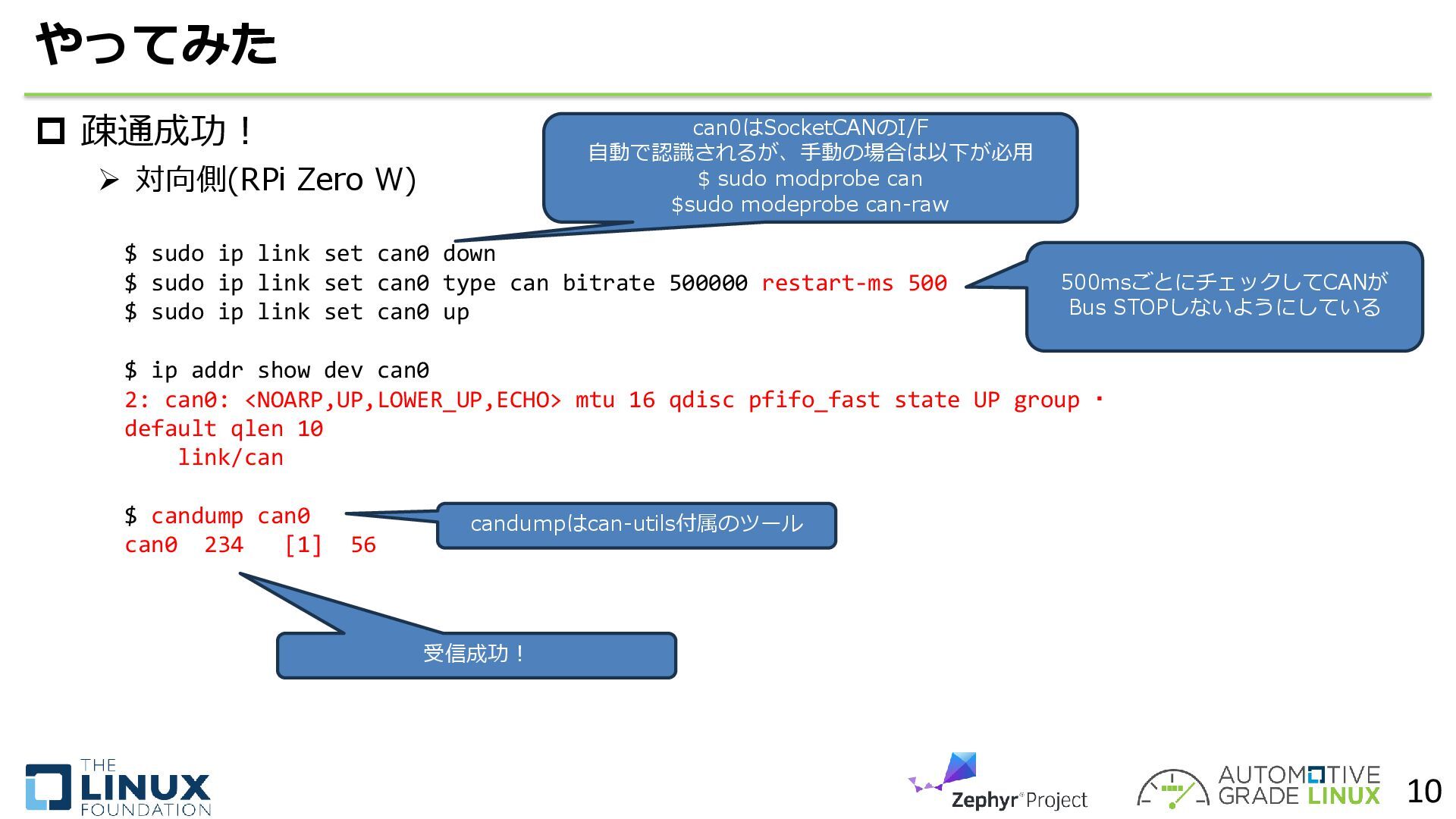
ip link set can0 down $ sudo ip link set can0 type can bitrate 500000 restart-ms 500 $ sudo ip link set can0 up $ ip addr show dev can0 2: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UP group default qlen 10 link/can $ candump can0 can0 234 [1] 56 受信成功! can0はSocketCANのI/F 