ℙ ([, ]) é um subespaço ℙ([, ]), o espaço das polinomiais de qualquer grau. 2. ℙ([, ]) é subespaço de ℱ( , ), o espaço de todas as funções : [, ] → ℝ. E aprendi a usar a NumPy para: • Criar polinomiais, usando a base canônica 0 , 1 , ⋯ , de ℙ ([, ]); • Calcular raízes de uma polinomial; • Derivar e integrar polinomiais ∈ ℙ ([, ]); • Etc.
]), o espaço das polinomiais de qualquer grau, tem dimensão infinita, enumerável; • ℱ( , ), o espaço de todas as funções : [, ] → ℝ também tem dimensão infinita; E como toda polinomial é uma função contínua, e infinitamente derivável, concluímos também, que , , 1 , , ⋯ , ∞ , são todos espaços dimensão infinita.
Existem polinomiais de grau infinito Mestra? Claro que não, minha filha. As polinomiais de ℙ([, ]), não possuem restrição de grau. Isto quer, apenas, dizer que o grau poderá ser qualquer número natural, por isso mesmo finito.
fala mais nisso! A sequência ℬ = { 0 , 1 , … , … } das funções polinomiais definidas por = , para ∈ [, ] é uma base (de Hamel) de ℙ( , ), pois: 1. ℬ gera ℙ( , ) – lembrem-se, combinações lineares são somas finitas; 2. ℬ é um subconjunto LI de ℙ , , pois todo ∈ ℕ, os subconjuntos constituídos por n elementos distintos de ℬ é LI.
das polinomiais. As de Chebyshev, Legendre, Laguerre, Hermite. Em todas elas, as funções básicas formam uma sequência de polinomiais cujos graus estão em ordem crescente: 0, 1, 2, …
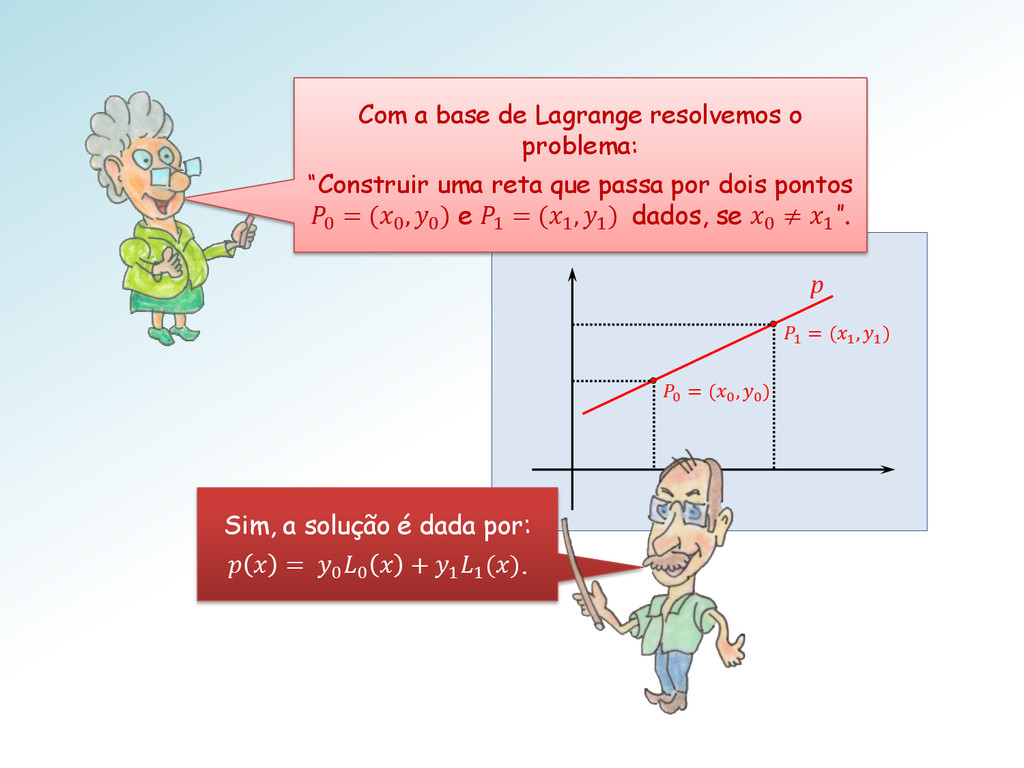
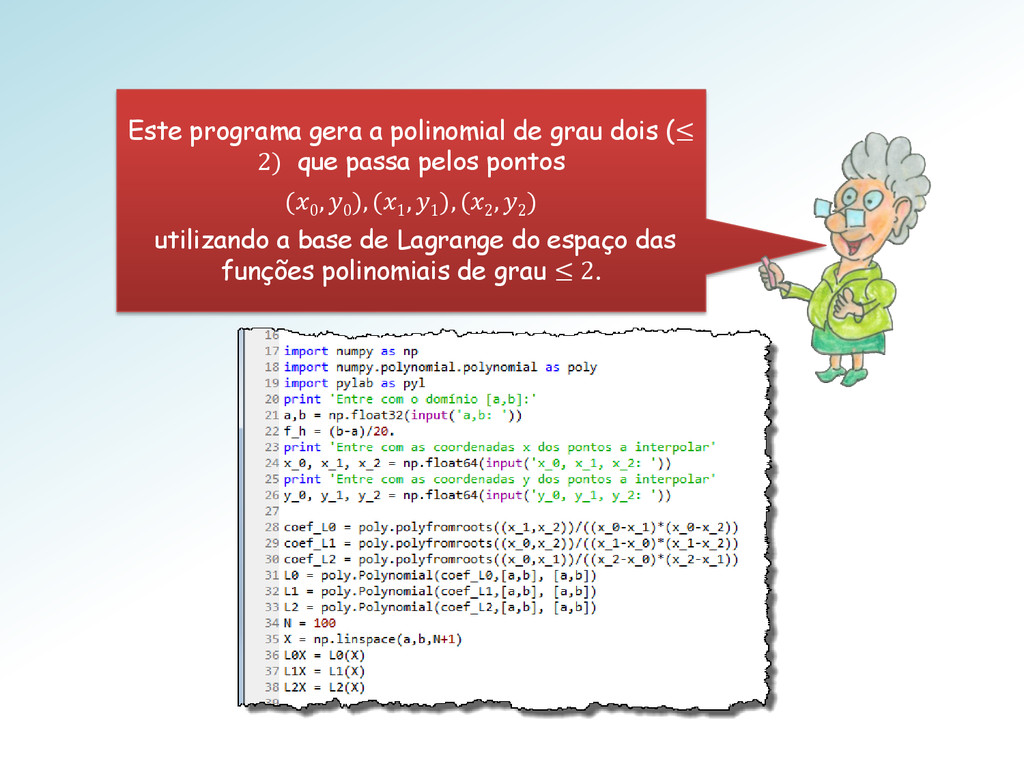
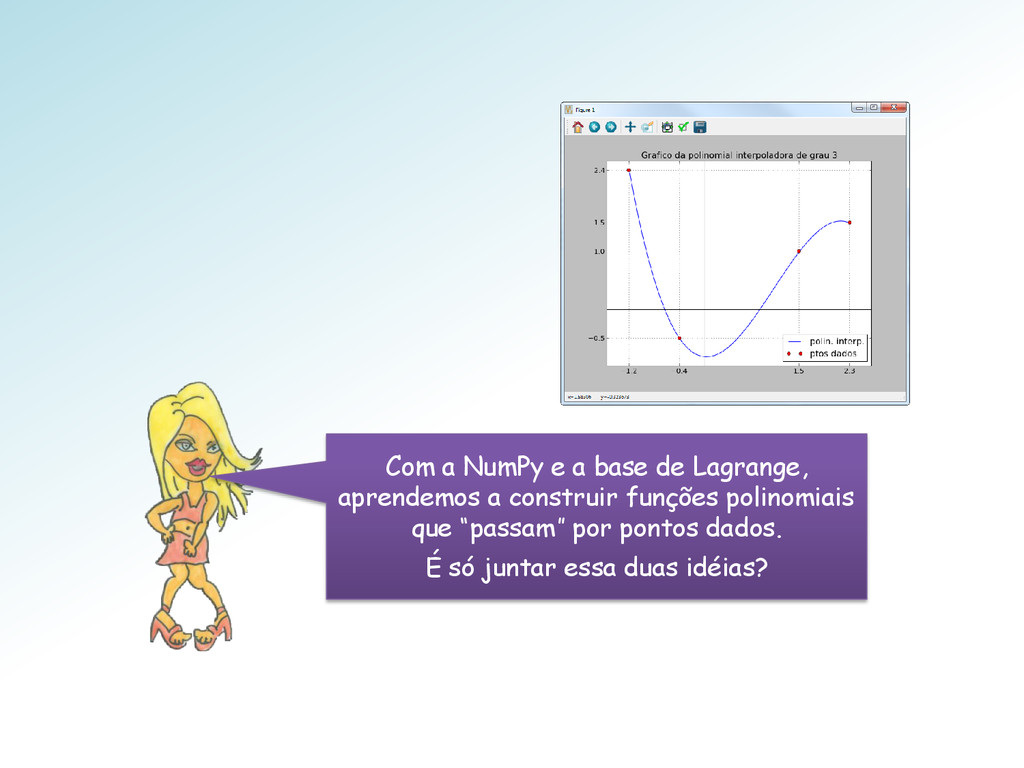
0 ) p Com a base de Lagrange resolvemos o problema: “Construir uma reta que passa por dois pontos 0 = (0 , 0 ) e 1 = (1 , 1 ) dados, se 0 ≠ 1 ”. Sim, a solução é dada por: = 0 0 + 1 1 ().
uma função polinomial. Assim como uma hipérbole. O gráfico de uma polinomial de grau dois é uma parábola. Mas o professor de desenho geométrico disse que é a circunferência!
