deep-learning3.pdf The Cityscapes Dataset for Semantic Urban Scene Understanding Marius Cordts, Mohamed Omran, Sebastian Ramos, Timo Rehfeld, Markus Enzweiler, Rodrigo Benenson, Uwe Franke, Stefan Roth, Bernt Schiele
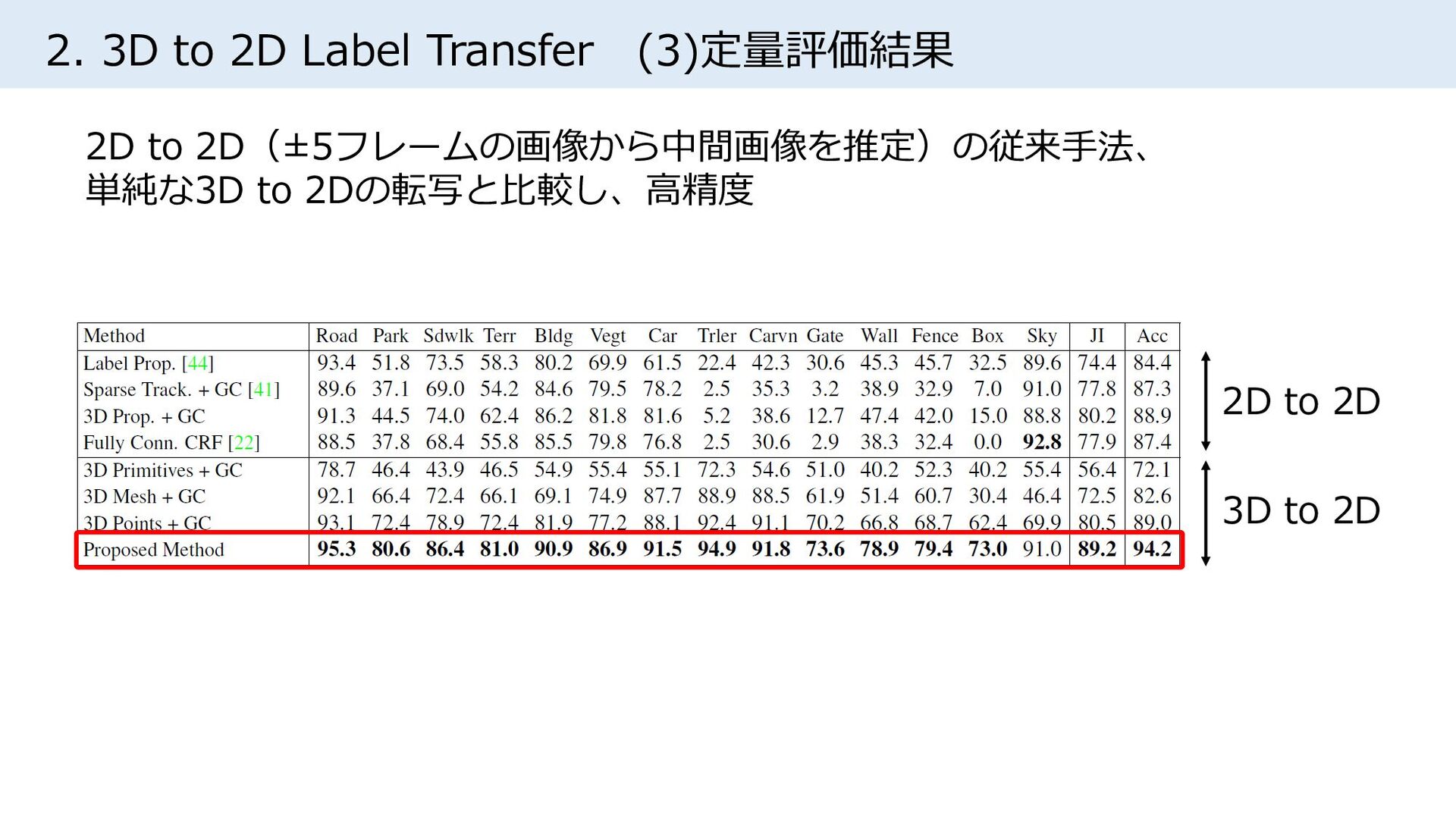
Street Scenes by 3D to 2D Label Transfer Jun Xie, Martin