Papadakis2,4 Antonio Baeza2, Aurélie Bugeau2, Olivier D’Hondt2,Pau Gargallo2,3 Xavi Armangué3, Ignasi Rius3, Sergi Sagàs3 1Universitat Pompeu Fabra, 2Barcelona Media, 3Media Pro 4 Institut de Mathématiques de Bordeaux Mathematics for Imaging: the Legacy of Vicent Caselles SIAM IS May 12th 2014 Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.)
a non-profit foundation dedicated to applied research and the transfer of knowledge and technology Since 2007, Vicent was also head of the image group in BarcelonaMedia He has dedicated a lot of his time to a lot of very applied projects Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 2/40
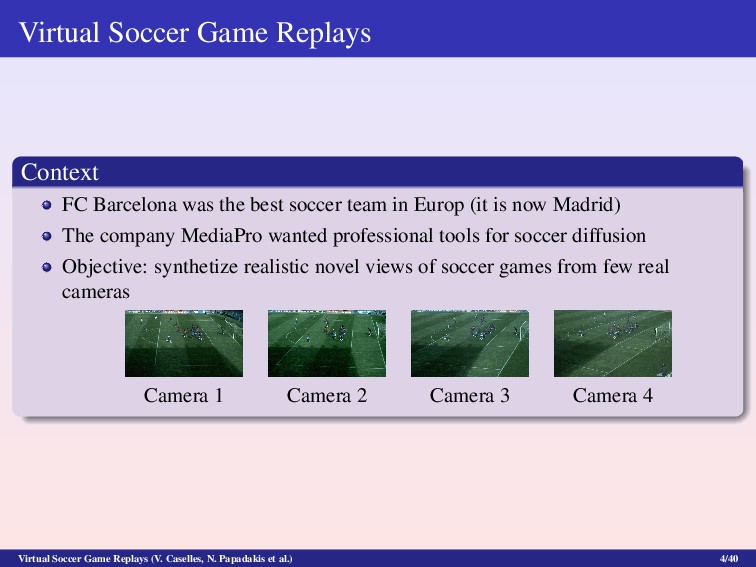
soccer team in Europ (it is now Madrid) The company MediaPro wanted professional tools for soccer diffusion Objective: synthetize realistic novel views of soccer games from few real cameras Camera 1 Camera 2 Camera 3 Camera 4 Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 4/40
(Active Contours) Processing Depth estimation (Total Variation) Virtual image synthesis from a given point of view Post-processing Inpainting of occluded areas Temporal filtering Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 9/40
