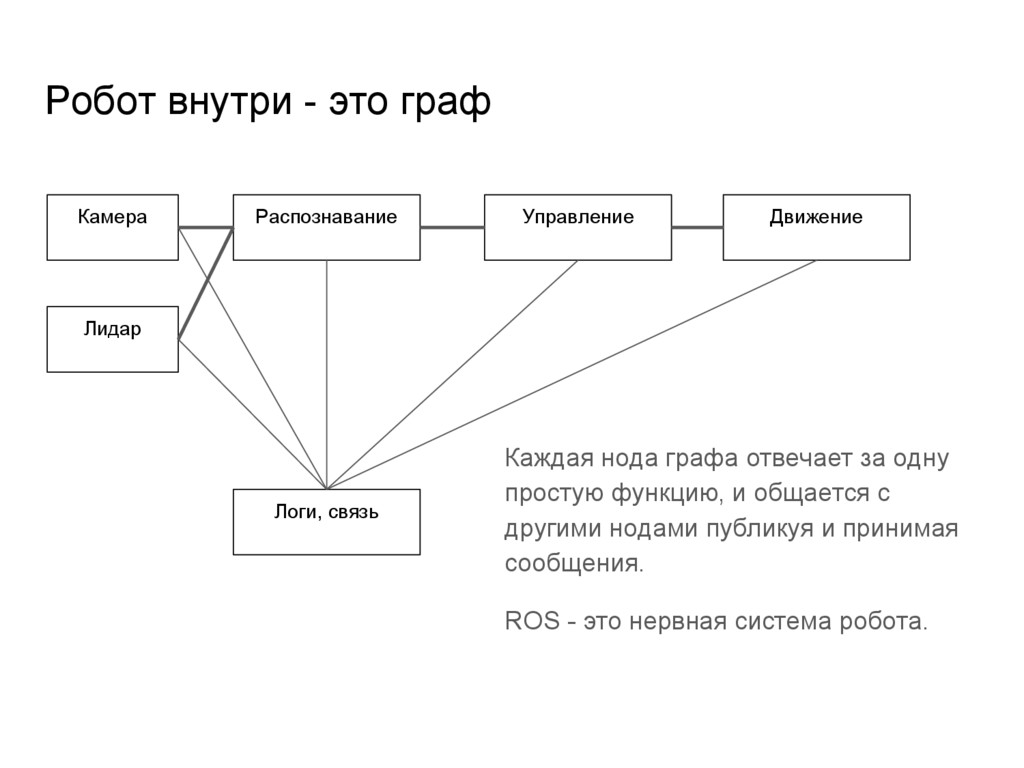
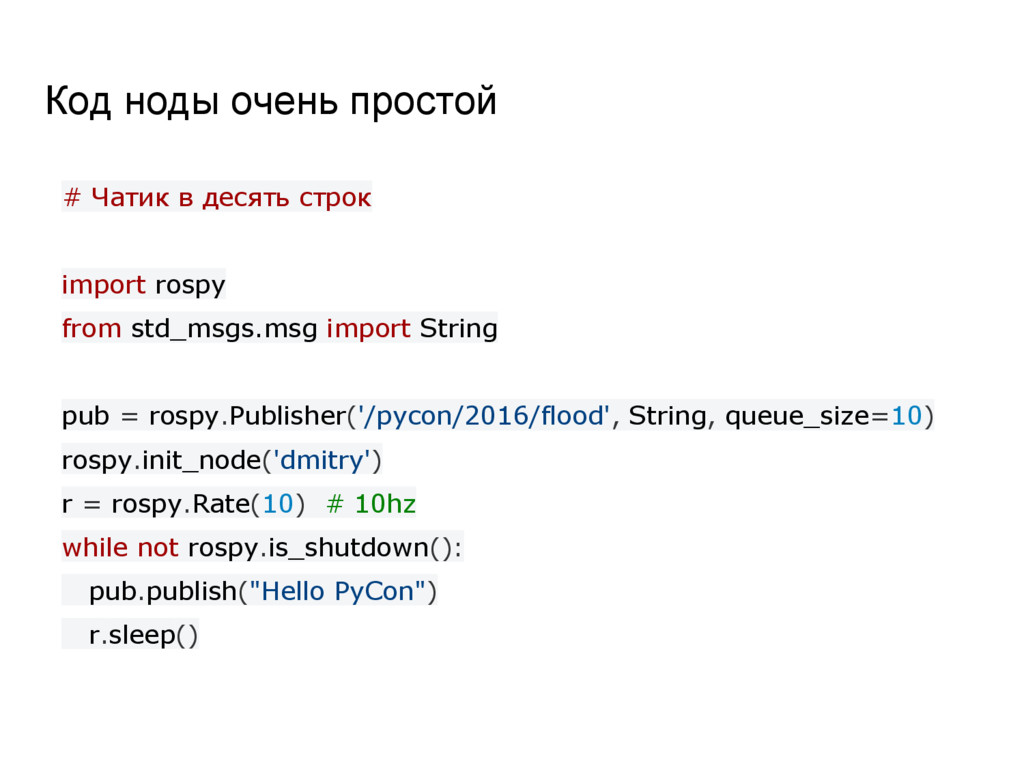
связь Движение Каждая нода графа отвечает за одну простую функцию, и общается с другими нодами публикуя и принимая сообщения. ROS - это нервная система робота.
