This presentation is among the Top 27 Best Papers/Practice/Tutorials selected, out of 460+ submissions received, to be presented @STC 2012.
Presentation Abstract
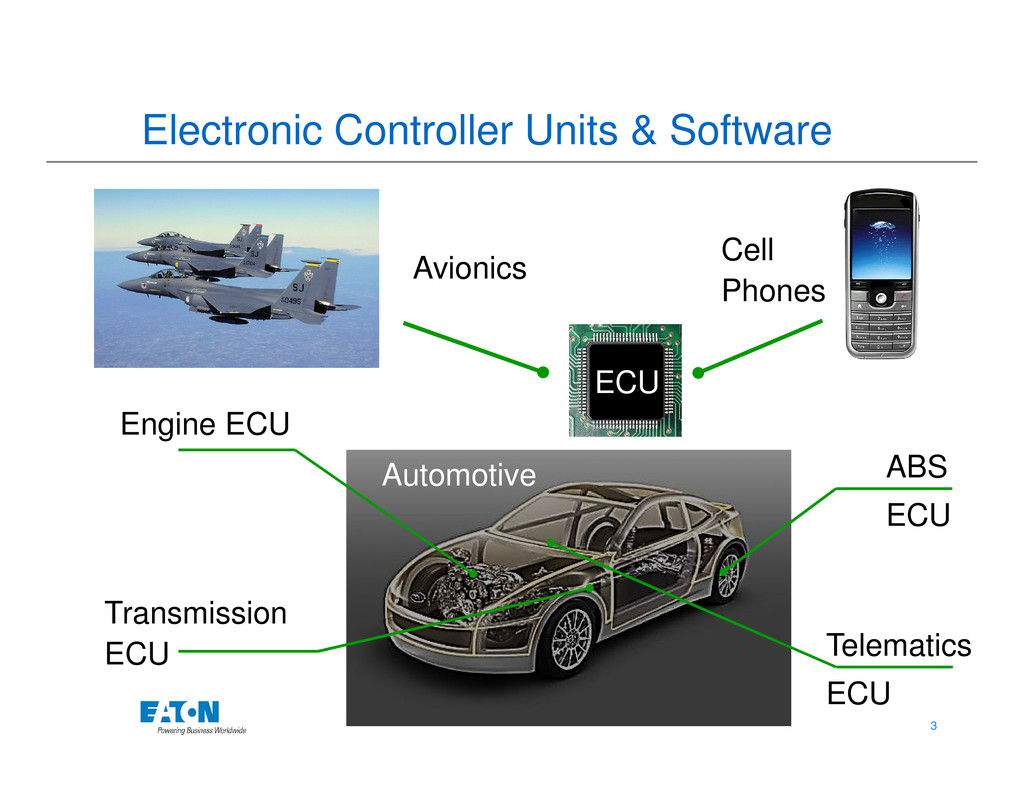
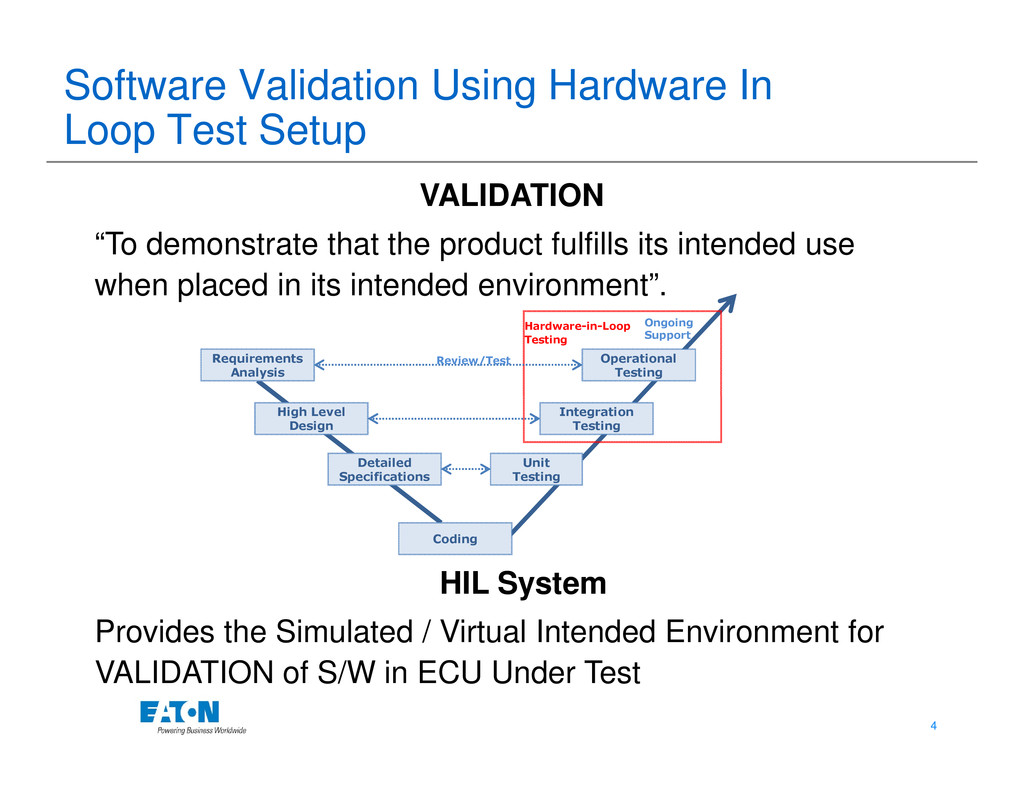
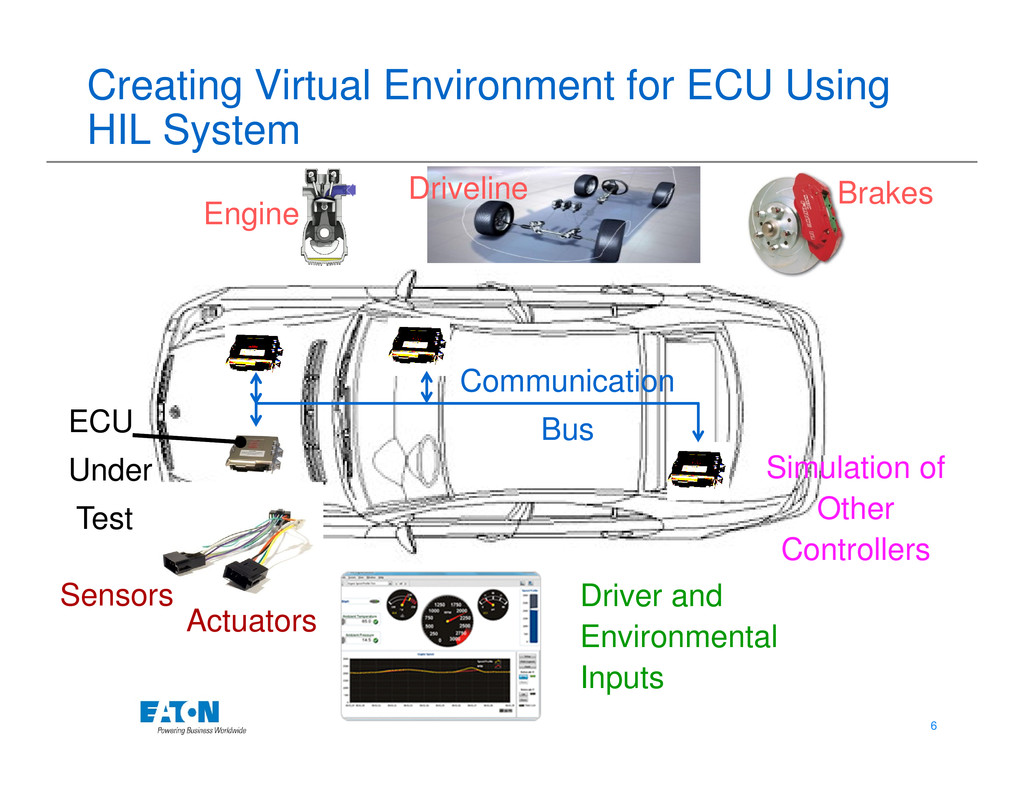
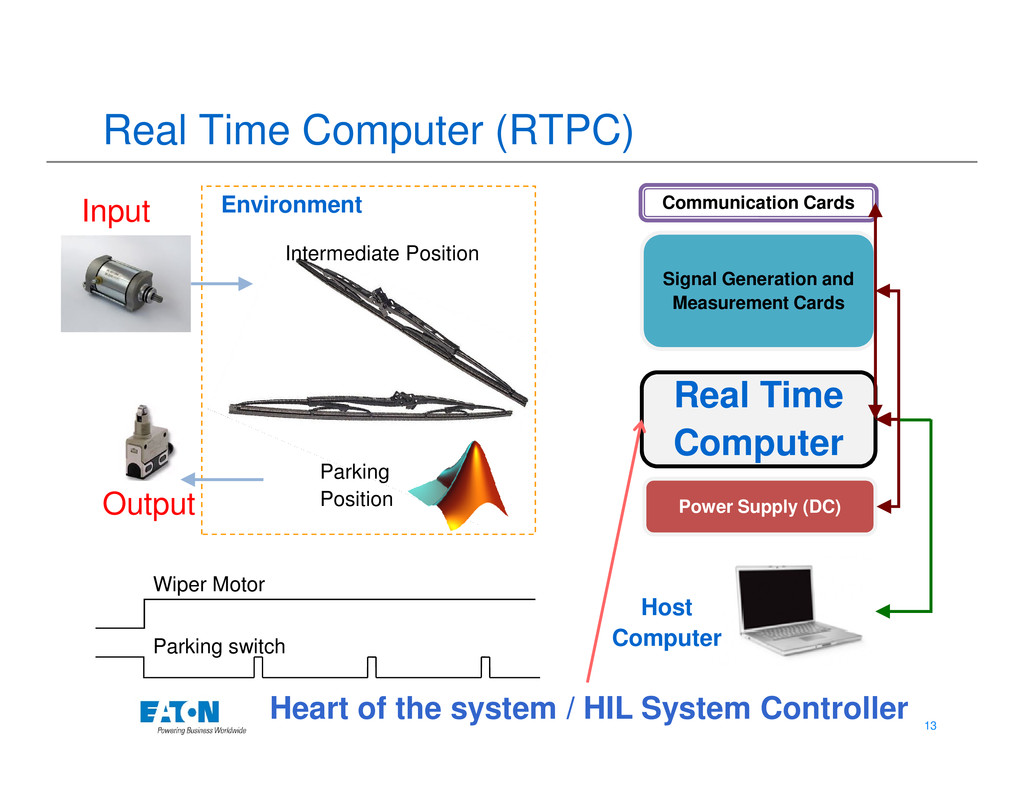
Hardware-In-loop simulation (HILS) has become an integral part of