(Active Contours) Processing Depth estimation (Total Variation) Virtual image synthesis from a given point of view Post-processing Inpainting of occluded areas Temporal filtering Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 9/40
(Active Contours) Processing Depth estimation (Total Variation) Virtual image synthesis from a given point of view Post-processing Inpainting of occluded areas Temporal filtering Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 9/40
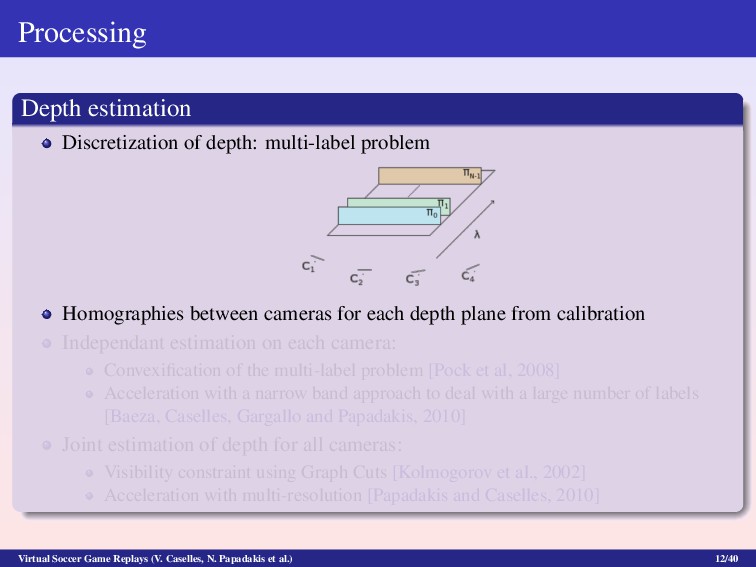
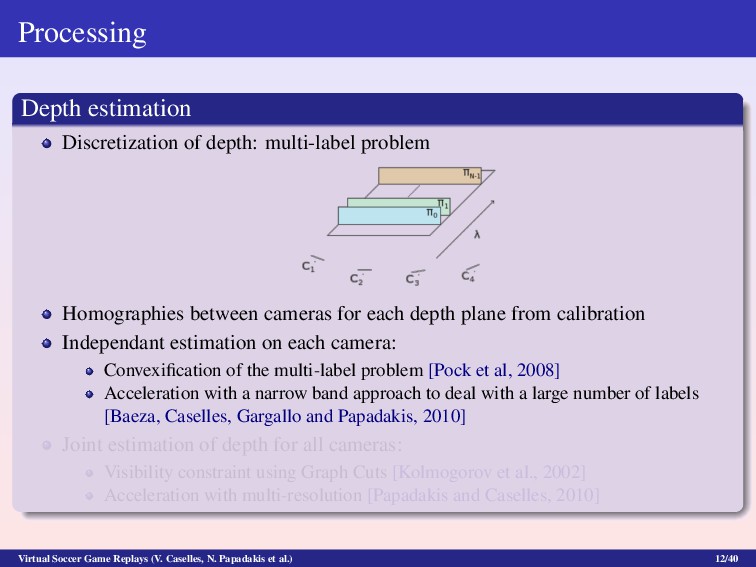
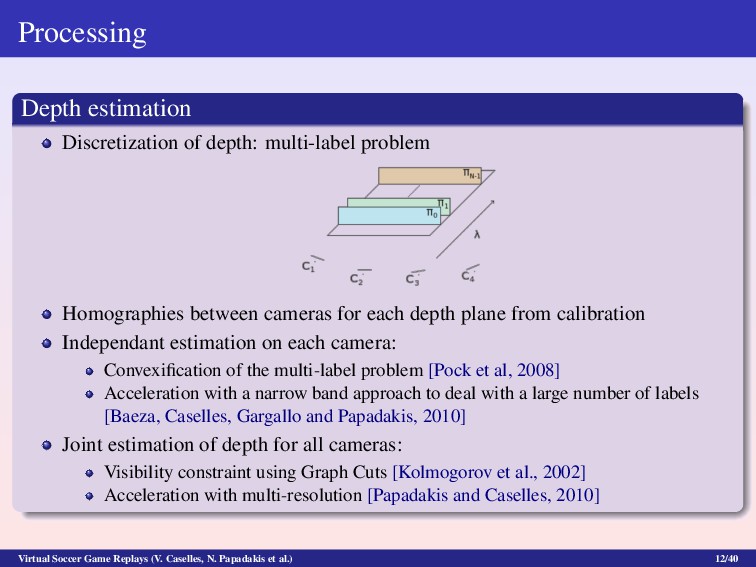
cameras for each depth plane from calibration Independant estimation on each camera: Convexification of the multi-label problem [Pock et al, 2008] Acceleration with a narrow band approach to deal with a large number of labels [Baeza, Caselles, Gargallo and Papadakis, 2010] Joint estimation of depth for all cameras: Visibility constraint using Graph Cuts [Kolmogorov et al., 2002] Acceleration with multi-resolution [Papadakis and Caselles, 2010] Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 12/40
cameras for each depth plane from calibration Independant estimation on each camera: Convexification of the multi-label problem [Pock et al, 2008] Acceleration with a narrow band approach to deal with a large number of labels [Baeza, Caselles, Gargallo and Papadakis, 2010] Joint estimation of depth for all cameras: Visibility constraint using Graph Cuts [Kolmogorov et al., 2002] Acceleration with multi-resolution [Papadakis and Caselles, 2010] Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 12/40