função escalada 1 1 () passará pelo ponto ( 1 , 1 ); • Multiplicando 2 () por um número 2 , a função escalada 2 2 () passará pelo ponto ( 2 , 2 ). A mesma ideia se aplica às outras duas funções básicas:
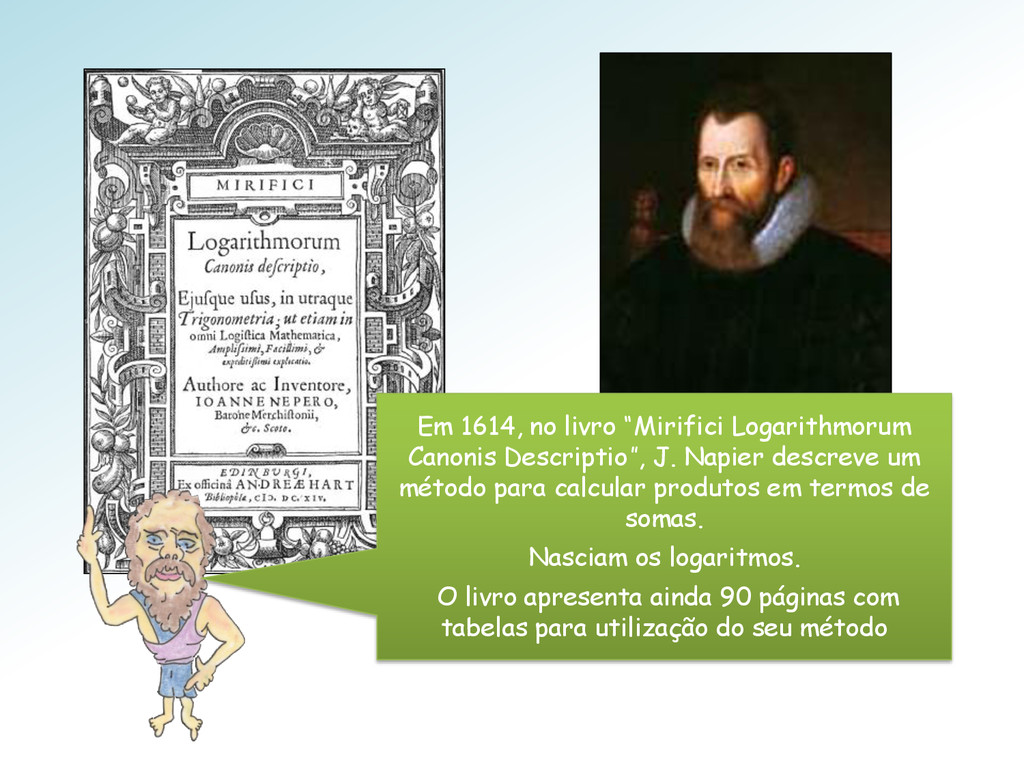
descreve um método para calcular produtos em termos de somas. Nasciam os logaritmos. O livro apresenta ainda 90 páginas com tabelas para utilização do seu método
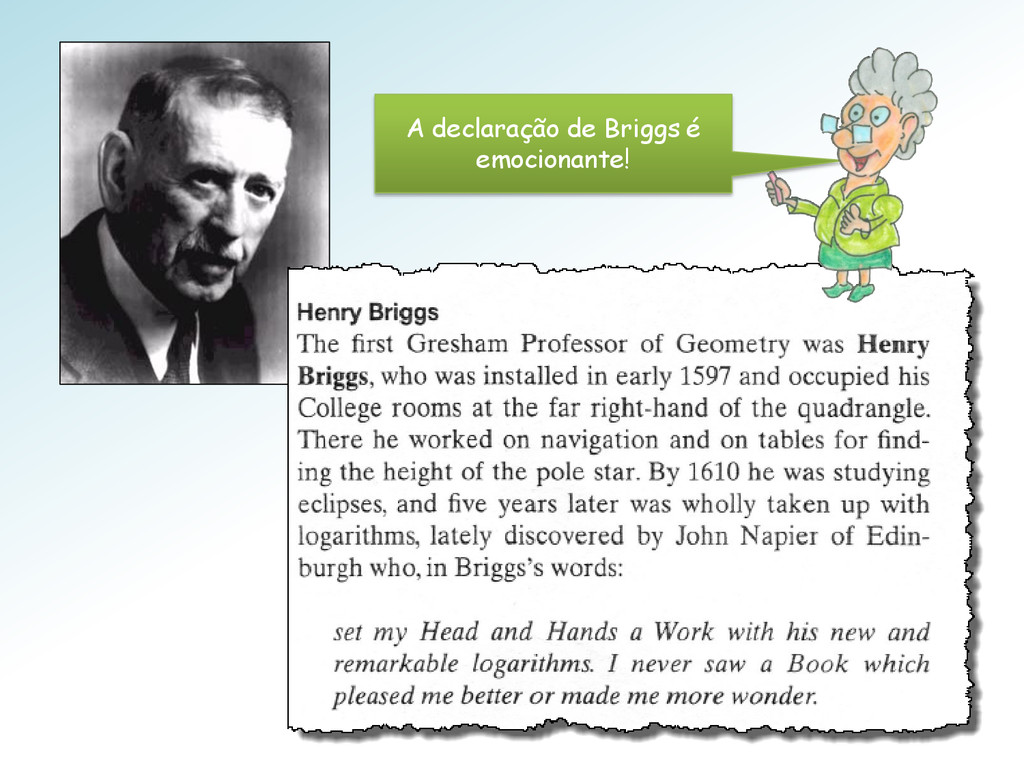
bons Professores! Briggs convenceu Johann Kepler sobre as vantagens da invenção de Napier. Kepler usou logaritmos para calcular as posições de Marte, o que conduziu-o a descobrir as leis do movimento planetário. A reputação de Kepler foi fundamental na disseminação do uso de logaritmos em toda a Europa. Isaac Newton usou as leis de Kepler para descobrir a lei da gravidade.