software development process used in the embedded system. The HIL Test Setup is extensively used for testing control algorithms implemented in the ECU Application Software. HIL simulation involves operating mechatronic systems particularly electronic control units (ECUs), in a closed loop with simulated components (environment, engine, vehicle, transmission) in real time to test ECU algorithms intensively in this virtual environment.
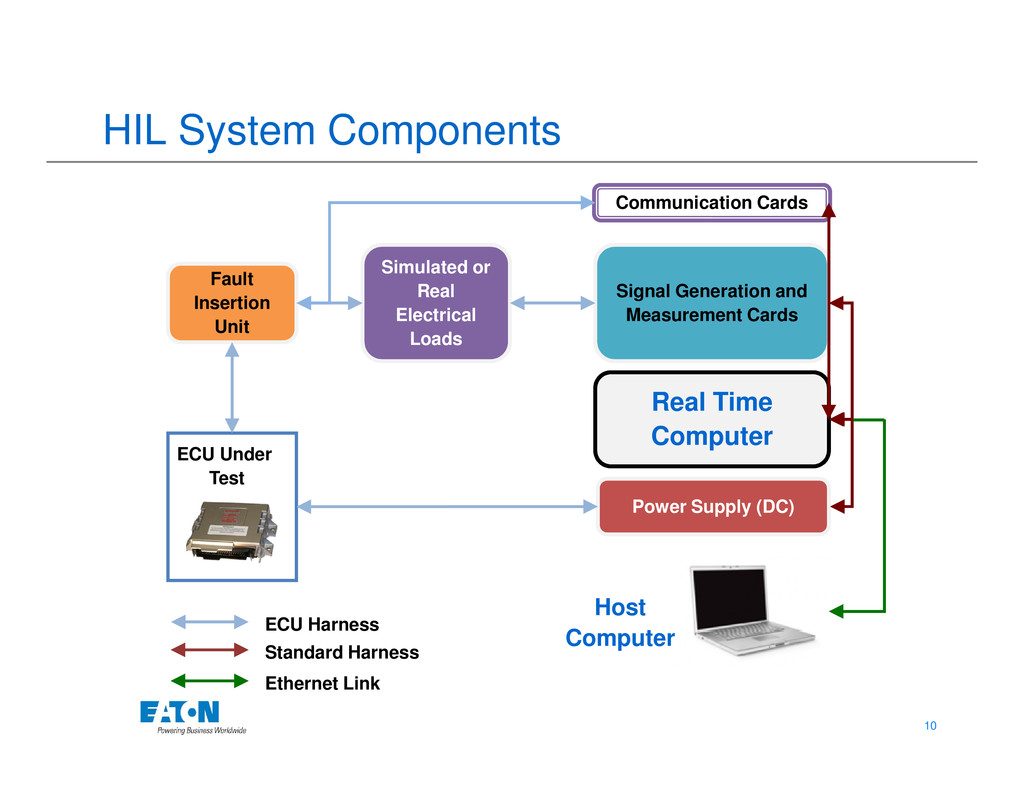
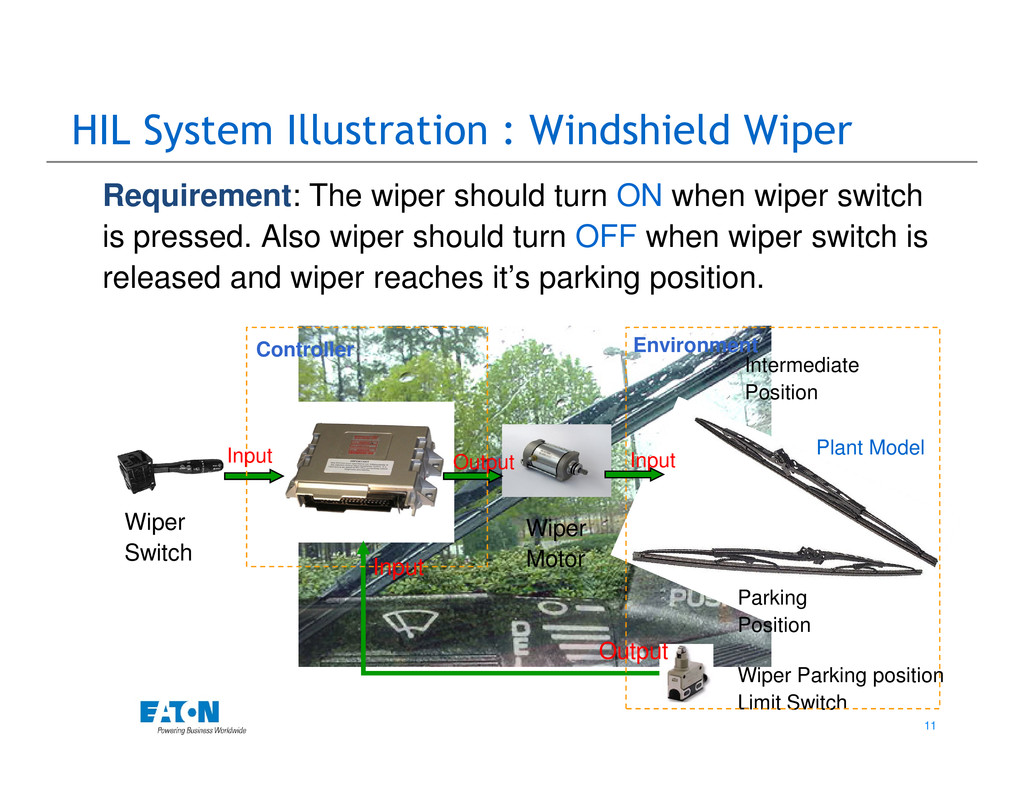
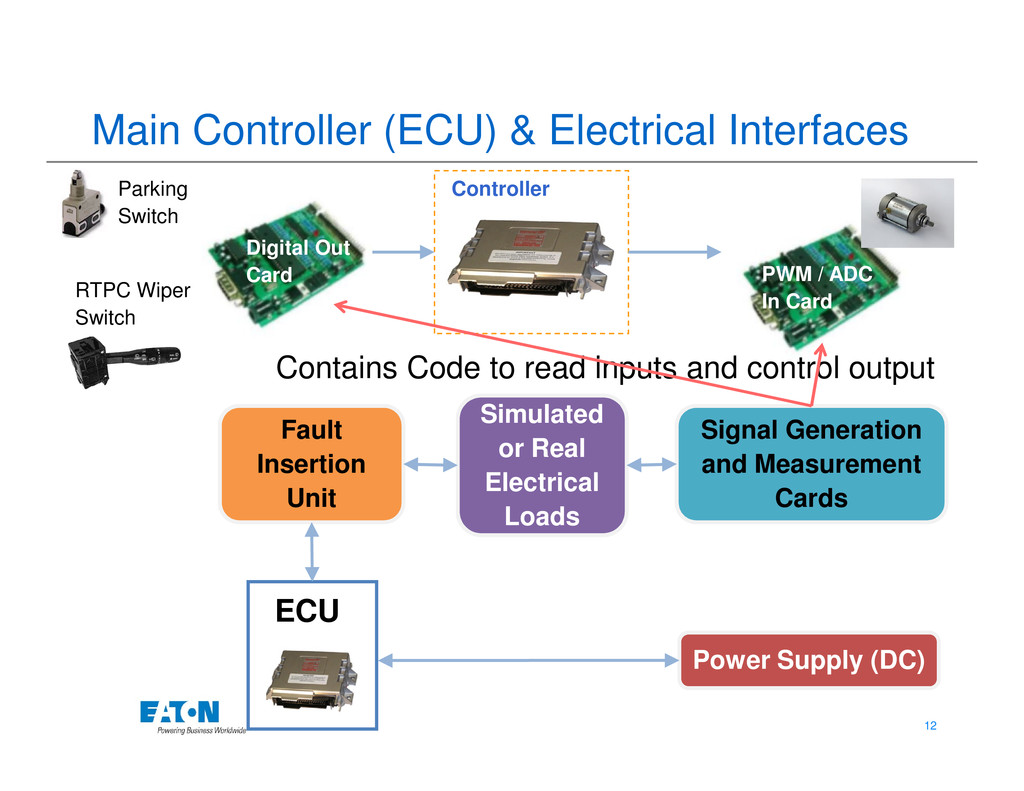
In this paper, a generic Hardware in Loop System is explained. The paper illustrates constituents of the HIL system which enable the functional and electrical diagnostic testing using the example of windshield wiper and transmission