cameras for each depth plane from calibration Independant estimation on each camera: Convexification of the multi-label problem [Pock et al, 2008] Acceleration with a narrow band approach to deal with a large number of labels [Baeza, Caselles, Gargallo and Papadakis, 2010] Joint estimation of depth for all cameras: Visibility constraint using Graph Cuts [Kolmogorov et al., 2002] Acceleration with multi-resolution [Papadakis and Caselles, 2010] Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 12/40
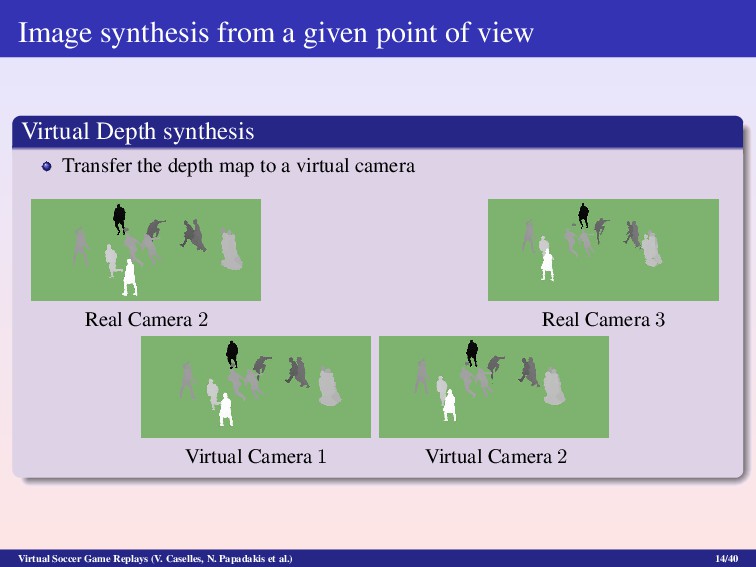
synthesis Transfer the depth map to a virtual camera Real Camera 2 Real Camera 3 Virtual Camera 1 Virtual Camera 2 Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 14/40
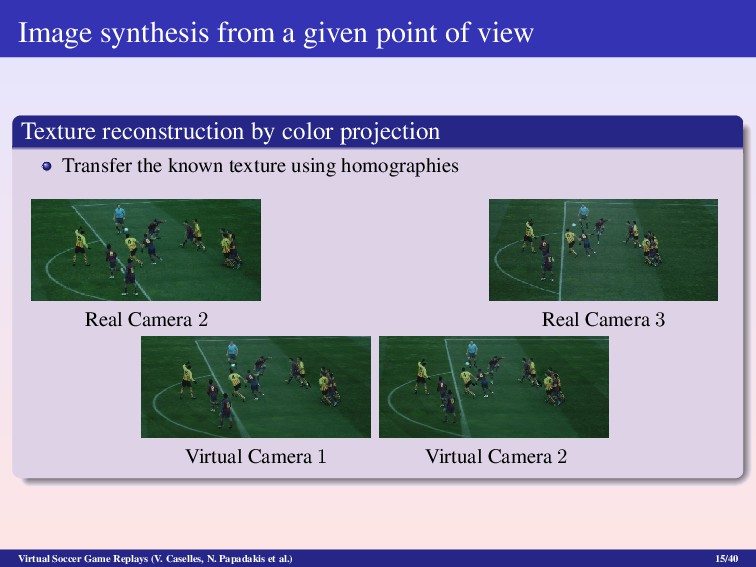
by color projection Transfer the known texture using homographies Real Camera 2 Real Camera 3 Virtual Camera 1 Virtual Camera 2 Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 15/40
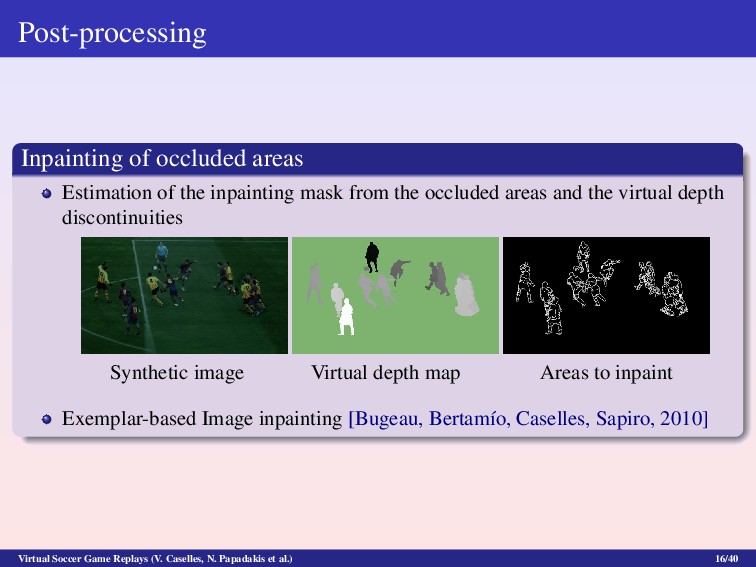
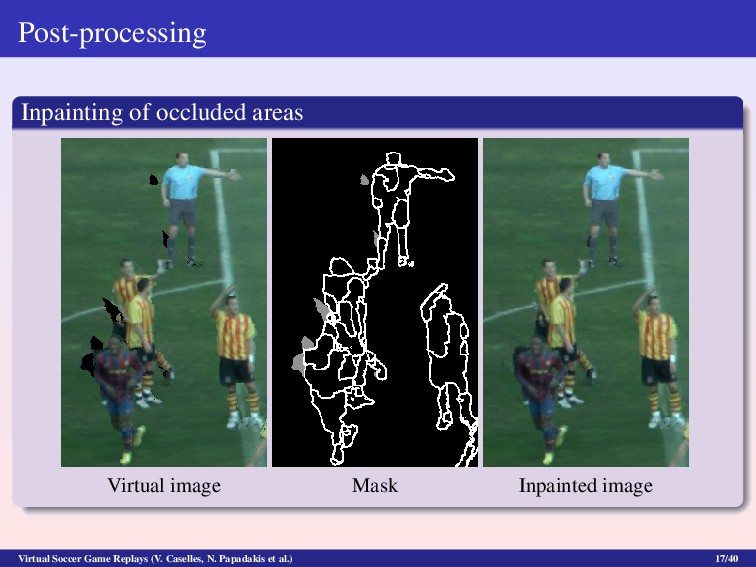