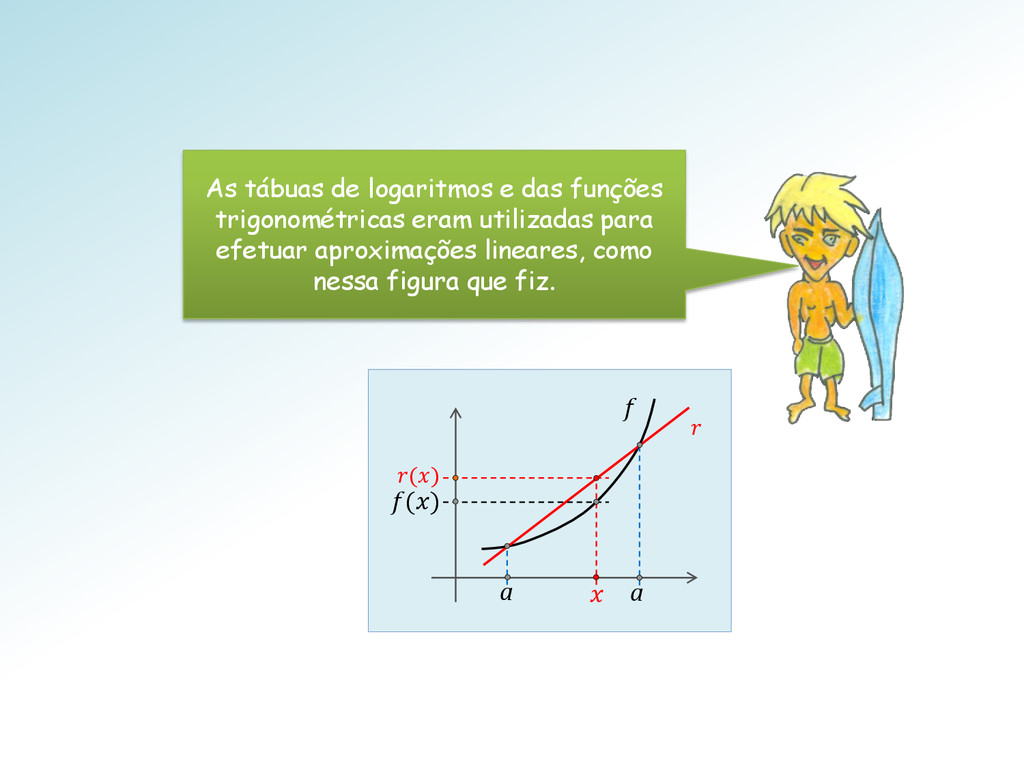
rápida, num tempo em que não haviam computadores, nem máquinas de calcular. Mestres, afinal de contas, para que eram utilizadas as tábuas de logaritmo?
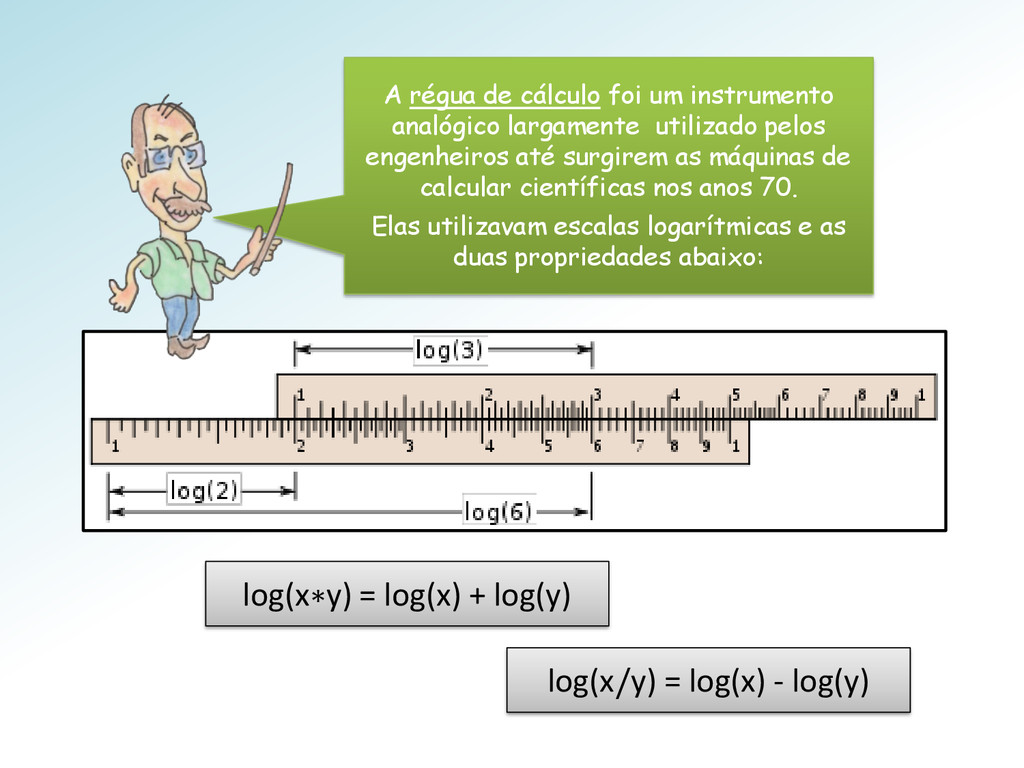
A régua de cálculo foi um instrumento analógico largamente utilizado pelos engenheiros até surgirem as máquinas de calcular científicas nos