control module (TCM). The configuration and interfacing of the components used in the HIL system is also elaborated in this paper.
The accuracy of the testing results depends on how simulated components are designed compared to real world. The paper also throws light on some of the aspects of design of the simulated components like engine, transmission and vehicle.
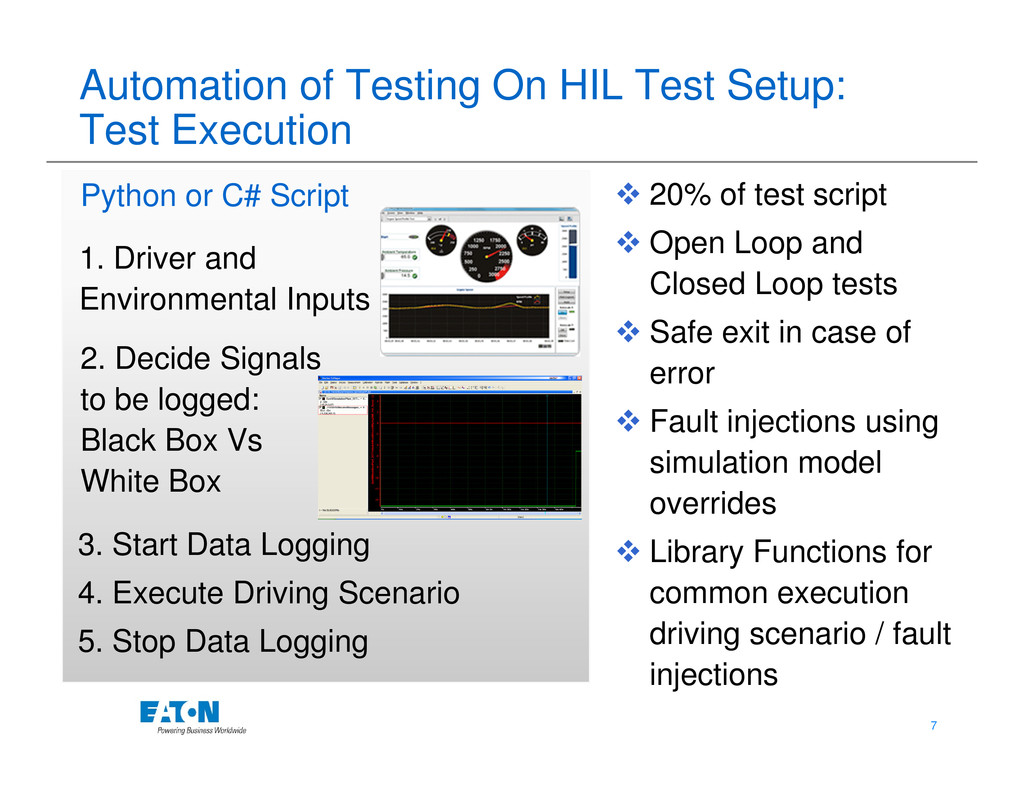
