Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
B3勉強会(2015年2月16日)サポートベクターマシン(SVM)
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
MIKAMI-YUKI
February 16, 2015
Education
150
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
B3勉強会(2015年2月16日)サポートベクターマシン(SVM)
MIKAMI-YUKI
February 16, 2015
More Decks by MIKAMI-YUKI
See All by MIKAMI-YUKI
2016年_年次大会_発表資料
mikamiy
0
140
文献紹介_10_意味的類似性と多義解消を用いた文書検索手法
mikamiy
0
350
文献紹介_9_コーパスに基づく動詞の多義解消
mikamiy
0
140
文献紹介_8_単語単位による日本語言語モデルの検討
mikamiy
0
100
文献紹介_7_自動獲得した未知語の読み・文脈情報による仮名漢字変換
mikamiy
0
120
文献紹介_6_複数の言語的特徴を用いた日本語述部の同義判定
mikamiy
0
120
文献紹介_5_マイクロブログにおける感情・コミュニケーション・動作タイプの推定に基づく顔文字の推薦
mikamiy
0
160
文献紹介_4_結合価パターンを用いた仮名漢字変換候補の選択
mikamiy
0
420
文献紹介_3_絵本のテキストを対象とした形態素解析
mikamiy
1
430
Other Decks in Education
See All in Education
Beyond the Prompt: Programming as a Pathway to Statistical Thinking
minecr
0
260
「答えを出す」より「わかる」をつくる
kzkmaeda
1
230
Visionary Initiative: Future Intelligence — Laying the foundations for the future of science, intelligence, and society | Science Tokyo
sciencetokyo
PRO
0
150
[2026前期火5] 論理学(京都大学文学部 前期 第3回)「形式言語と四つのキーワード:メタ・構成・意味論・ハーモニー」
yatabe
0
600
[2026前期火5] 論理学(京都大学文学部 前期 第5回)「 ならばの問題演習・proof net・かつの規則」
yatabe
0
360
良書紹介08_ 頭のいい子がやっているすごいグラフの読み方
bunnchinn3
0
120
BITCOIN : Les fondamentaux !
rlifchitz
0
200
Throw Yourself In! - How I've learned English and What I'm Facing
georgeorge
1
190
Portable & Reproducible Research Environments in the Age of AI Agents
denkiwakame
0
510
プロポーザルを書く技術とアンチパターン/proposal-writing-and-antipatterns
moriyuya
13
3.5k
モブ社員がモブエンジニアを名乗って得られたこと_20260413
masakiokuda
4
560
2026年度春学期 統計学 第10回 分布の推測とは - 標本調査,度数分布と確率分布 (2026. 6. 4)
akiraasano
PRO
0
160
Featured
See All Featured
Practical Tips for Bootstrapping Information Extraction Pipelines
honnibal
25
2k
Cheating the UX When There Is Nothing More to Optimize - PixelPioneers
stephaniewalter
287
14k
Exploring the relationship between traditional SERPs and Gen AI search
raygrieselhuber
PRO
2
4.2k
How GitHub (no longer) Works
holman
316
150k
[Rails World 2023 - Day 1 Closing Keynote] - The Magic of Rails
eileencodes
38
2.9k
Building Flexible Design Systems
yeseniaperezcruz
330
40k
Balancing Empowerment & Direction
lara
6
1.2k
How to Align SEO within the Product Triangle To Get Buy-In & Support - #RIMC
aleyda
2
1.7k
Building Better People: How to give real-time feedback that sticks.