Kiefel, Ming-Ting Sun, Andreas Geiger 論文: http://www.cv- foundation.org/openaccess/content_cvpr_2016/papers/Xie_Semantic_Instance_Annotation_CVPR _2016_paper.pdf プロジェクトページ: http://www.cvlibs.net/projects/label_transfer/ (2016/7/23時点では未公開)
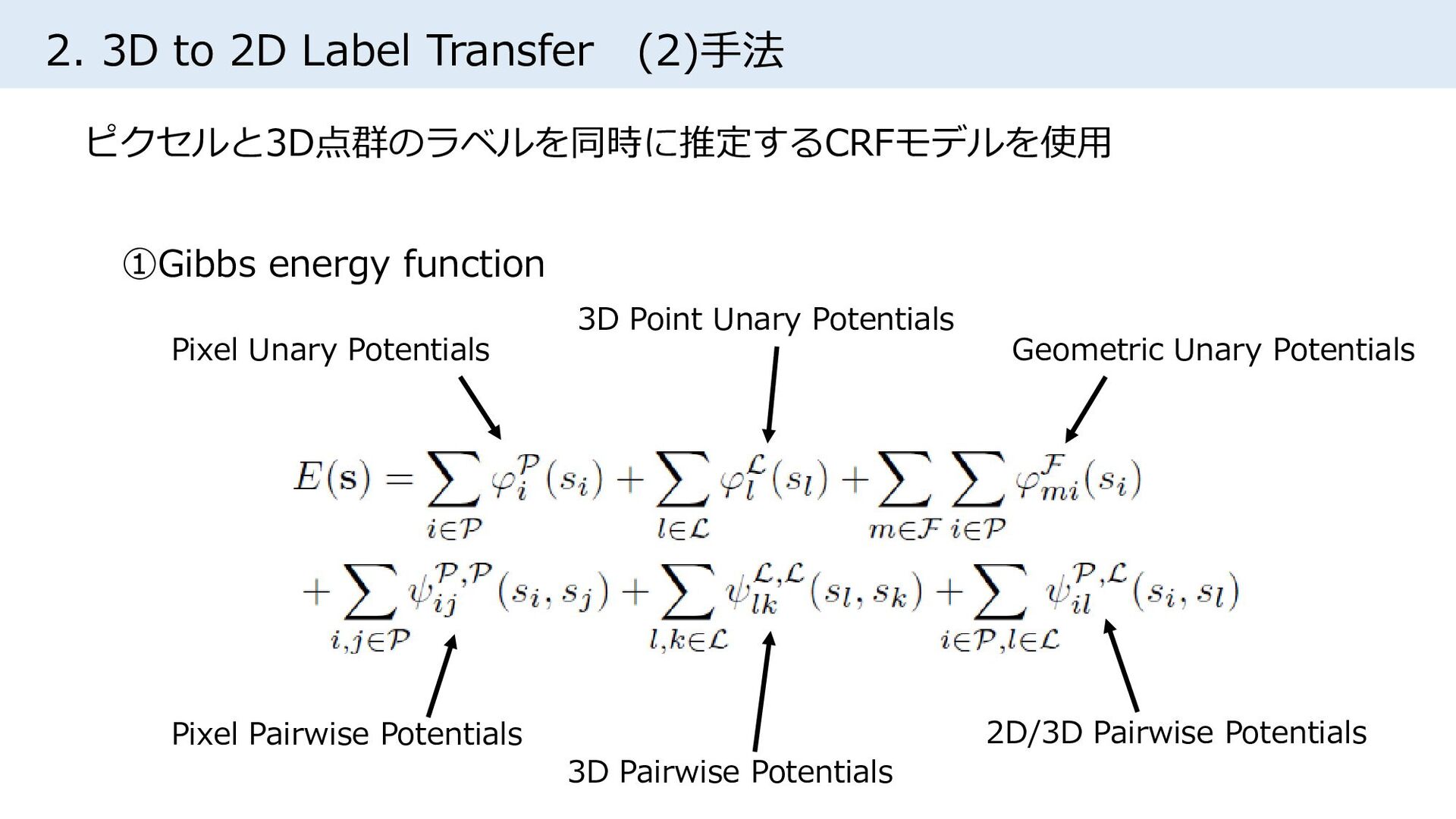