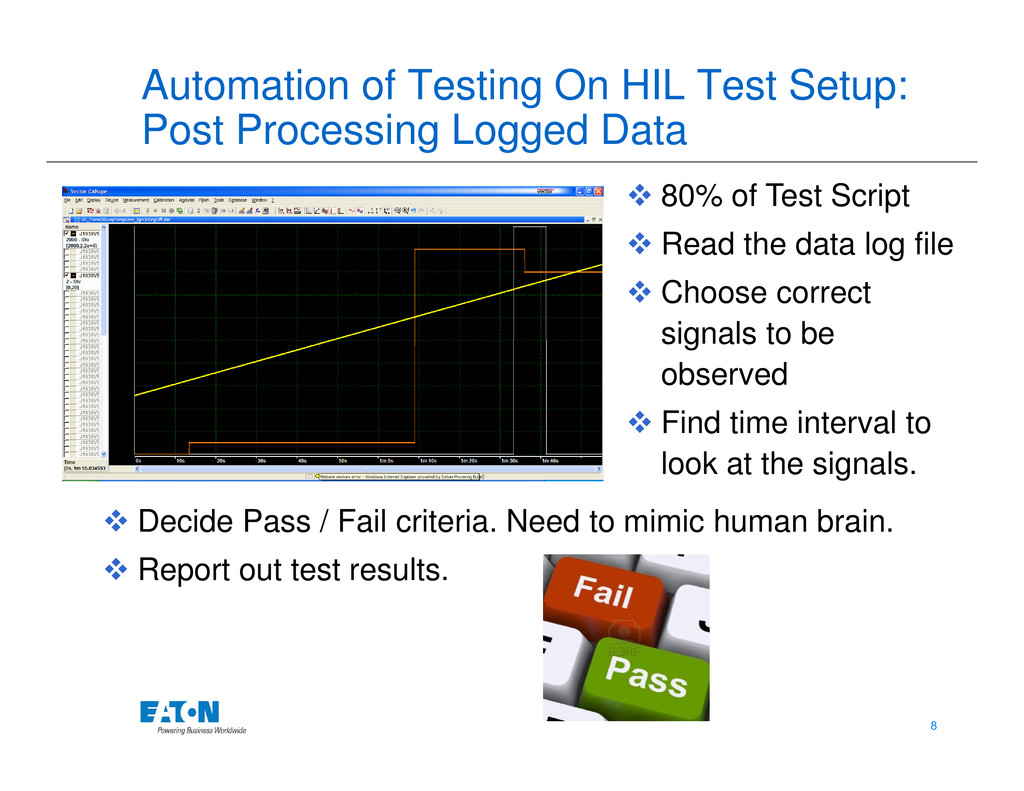
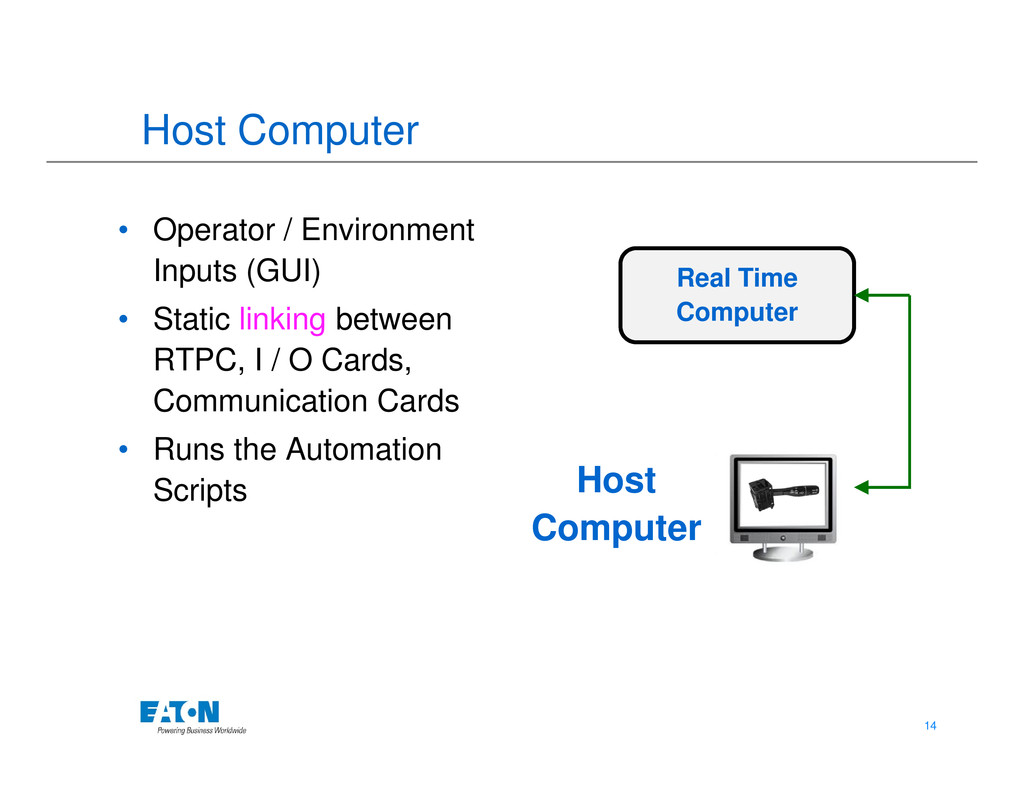
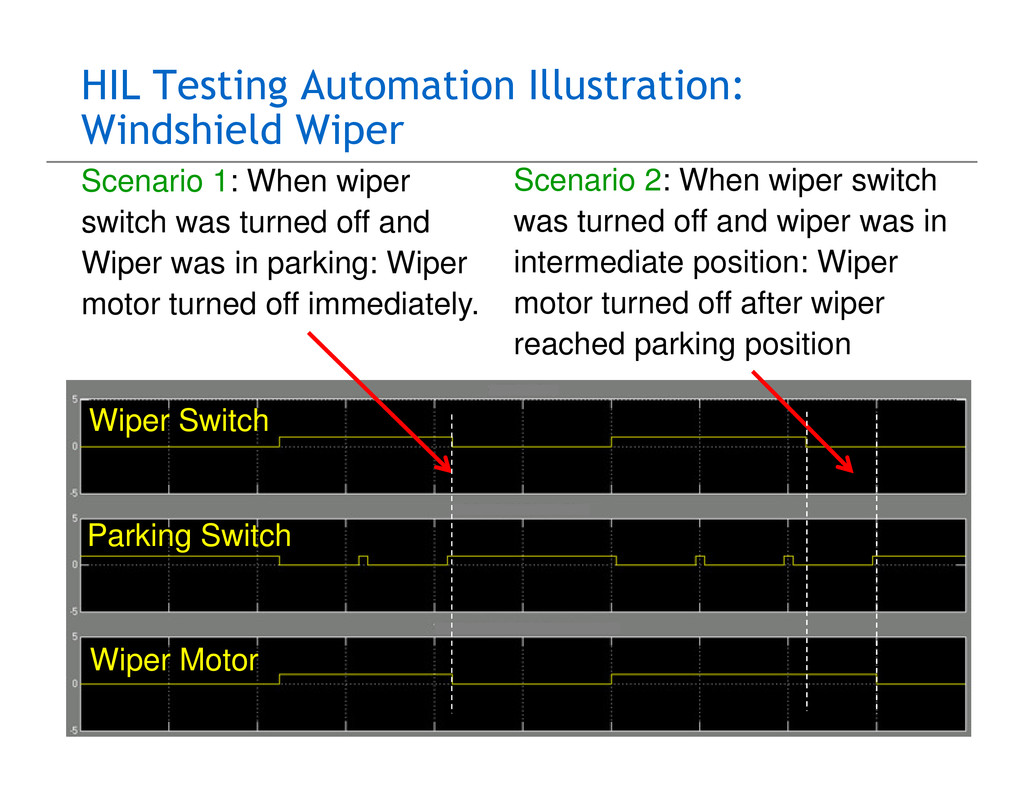
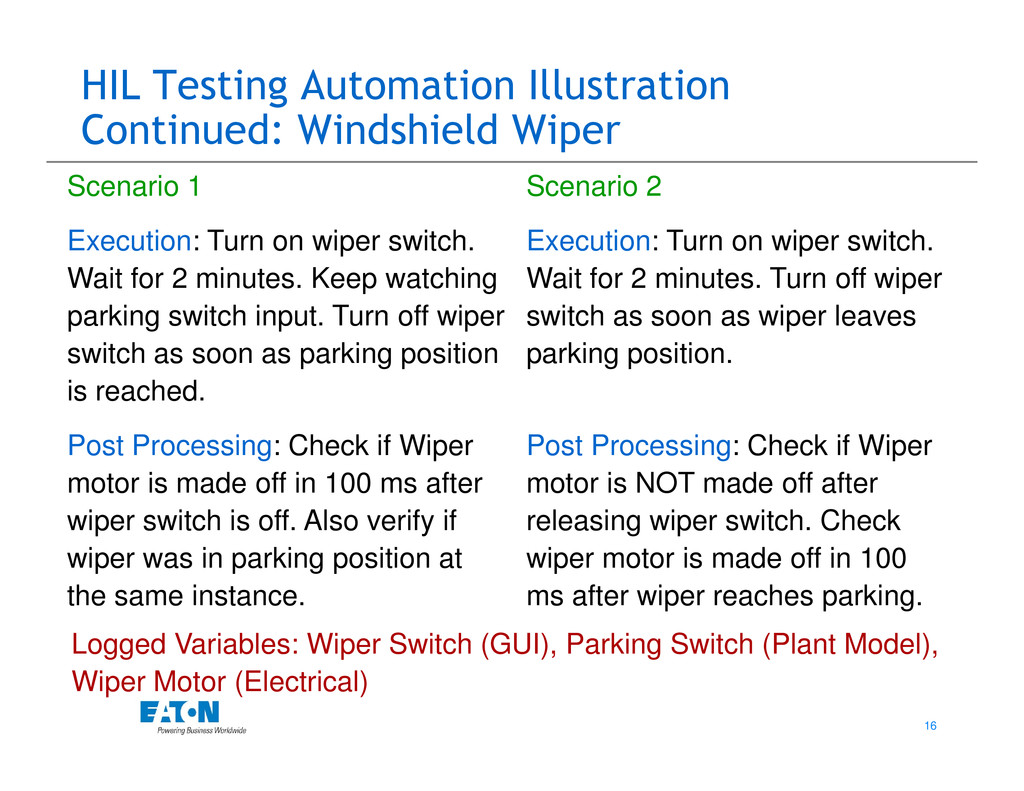
The paper also explains a framework which can be used to automate the testing conducted on HIL Test Setup. Automation test scripts can be written to execute different test scenarios on the test setup, read the data logs and give pass / fail verdicts. The time saving and repeatability achieved using the automation framework is explained.
About the Author
Shrirang Agashe is a mechanical engineer by education and has about 8 years of experience in the industry for Embedded Software development and validation.
He has completed 4.5 years at Eaton now and is working on HIL Test domain. He played a key role in setting up the HIL Test Setups for 3 programs for Eaton Transmission division. He was one of the members who architectured the HIL Test Automation framework using Python for the HIL Testing at Eaton. On the process side, he has participated in the CMMI level 3 audit at Eaton.
Prior to Eaton, he worked with KPIT Cummins and Tata Technologies. In KPIT he worked on development of diagnostics for Transmission Systems using Matlab Simulink. He has worked on developing the Matlab Stateflow models for Body Control Module (BCM) at Tata Technologies and has a good hands on experience with Matlab, m scripting, RTW code generation, Target Link Code generation and application coding using C. He also developed complete KWP 2K protocol stack using C.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}