Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Physical computing with GPIO Zero - Peterboroug...
Search
Ben Nuttall
November 28, 2015
Programming
780
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Physical computing with GPIO Zero - Peterborough Raspberry Jam
Getting started with GPIO Zero talk given at Peterborough Raspberry Jam
Ben Nuttall
November 28, 2015
More Decks by Ben Nuttall
See All by Ben Nuttall
Numeronyms are obnoxious
bennuttall
0
510
Live Highlights in BBC iPlayer
bennuttall
0
160
Rapid prototyping in BBC News with Python and AWS
bennuttall
0
230
Rapid prototyping in BBC News with Python and AWS
bennuttall
0
170
Running a Python Package Index for Raspberry Pi
bennuttall
0
190
From Acorns to Raspberries
bennuttall
0
170
Innovation in the newsroom
bennuttall
0
220
Innovation in the newsroom - MOS Running Order Manager
bennuttall
0
250
How to market your open source project
bennuttall
0
290
Other Decks in Programming
See All in Programming
Prismを使った型安全な暗号化_関数型まつり2026
_fhhmm
0
130
鹿野さんに聞く!『TypeScriptコードレシピ集』で磨く実践力
tonkotsuboy_com
4
1.1k
そのテスト、説明できますか?~LWテスト戦略FW~のご紹介
nakahara
0
200
エンジニア向け会社紹介/Findy Company Profile
findyinc
6
360k
AI時代の仕事技芸論〜ソフトウェア開発で「遊ぶように働く」職人的熟達のすすめ(スクフェス仙台 2026バージョン)
kuranuki
0
630
【やさしく解説 設計編・中級 #6】良いアーキテクチャとは ~ 一本の登り道の、行き先 ~
panda728
PRO
0
160
初めてのKubernetes 本番運用でハマった話
oku053
0
120
技術記事、 専門家としてのプログラマ、 言語化
mizchi
14
7.5k
ルールを書いて終わらせないハーネスエンジニアリング
yug1224
2
1.3k
霧の中の代数的エフェクト
funnyycat
1
370
Generative UI & AI-Assistants for Your Angular Solutions
manfredsteyer
PRO
0
110
音楽のための関数型プログラミング言語mimiumにおける多段階計算の活用
tomoyanonymous
1
320
Featured
See All Featured
The B2B funnel & how to create a winning content strategy
katarinadahlin
PRO
1
420
What the history of the web can teach us about the future of AI
inesmontani
PRO
1
630
How to build an LLM SEO readiness audit: a practical framework
nmsamuel
1
800
RailsConf & Balkan Ruby 2019: The Past, Present, and Future of Rails at GitHub
eileencodes
141
35k
ReactJS: Keep Simple. Everything can be a component!