from the occluded areas and the virtual depth discontinuities Synthetic image Virtual depth map Areas to inpaint Exemplar-based Image inpainting [Bugeau, Bertamío, Caselles, Sapiro, 2010] Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 16/40
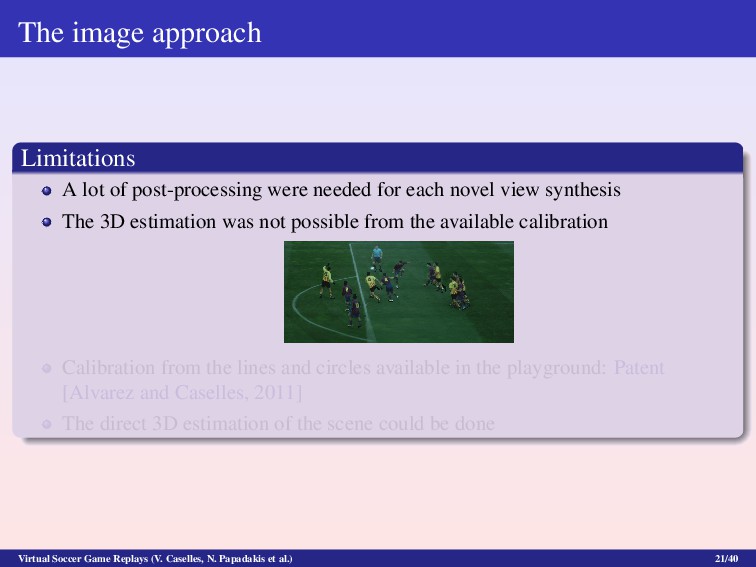
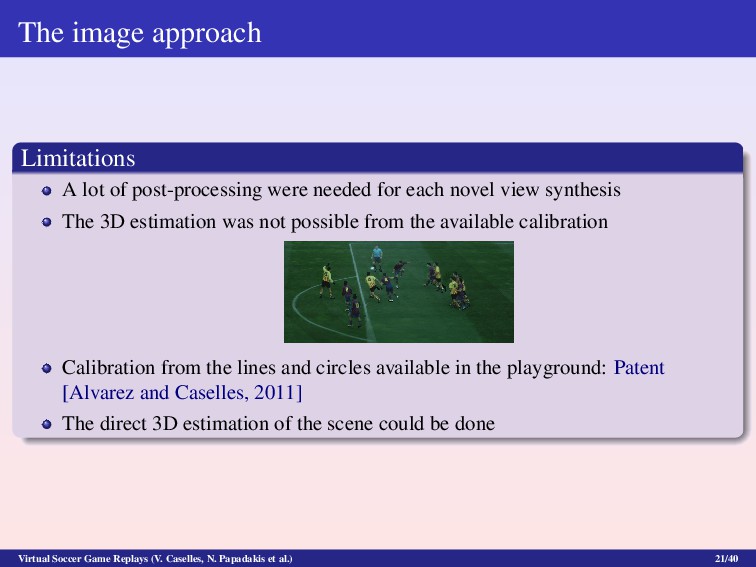
for each novel view synthesis The 3D estimation was not possible from the available calibration Calibration from the lines and circles available in the playground: Patent [Alvarez and Caselles, 2011] The direct 3D estimation of the scene could be done Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 21/40
for each novel view synthesis The 3D estimation was not possible from the available calibration Calibration from the lines and circles available in the playground: Patent [Alvarez and Caselles, 2011] The direct 3D estimation of the scene could be done Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 21/40
(Active Contours) Processing Independant depth estimation with plane sweep [Zach et al. 2008] 3D reconstruction with Total Variation Texture reconstruction Inpainting of occluded areas Image synthesis of a given point of view Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 23/40
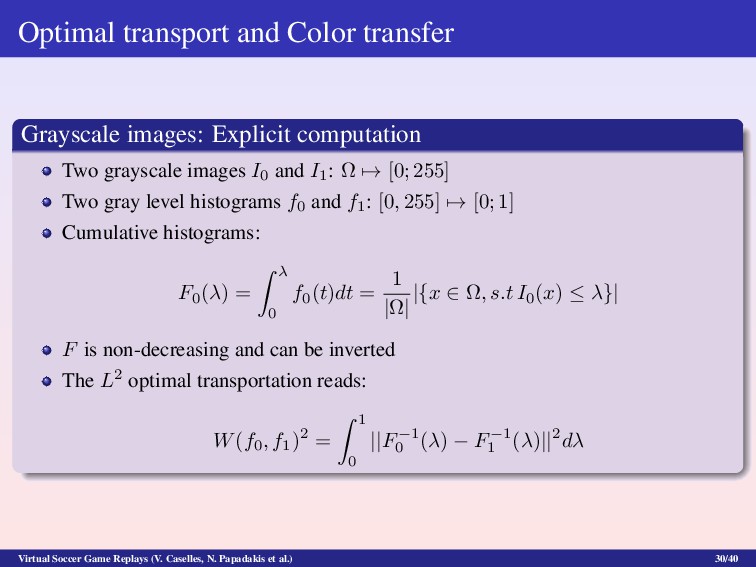
fast parametric transformation of colors is sufficient Color transfer between images f0 and f1 are the color histograms of 2 given images Transfer the colors of one image to the other Find an intermediate color palette Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 28/40
