Best Poster Session Award Winning Poster by Logica @STC 2012.
Authors - Prasad Kumaran & Vijesh Kumar Bhupathi Raju
Poster Abstract
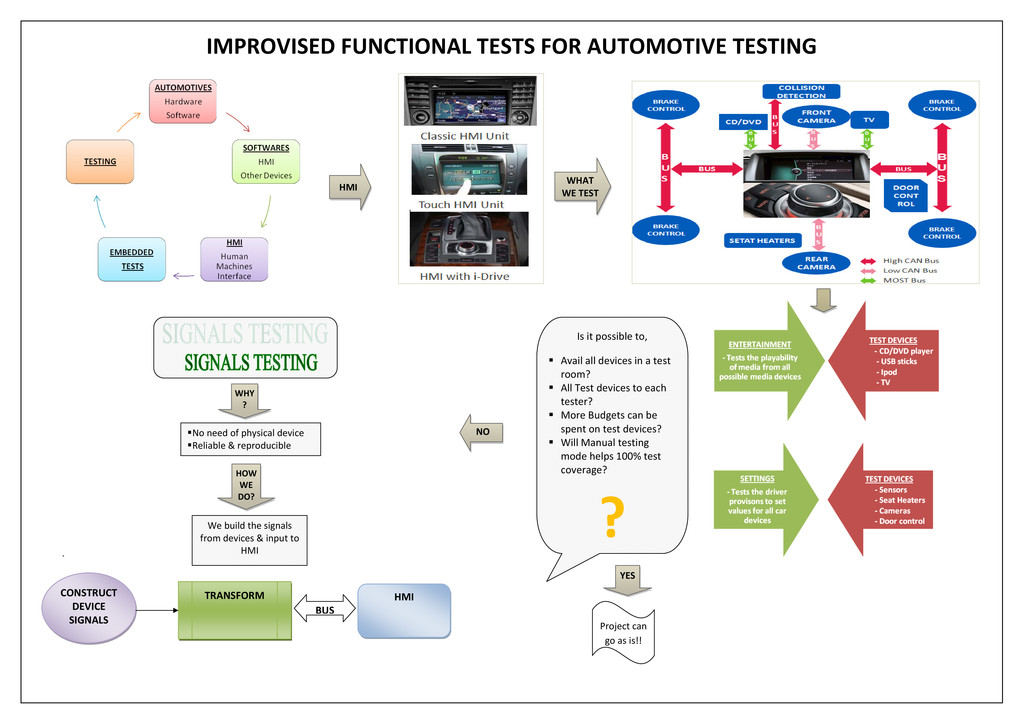
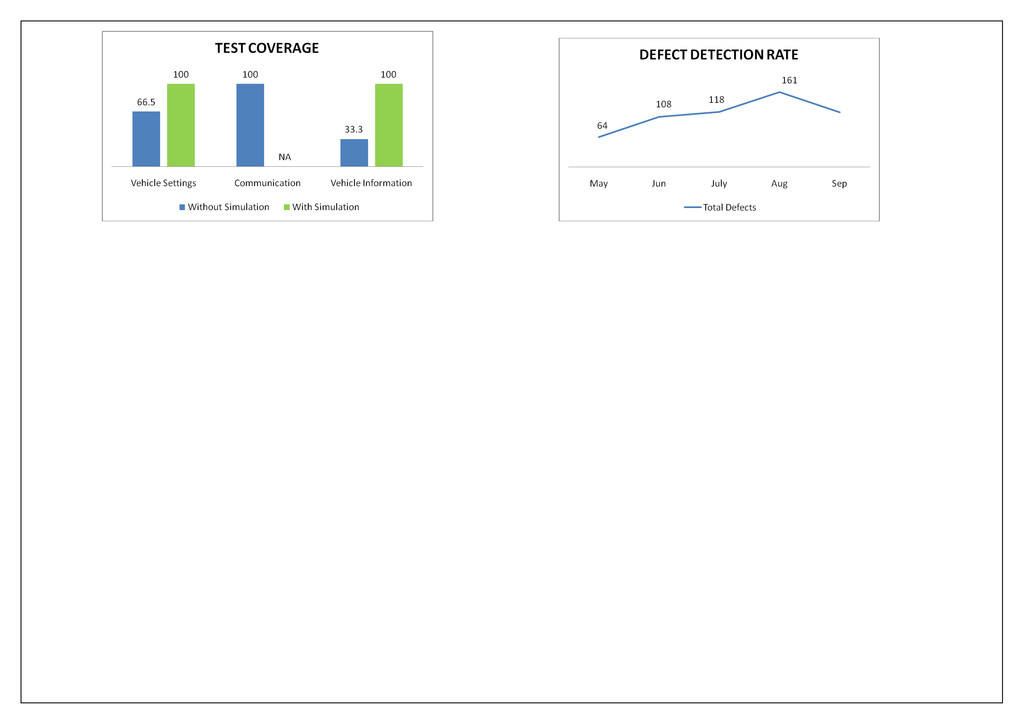
A major goal of testing in any area of business is achieving high test coverage. In most of the cases, Functional testing is a significant one & covers a major portion of testing. Also this test cover major functions of the end users, attaining 100% of functional test is essential. But, due to some factors like limitation in test environment, delay in code, revised timelines etc affect this functional coverage.