wjessup
370
20k
Leading Effective Engineering Teams in the AI Era
addyosmani
9
2.2k
職位にかかわらず全員がリーダーシップを発揮するチーム作り / Building a team where everyone can demonstrate leadership regardless of position
madoxten
64
56k
The innovator’s Mindset - Leading Through an Era of Exponential Change - McGill University 2025
jdejongh
PRO
1
220
Transcript
長岡技術科学大学 B3 三上侑城 3年勉強会 2015年2月16日 サポートベクターマシン(SVM) 自然言語処理研究室 1
予備知識 x (xの太字): 入力ベクトル ω (ωの太字): 重みベクトル(求める物) 入力xと出力yの組の教師データ 例:(x 1
,y 1 ) , (x 2 ,y 2 ) y i =1の時は0より大きい値を指す。 y i =-1の時は0より小さい値を指す。 2
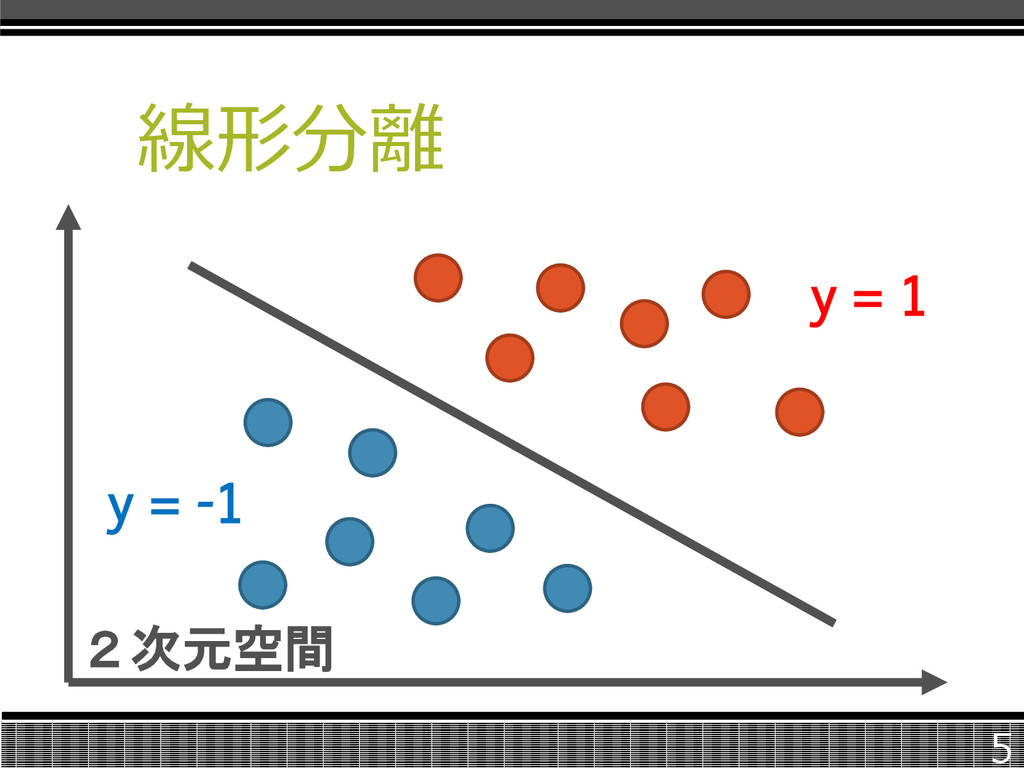
線形分離 空間を線形(まっすぐ)に分離する。 2次元の場合は平面を直線で分断。 3次元の場合は空間を平面で分断。 4次元以上は分断面が分離超平面と 呼ばれるものになる。 3
線形分離 2次元の時、分離した片方をy=1として、 もう片方をy=-1とする。 学習データを全て正しく識別できる場合、 そのデータのことを線形分離可能であると 言う。 線形分離不可能の時は、非線形分離 を行う。 4