pedronauck
666
130k
Making Projects Easy
brettharned
120
6.7k
Dealing with People You Can't Stand - Big Design 2015
cassininazir
367
27k
Building Adaptive Systems
keathley
44
3.1k
Color Theory Basics | Prateek | Gurzu
gurzu
0
390
Practical Orchestrator
shlominoach
191
11k
The Pragmatic Product Professional
lauravandoore
37
7.4k
Highjacked: Video Game Concept Design
rkendrick25
PRO
1
410
Transcript
Physical computing with GPIO Zero Ben Nuttall Raspberry Pi Foundation
UK Charity 1129409
Ben Nuttall • Education Developer Advocate at the Raspberry Pi
Foundation – Software & project development – Learning resources & teacher training – Outreach • Hobbyist turned employee • Based in Cambridge (but from the North) • @ben_nuttall on Twitter
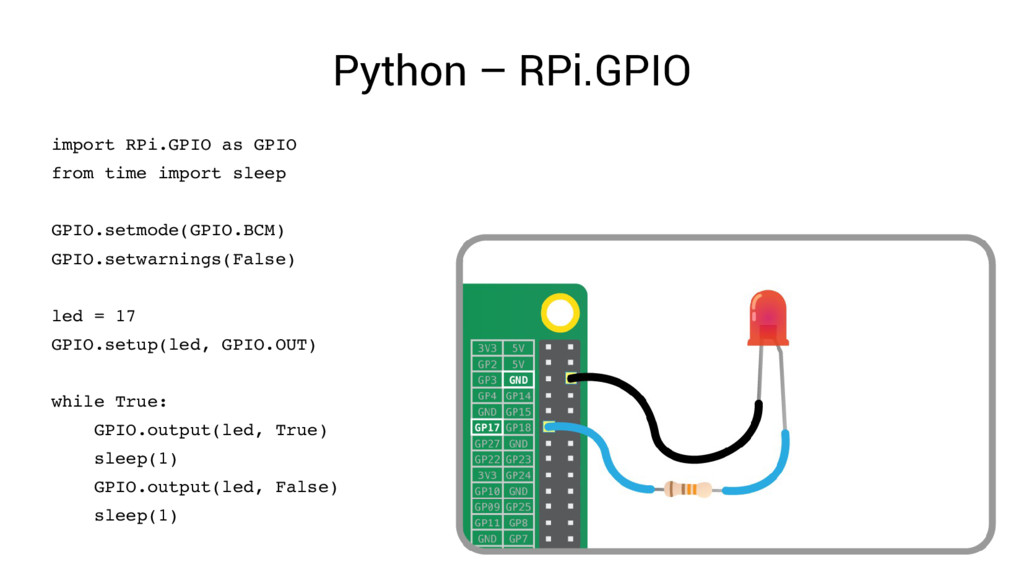
Python – RPi.GPIO import RPi.GPIO as GPIO from time import
sleep GPIO.setmode(GPIO.BCM) GPIO.setwarnings(False) led = 17 GPIO.setup(led, GPIO.OUT) while True: GPIO.output(led, True) sleep(1) GPIO.output(led, False) sleep(1)
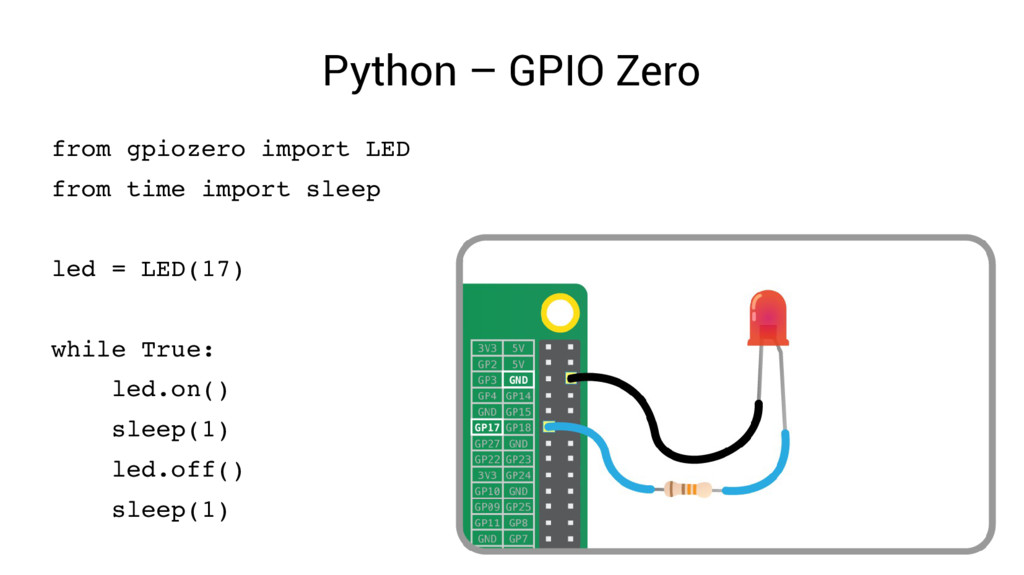
Python – GPIO Zero from gpiozero import LED from time
import sleep led = LED(17) while True: led.on() sleep(1) led.off() sleep(1)
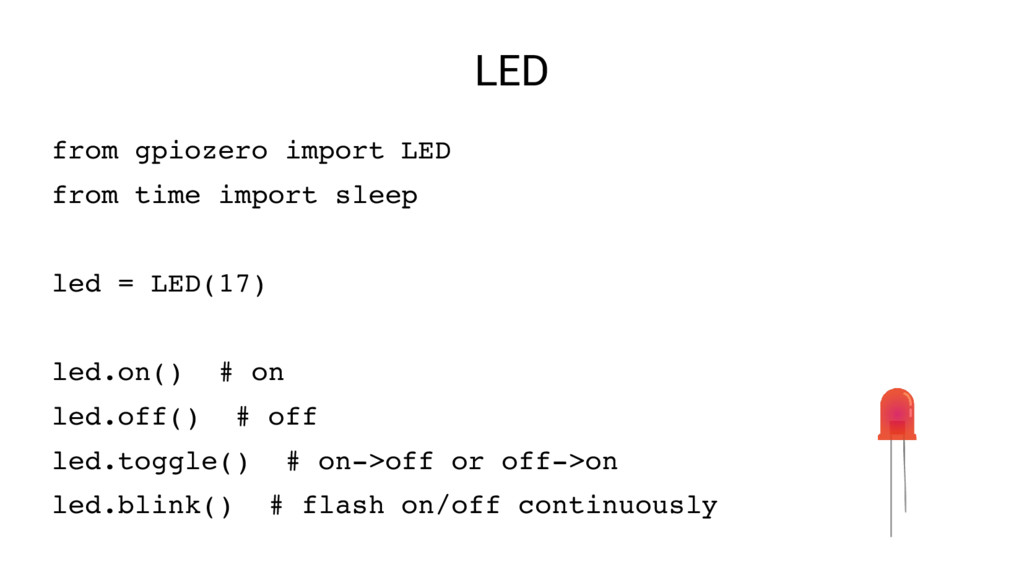
LED from gpiozero import LED from time import sleep led