anos 70. Elas utilizavam escalas logarítmicas e as duas propriedades abaixo:
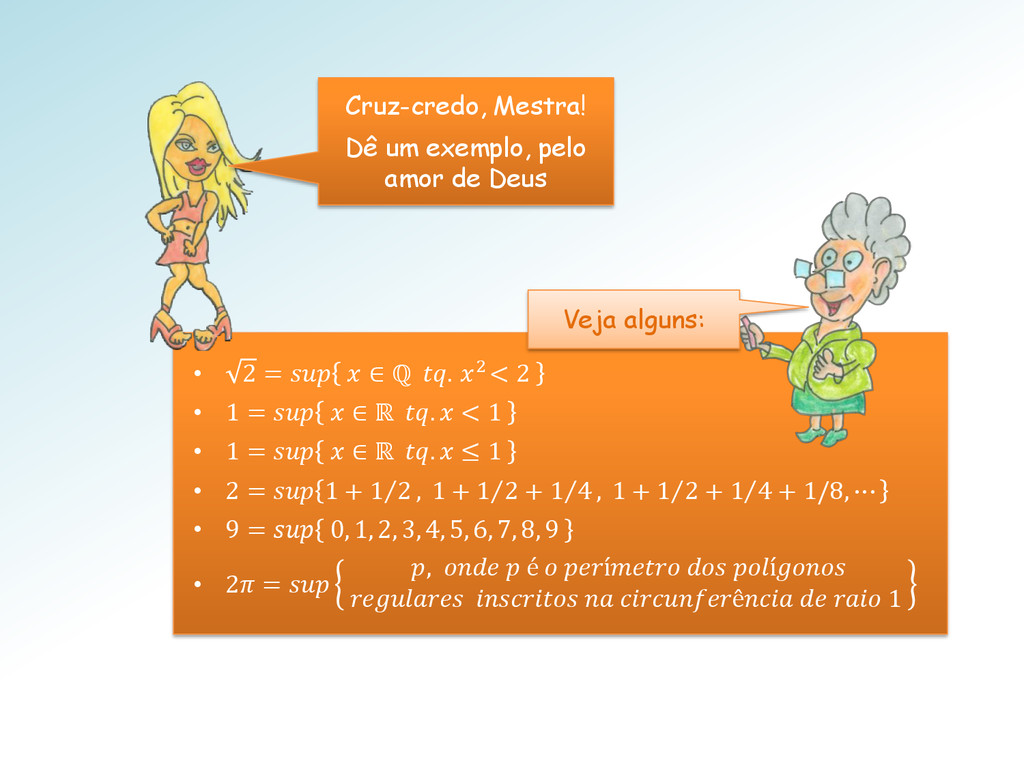
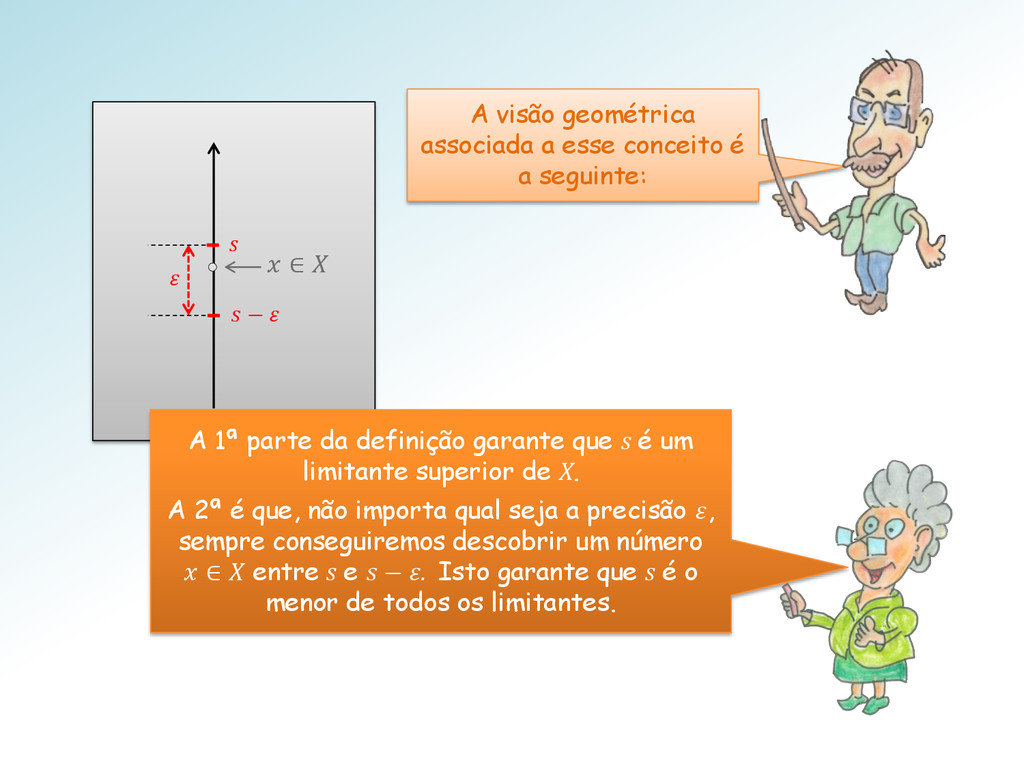
de números reais. Ele vai ser necessário adiante. O supremo s de um conjunto limitado X ⊂ ℝ, anotado (), é o menor de seus limitantes superiores. Em outras palavras, = () ⟺ ∀ ∈ , ≤ ∀ > 0, ∃ ∈ . . − < ≤
