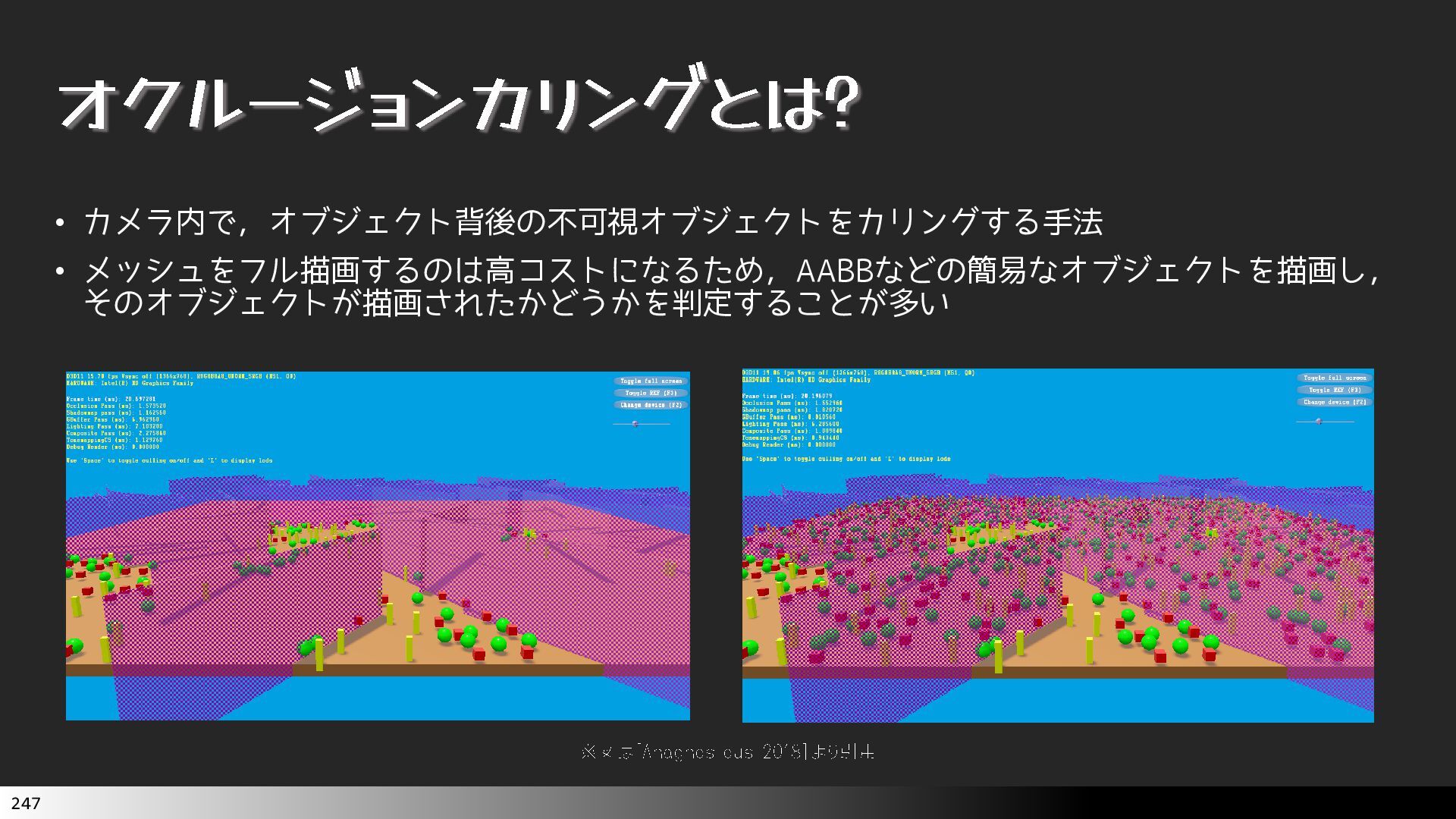
中級グラフィックス入門~効率的なメッシュレット描画~
Search
Sponsored
·
SiteGround - Reliable hosting with speed, security, and support you can count on.
→
Pocol
July 22, 2025
Programming
7.8k
5
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
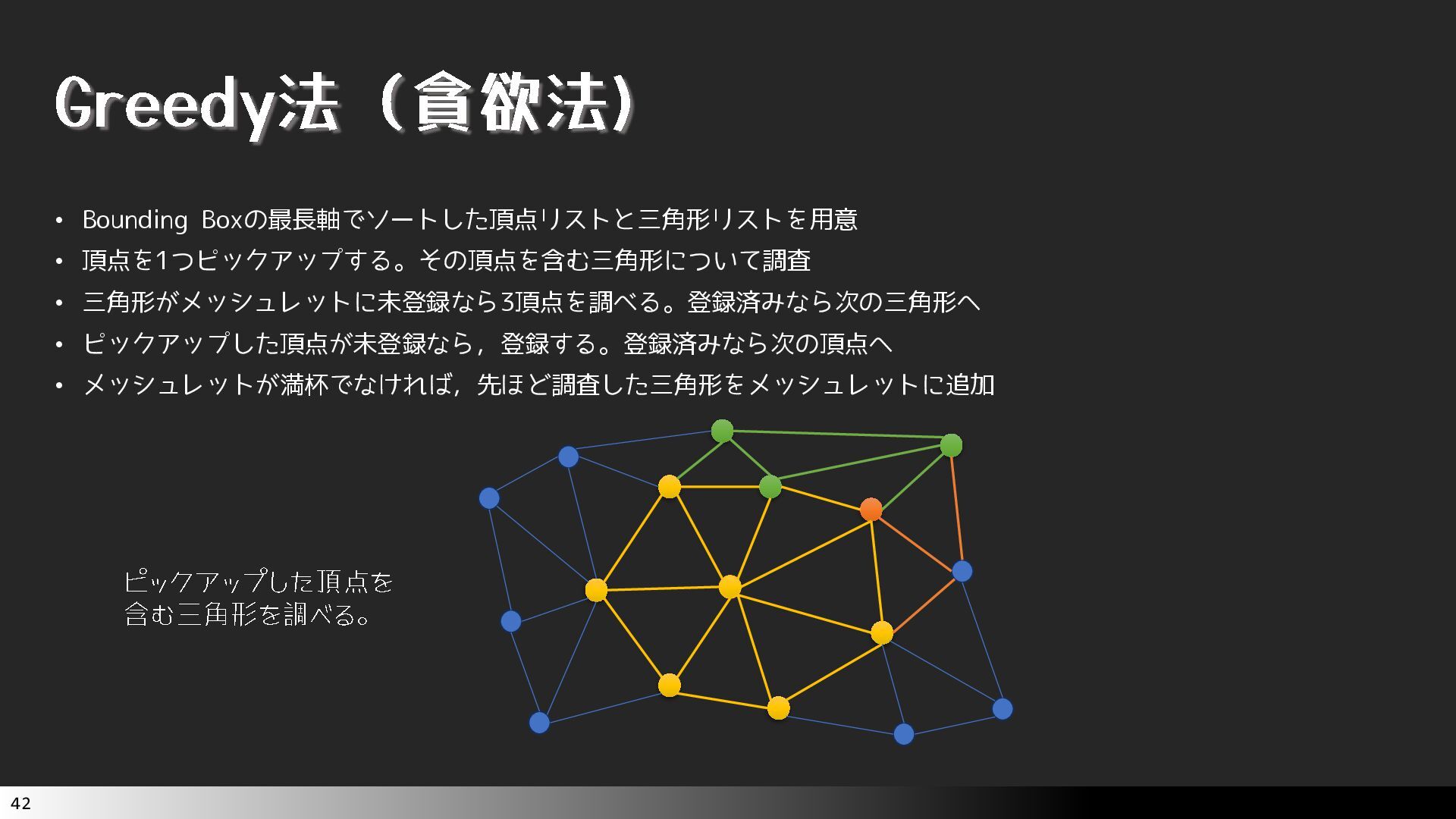
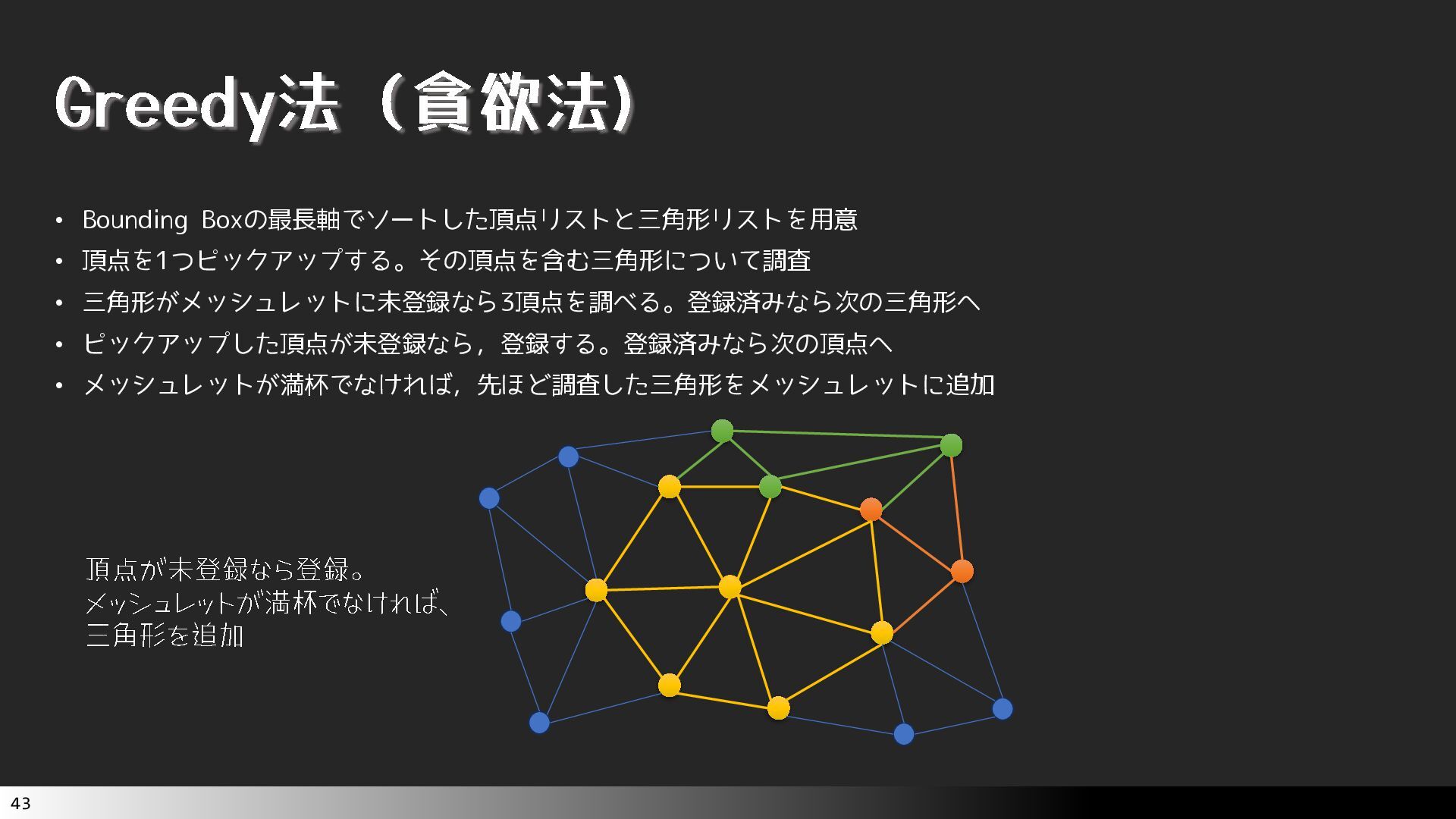
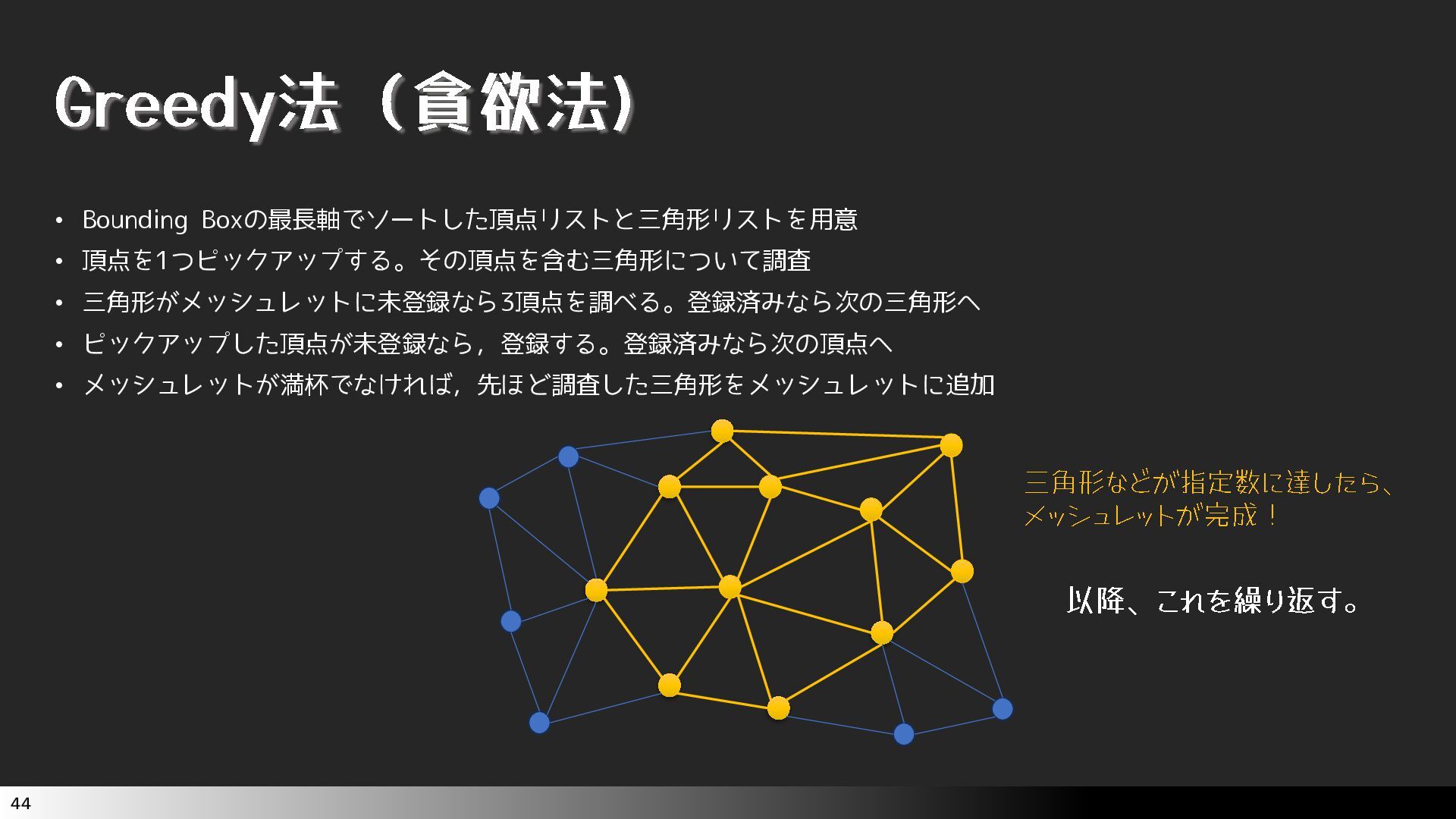
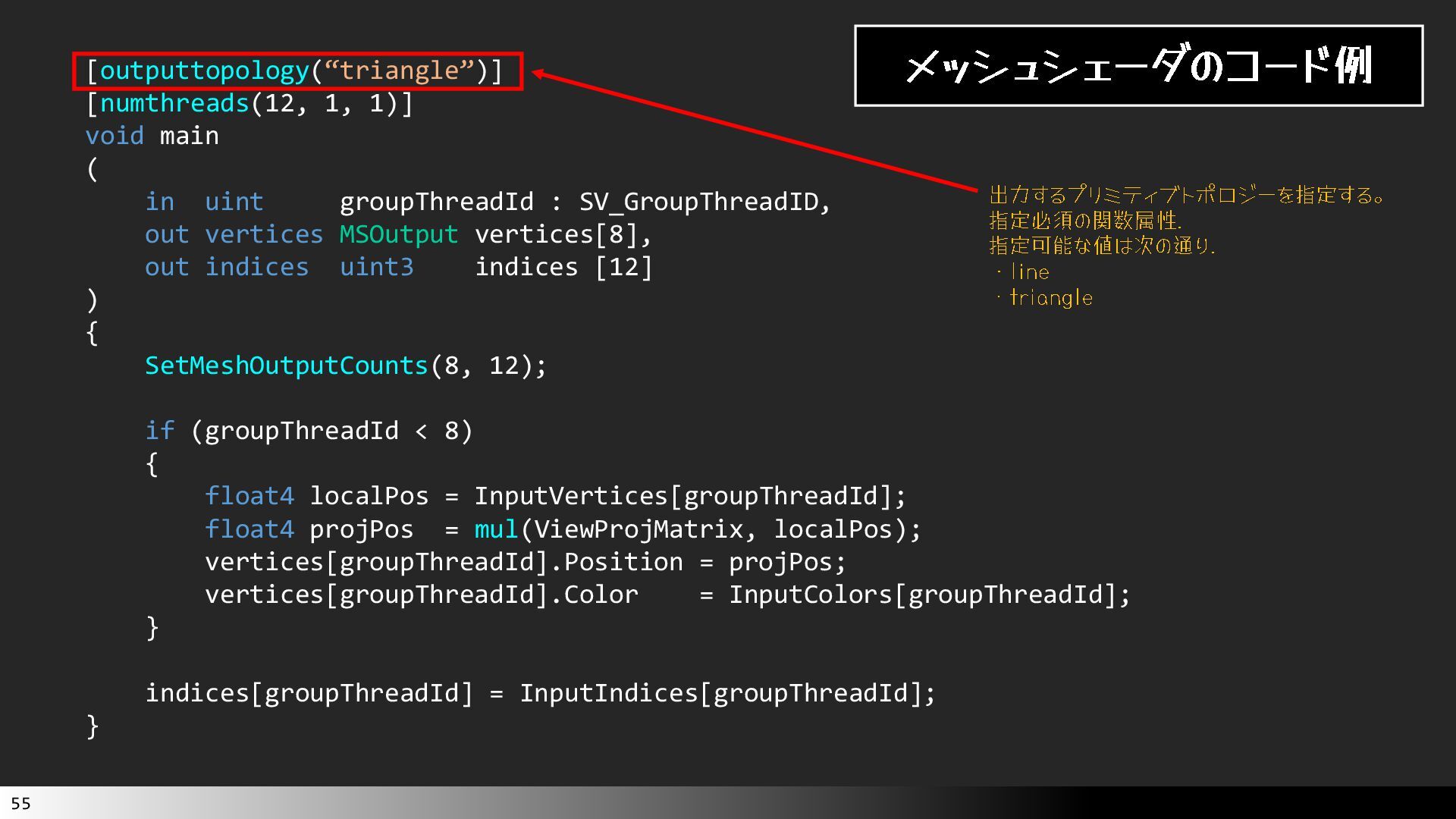