= LED(17) led.on() # on led.off() # off led.toggle() # on>off or off>on led.blink() # flash on/off continuously
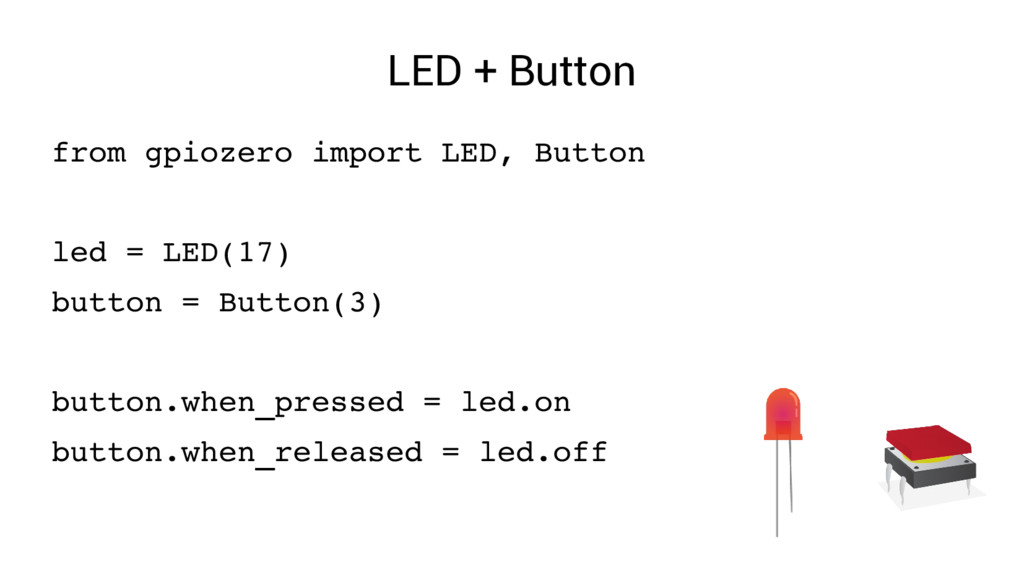
LED + Button from gpiozero import LED, Button led =
LED(17) button = Button(3) button.when_pressed = led.on button.when_released = led.off
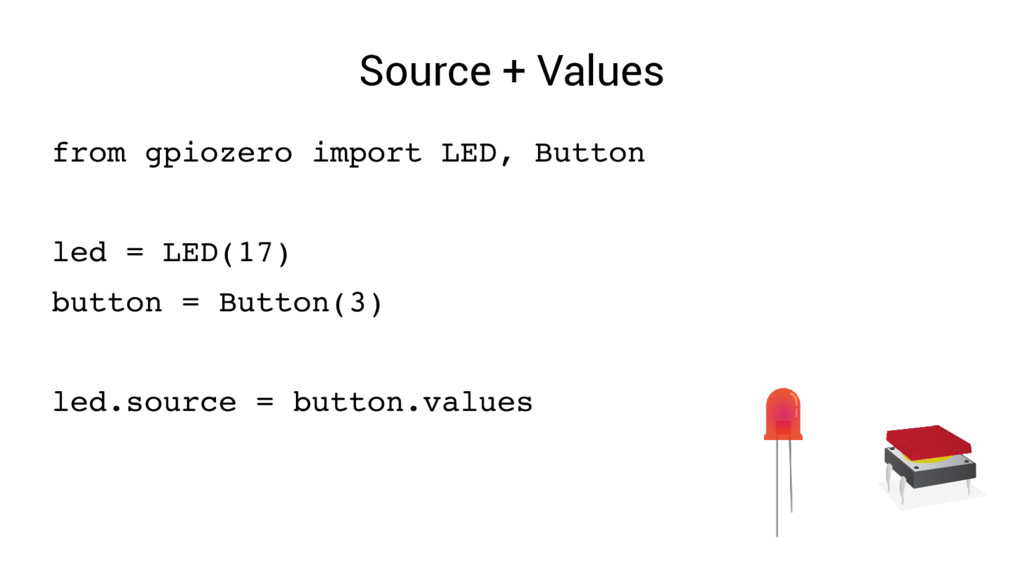
Source + Values from gpiozero import LED, Button led =
LED(17) button = Button(3) led.source = button.values
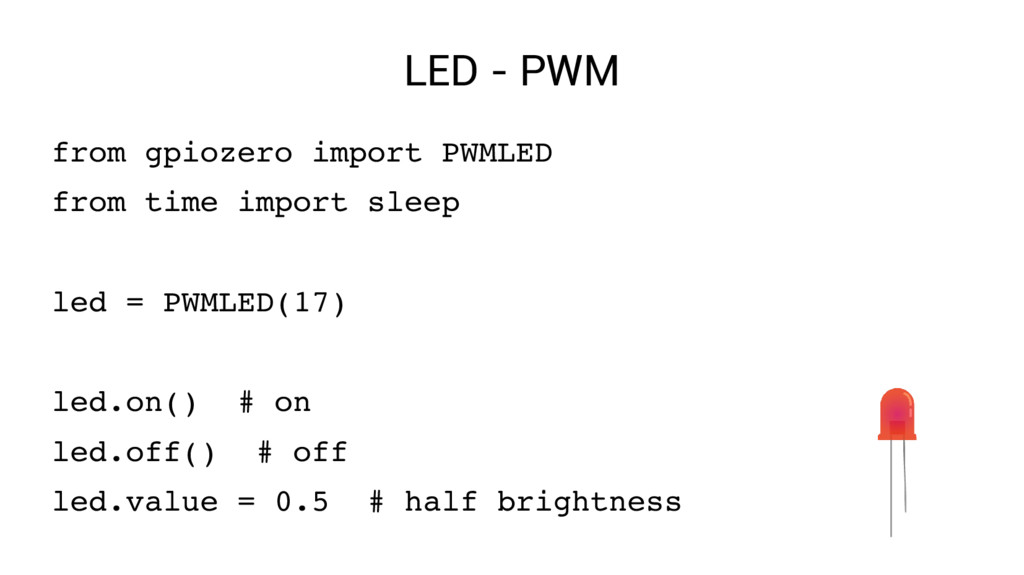
LED - PWM from gpiozero import PWMLED from time import
sleep led = PWMLED(17) led.on() # on led.off() # off led.value = 0.5 # half brightness
Motion sensor from gpiozero import LED, MotionSensor led = LED(2)
sensor = MotionSensor(3) sensor.when_motion = led.on sensor.when_no_motion = led.off
Light sensor from gpiozero import LED, LightSensor led = LED(2)
sensor = LightSensor(3) while True: sensor.wait_for_light() print("It's light!") sensor.wait_for_dark() print("It's dark")
Traffic Lights from gpiozero import TrafficLights lights = TrafficLights(9, 10,
11) lights.on() # all on lights.off() # all off lights.red.on() # red on lights.toggle() # swap state of all lights
Traffic Lights sequence lights.green.on() lights.amber.off() lights.red.off() while True: sleep(10) lights.green.off()