s é um limitante superior de X. A 2ª é que, não importa qual seja a precisão , sempre conseguiremos descobrir um número ∈ entre s e − . Isto garante que s é o menor de todos os limitantes. A visão geométrica associada a esse conceito é a seguinte:
definir uma norma em ℱ(, ℝ). Ele é muito grande para isto. Entretanto isto é possível para as funções : → ℝ que são limitadas. Para falar de aproximação entre funções, precisamos saber como medir o tamanho de funções. Em outras palavras, como definir a norma para uma função ∈ ℱ(, ℝ).
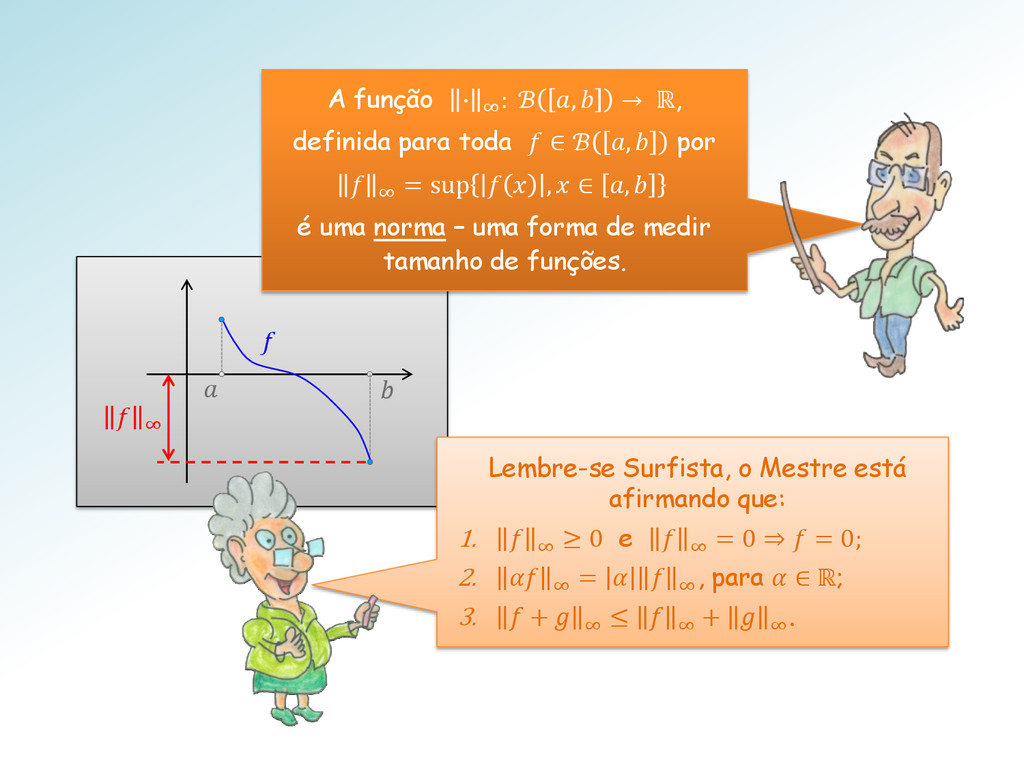
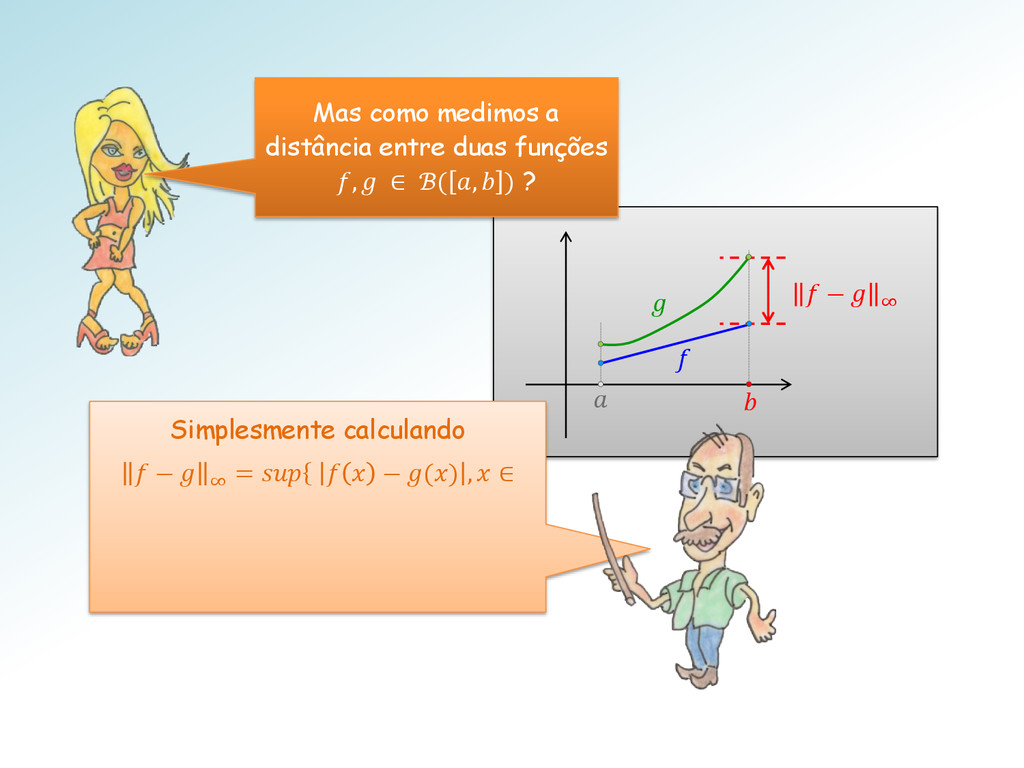
∞ ≥ 0 e ∞ = 0 ⇒ = 0; 2. ∞ = ∞ , para ∈ ℝ; 3. + ∞ ≤ ∞ + ∞ . A função ∙ ∞ : ℬ , → ℝ, definida para toda ∈ ℬ , por ∞ = sup , ∈ , é uma norma – uma forma de medir tamanho de funções.