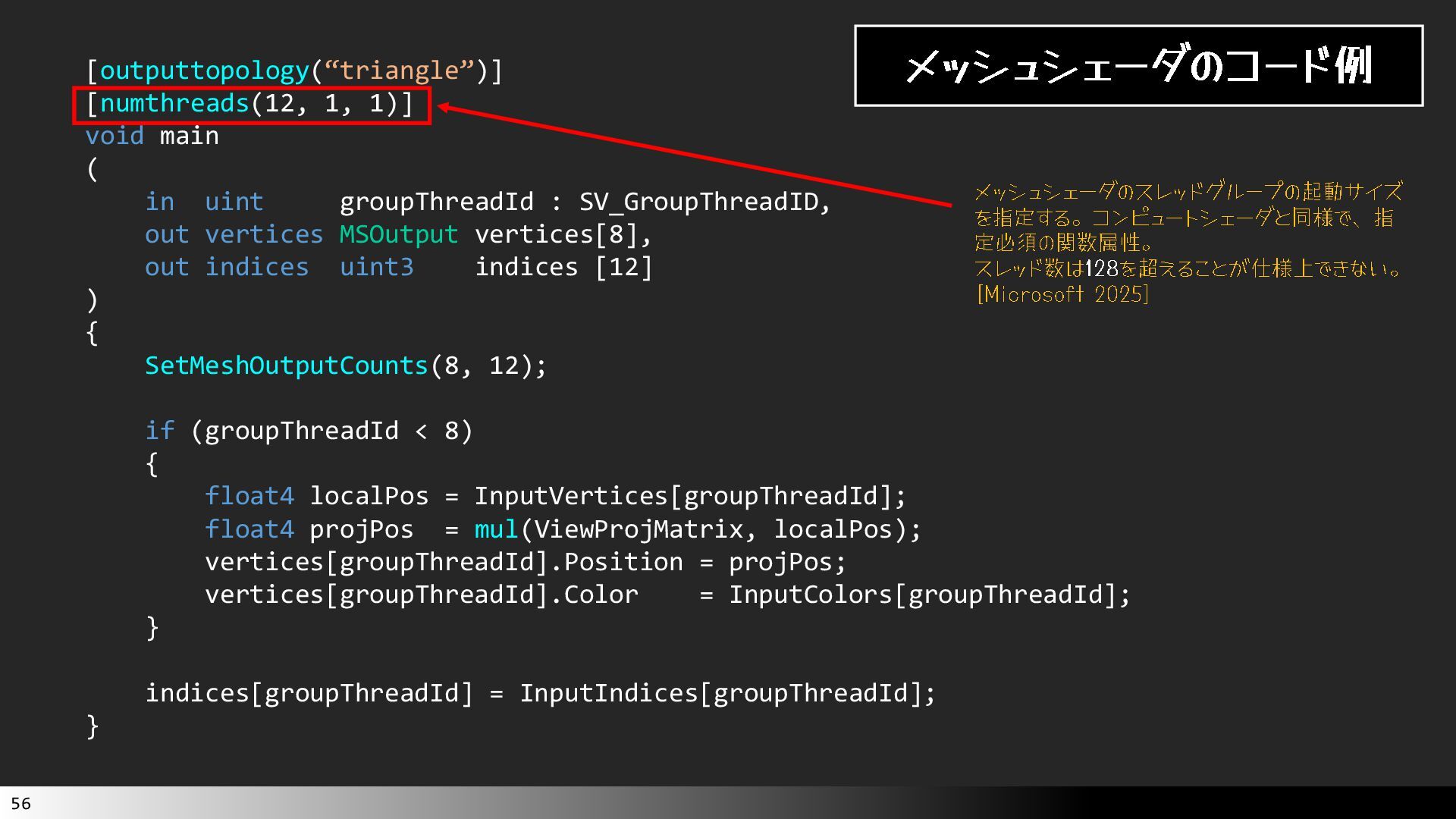
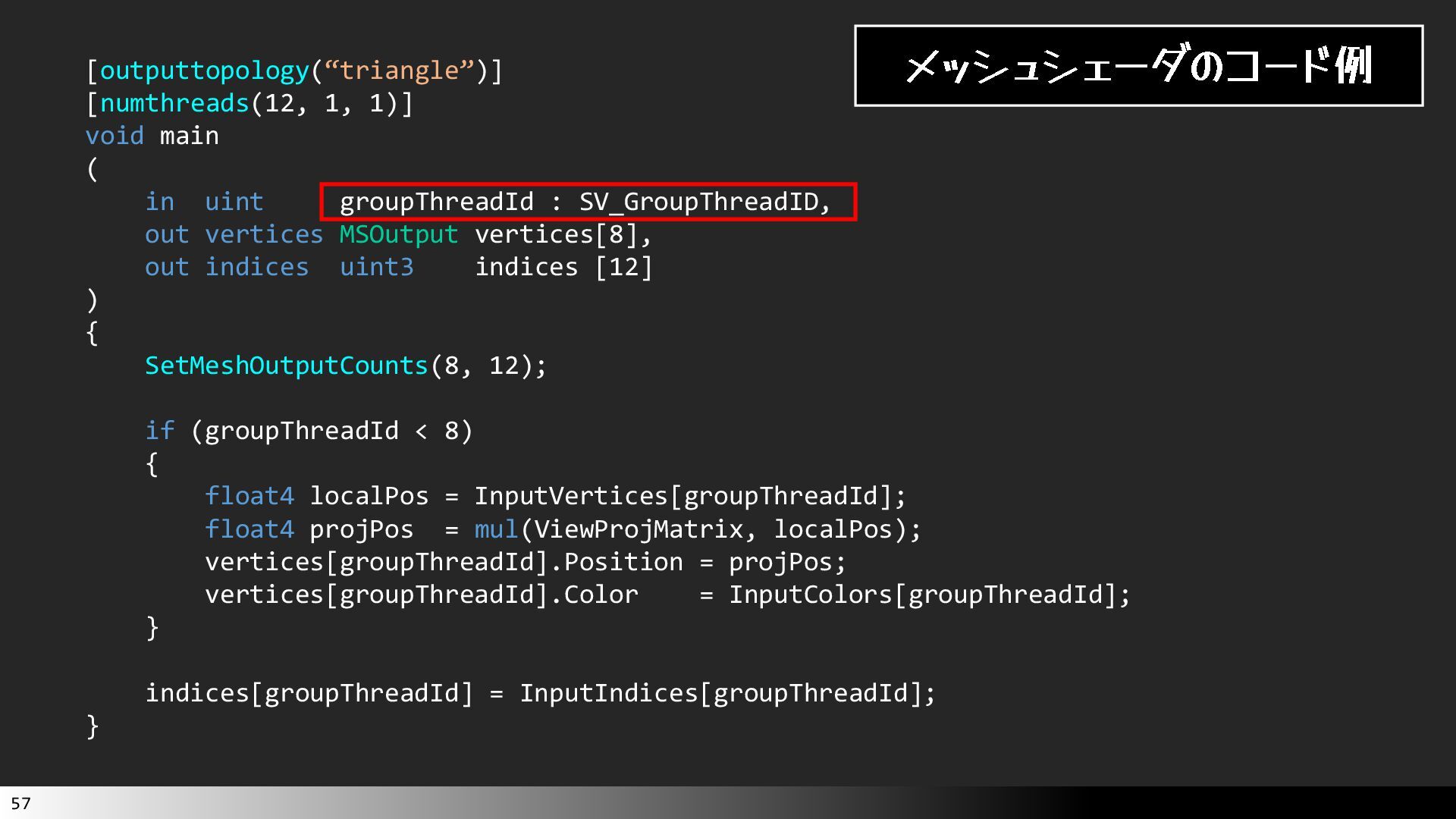
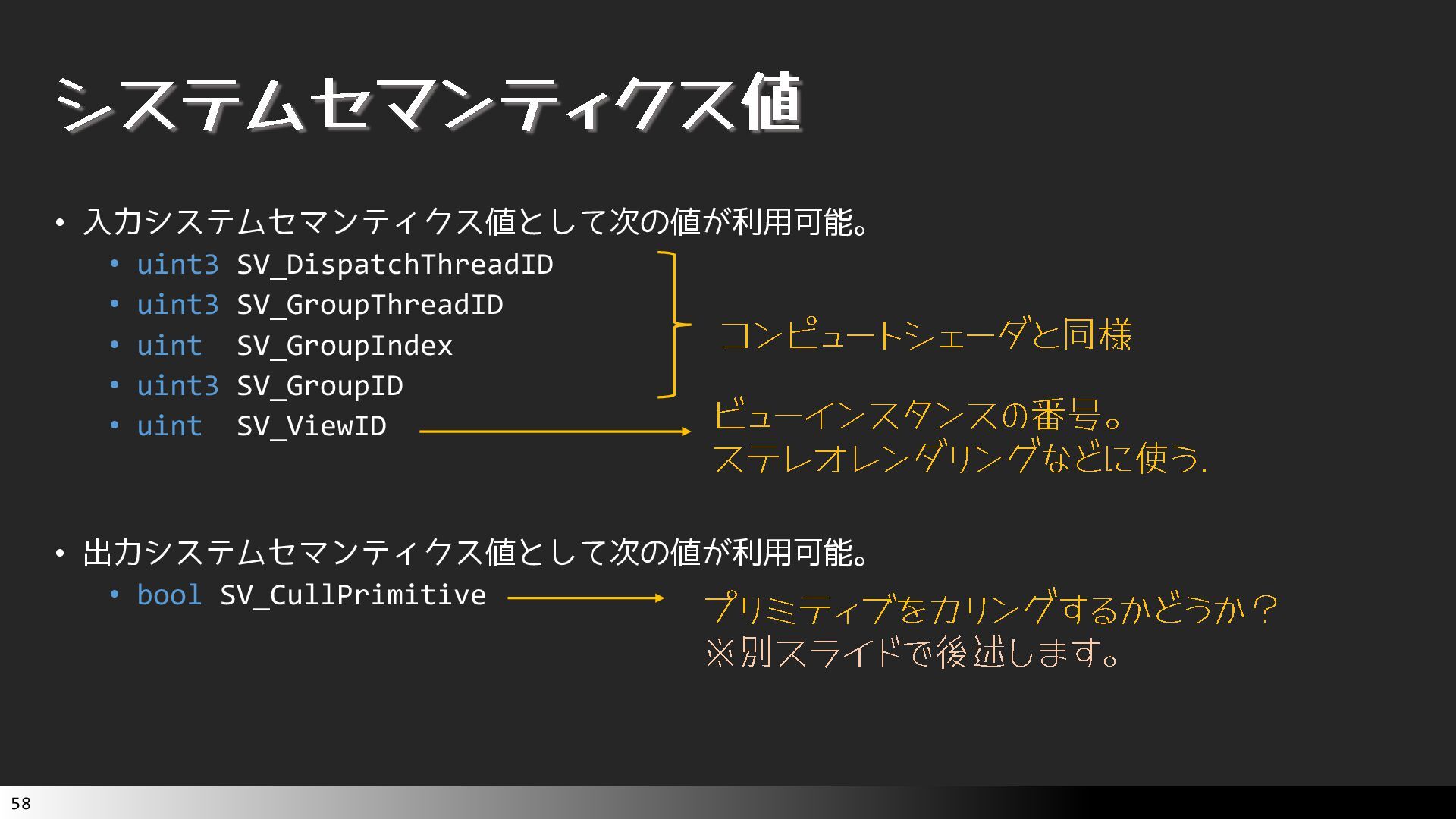
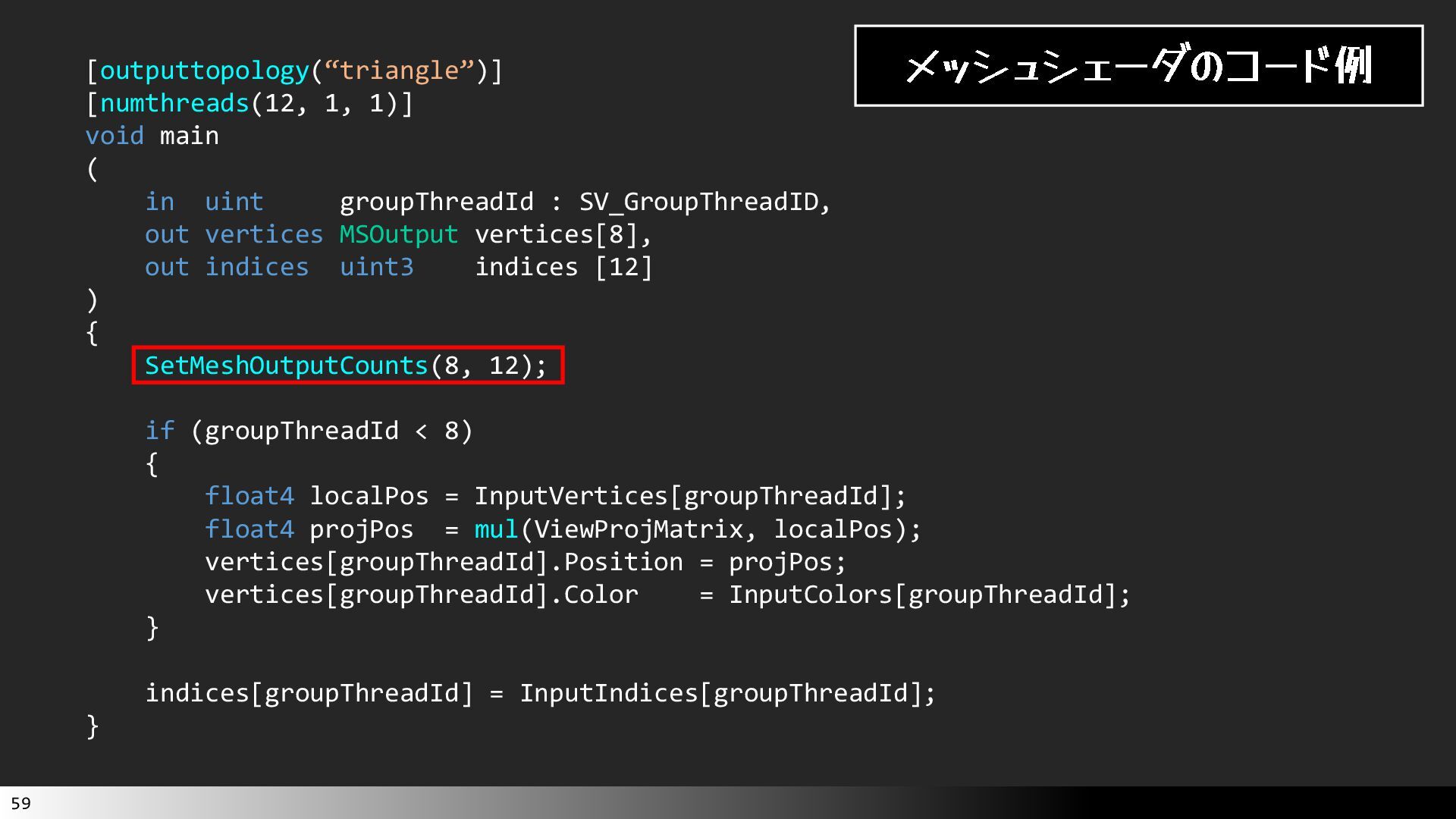
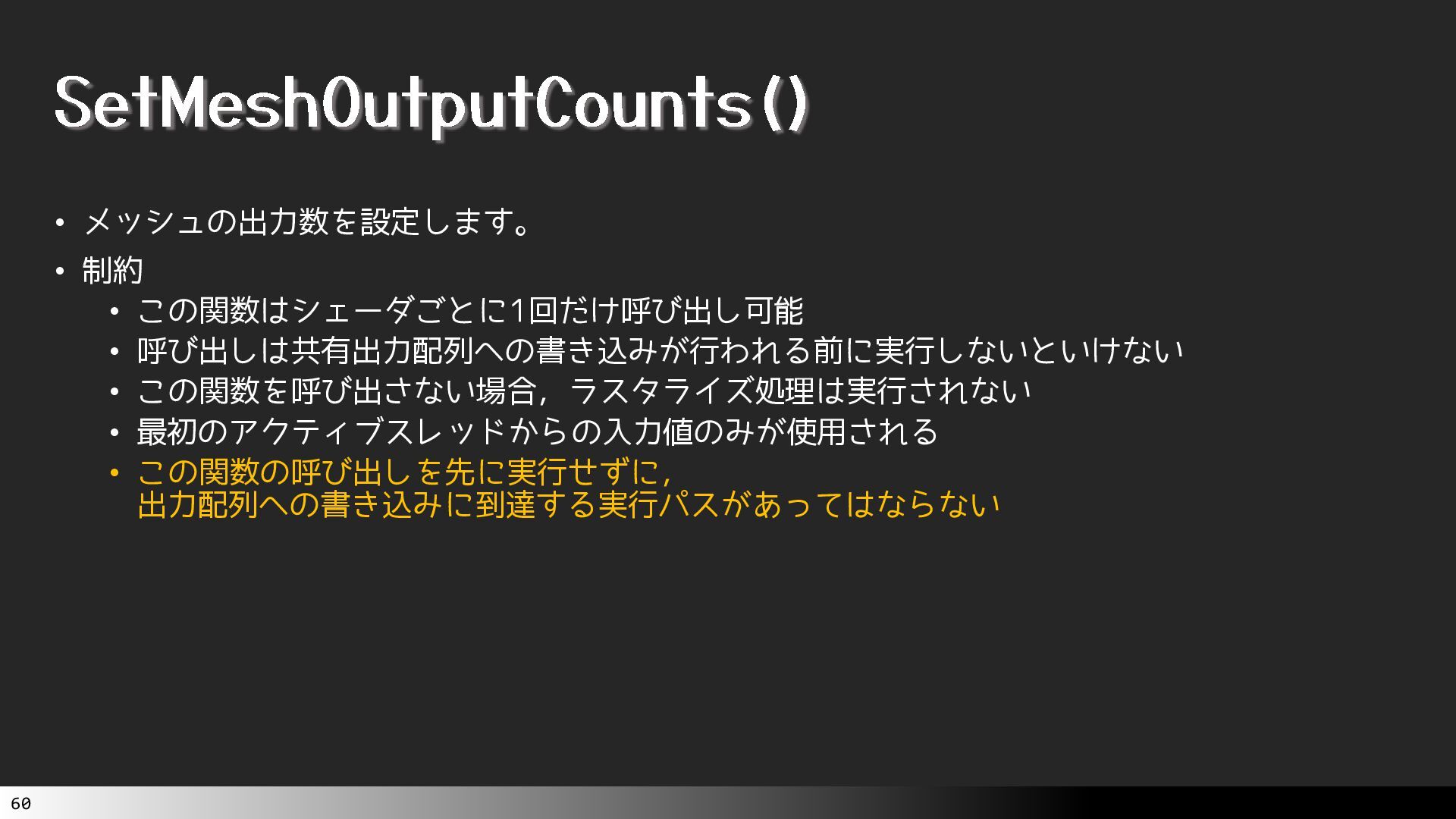
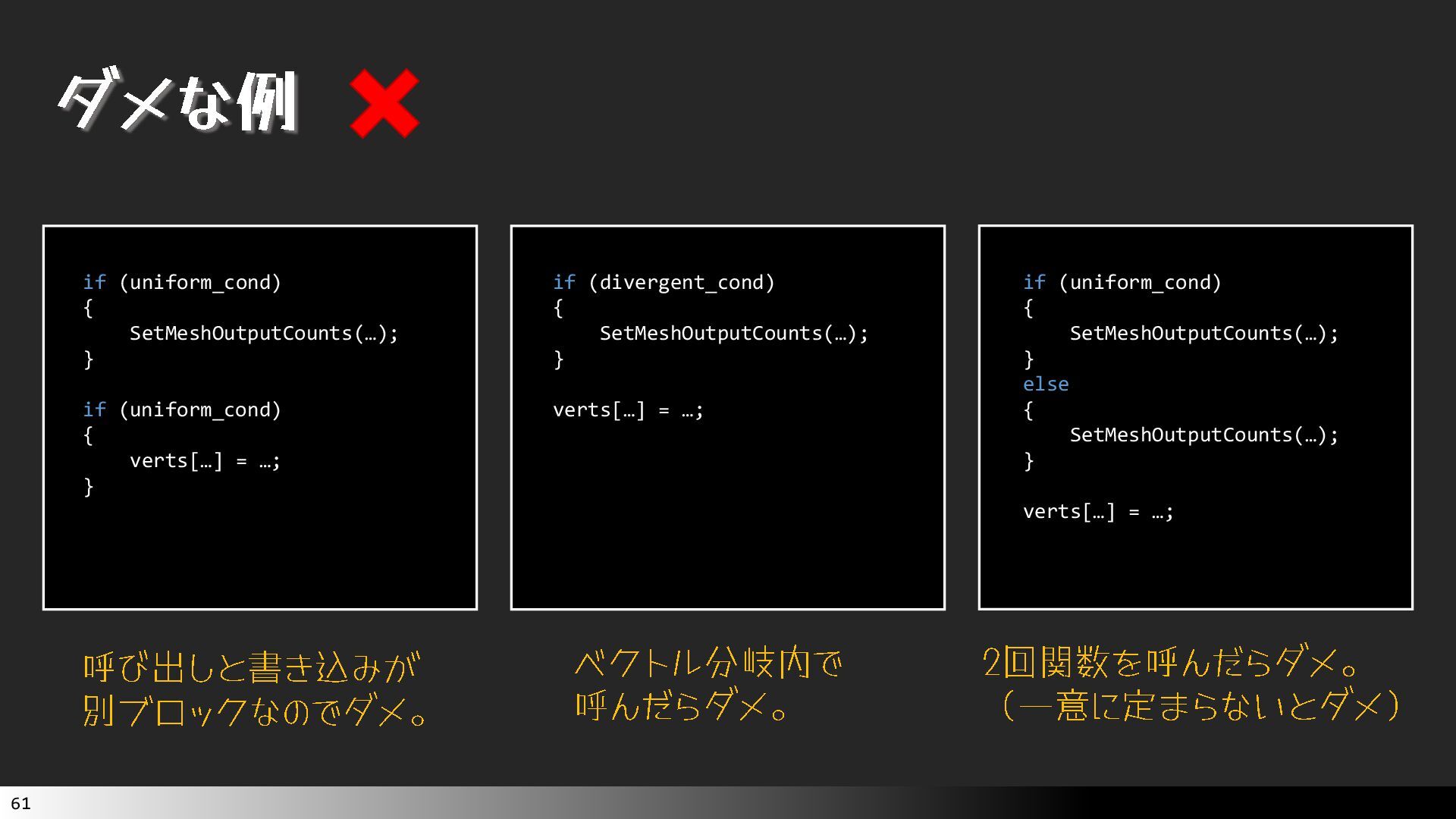
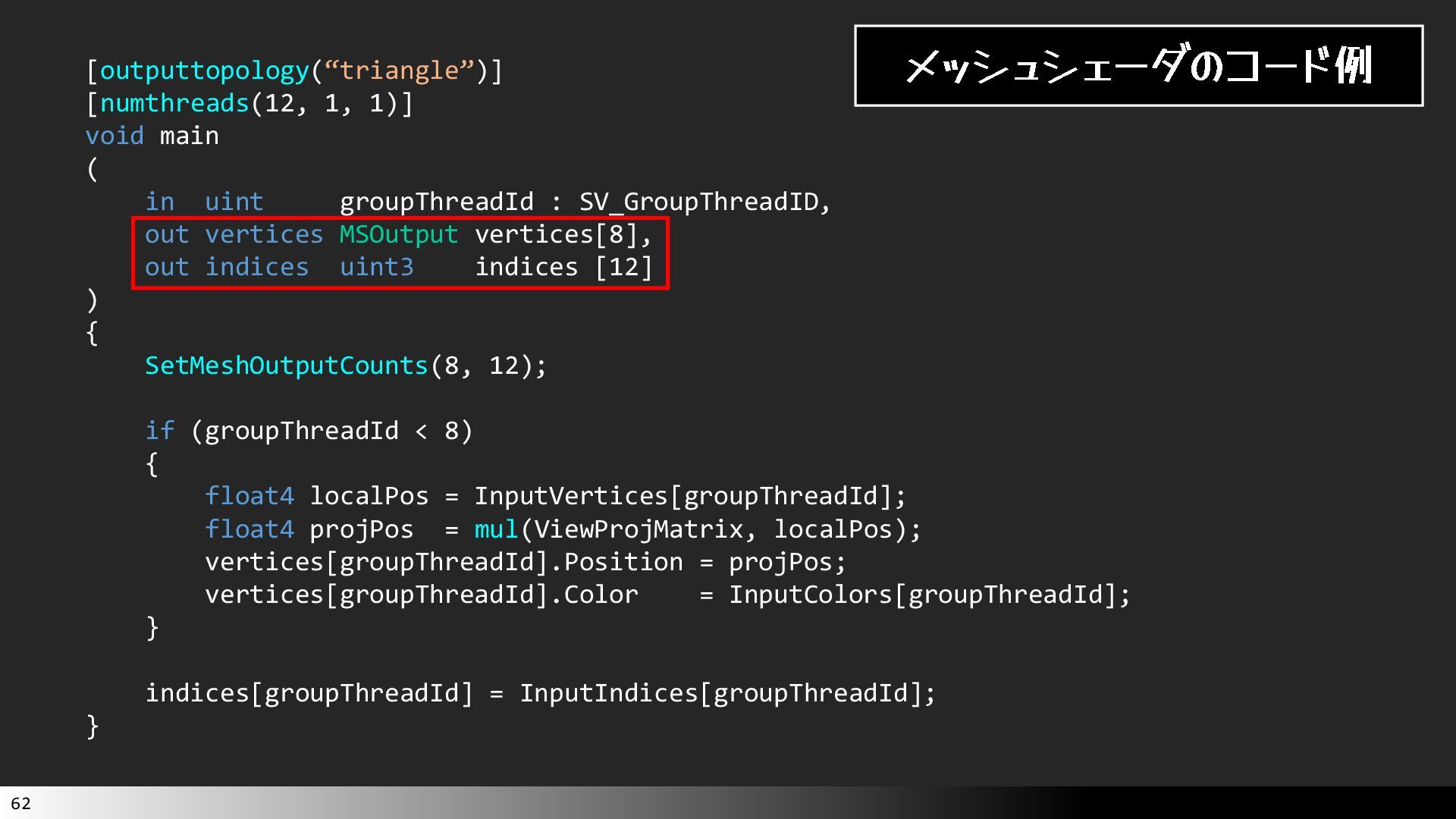
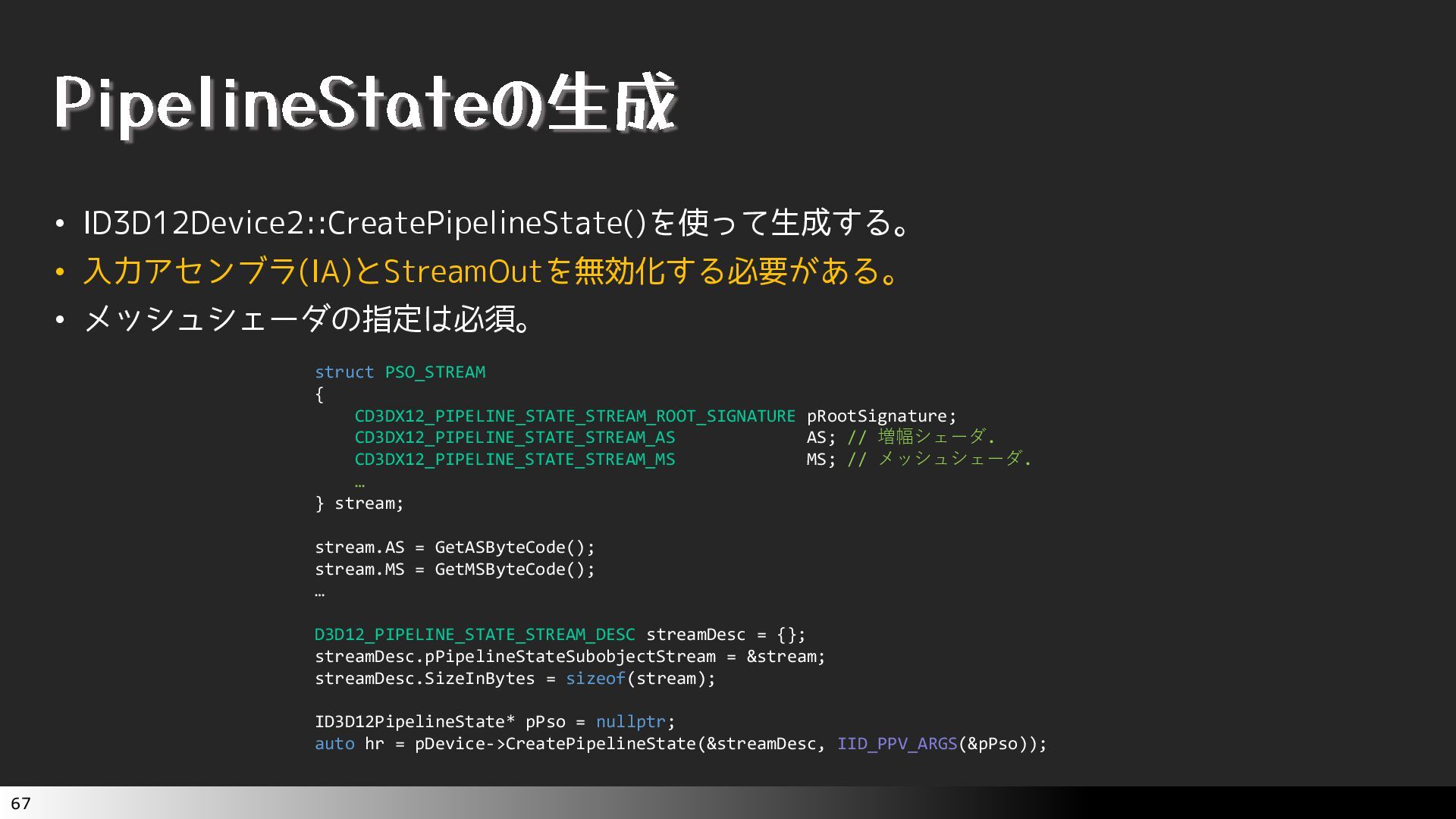
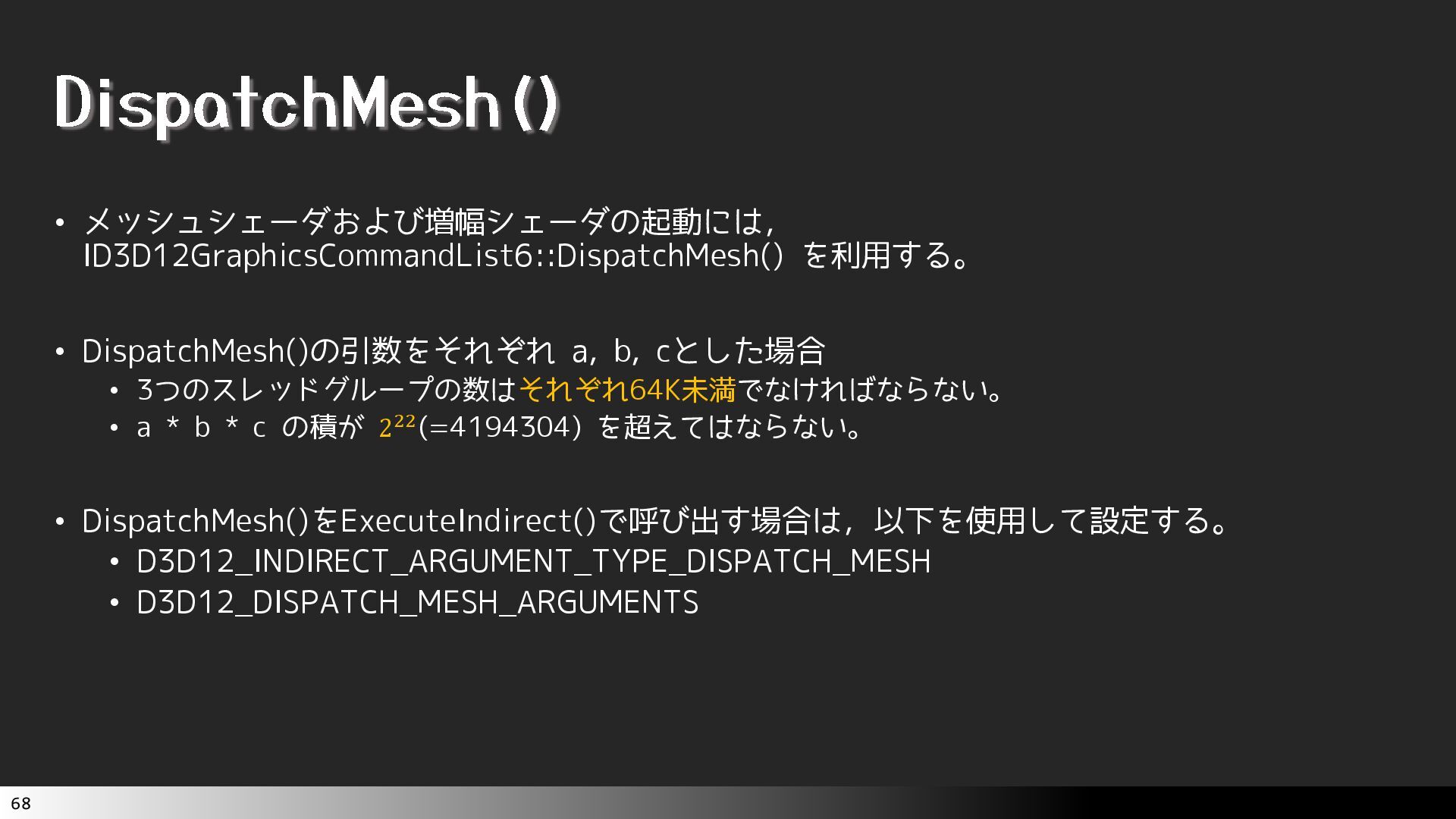
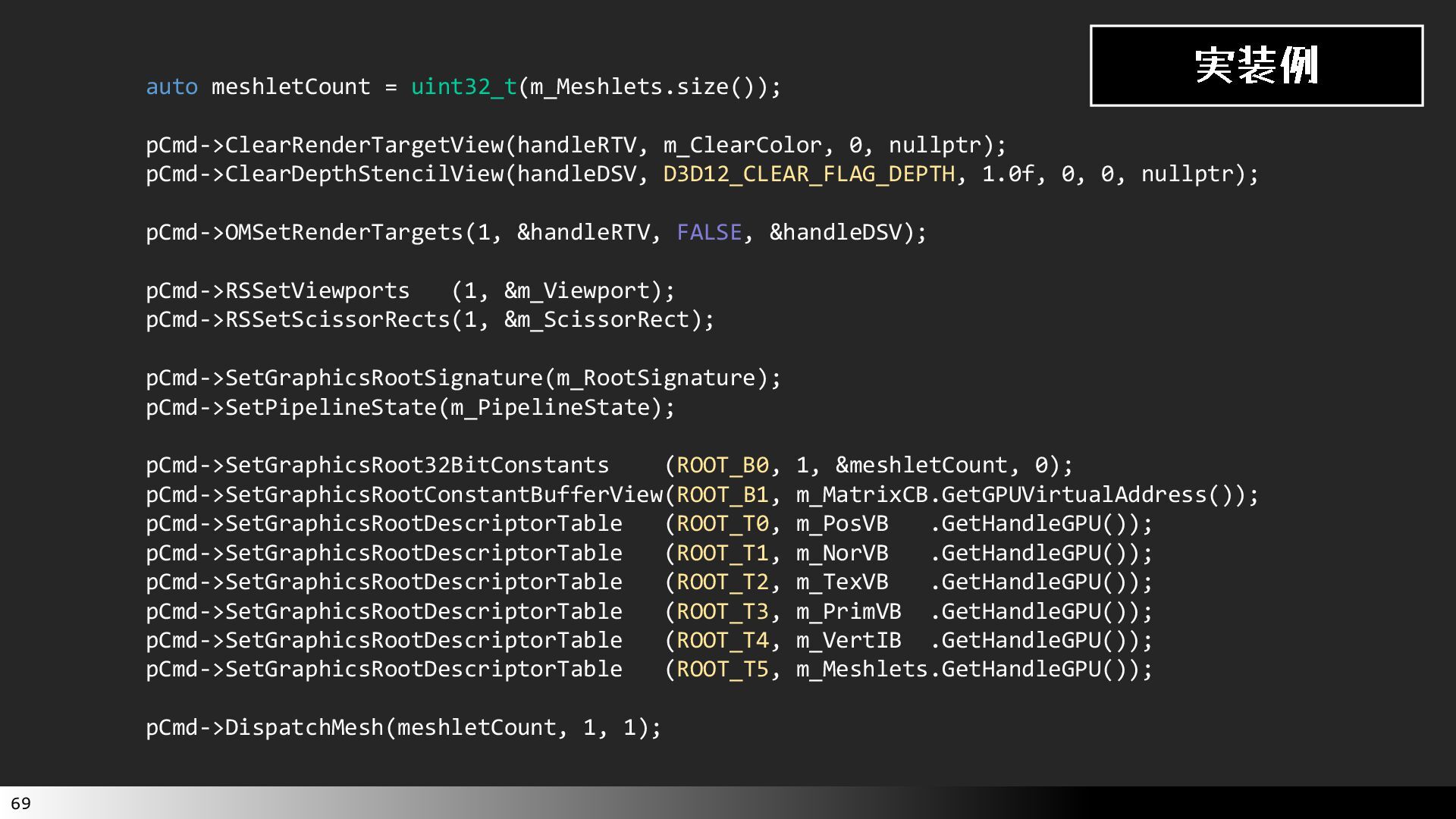
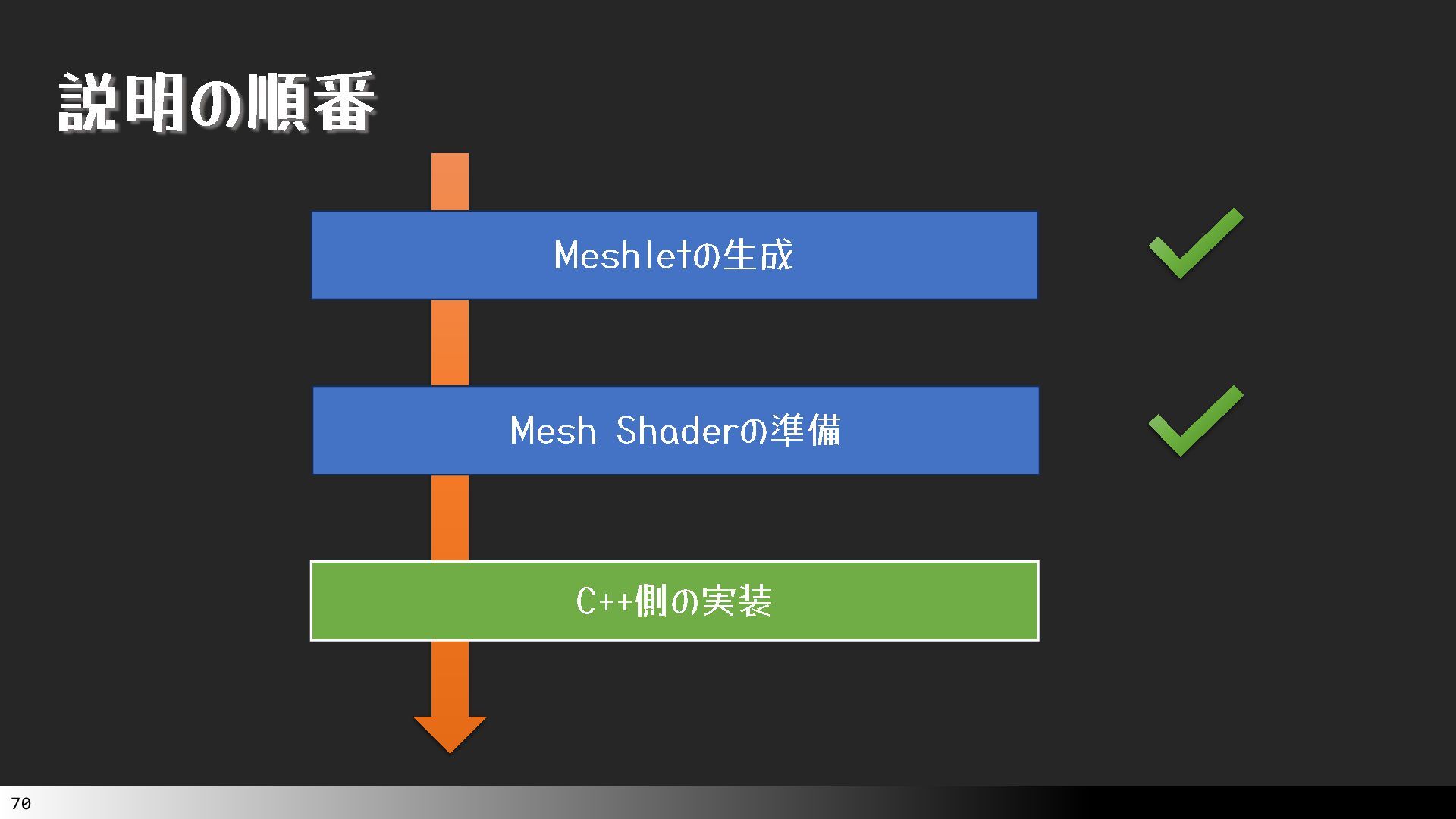