fast parametric transformation of colors is sufficient Color transfer between images f0 and f1 are the color histograms of 2 given images Transfer the colors of one image to the other Find an intermediate color palette Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 28/40
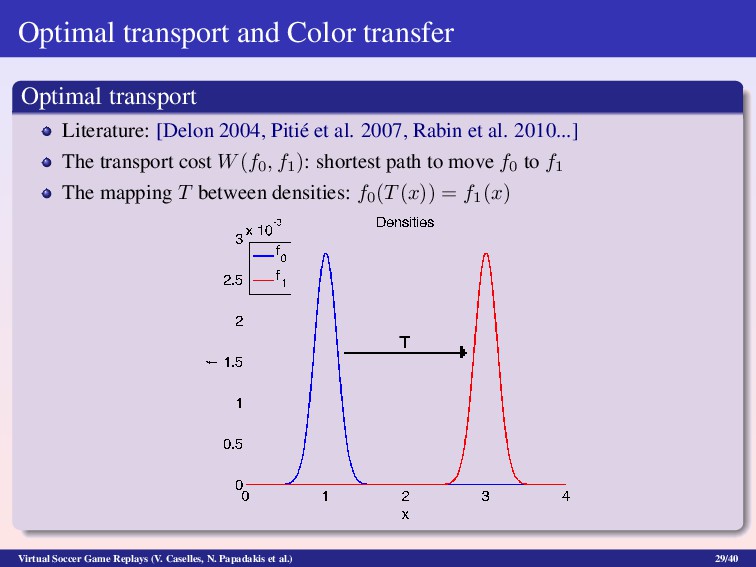
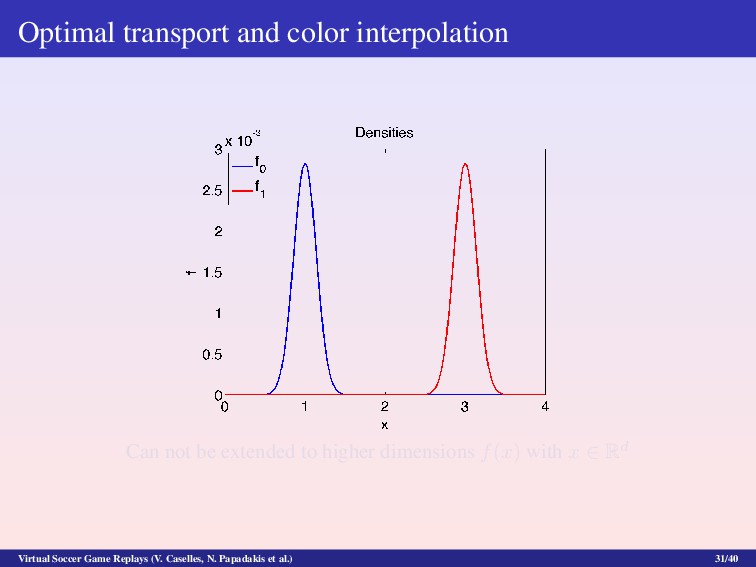
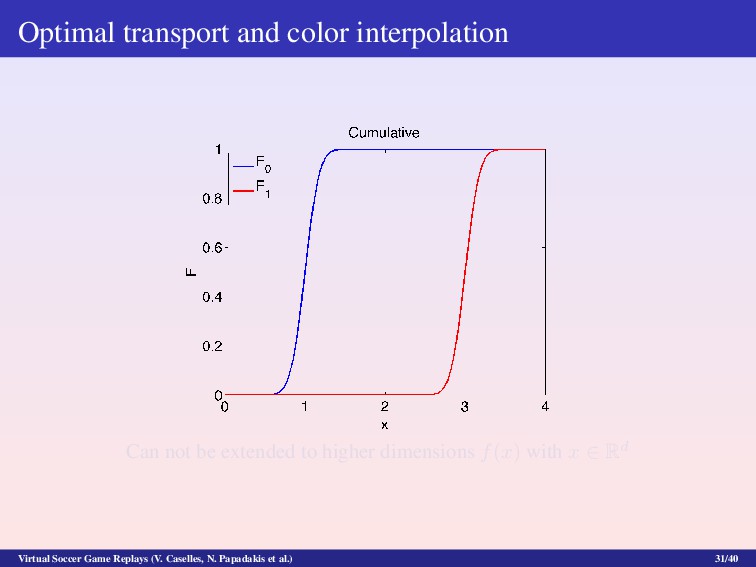
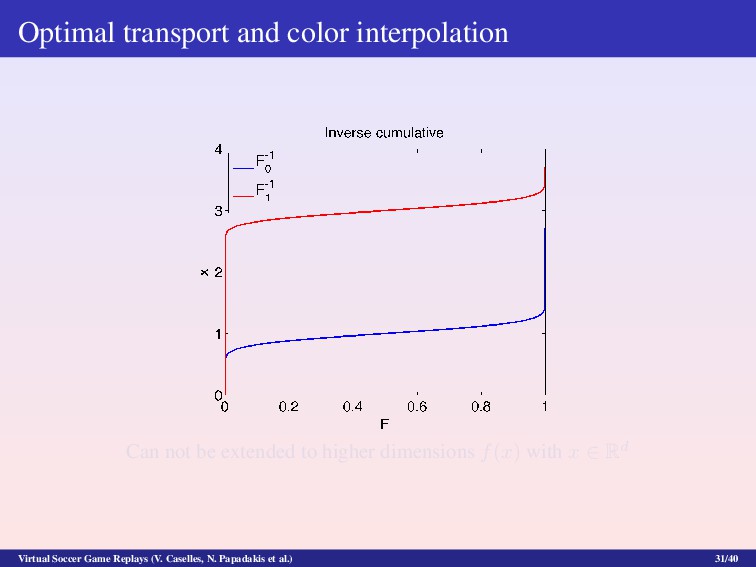
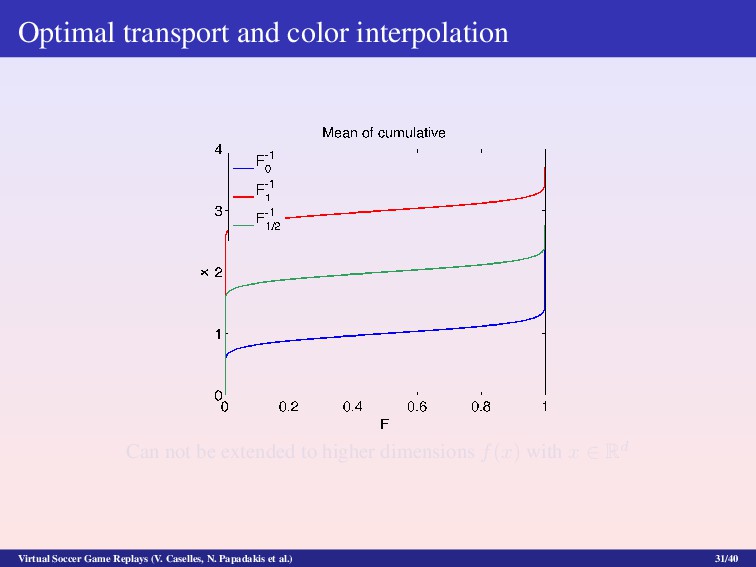
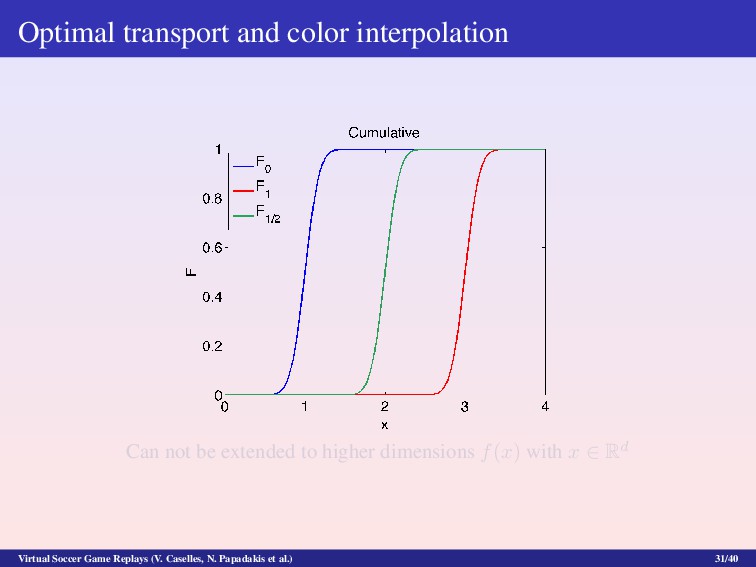
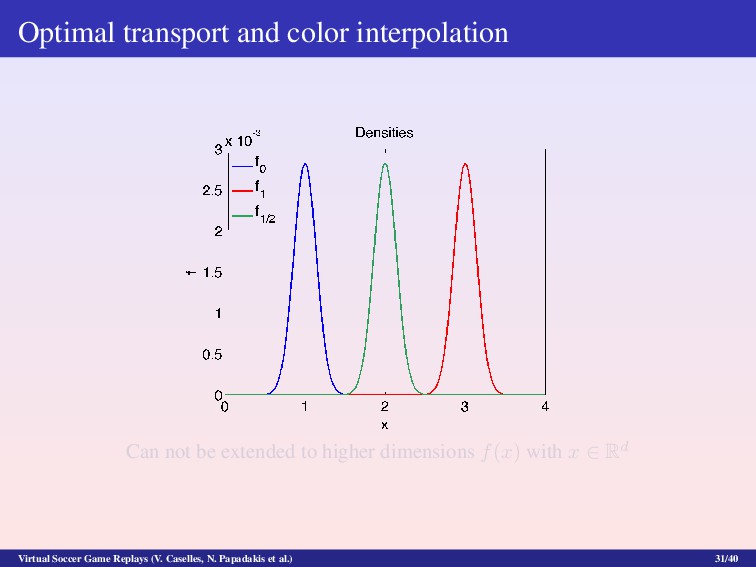
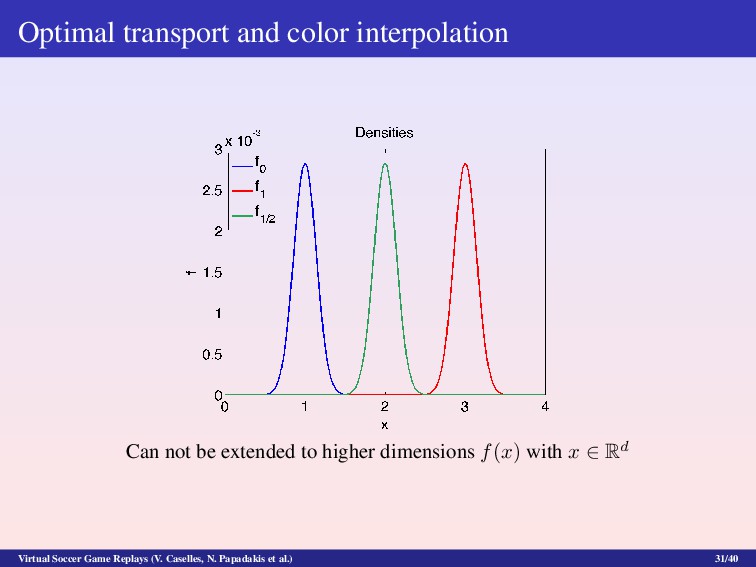
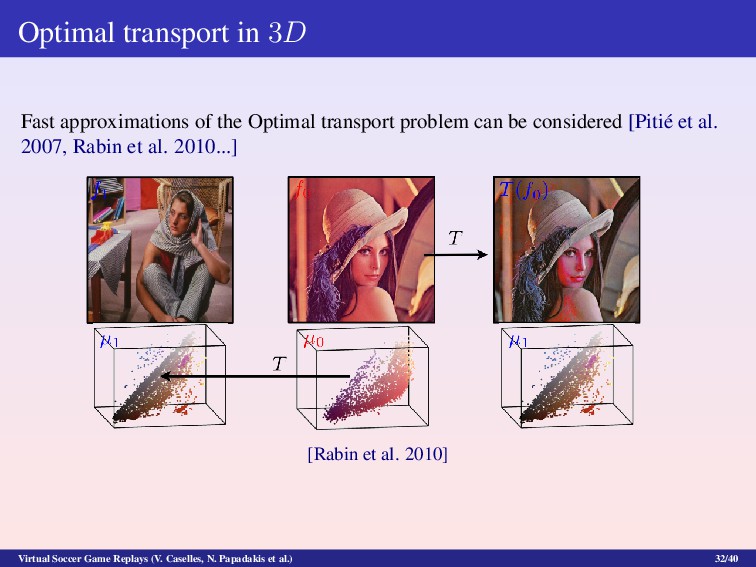
Pitié et al. 2007, Rabin et al. 2010...] The transport cost W(f0 , f1 ): shortest path to move f0 to f1 The mapping T between densities: f0 (T(x)) = f1 (x) Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 29/40
problem can be considered [Pitié et al. 2007, Rabin et al. 2010...] [Rabin et al. 2010] Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 32/40
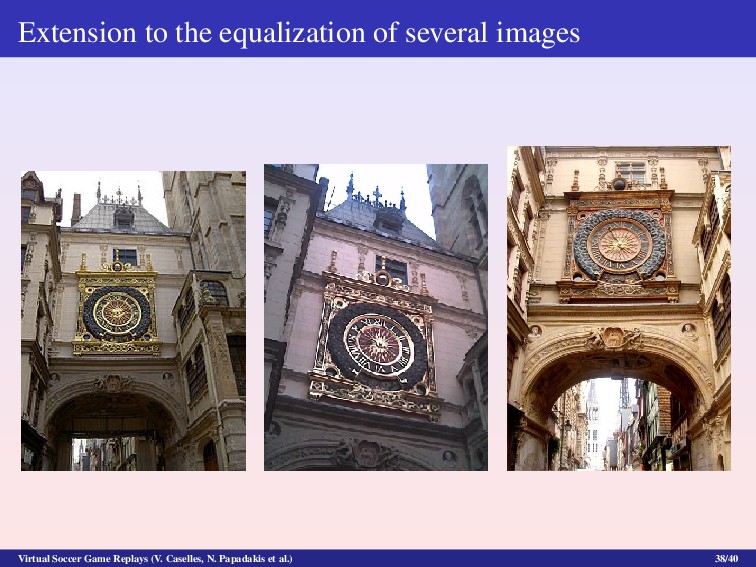
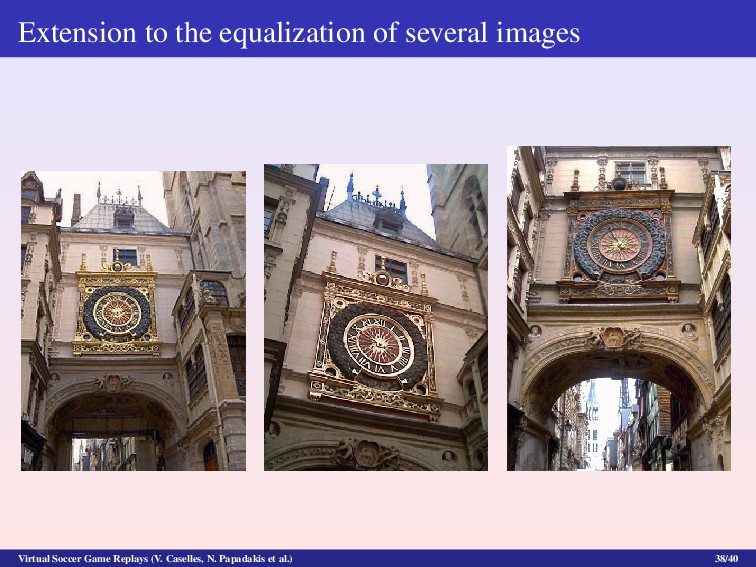
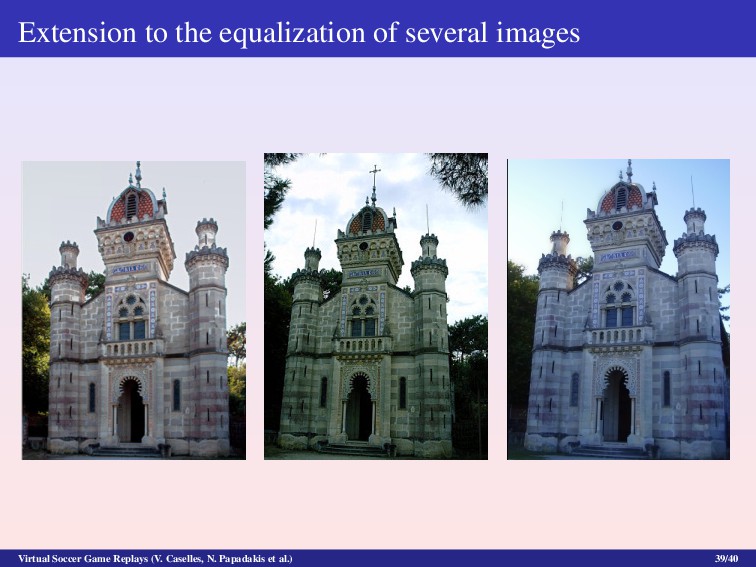
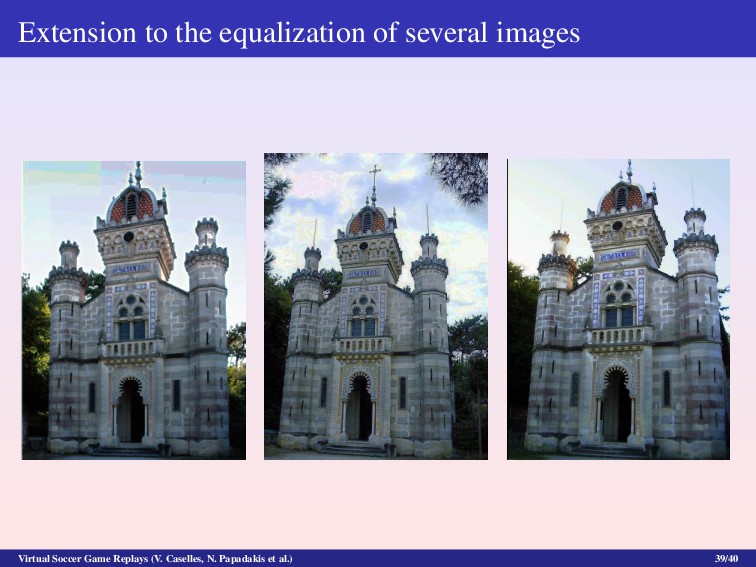
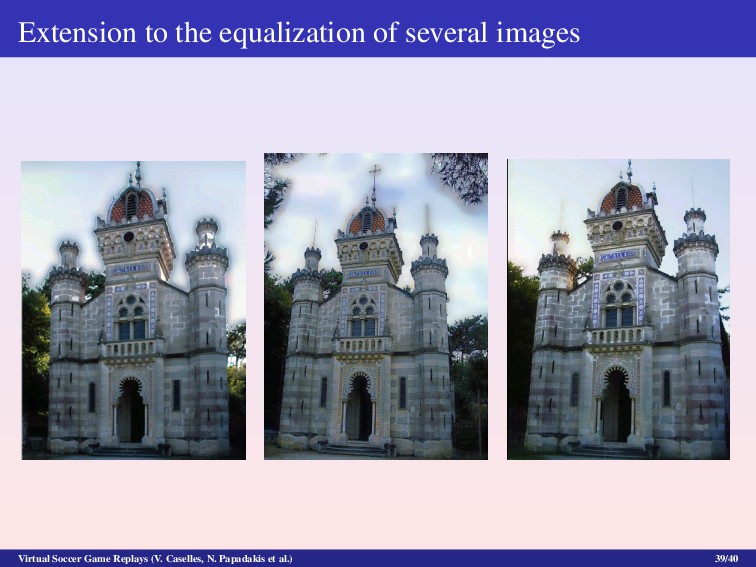