lights.amber.on() sleep(1) lights.amber.off() lights.red.on() sleep(10) lights.amber.on() sleep(1) lights.green.on() lights.amber.off() lights.red.off()
TrafficHat from gpiozero import TrafficHat th = TrafficHat() th.lights.red.on() th.lights.amber.on()
th.button.when_pressed = th.on th.button.when_released = th.off
TrafficHat - PWM from gpiozero import TrafficHat th = TrafficHat(pwm=True)
th.lights.red.value = 0.2 th.lights.amber.value = 0.4 th.lights.green.value = 0.8
Push button stop motion from gpiozero import Button from picamera
import PiCamera button = Button(4) with PiCamera() as camera: camera.start_preview() frame = 1 while True: button.wait_for_press() camera.capture('/home/pi/frame%03d.jpg' % frame) frame += 1
Full colour LED from gpiozero import RGBLED led = RGBLED(2,
3, 4) led.red.on() # full red led.color = (1, 0, 1) # purple led.blue = 0.3 # dim the blue value to 0.3 # now (1, 0, 0.3)
Motor from gpiozero import Motor from time import sleep motor
= Motor(forward=17, backward=18) while True: motor.forward() sleep(5) motor.backward() sleep(5)
Robot from gpiozero import Robot from time import sleep robot
= Robot(left=(17, 18), right=(22, 23)) while True: robot.forward() sleep(10) robot.left() sleep(1)