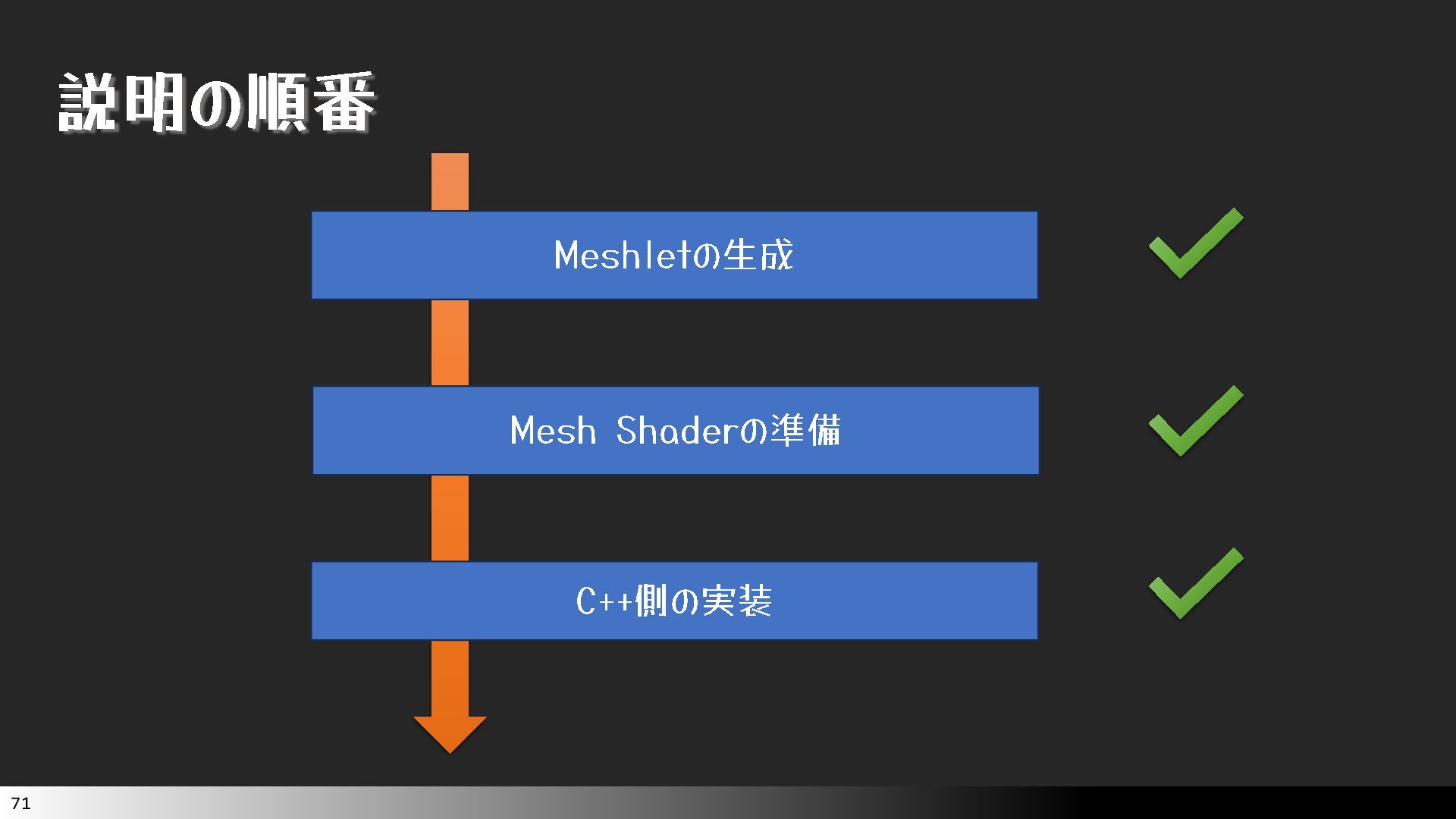
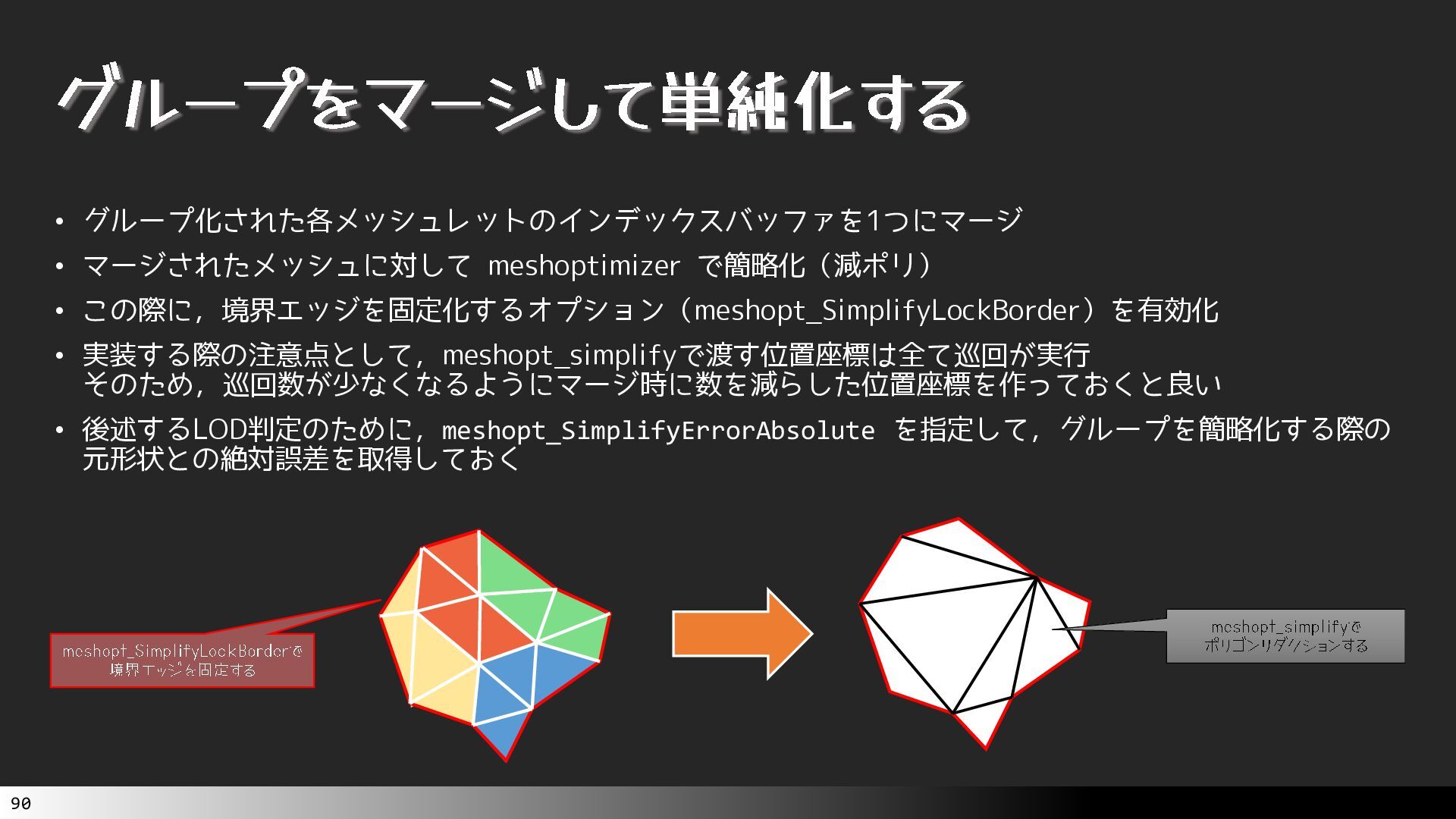
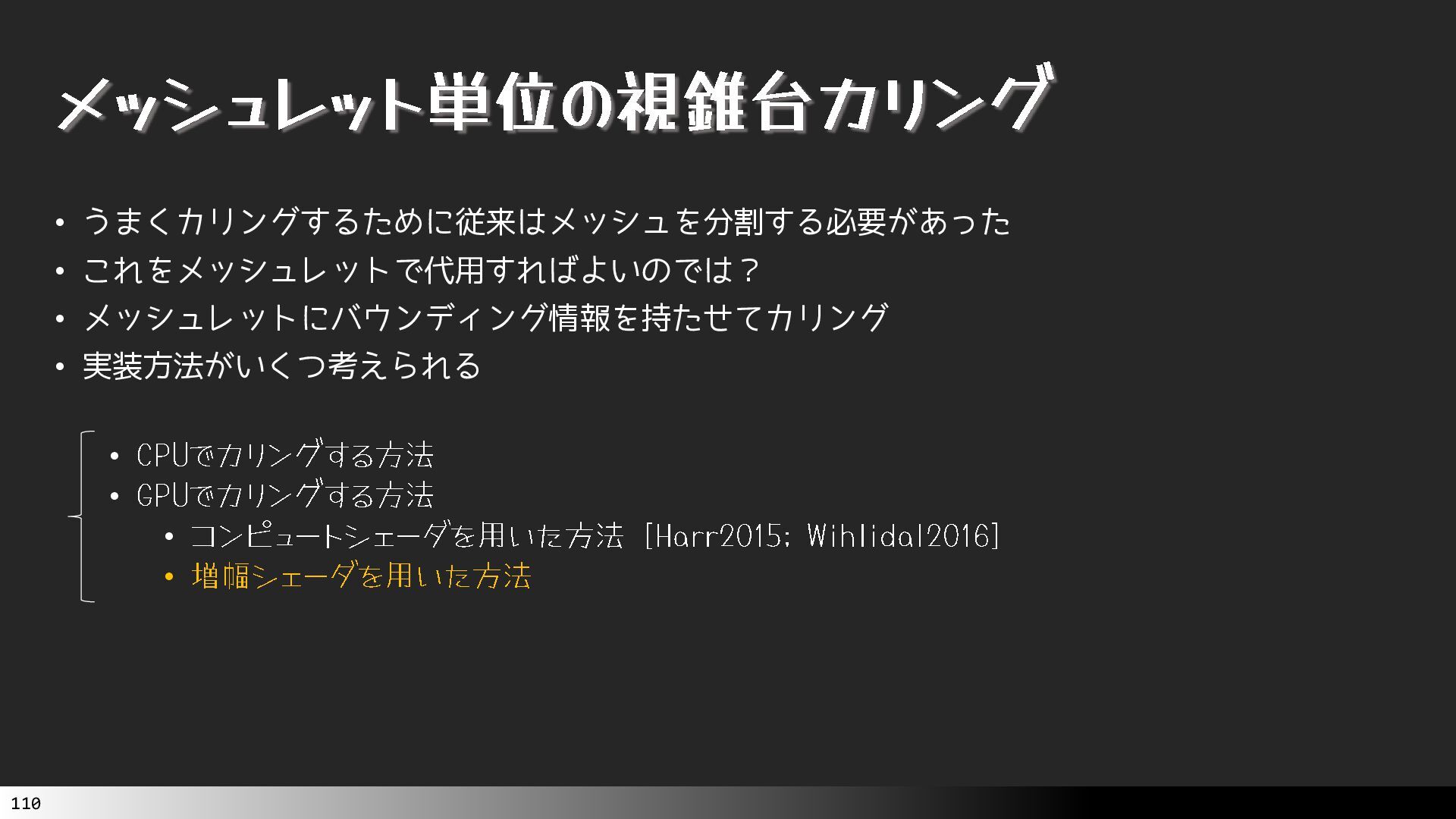
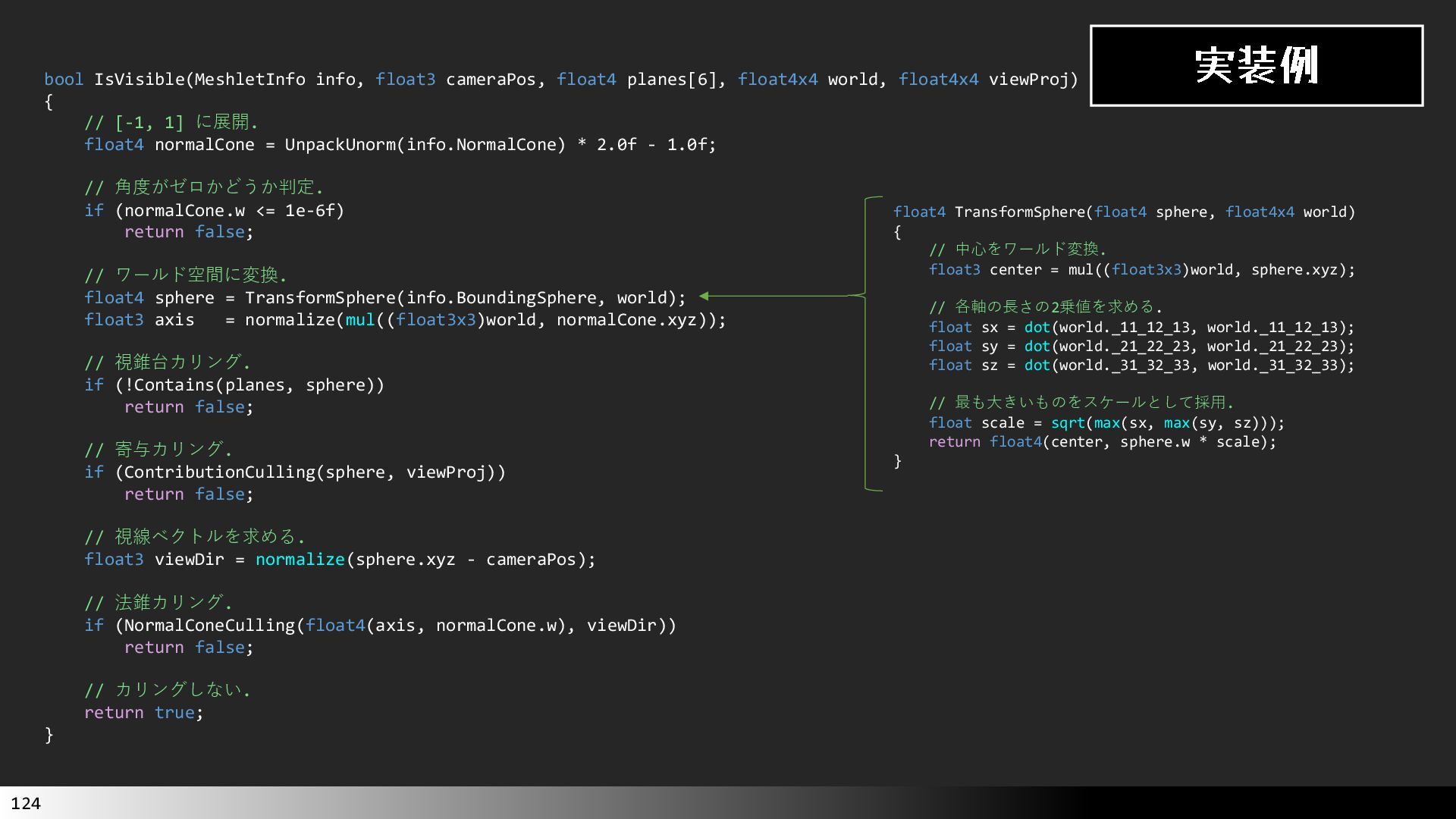
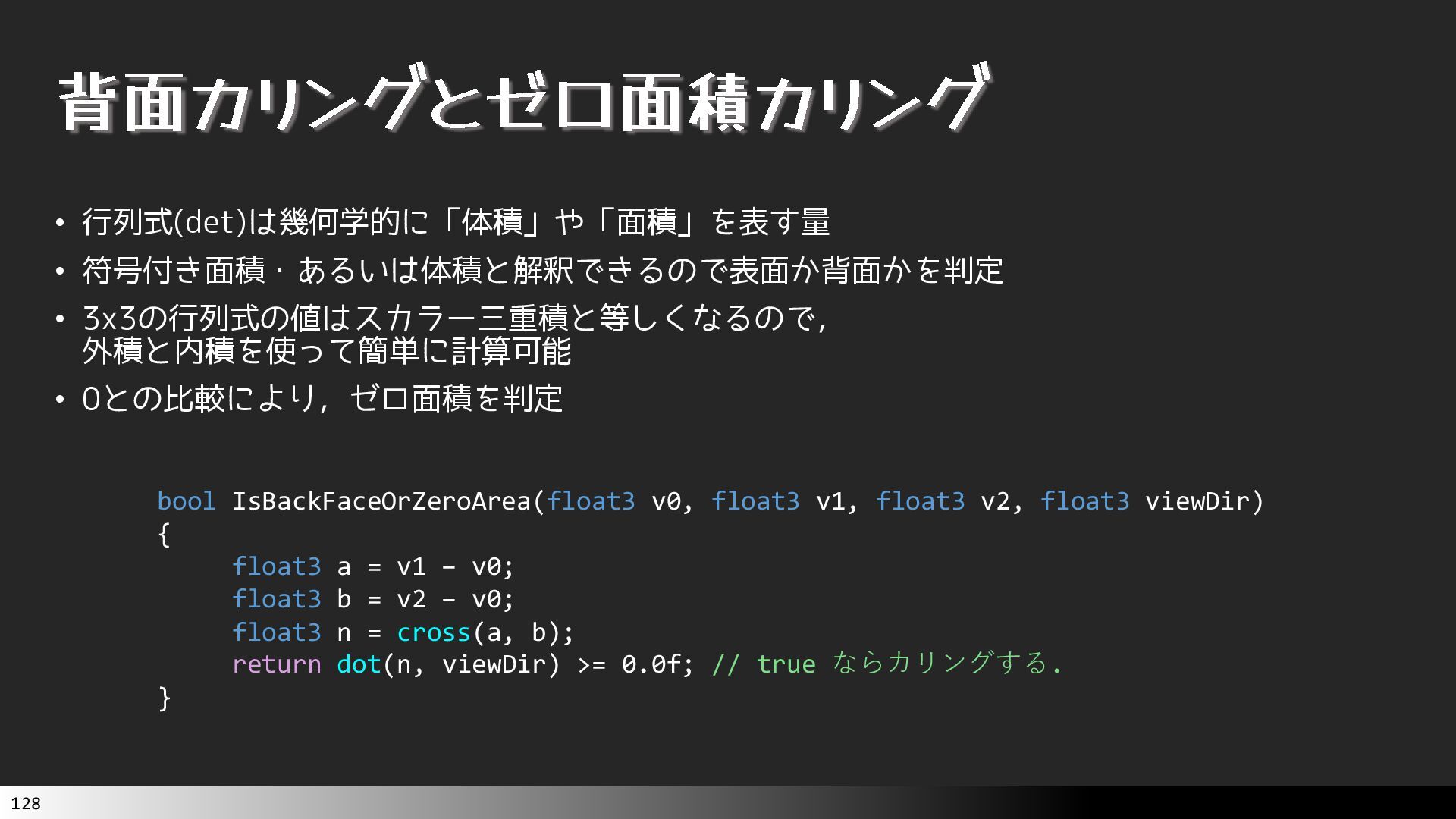
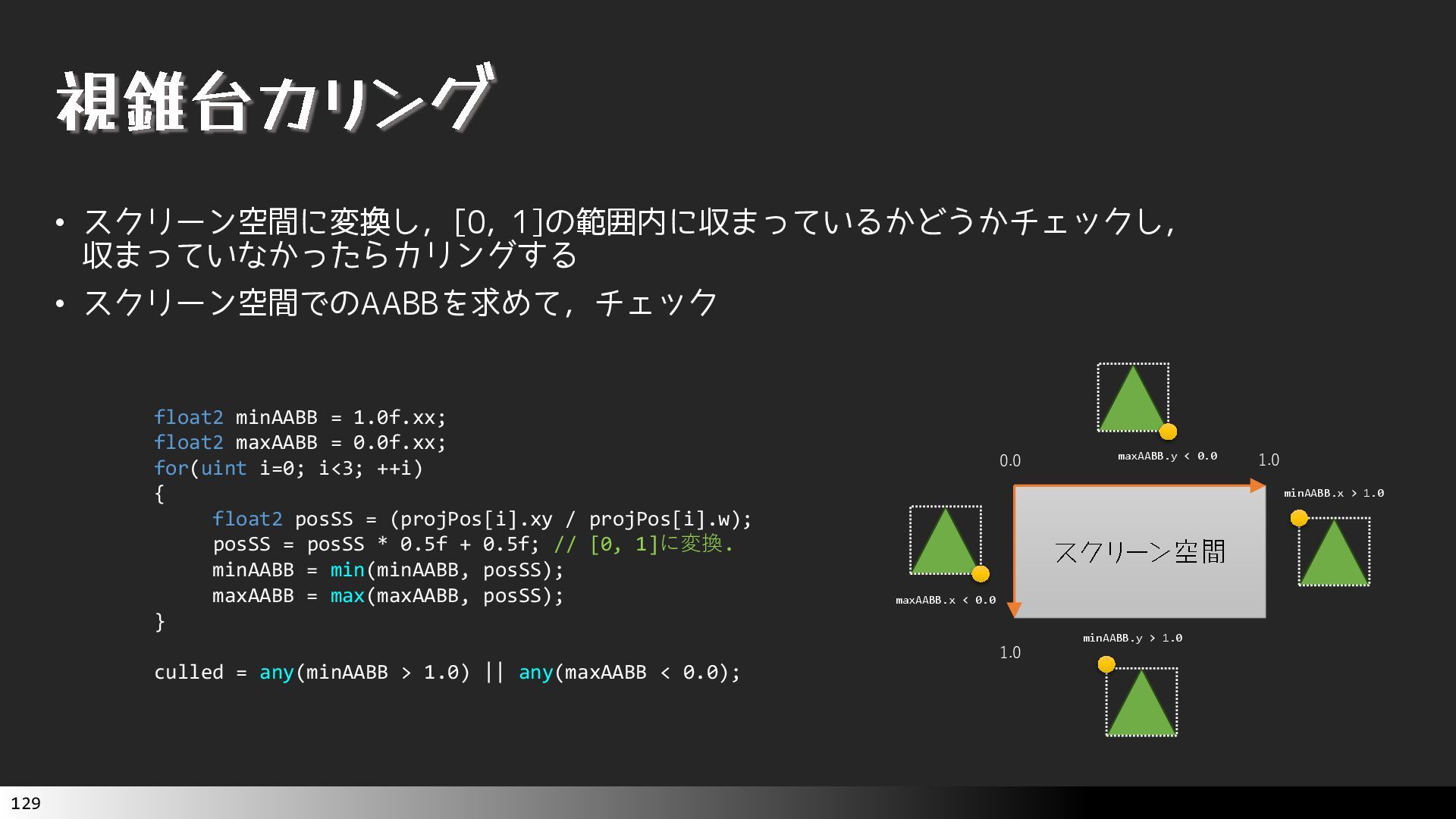
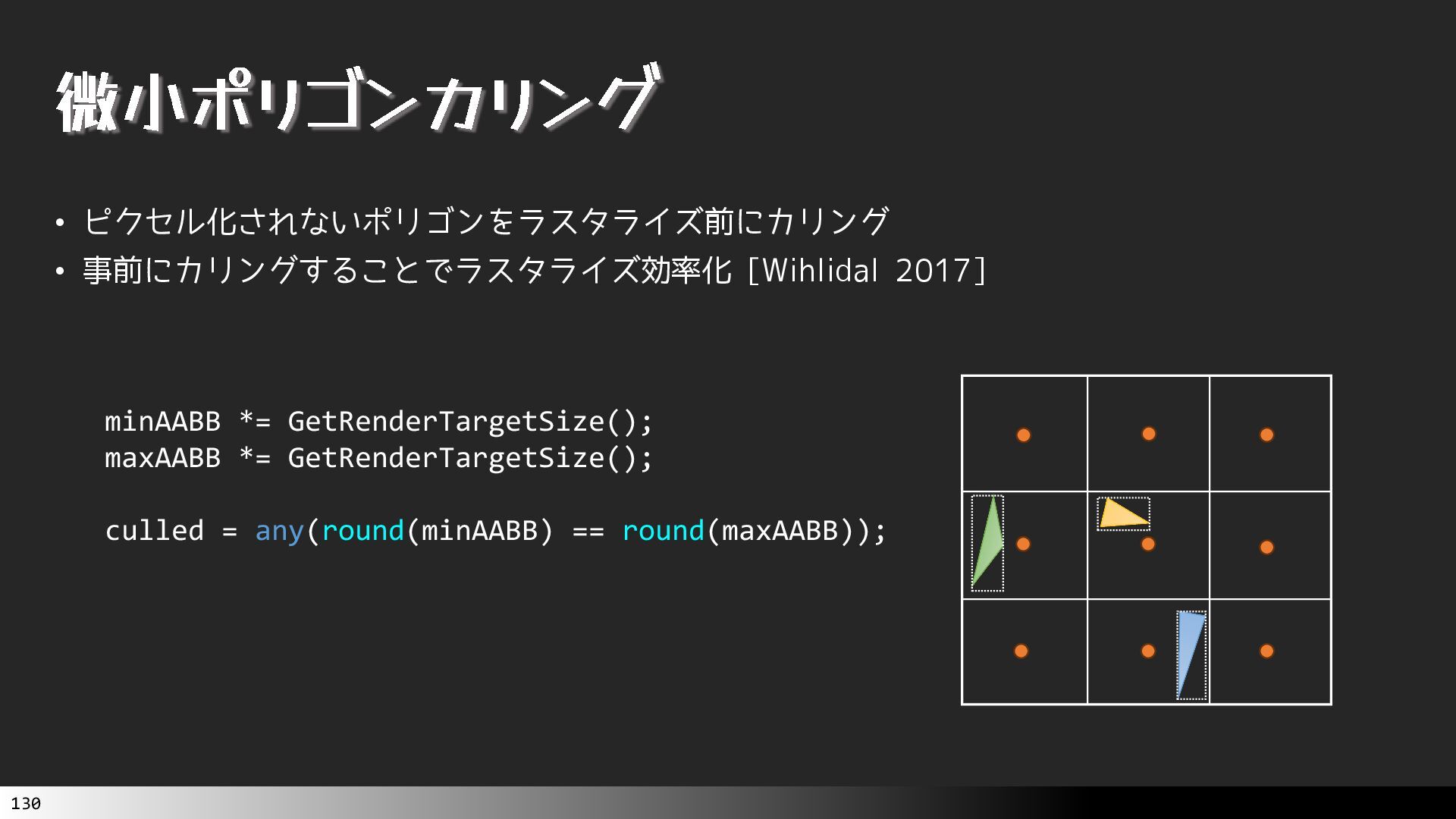
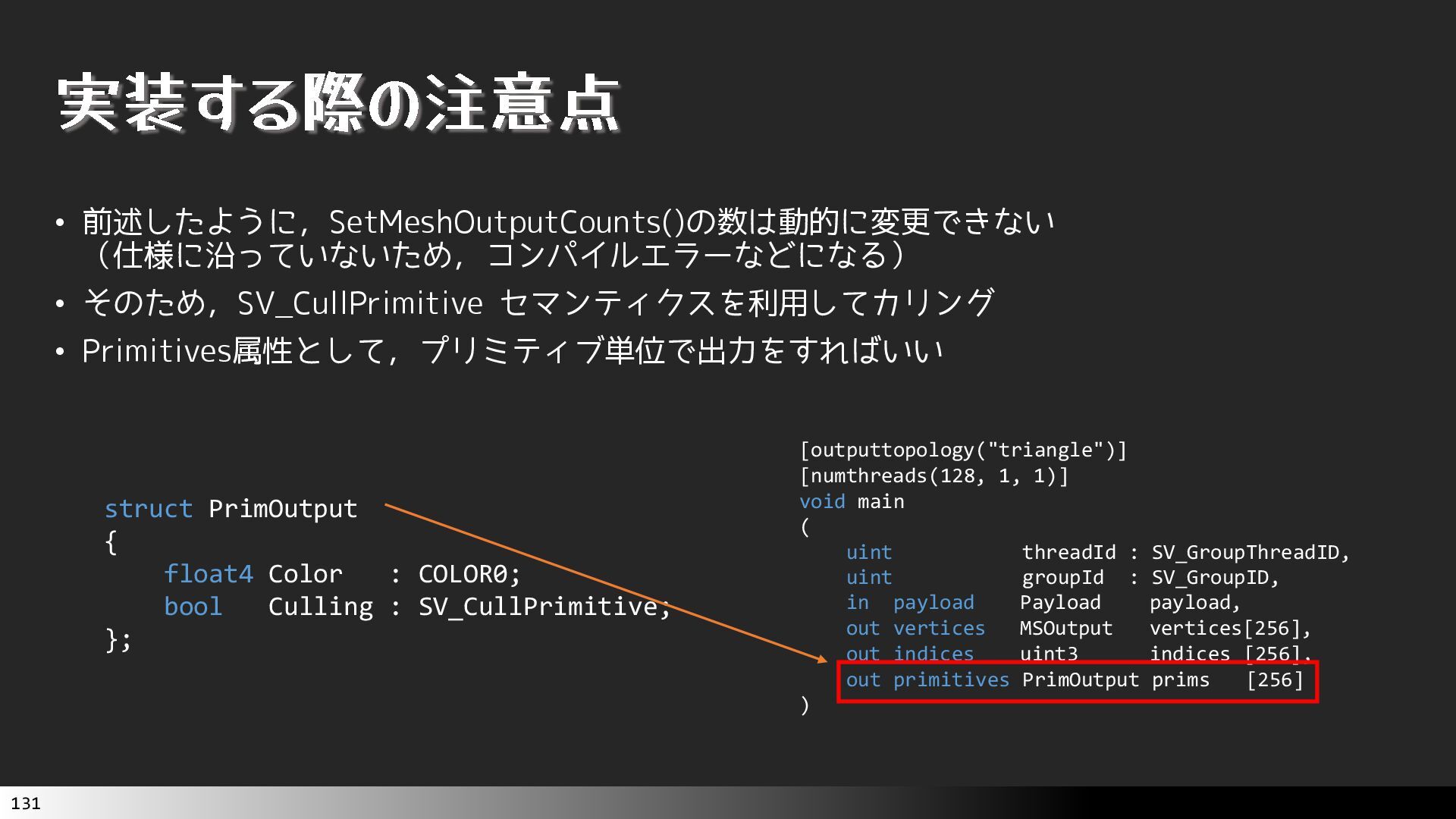
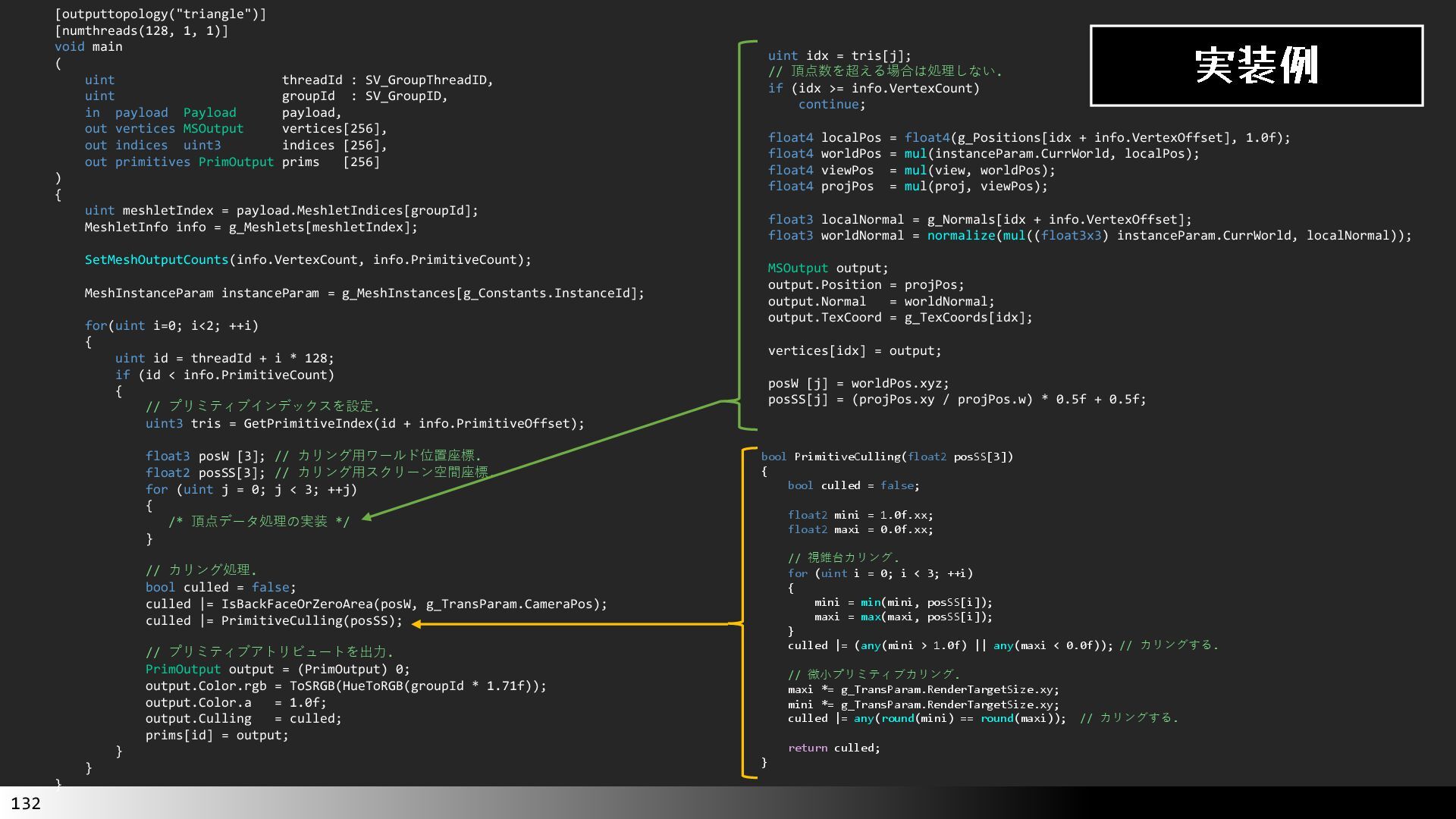
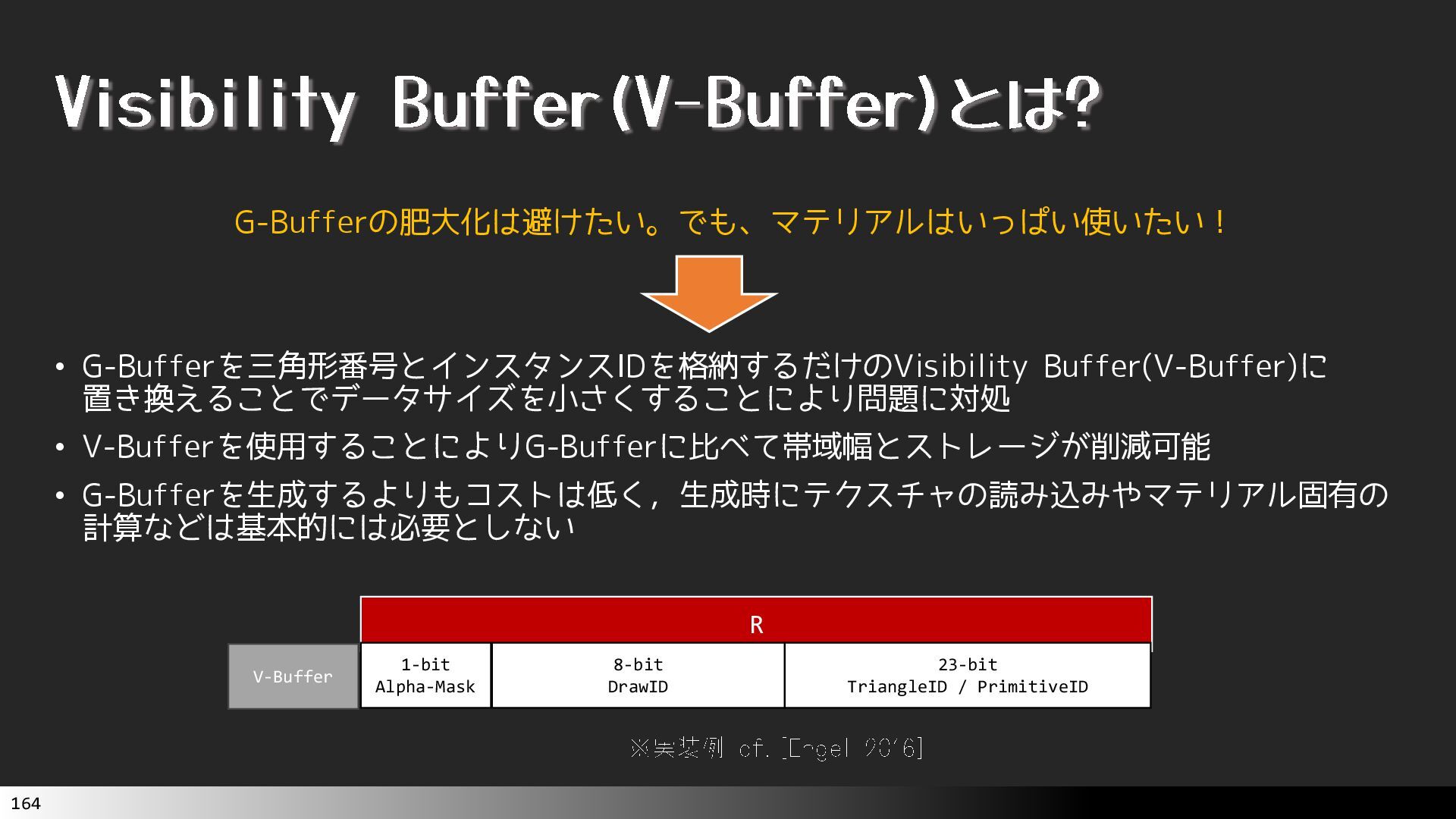