not deal with local content of images: creation of artifacts Post-processing of the image may be nedded Extension to more than 2 images (possible with Wasserstein barycenters [Ferradans, Peyré, Rabin]) Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 33/40
Provenzi) Represent the color distribution of an image I as a function of the pixels of the image F(I) Define a metric between color distributions of two images I and J: d(F(I), F(J)). Use this measure in a variational model where the unknown is the image itself Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 34/40
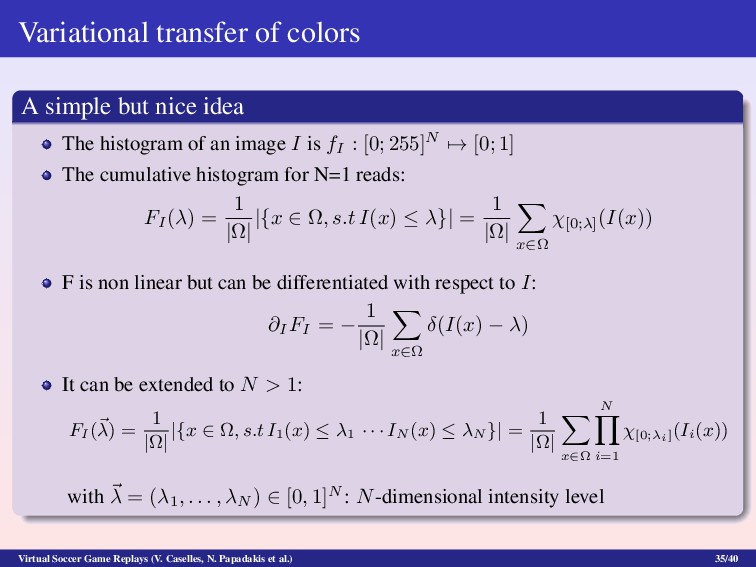
histogram of an image I is fI : [0; 255]N → [0; 1] The cumulative histogram for N=1 reads: FI (λ) = 1 |Ω| |{x ∈ Ω, s.t I(x) ≤ λ}| = 1 |Ω| x∈Ω χ[0;λ] (I(x)) F is non linear but can be differentiated with respect to I: ∂I FI = − 1 |Ω| x∈Ω δ(I(x) − λ) It can be extended to N > 1: FI (λ) = 1 |Ω| |{x ∈ Ω, s.t I1 (x) ≤ λ1 · · · IN (x) ≤ λN }| = 1 |Ω| x∈Ω N i=1 χ[0;λi] (Ii (x)) with λ = (λ1 , . . . , λN ) ∈ [0, 1]N : N-dimensional intensity level Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 35/40
