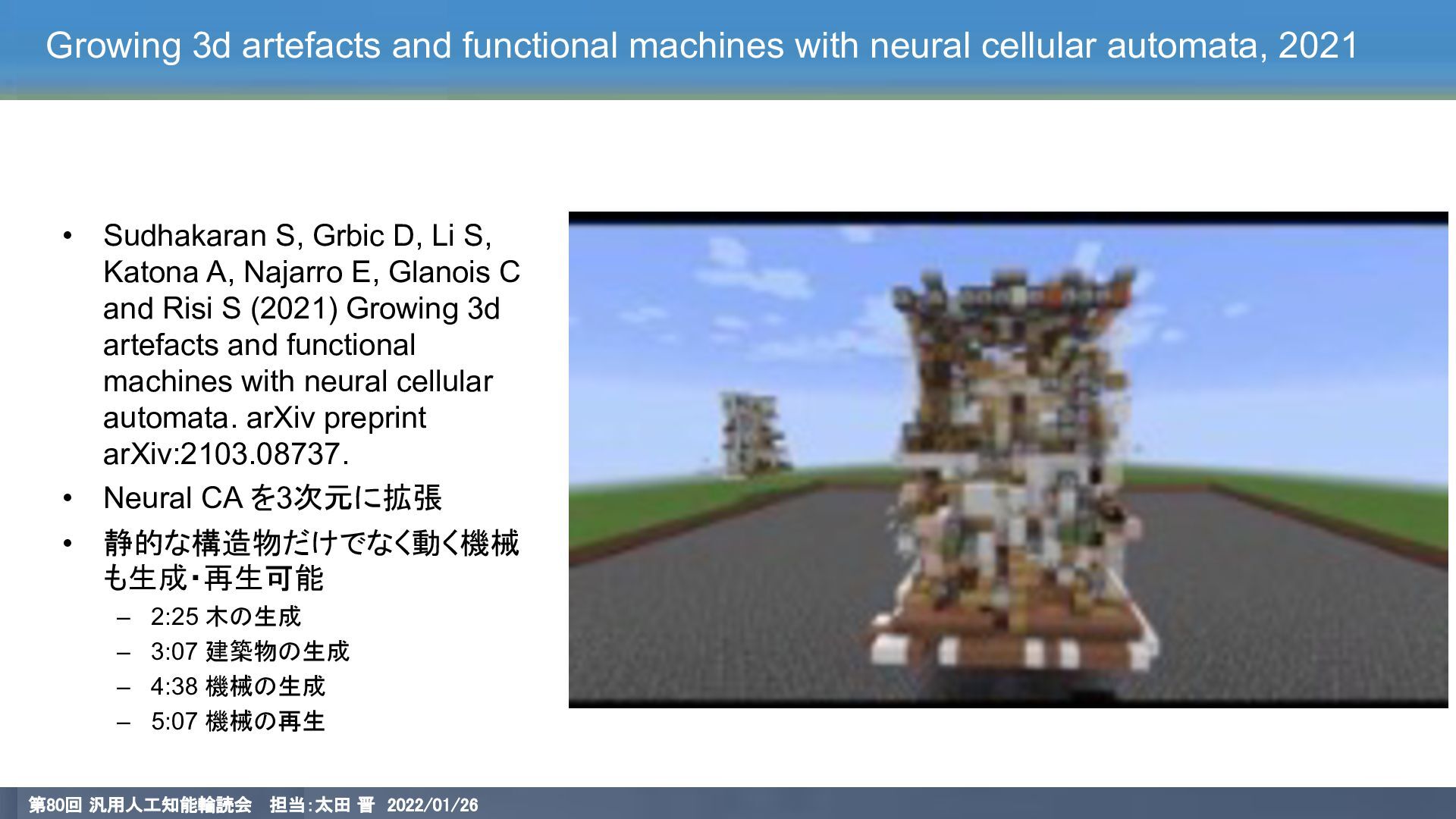
2021 • Sudhakaran S, Grbic D, Li S, Katona A, Najarro E, Glanois C and Risi S (2021) Growing 3d artefacts and functional machines with neural cellular automata. arXiv preprint arXiv:2103.08737. • Neural CA を3次元に拡張 • 静的な構造物だけでなく動く機械 も生成・再生可能 – 2:25 木の生成 – 3:07 建築物の生成 – 4:38 機械の生成 – 5:07 機械の再生 第80回 汎用人工知能輪読会 担当:太田 晋 2022/01/26
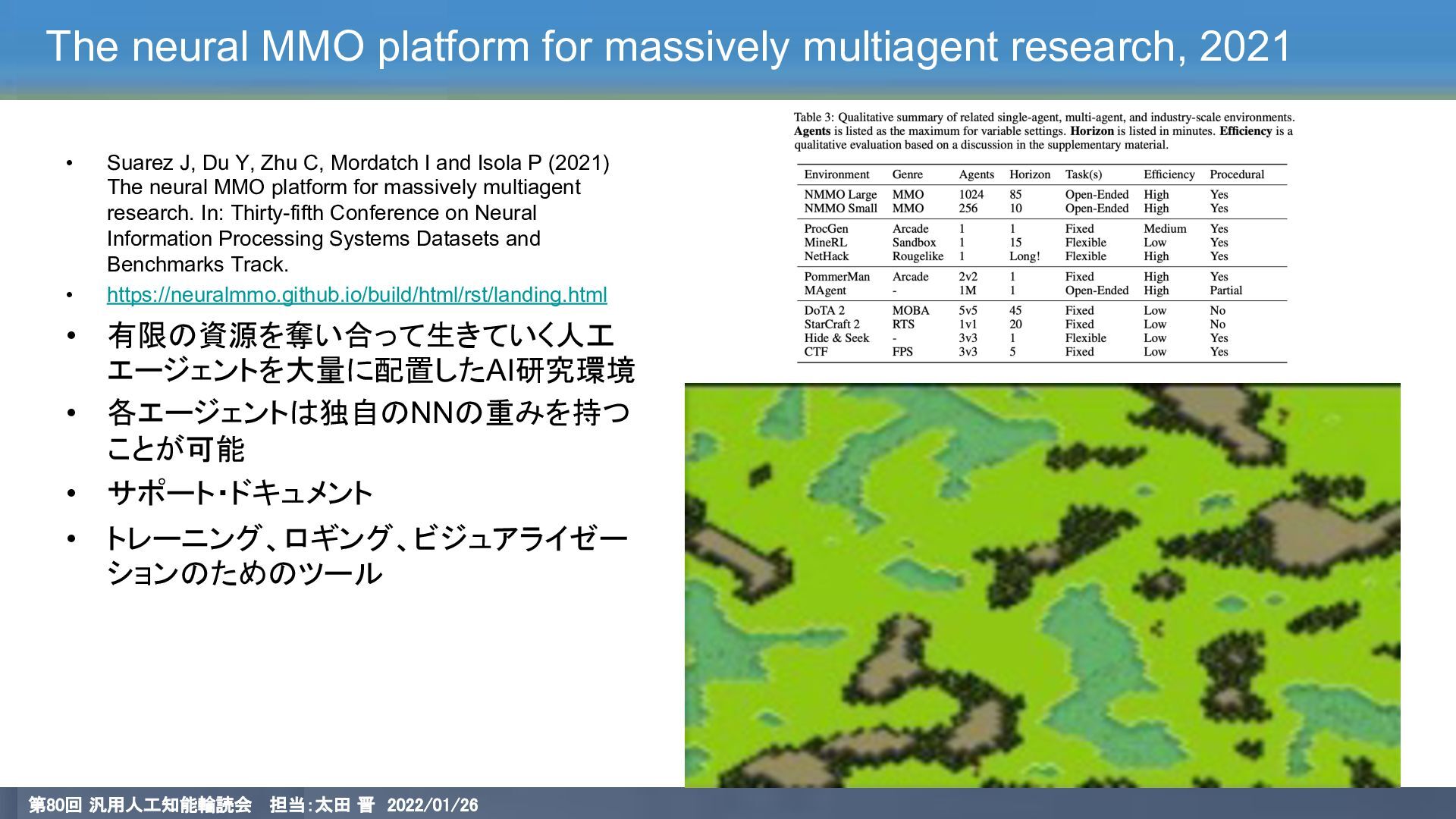
Suarez J, Du Y, Zhu C, Mordatch I and Isola P (2021) The neural MMO platform for massively multiagent research. In: Thirty-fifth Conference on Neural Information Processing Systems Datasets and Benchmarks Track. • https://neuralmmo.github.io/build/html/rst/landing.html • 有限の資源を奪い合って生きていく人工 エージェントを大量に配置したAI研究環境 • 各エージェントは独自のNNの重みを持つ ことが可能 • サポート・ドキュメント • トレーニング、ロギング、ビジュアライゼー ションのためのツール 第80回 汎用人工知能輪読会 担当:太田 晋 2022/01/26
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}