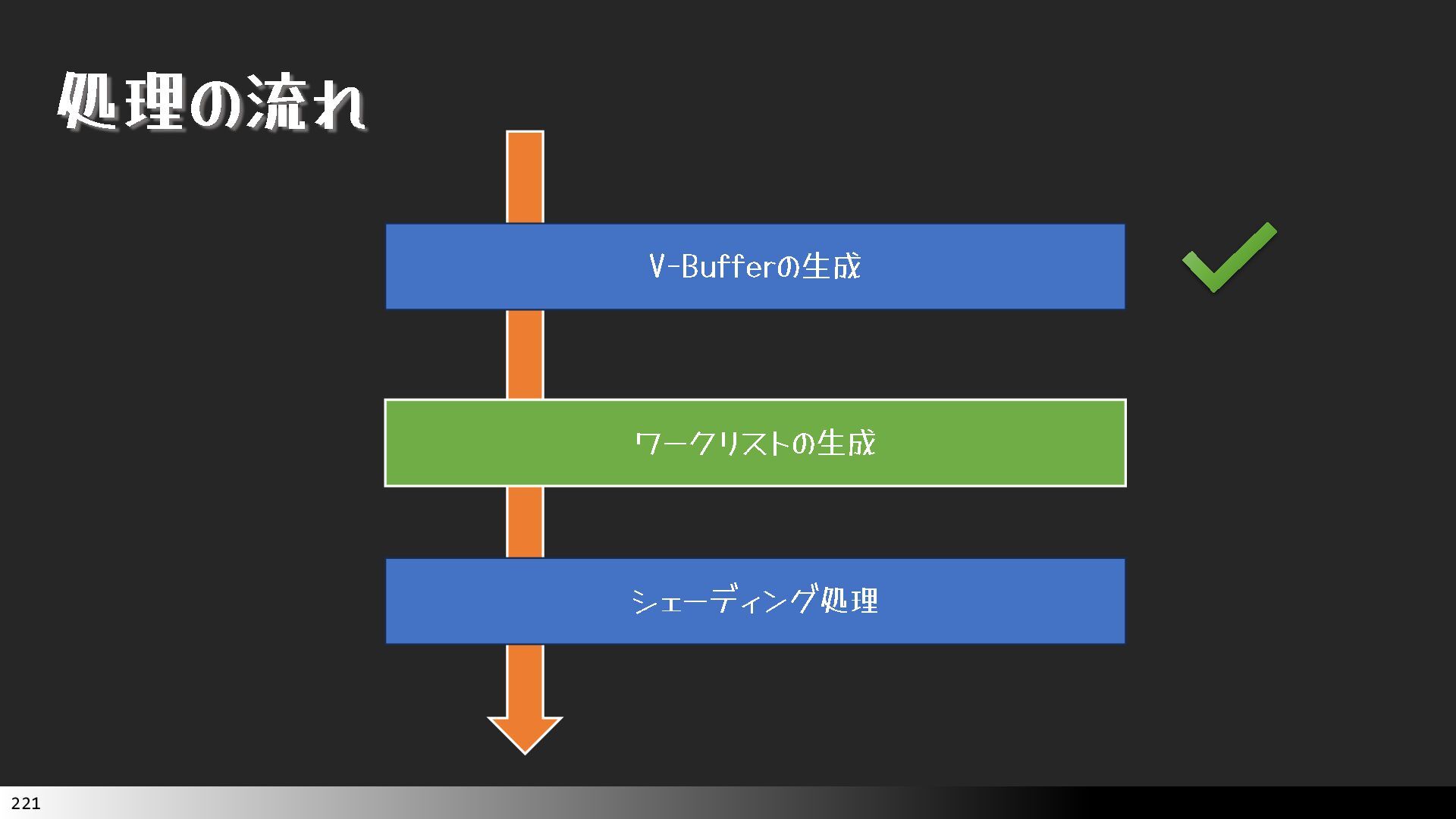
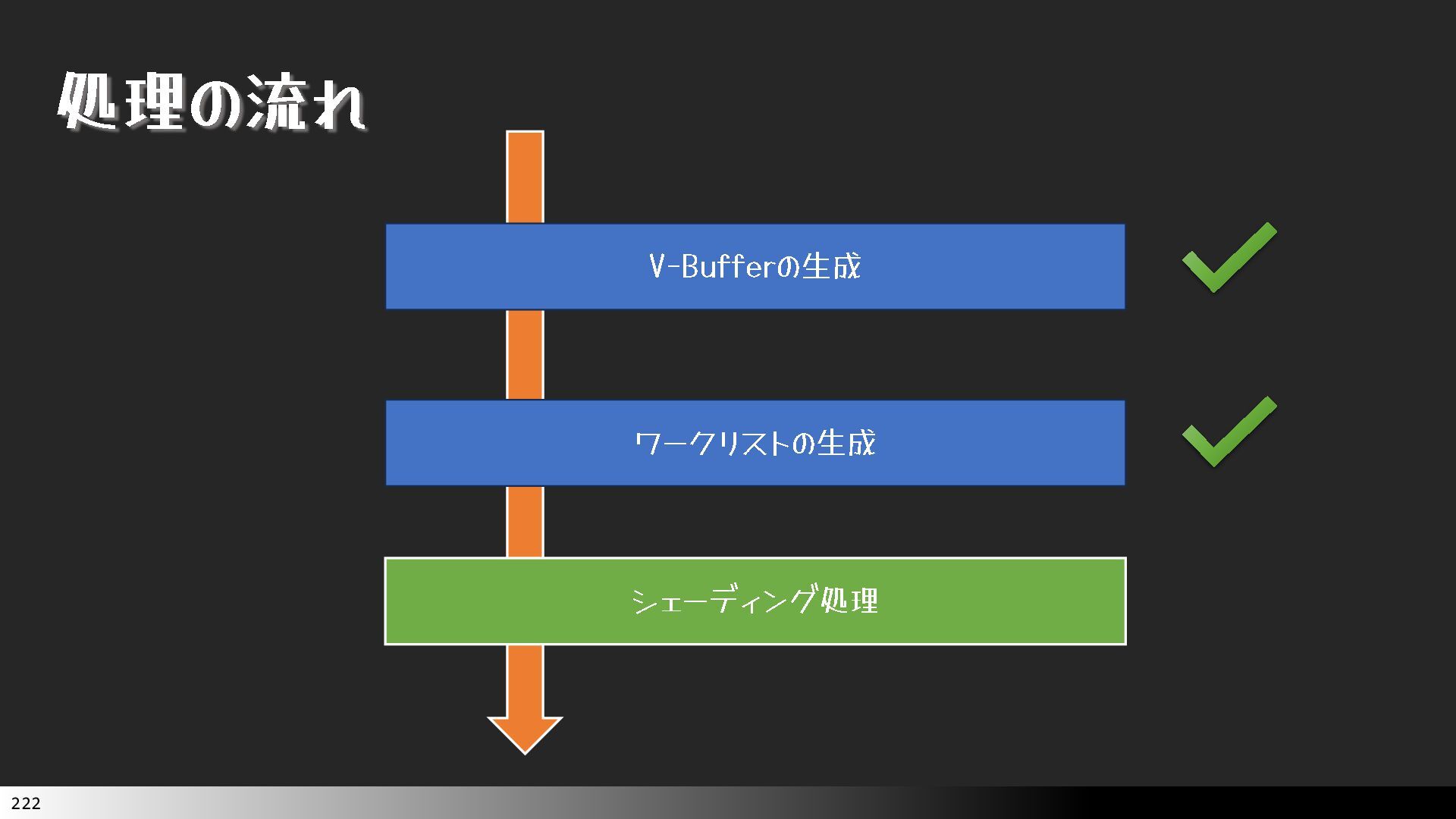
中級グラフィックス入門~効率的なメッシュレット描画~
一般公開バージョン 1.2
Pocol
July 22, 2025
More Decks by Pocol
See All by Pocol
最新のDirectX12で使えるレイトレ周りの機能追加について
projectasura
0
900
Hardware-Raytracingを用いたフォトンマッピングの実装について
projectasura
1
960
ReSTIRについて
projectasura
8
3.7k
初心者向けシェーダ講習会 第2回
projectasura
0
510
初心者向けシェーダ講習会 第1回
projectasura
0
730
中級グラフィックス入門~色彩工学編~
projectasura
21
12k