線形分離 5 y = 1 y = -1 2次元空間
サポートベクターマシン(SVM) 線形識別器の1つ。 マージンの最大化と非線形分類を同時 に実現でき、高精度な分類を行うことが できる。 機械学習で分離平面を決める。 6
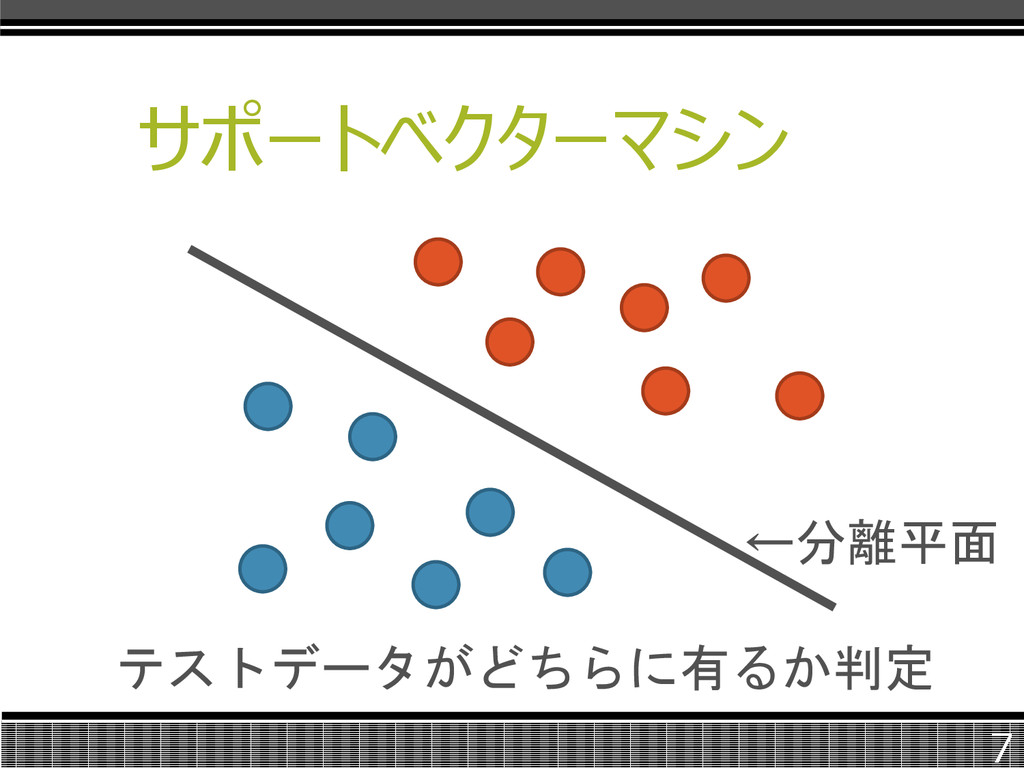
サポートベクターマシン 7 ←分離平面 テストデータがどちらに有るか判定
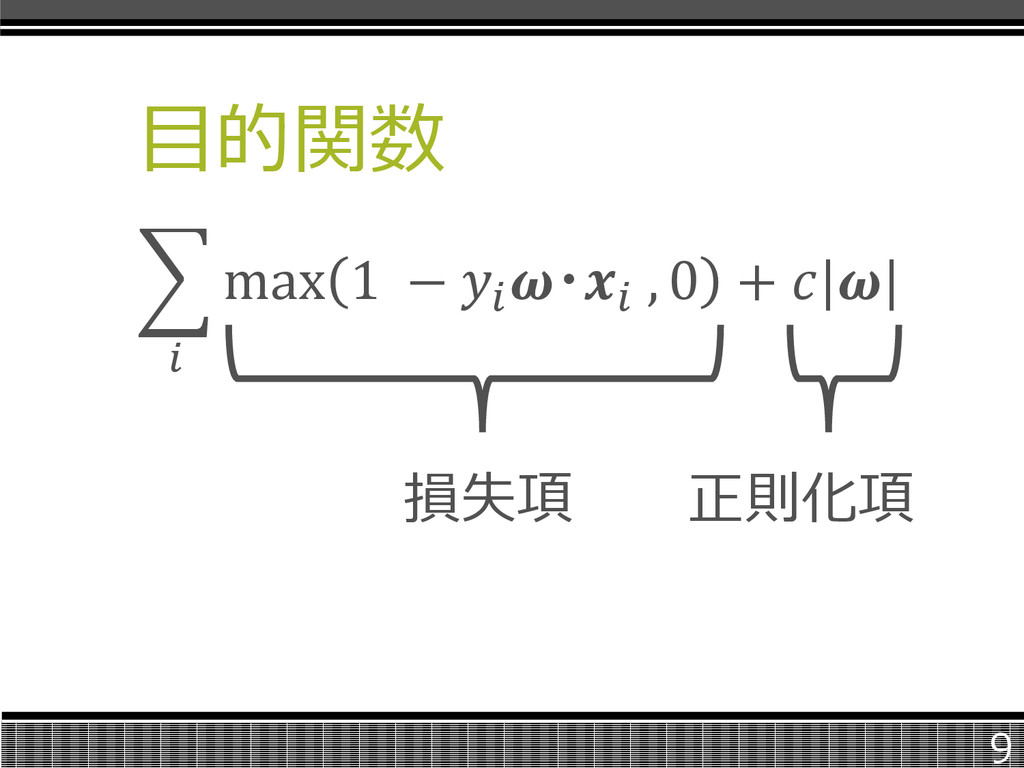
目的関数 目的関数という関数が与えられ、この関 数の値を最小化することが学習の目的と なる。 L1正規化SVM目的関数 max 1 − ・ ,
0 + || ※max(a,b):大きい方の値を返すもの 8
目的関数 max 1 − ・ , 0 + || 損失項
正則化項 9
目的関数 max 1 − ・ , 0 + || 損失項の働き