histogram of an image I is fI : [0; 255]N → [0; 1] The cumulative histogram for N=1 reads: FI (λ) = 1 |Ω| |{x ∈ Ω, s.t I(x) ≤ λ}| = 1 |Ω| x∈Ω χ[0;λ] (I(x)) F is non linear but can be differentiated with respect to I: ∂I FI = − 1 |Ω| x∈Ω δ(I(x) − λ) It can be extended to N > 1: FI (λ) = 1 |Ω| |{x ∈ Ω, s.t I1 (x) ≤ λ1 · · · IN (x) ≤ λN }| = 1 |Ω| x∈Ω N i=1 χ[0;λi] (Ii (x)) with λ = (λ1 , . . . , λN ) ∈ [0, 1]N : N-dimensional intensity level Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 35/40
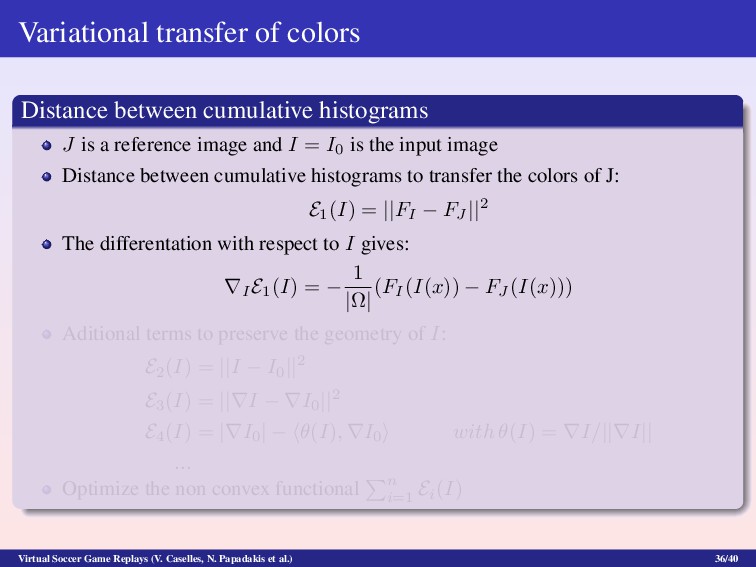
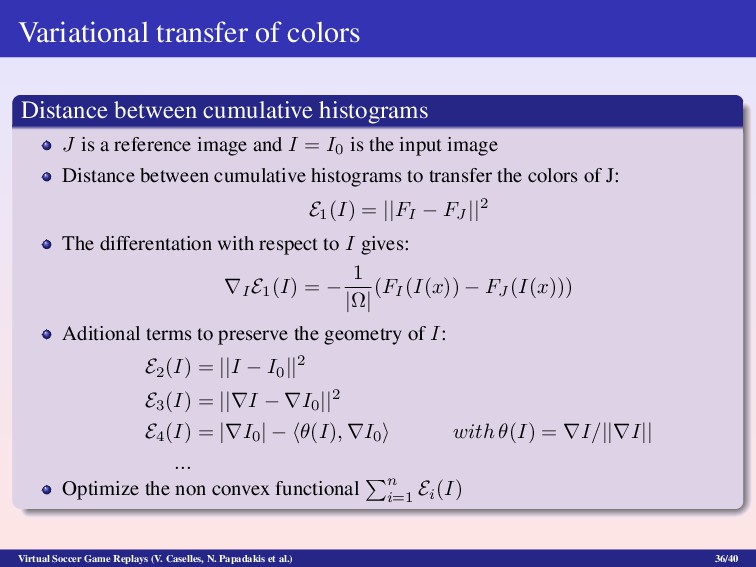
a reference image and I = I0 is the input image Distance between cumulative histograms to transfer the colors of J: E1 (I) = ||FI − FJ ||2 The differentation with respect to I gives: ∇I E1 (I) = − 1 |Ω| (FI (I(x)) − FJ (I(x))) Aditional terms to preserve the geometry of I: E2 (I) = ||I − I0 ||2 E3 (I) = ||∇I − ∇I0 ||2 E4 (I) = |∇I0 | − θ(I), ∇I0 with θ(I) = ∇I/||∇I|| ... Optimize the non convex functional n i=1 Ei (I) Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 36/40
a reference image and I = I0 is the input image Distance between cumulative histograms to transfer the colors of J: E1 (I) = ||FI − FJ ||2 The differentation with respect to I gives: ∇I E1 (I) = − 1 |Ω| (FI (I(x)) − FJ (I(x))) Aditional terms to preserve the geometry of I: E2 (I) = ||I − I0 ||2 E3 (I) = ||∇I − ∇I0 ||2 E4 (I) = |∇I0 | − θ(I), ∇I0 with θ(I) = ∇I/||∇I|| ... Optimize the non convex functional n i=1 Ei (I) Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 36/40
created by compression (unless over regularization) Discretization of the color space Conclusion Nice way to start with the concepts of optimal transport More sophisticated models: Julien Rabin (Wednesday, MS09) Vicent: be interested in every details Mathematics ⇔ Applications Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 40/40
created by compression (unless over regularization) Discretization of the color space Conclusion Nice way to start with the concepts of optimal transport More sophisticated models: Julien Rabin (Wednesday, MS09) Vicent: be interested in every details Mathematics ⇔ Applications Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 40/40
created by compression (unless over regularization) Discretization of the color space Conclusion Nice way to start with the concepts of optimal transport More sophisticated models: Julien Rabin (Wednesday, MS09) Vicent: be interested in every details Mathematics ⇔ Applications Virtual Soccer Game Replays (V. Caselles, N. Papadakis et al.) 40/40
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Illustration Reference image Original image [Pitié et al, 2007] Our](https://files.speakerdeck.com/presentations/3c1022f01b684602ac1b719b3582ef46/slide_53.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}