A very brief introduction to the differential-geometric view of classical dynamics for engineers. This was a talk I presented to my research group at Cornell.
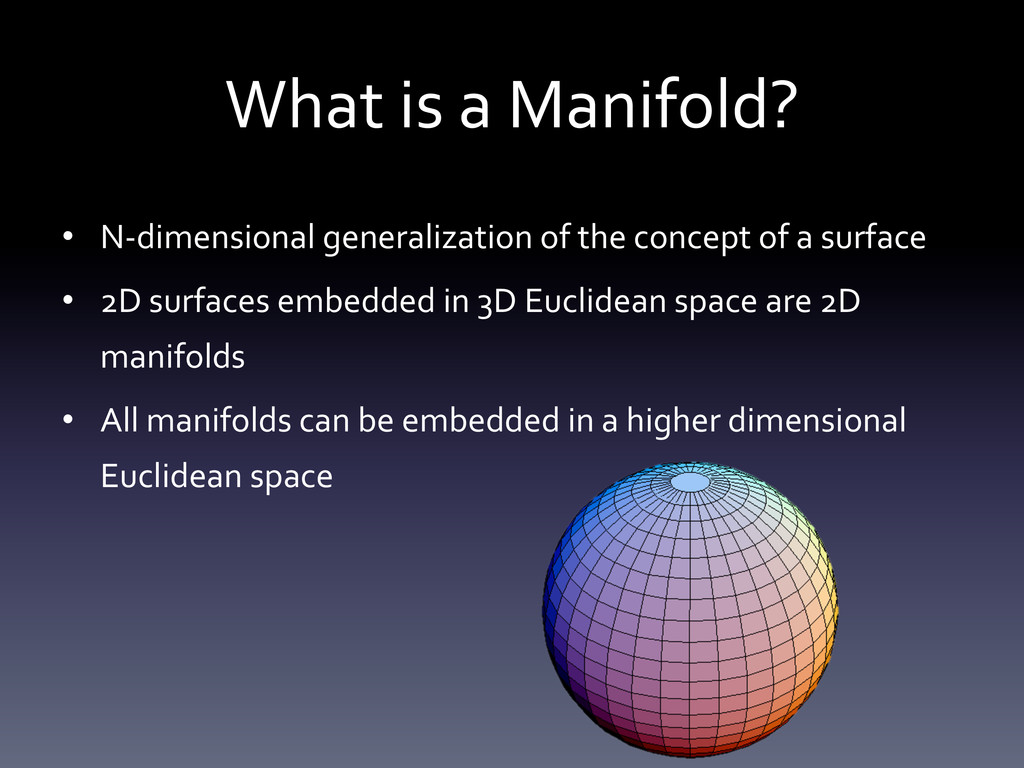
concept of a surface • 2D surfaces embedded in 3D Euclidean space are 2D manifolds • All manifolds can be embedded in a higher dimensional Euclidean space
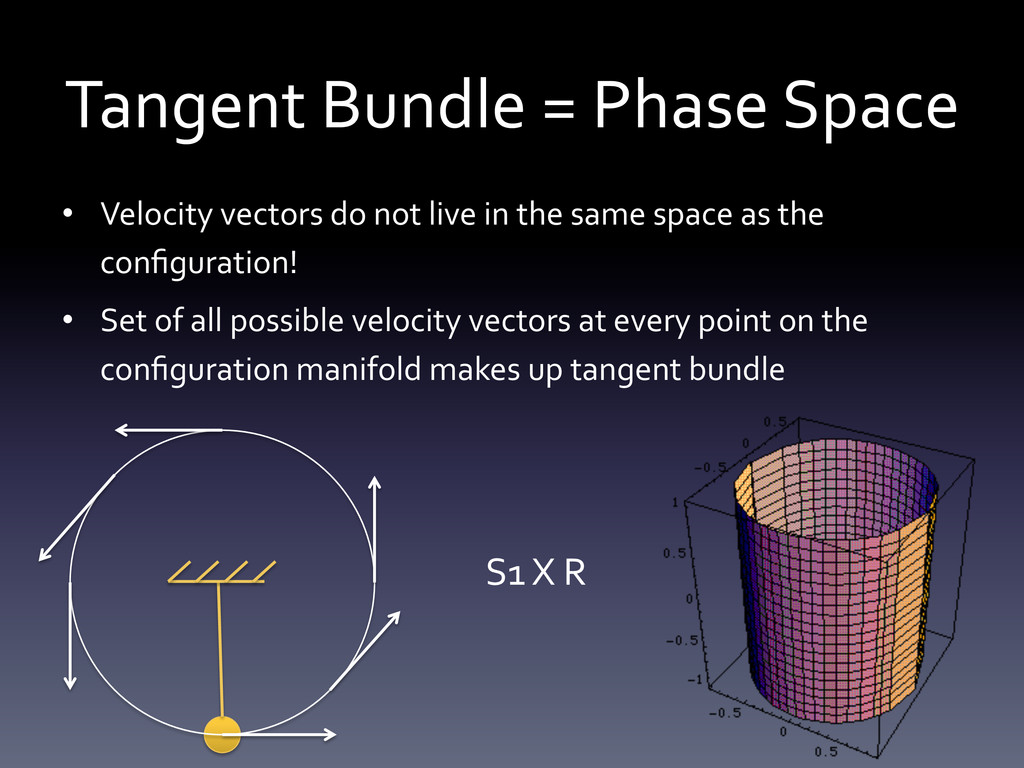
not live in the same space as the configuration! • Set of all possible velocity vectors at every point on the configuration manifold makes up tangent bundle S1 X R
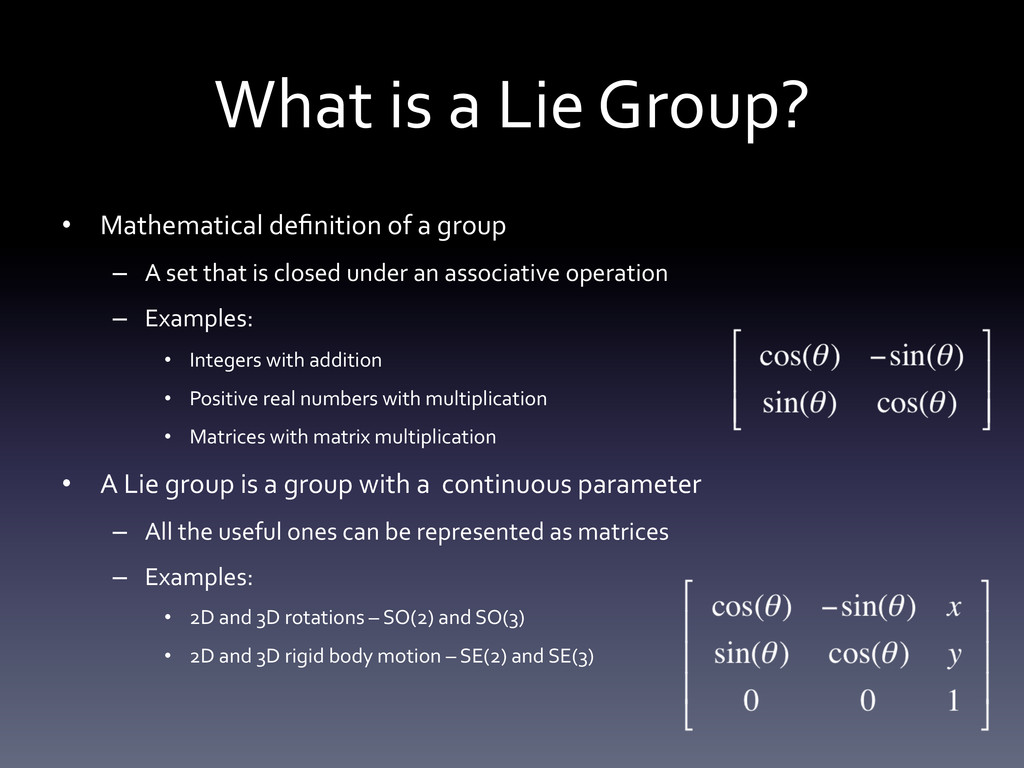