Potentials 3D Point Unary Potentials Geometric Unary Potentials Pixel Pairwise Potentials 2D/3D Pairwise Potentials 3D Pairwise Potentials ①Gibbs energy function
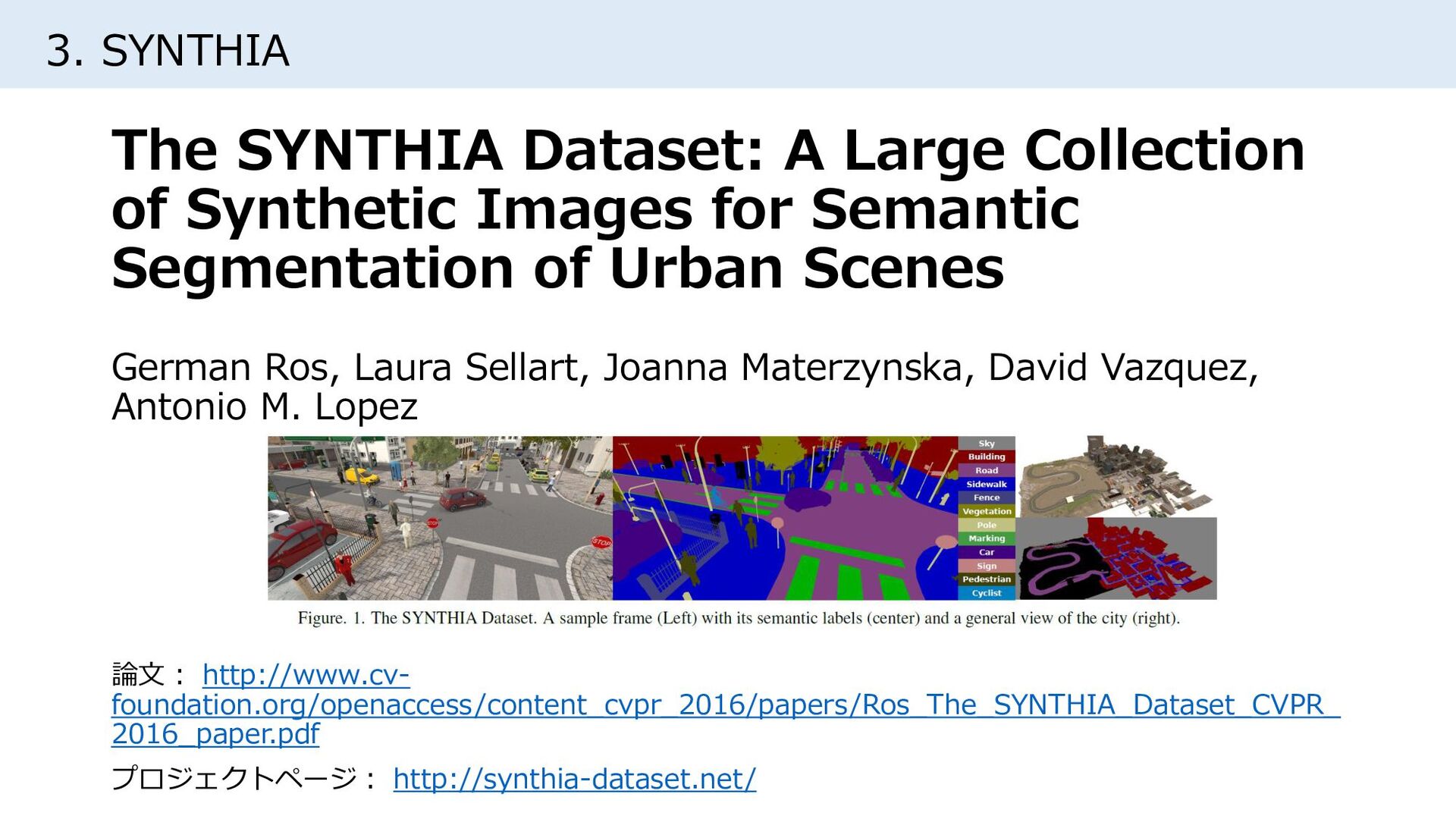
Dataset: A Large Collection of Synthetic Images for Semantic Segmentation of Urban Scenes German Ros, Laura Sellart, Joanna Materzynska, David Vazquez, Antonio M. Lopez