y i =1(0より大きな値)であるとき、 ω・x i の結果が10とすれば、 1-10=-9となり、0の方が大きくなるため、 損失項の値は0になる。 10
目的関数 max 1 − ・ , 0 + || 損失項の働き
y i =1(0より大きな値)であるとき、 ω・x i の結果が-10とすれば、 1-(-10)=11となり、11の方が大きくな るため、損失項の値は11になる。 11
目的関数 max 1 − ・ , 0 + || 損失項の働き
y i =-1(0より小さい値)であるとき、 ω・x i の結果が-10とすれば、 y i ω・x i は、 1-(10)=-9となり、0の方が大きくなるた め、損失項の値は0になる。 12
目的関数 損失項は ”多くの場合” 、正解した場合 は0で、間違えた場合は0以上の値を取 るようになっている。 つまり、損失項の値が小さいほど、判別 器として性能がいいことが言える。 13
目的関数 ”多くの場合”と言ったが、実は正解した 場合にも損失が0以上になる場合がある。 max 1 − ・ , 0 +
|| ω・x i の結果が1以下の時に0より大き くなる。 14
目的関数 そのため、正解だと判断されず、ωのパラ メータが変更され、結果が最低でも1 (もしくは-1)になる。 -1<y<1の間には何も入らなくなるので、 その間にマージンができる。 → 分離平面が安定する。 15
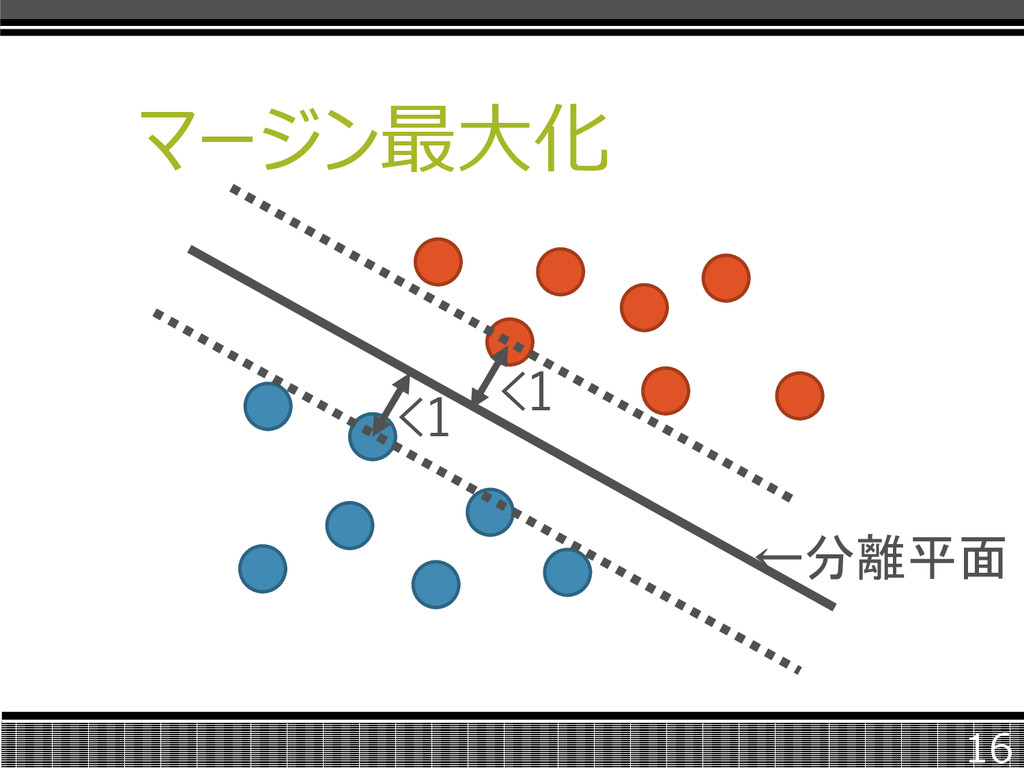
マージン最大化 16 ←分離平面 <1 <1
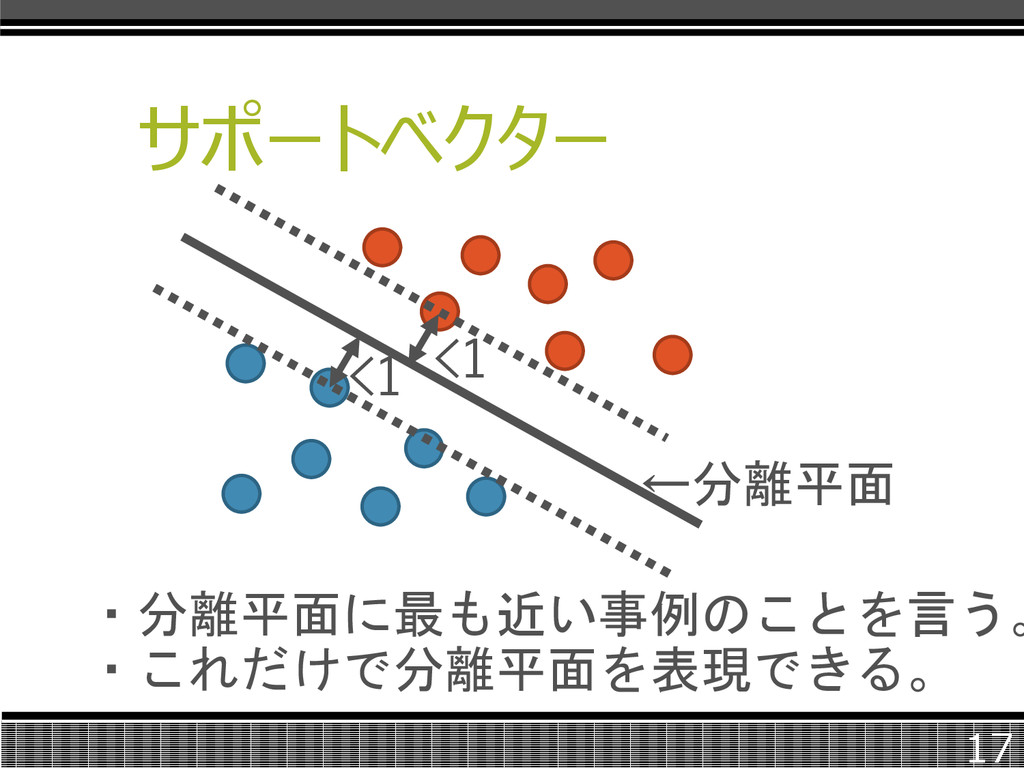
サポートベクター 17 ←分離平面 <1 <1 ・分離平面に最も近い事例のことを言う。 ・これだけで分離平面を表現できる。