в Лаборатории Искусственного Интеллекта Стэнфордского Университета В 2008 году развитие продолжается в Willow Garage, научно- исследовательском институте/инкубаторе робототехники, совместно с более чем двадцатью сотрудничающими институтами. Ноды (узлы) не знают друг о друге, знают только о топиках. Легко перестроить сеть. Стартуем с определенным лаунч кофигом.
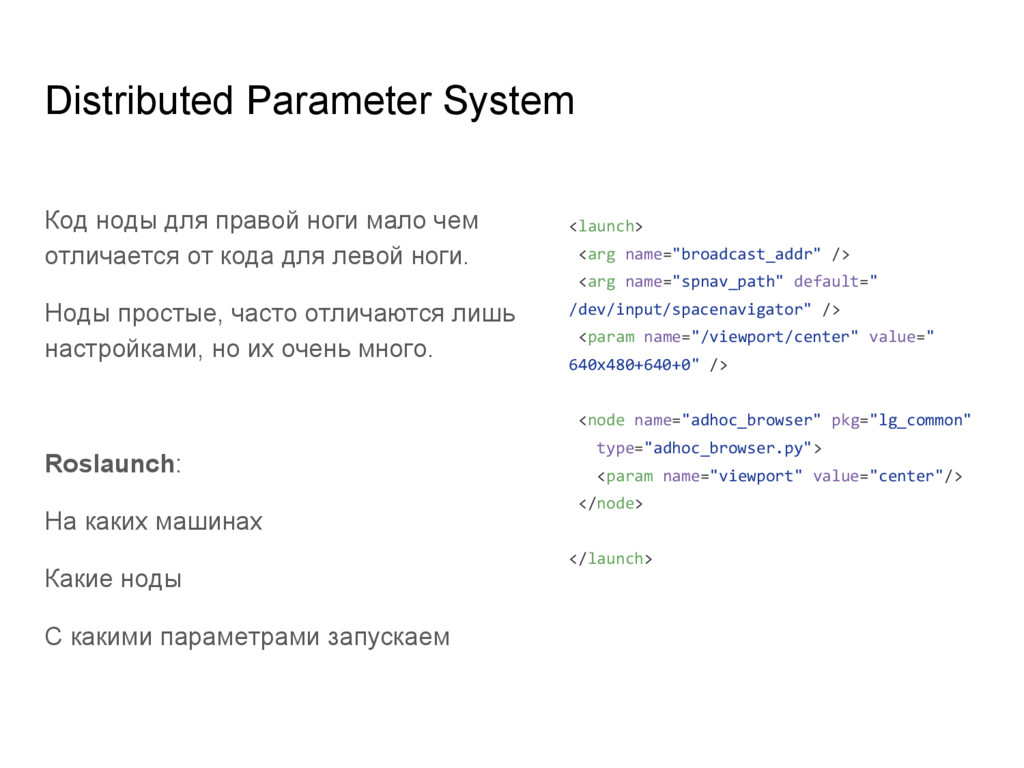
отличается от кода для левой ноги. Ноды простые, часто отличаются лишь настройками, но их очень много. Roslaunch: На каких машинах Какие ноды С какими параметрами запускаем <launch> <arg name="broadcast_addr" /> <arg name="spnav_path" default=" /dev/input/spacenavigator" /> <param name="/viewport/center" value=" 640x480+640+0" /> <node name="adhoc_browser" pkg="lg_common" type="adhoc_browser.py"> <param name="viewport" value="center"/> </node> </launch>
поэтому есть множество уже готовых нод • С catkin_make - легко собрать обычные deb пакеты • Можно использовать C++, Python, Java, Javascript • Есть куча уже написанных нод http://www.ros. org/browse/list.php ◦ Тестирование ◦ Видео/Аудио ◦ Драйверы устройств (Kinect, Leap Motion) ◦ Пользовательский интерфейс ◦ Картография/поиск пути ◦ Распознавание образов ◦ Обработка изображений
Официальный сайт http://www.ros.org/ • Вики проекта http://wiki.ros.org/ • Список готовых нод http://www.ros.org/browse/list.php • Документация на ROSLib JS http://wiki.ros.org/roslibjs • Документация на ROSPy http://wiki.ros.org/rospy • Доклады с ежегодной конференции http://roscon.ros.org/
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}