Button controlled Robot from gpiozero import RyanteckRobot, Button robot =
RyanteckRobot() left = Button(26) right = Button(16) fw = Button(21) bw = Button(20) fw.when_pressed = robot.forward fw.when_released = robot.stop left.when_pressed = robot.left left.when_released = robot.stop right.when_pressed = robot.right right.when_released = robot.stop bw.when_pressed = robot.backward bw.when_released = robot.stop
Analogue - potentiometers from gpiozero import MCP3008 pot = MCP3008()
while True: print(pot.value)
Dial up the brightness! from gpiozero import PWMLED, MCP3008 led
= PWMLED(2) pot = MCP3008() while True: led.value = pot.value
Dial up the brightness! from gpiozero import PWMLED, MCP3008 led
= PWMLED(2) pot = MCP3008() led.source = pot.values
Analogue - potentiometers from gpiozero import RGBLED, MCP3008 led =
RGBLED(red=2, green=3, blue=4) red_pot = MCP3008(channel=0) green_pot = MCP3008(channel=1) blue_pot = MCP3008(channel=2) while True: led.red = red_pot.value led.green = green_pot.value led.blue = blue_pot.value
Analogue - potentiometers from gpiozero import RGBLED, MCP3008 led =
RGBLED(red=2, green=3, blue=4) red_pot = MCP3008(channel=0) green_pot = MCP3008(channel=1) blue_pot = MCP3008(channel=2) led.red.source = red_pot.values led.green.source = green_pot.values led.blue.source = blue_pot.values