正規化項 max 1 − ・ , 0 + || 複雑なモデル(過学習状態)になると、
未知データに対して弱くなることがよくある。 損失項が多少のマイナスでもOKにするこ とで、余裕をもたせることができる。 18
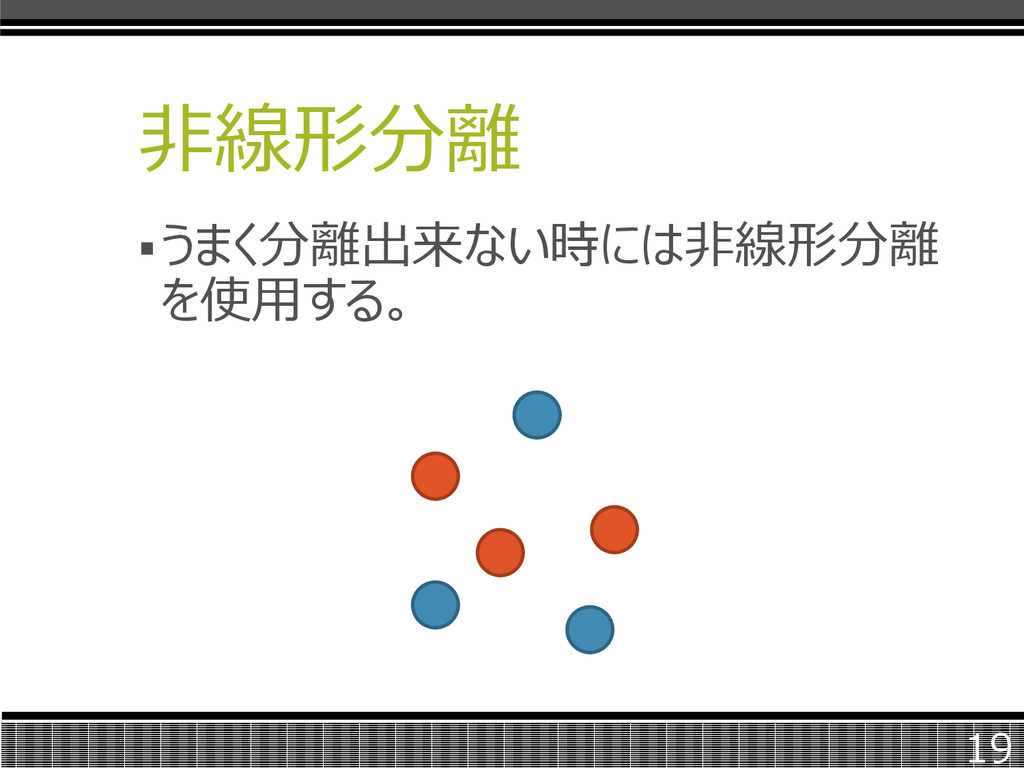
非線形分離 うまく分離出来ない時には非線形分離 を使用する。 19
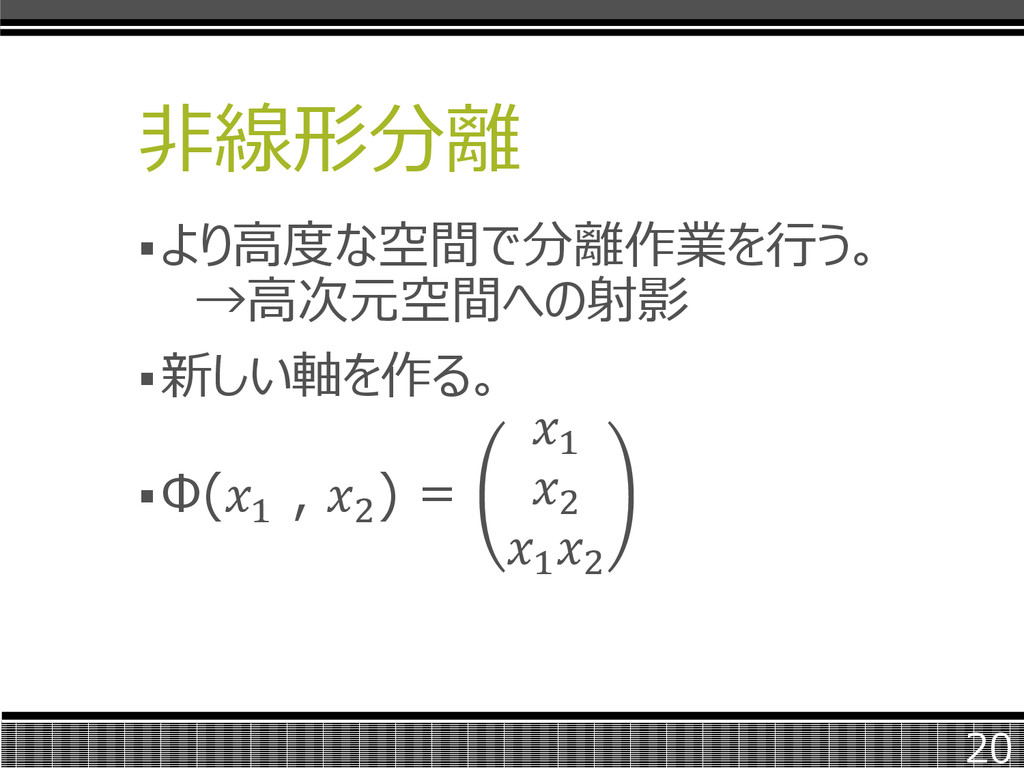
非線形分離 より高度な空間で分離作業を行う。 →高次元空間への射影 新しい軸を作る。 Φ(1 , 2 ) = 1
2 1 2 20
非線形分離 21 2次元空間
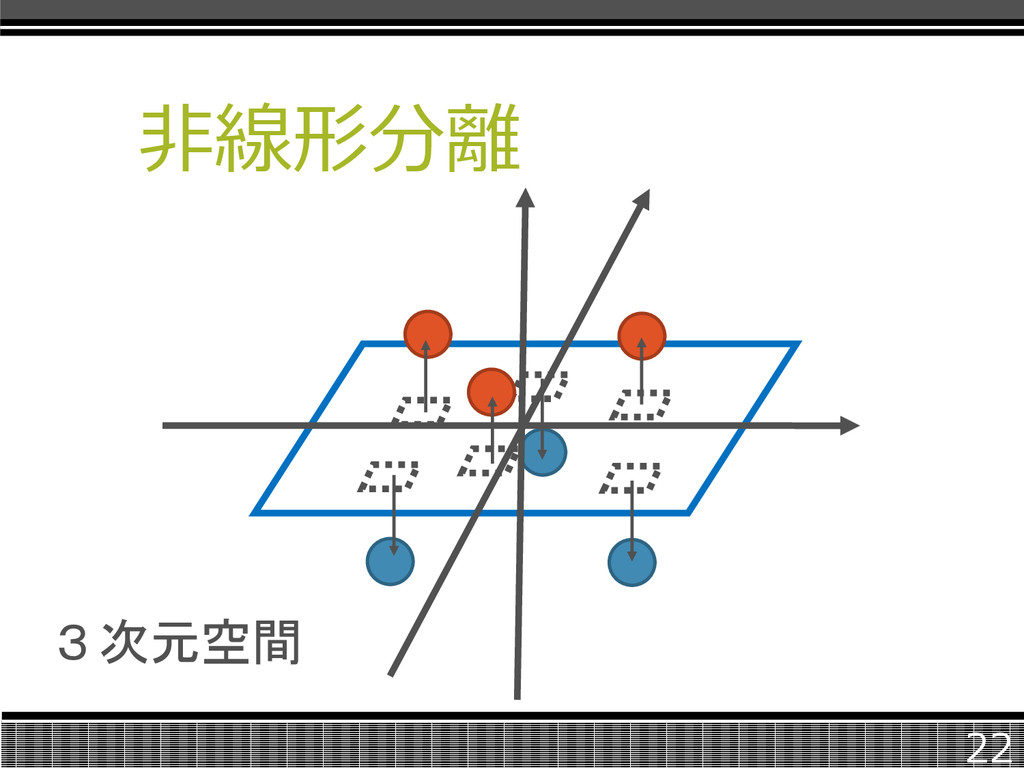
非線形分離 22 3次元空間
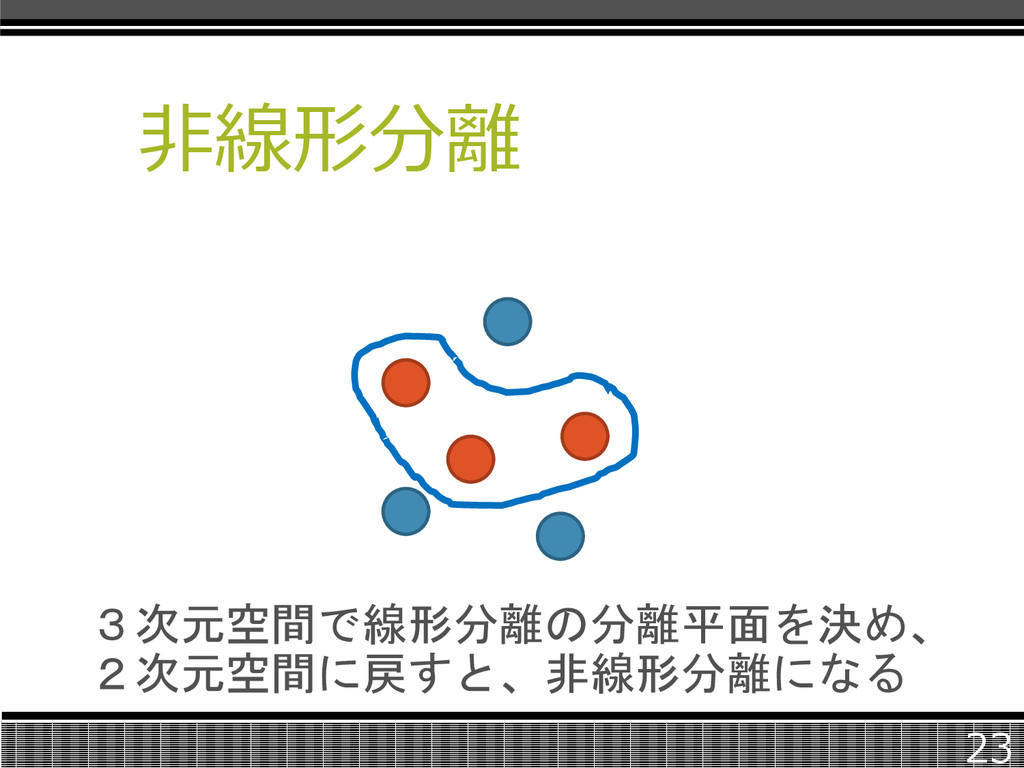
非線形分離 23 3次元空間で線形分離の分離平面を決め、 2次元空間に戻すと、非線形分離になる
収束判定 計算をいつ終えるか?という問題。 完全にパラメータが変化しなくなるまでは 時間が非常にかかる。 実用的には ・十分だと思われる繰り返し(学習)回数 を最初に設定しておく。 ・目的関数の値がほとんど変わらなくなっ たら終了する。 24
ご視聴ありがとうございました 参考文献 ・日本語入力を支える技術 著:徳永拓之 技術評論社 2012年3月 ・機械学習に基づく自然言語処理I 京都大学情報学研究科 黒橋 禎夫
http://nlp.ist.i.kyoto-u.ac.jp/ member/kuro/lecture/LIP10/LIP09.pdf 25
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}