自動で認識されるが、手動の場合は以下が必用 $ sudo modprobe can $sudo modeprobe can-raw candumpはcan-utils付属のツール 500msごとにチェックしてCANが Bus STOPしないようにしている
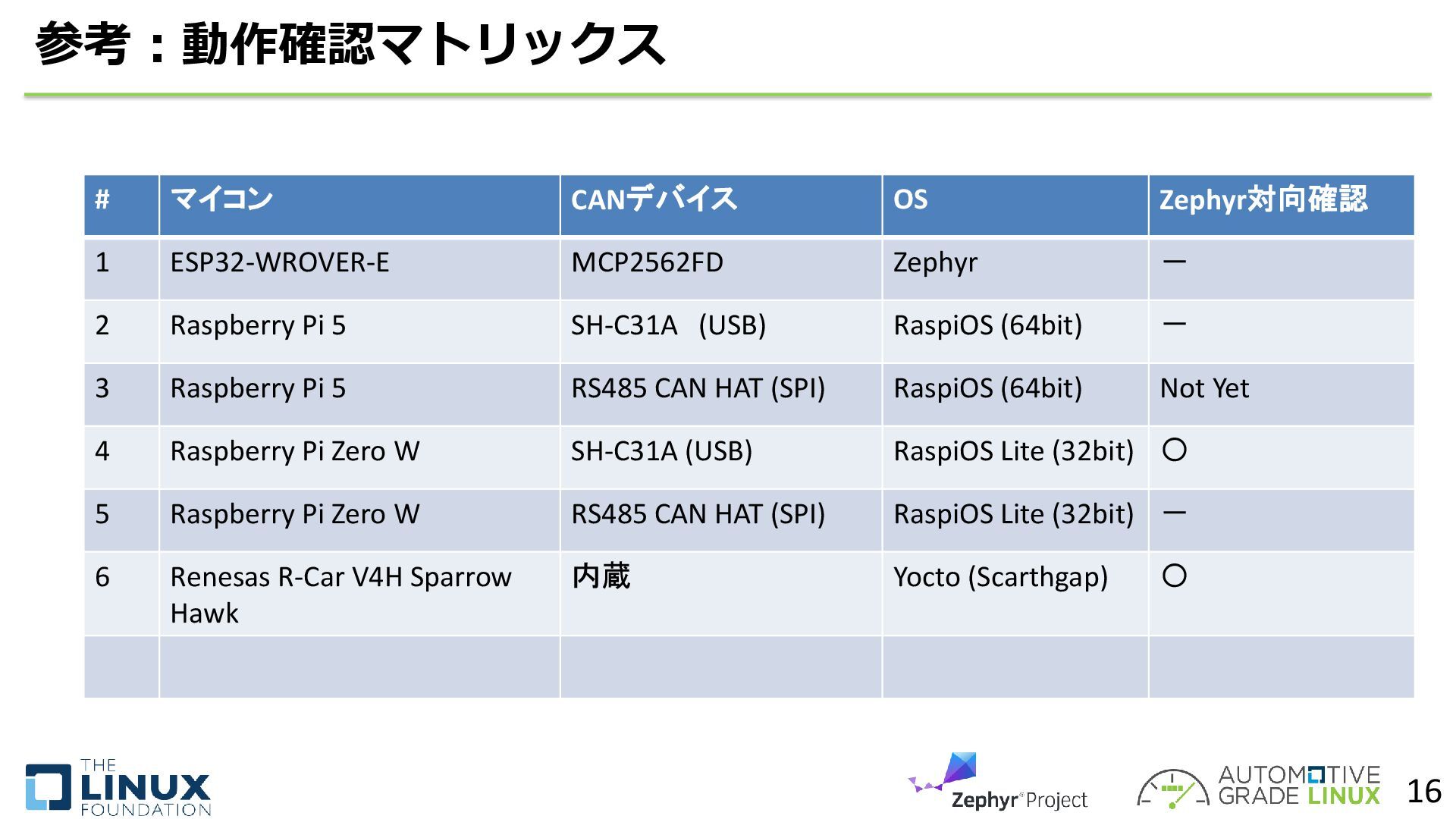
Zephyr - 2 Raspberry Pi 5 SH-C31A (USB) RaspiOS (64bit) - 3 Raspberry Pi 5 RS485 CAN HAT (SPI) RaspiOS (64bit) Not Yet 4 Raspberry Pi Zero W SH-C31A (USB) RaspiOS Lite (32bit) 〇 5 Raspberry Pi Zero W RS485 CAN HAT (SPI) RaspiOS Lite (32bit) - 6 Renesas R-Car V4H Sparrow Hawk 内蔵 Yocto (Scarthgap) 〇
Barriers to OSS Contributions in the Automotive Industry https://docs.google.com/forms/d/e/1FAIpQLSdZ1VInvBj72zV6CCTSSU0misi4Az2T9j2ggtawutMLX3b_YA/viewform 自動車業界におけるOSSコントリビューションの阻害要因に関する調査 https://docs.google.com/forms/d/e/1FAIpQLSeYM4q8DUy0S0D2aV6f5QEittTIZ0b5bekGT_-BNhcPIBmDPA/viewform
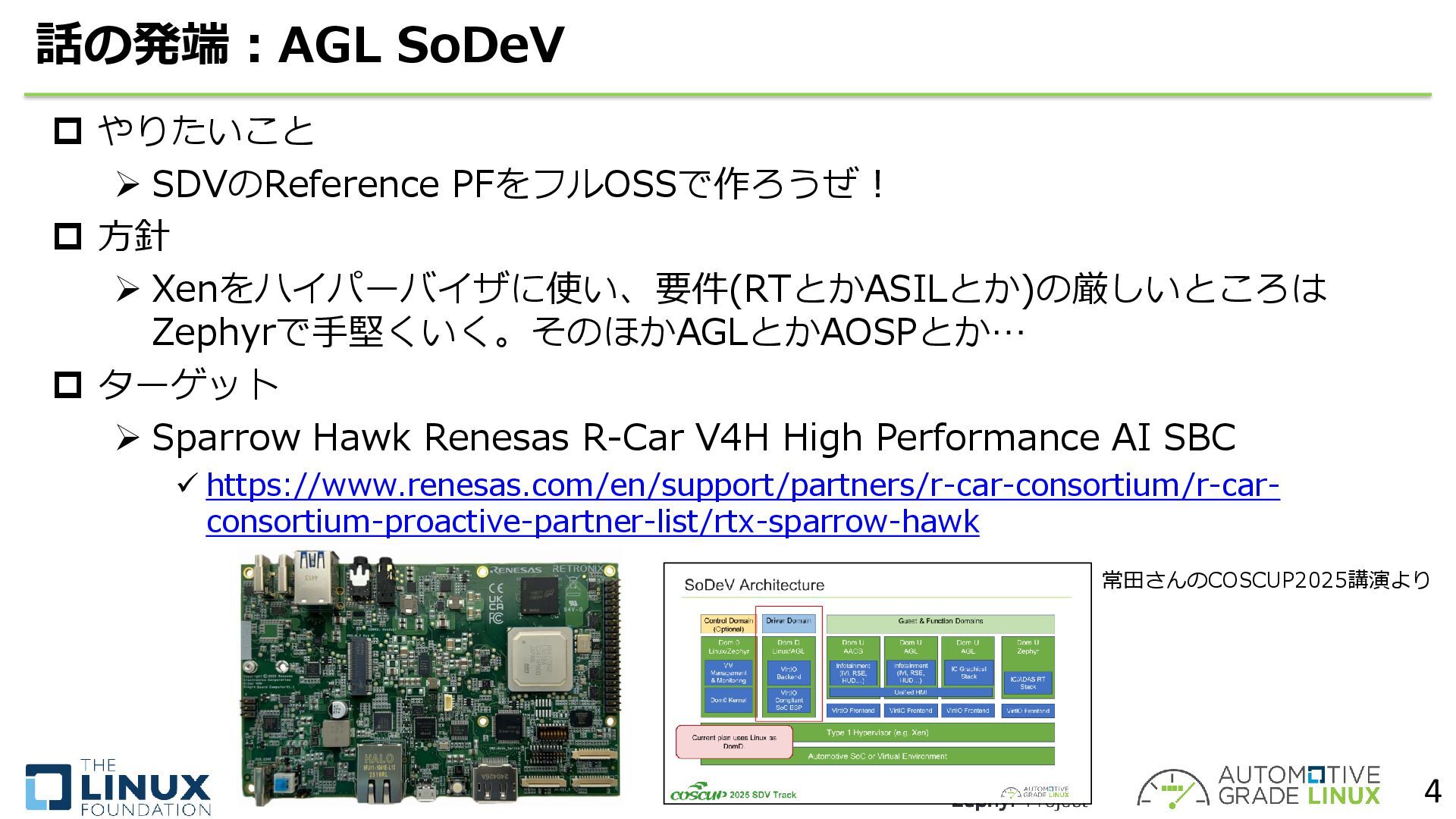
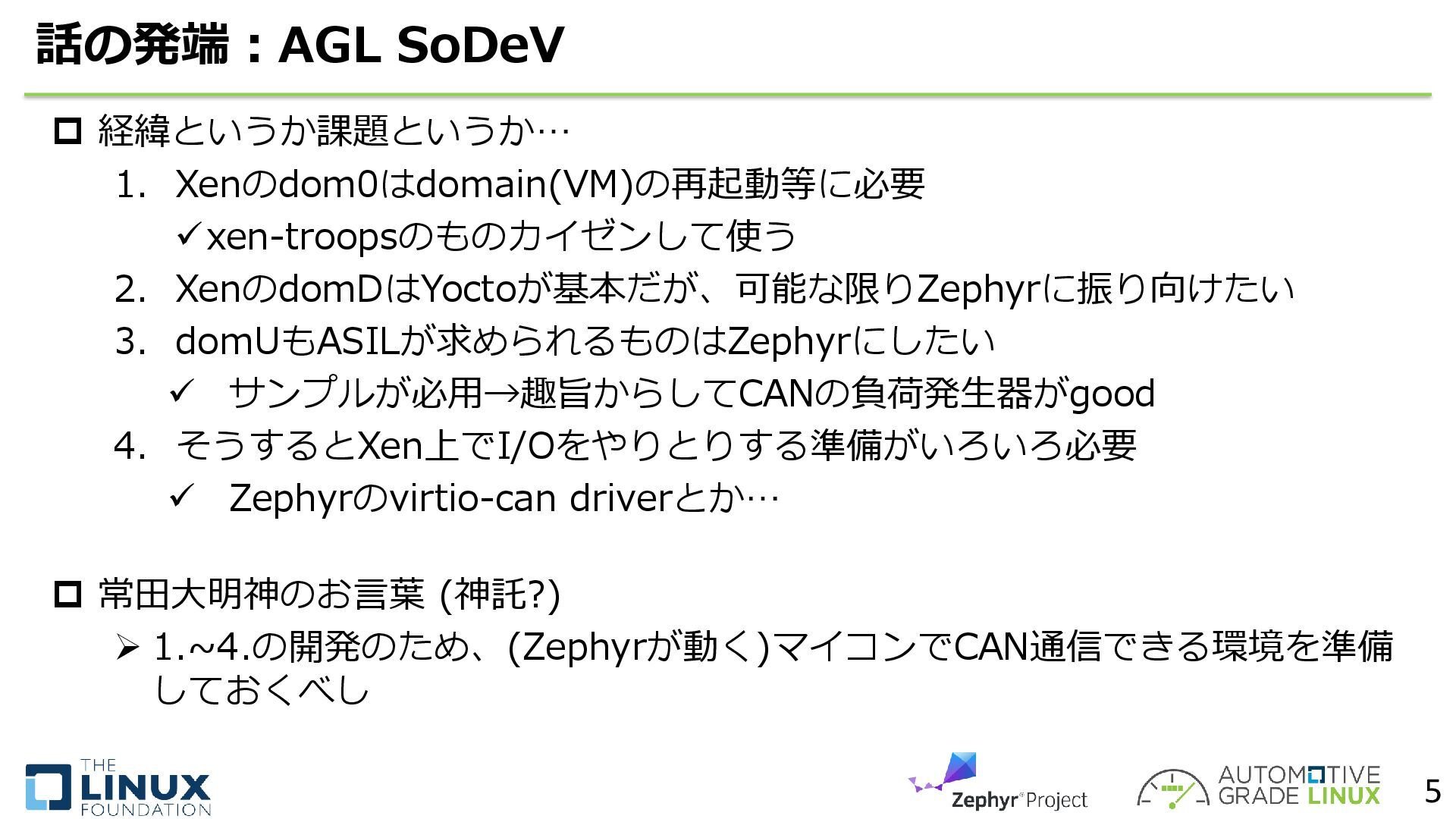
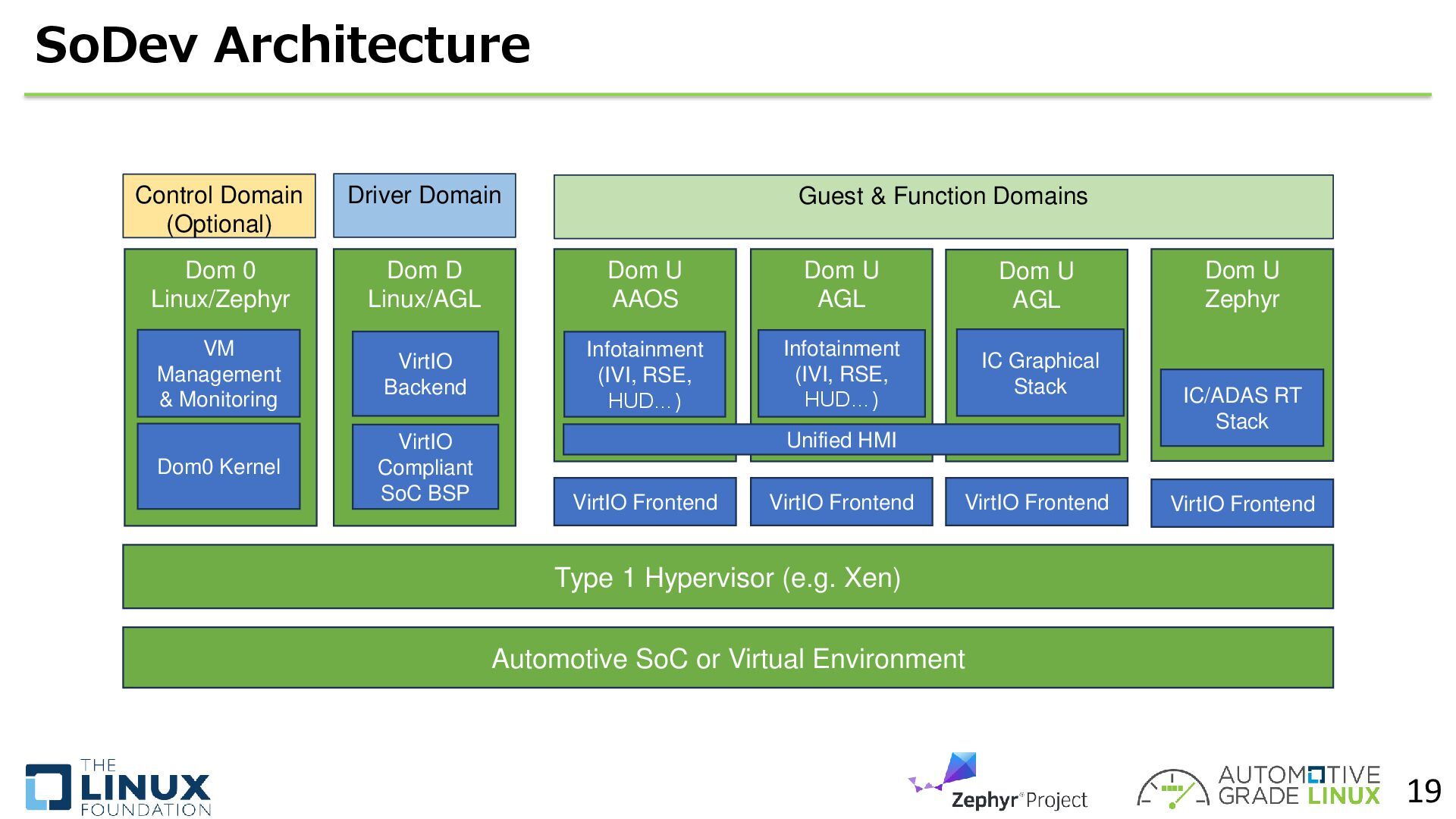
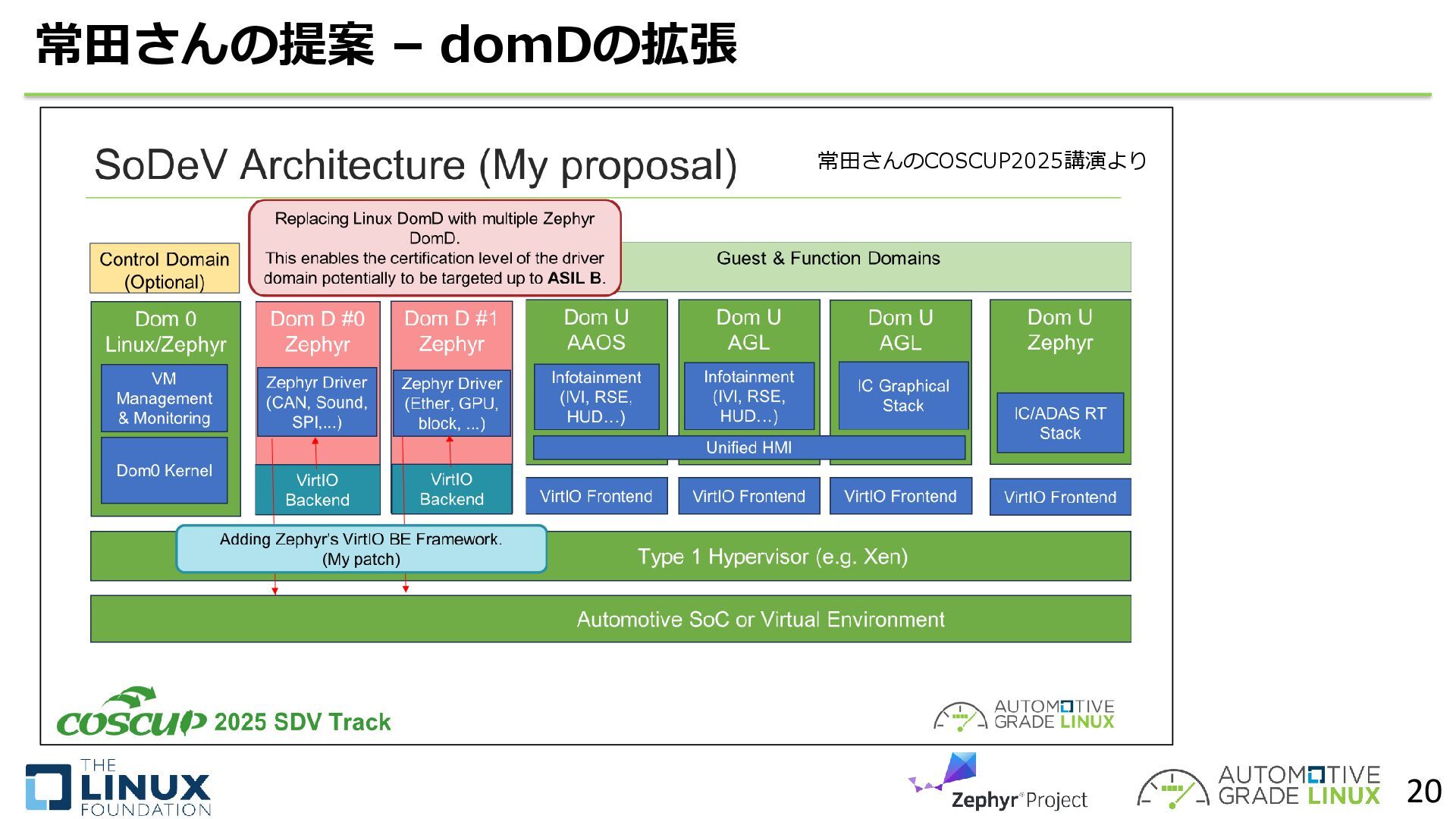
or Virtual Environment Dom 0 Linux/Zephyr Control Domain (Optional) Dom D Linux/AGL VirtIO Backend Driver Domain VirtIO Compliant SoC BSP Dom U AAOS VM Management & Monitoring Dom0 Kernel Guest & Function Domains Dom U AGL Dom U Zephyr VirtIO Frontend VirtIO Frontend VirtIO Frontend Infotainment (IVI, RSE, HUD…) IC Graphical Stack IC/ADAS RT Stack Dom U AGL VirtIO Frontend Infotainment (IVI, RSE, HUD…) Unified HMI
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![9 やってみた 疎通成功! $ west espressif monitor (snip) [00:00:00.175,000]](https://files.speakerdeck.com/presentations/6242521c547a46d6907fd20b5e59fbeb/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}