GPIO Music Box from gpiozero import Button import pygame.mixer from
pygame.mixer import Sound pygame.mixer.init() sound_pins = { 2: Sound("samples/drum_tom_mid_hard.wav"), 3: Sound("samples/drum_cymbal_open.wav"), } buttons = [Button(pin) for pin in sound_pins] for button in buttons: sound = sound_pins[button.pin] button.when_pressed = sound.play
Install GPIO Zero • Pre-installed in Raspbian Jessie since 21
Nov • Update with: sudo aptget update • Install with: sudo aptget install python3gpiozero or: sudo aptget install pythongpiozero
GPIO Zero • www.pythonhosted.org/gpiozero – Installation instructions – Documentation –
Examples • GitHub Issues – Suggestions – Feedback • Contact me –
[email protected]
– @ben_nuttall on Twitter • #gpiozero on Twitter
CamJam EduKit • £5 starter kit (kit 1) • £7
sensors kit (kit 2) • £17 robotics kit (kit 3) • Free worksheets • Very reusable
Raspberry Pi blog
The MagPi
The MagPi
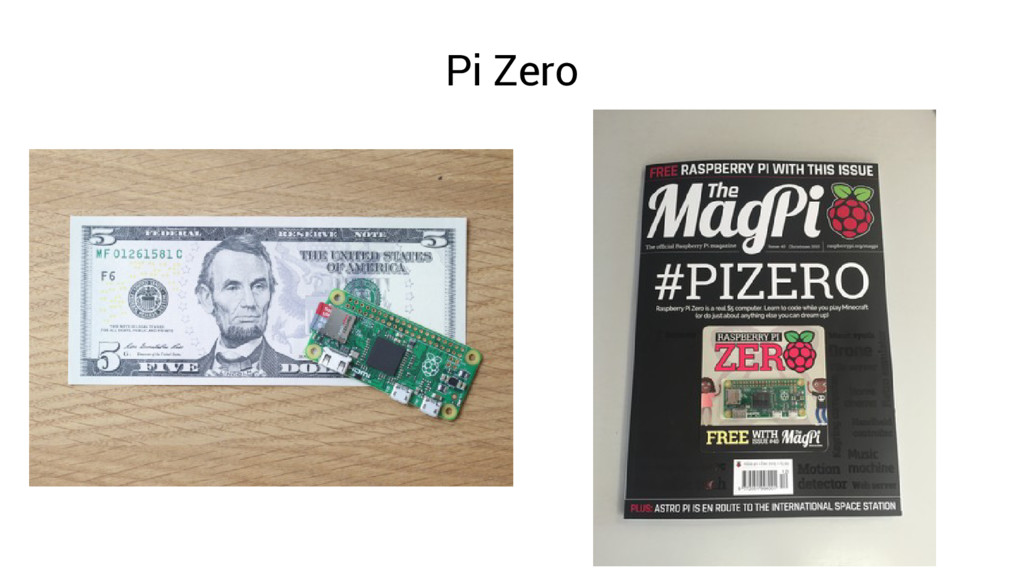
Pi Zero
Conductive paint
Conductive thread
Physical computing with GPIO Zero Ben Nuttall Raspberry Pi Foundation
UK Charity 1129409
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}