a group – A set that is closed under an associative operation – Examples: • Integers with addition • Positive real numbers with multiplication • Matrices with matrix multiplication • A Lie group is a group with a continuous parameter – All the useful ones can be represented as matrices – Examples: • 2D and 3D rotations – SO(2) and SO(3) • 2D and 3D rigid body motion – SE(2) and SE(3)
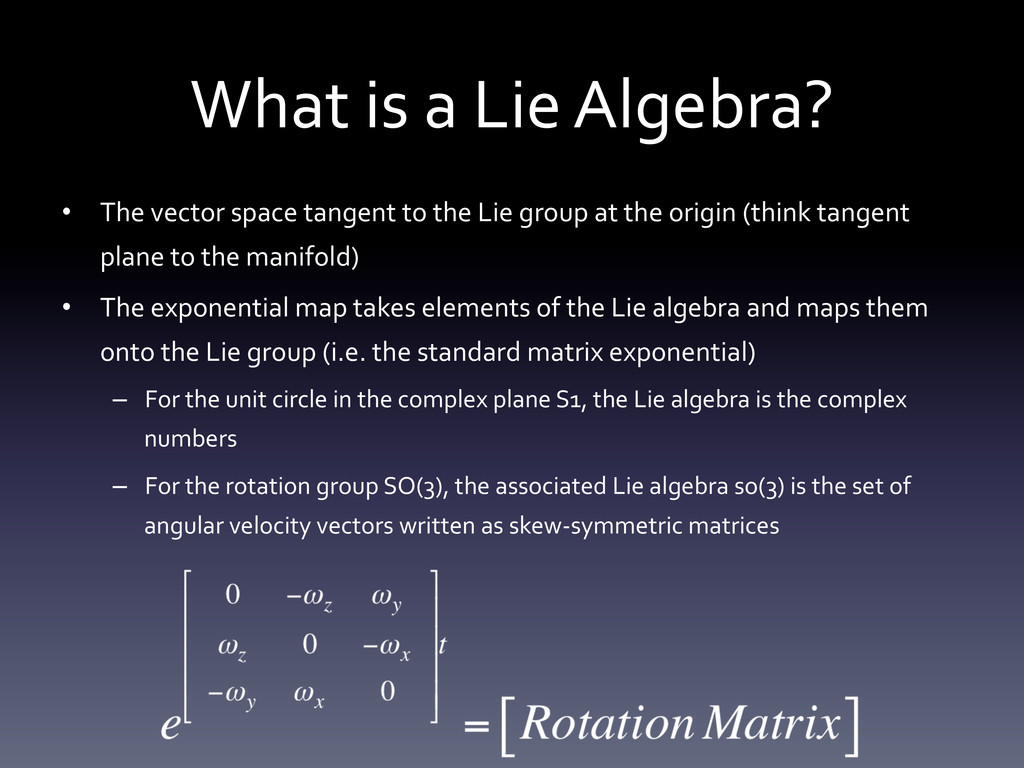
tangent to the Lie group at the origin (think tangent plane to the manifold) • The exponential map takes elements of the Lie algebra and maps them onto the Lie group (i.e. the standard matrix exponential) – For the unit circle in the complex plane S1, the Lie algebra is the complex numbers – For the rotation group SO(3), the associated Lie algebra so(3) is the set of angular velocity vectors written as skew-‐symmetric matrices
numerical integrators that conserve things like energy and momentum and don’t require normalization tricks – By only using the group operation to propagate the state, we guarantee that the result is also a member of the group • These benefits extend to estimators and controllers as well, and allow a more explicit handling of nonlinearity
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}