In the automotive testing, on an average 12% of functional tests could not be covered because of the environment limitation & code delay. In contrary, to overcome this blockade by availing adequate test devices & production like test environment will eventually make a significant achievement on the Functional coverage but compromises the project budget.
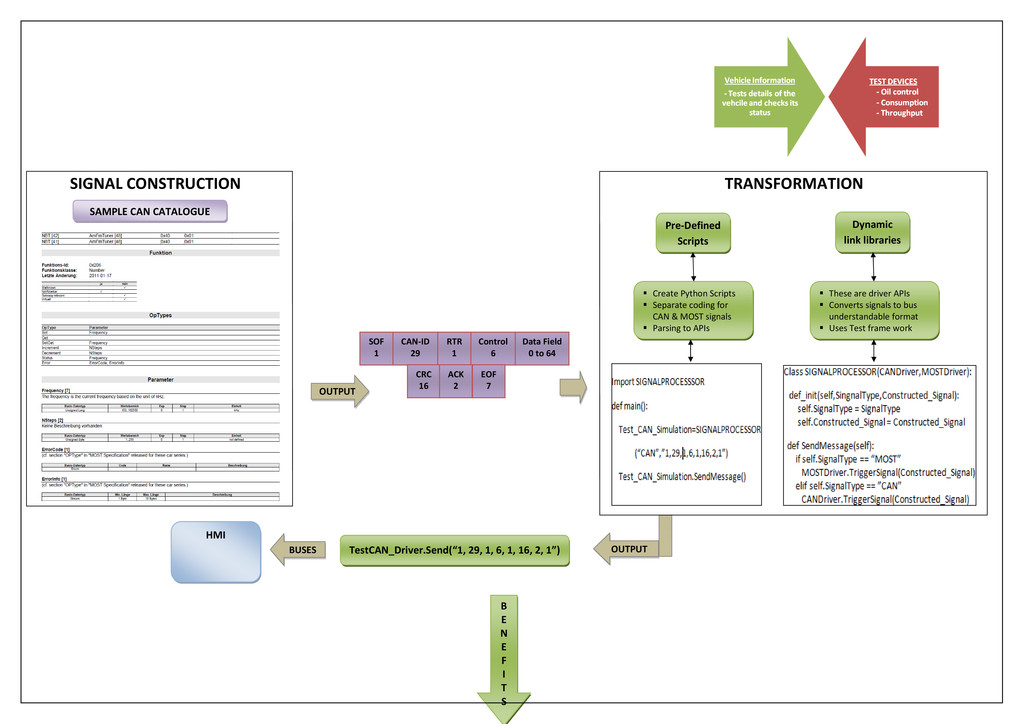
So, in order to achieve more functional coverage and overcome the blockades, we propose an alternative strategy called “Signals Testing”.
About the Authors
Prasad Kumaran, an Electronics & Communication Engineer works as IT Consultant in Logica (now a part of CGI). He has 5 years of IT experience as a SAP tester in Banking & Finance and Automotive domains.
Vijesh Kumar Raju B is a Biotechnology Graduate from VIT University, Vellore, working as IT consultant in Logica (now a part of CGI). He has 4 years of experience in IT industry as Test Automation Analyst with technical expertise in Visual Basic script, Java and Python and have wide experience in Banking & Finance, Public Sector and Automotive domain.
{kind=link}
{kind=link}
{kind=link}