中級グラフィックス入門 ~シャドウマッピング総まとめ~
projectasura
5
5.1k
Other Decks in Programming
See All in Programming
jsmini JavaScript Engine を作ってみた話
yosuke_furukawa
PRO
0
250
PHP初心者セッション2026 〜生成AIでは見えない裏側を知る:今だからLAMPを通して仕組みを学ぶ〜
kashioka
0
720
変わらないものが、変わるものを決める — 意図駆動開発 × イベントソーシング × イミュータブル | What Doesn't Change Decides What Can — IDD × Event Sourcing × Immutability
tomohisa
0
640
ソフトウェア設計に溶けるインフラ ― AWS CDK のインフラ認識論
konokenj
3
680
Google Apps Script で Ruby を動かす
kawahara
0
110
Laravel Boostに学ぶ、AIにPHPを書かせる技術 〜OSSの実装から蒸留するエージェント制御の王道〜
kentaroutakeda
3
550
為什麼你並不需要ViewModel / No, you don't need a ViewModel
lovee
1
440
【やさしく解説 設計編・中級 #6】良いアーキテクチャとは ~ 一本の登り道の、行き先 ~
panda728
PRO
0
190
TSX の <Hoge<Fuga>> という構文に驚いた話 / tsx-type-argument-syntax
kanaru0928
0
110
【やさしく解説 設計編・中級 #4】ルールの寿命と、システムの年輪
panda728
PRO
2
170
Apache Hive: Toward a Cloud Native Lakehouse
okumin
0
170
Terraform標準の組織で AWS CDKをどう使うか
mu7889yoon
1
410
Featured
See All Featured
Heart Work Chapter 1 - Part 1
lfama
PRO
8
36k
Principles of Awesome APIs and How to Build Them.
keavy
128
18k
The Cult of Friendly URLs
andyhume
79
7k
Marketing to machines
jonoalderson
1
5.6k
Have SEOs Ruined the Internet? - User Awareness of SEO in 2025
akashhashmi
0
400
How STYLIGHT went responsive
nonsquared
100
6.2k
Color Theory Basics | Prateek | Gurzu
gurzu
0
400
Why Our Code Smells
bkeepers
PRO
340
58k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2.1k
The Limits of Empathy - UXLibs8
cassininazir
1
560
Taking LLMs out of the black box: A practical guide to human-in-the-loop distillation
inesmontani
PRO
3
2.3k
The Curious Case for Waylosing
cassininazir
1
440
Transcript
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
None
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}