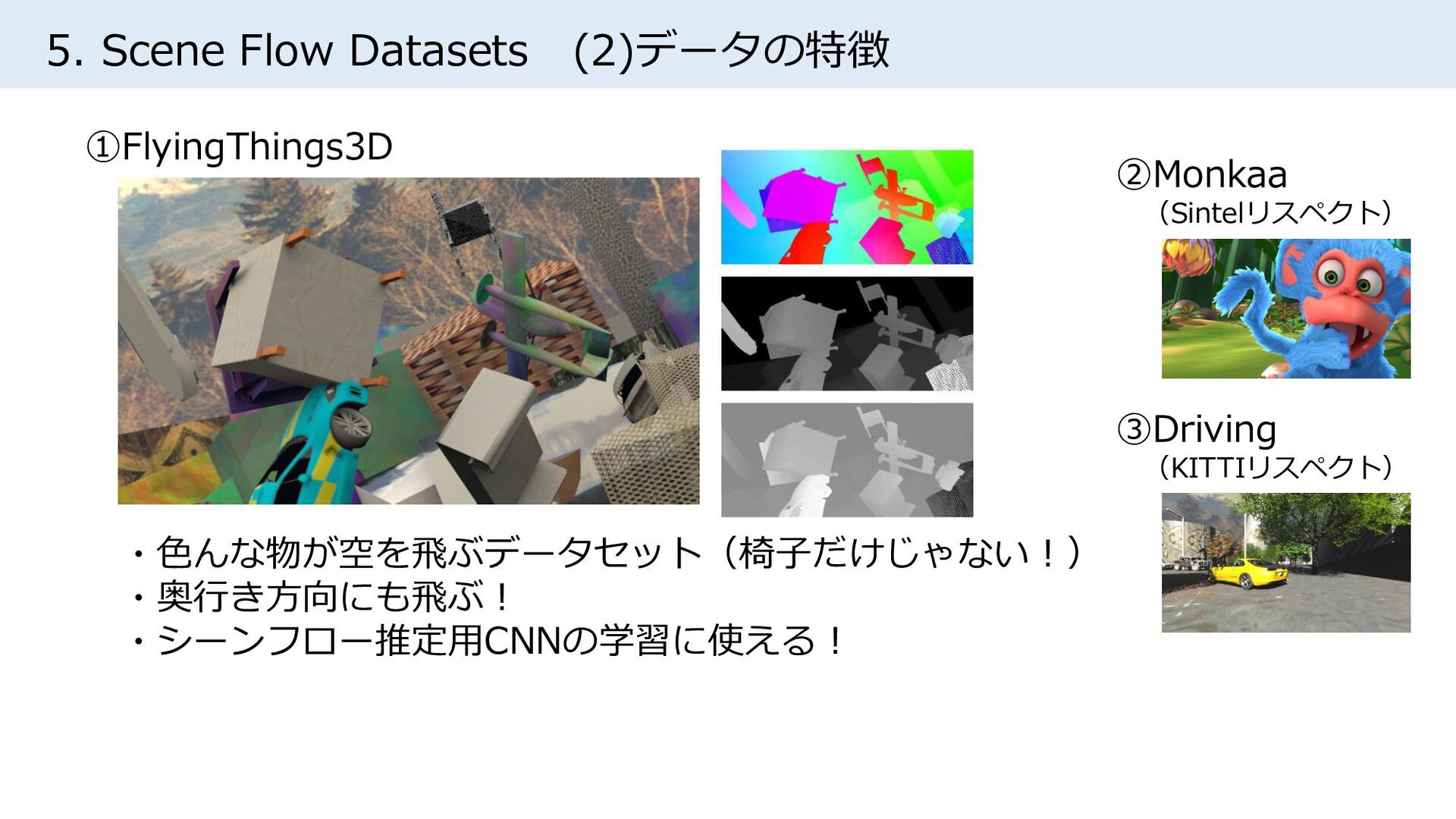
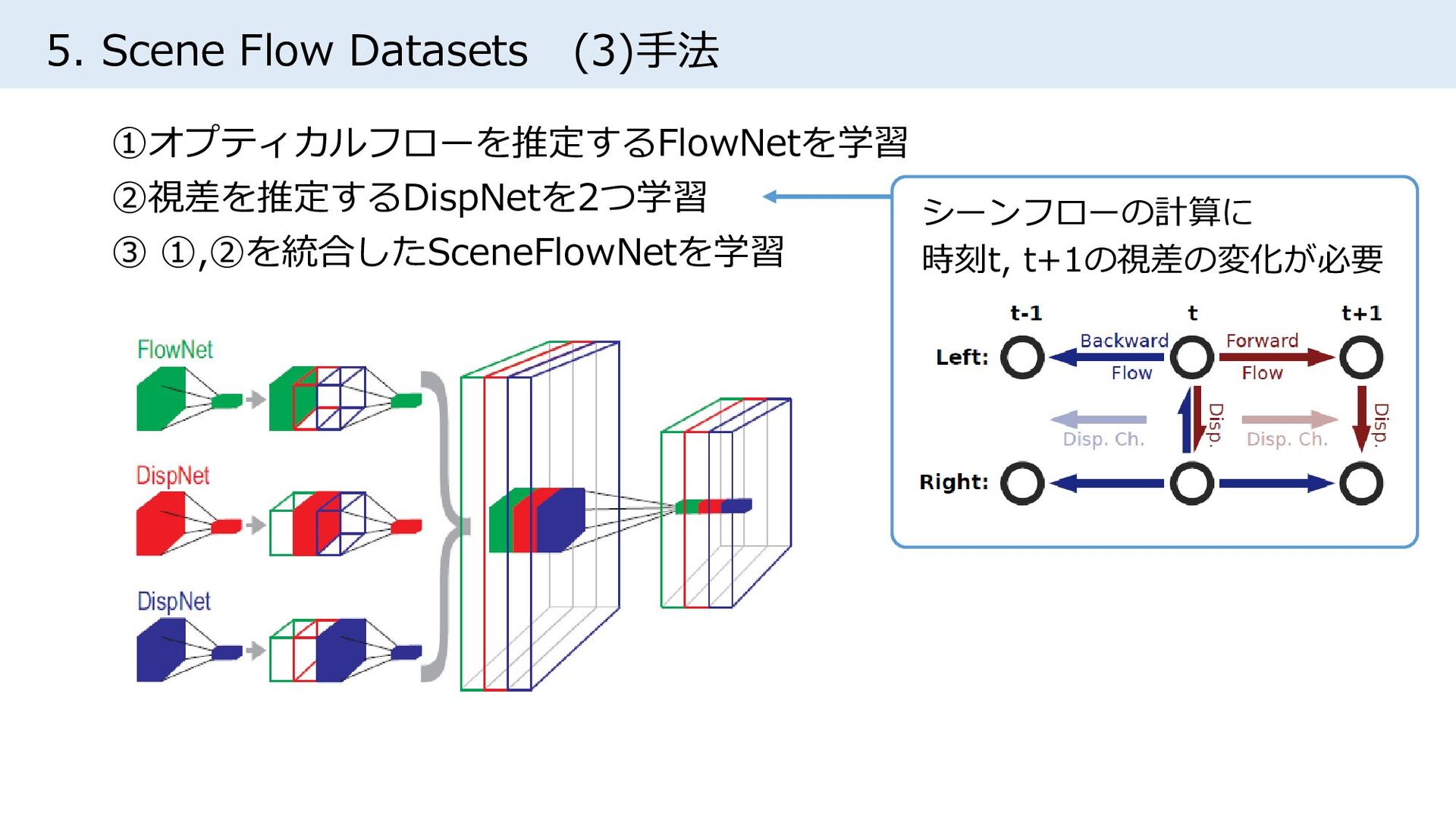
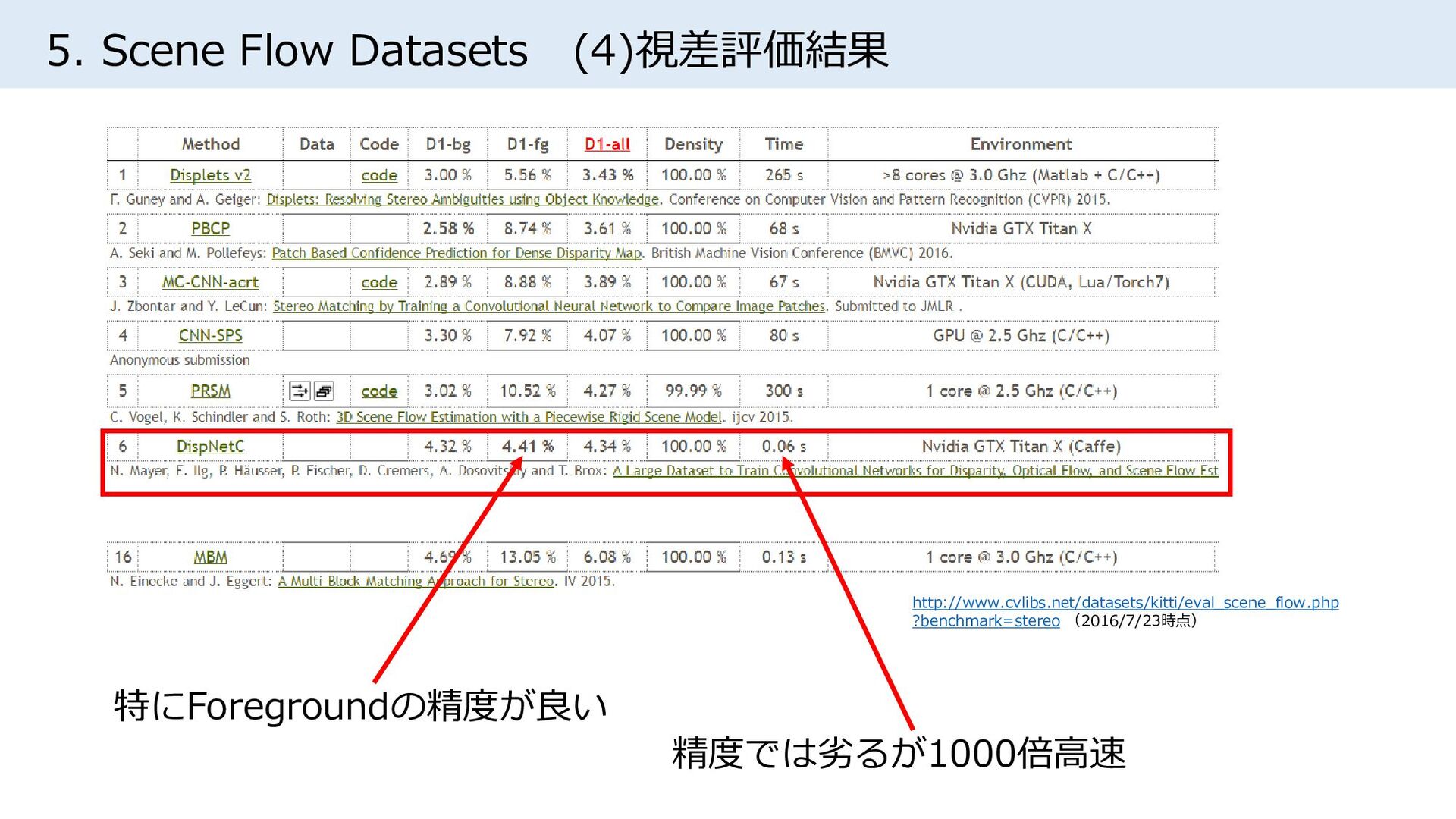
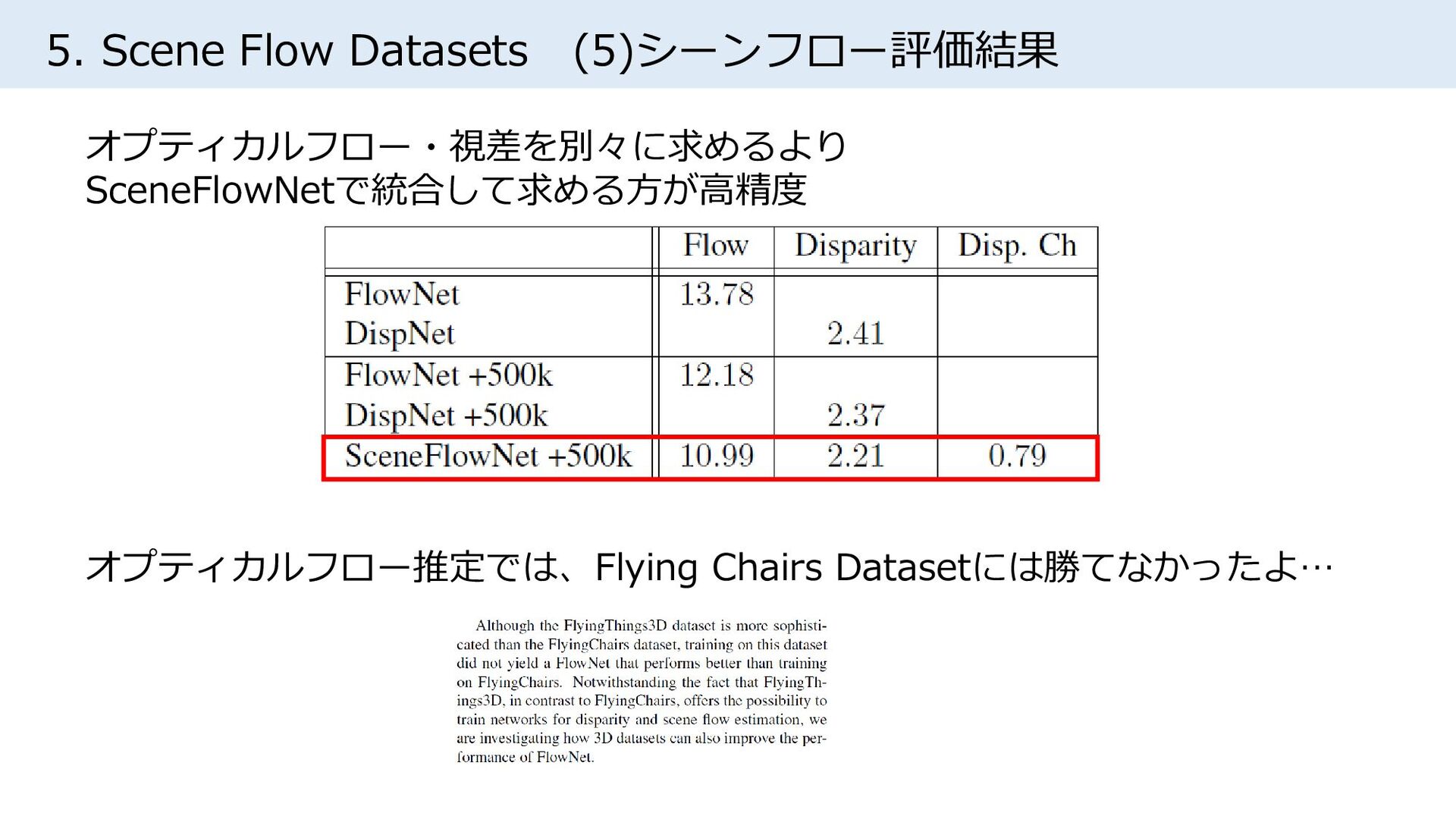
A Large Dataset to Train Convolutional Networks for Disparity, Optical Flow, and Scene Flow Estimation Nikolaus Mayer, Eddy Ilg, Philip Hausser, Philipp Fischer, Daniel Cremers, Alexey Dosovitskiy, Thomas Brox
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![0. 導入 (3)CNNによるSemantic Segmentation FCN[J.Long+, CVPR2015] ← Classification 何が映っているか 矩形ごとに出力](https://files.speakerdeck.com/presentations/e4b9517602df4829ab02f65ce94896a6/slide_4.jpg){kind=link}
![0. 導入 (4)アノテーションの呪い (The Curse of Dataset Annotation) [J.Xie+, CVPR2016]を元に作成](https://files.speakerdeck.com/presentations/e4b9517602df4829ab02f65ce94896a6/slide_5.jpg){kind=link}
![0. 導入 (5)今回紹介する論文・データセット 1. Cityscapes Dataset [M.Cordts+, CVPR2016] 2. 3D](https://files.speakerdeck.com/presentations/e4b9517602df4829ab02f65ce94896a6/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![3. SYNTHIA (2)手法 • 2種のCNNでSemantic Segmentation - T-Net [G.Ros+, arXiv2016]](https://files.speakerdeck.com/presentations/e4b9517602df4829ab02f65ce94896a6/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}