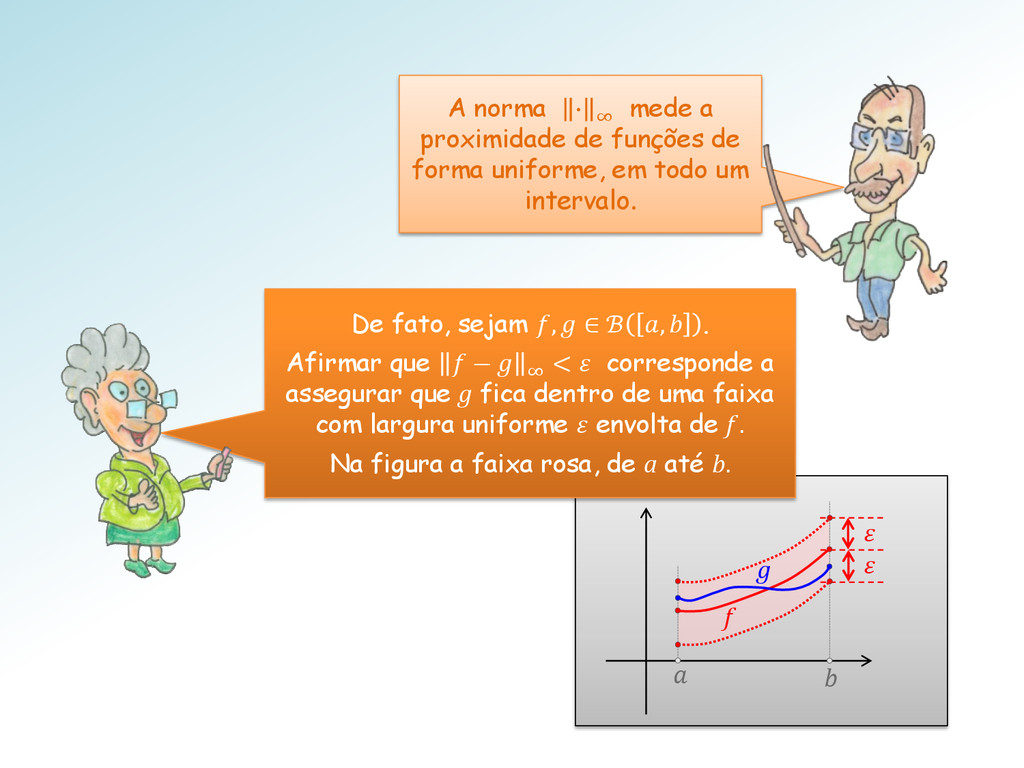
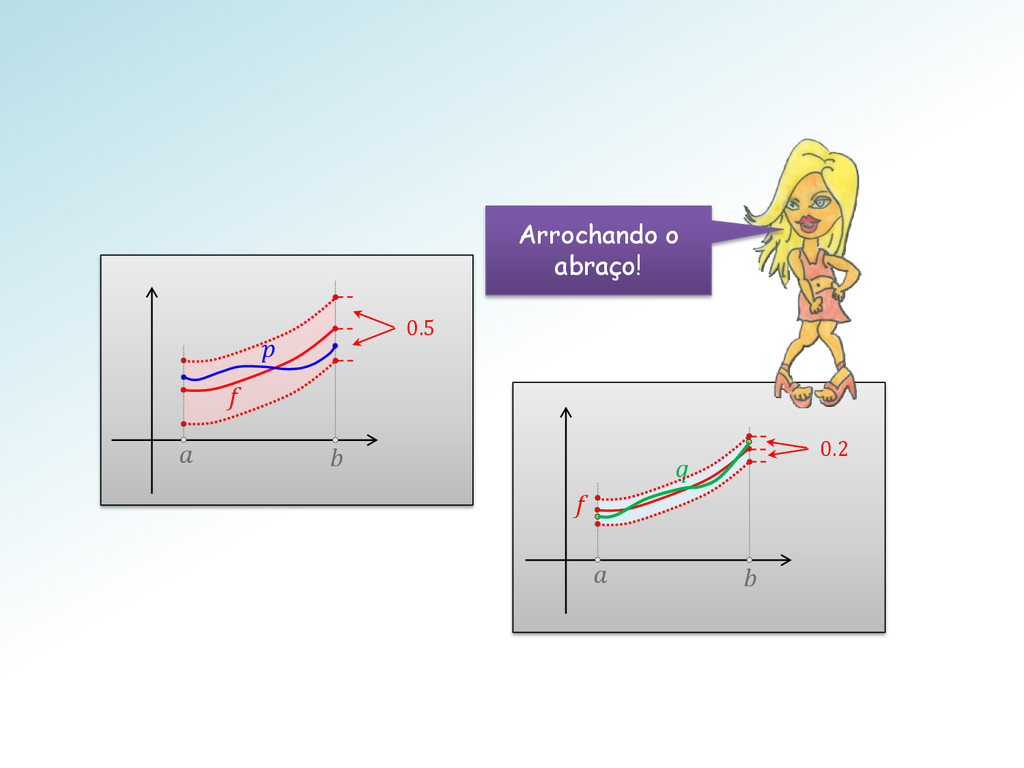
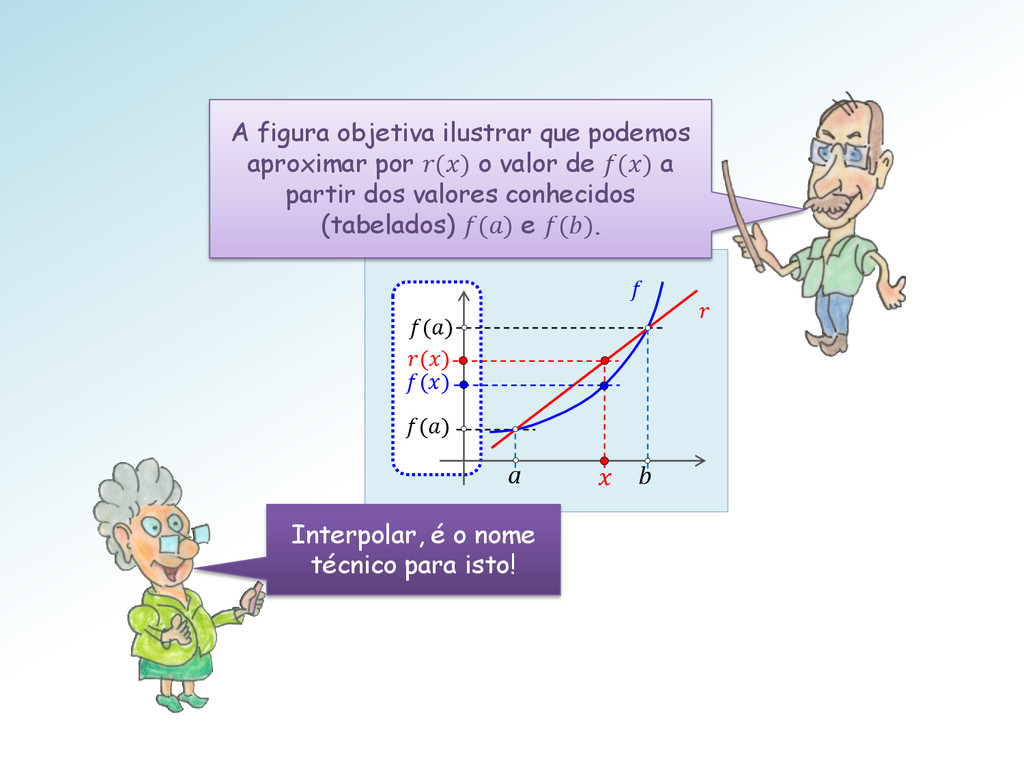
de forma uniforme, em todo um intervalo. De fato, sejam , ∈ ℬ , . Afirmar que − ∞ < corresponde a assegurar que g fica dentro de uma faixa com largura uniforme envolta de f . Na figura a faixa rosa, de a até b.
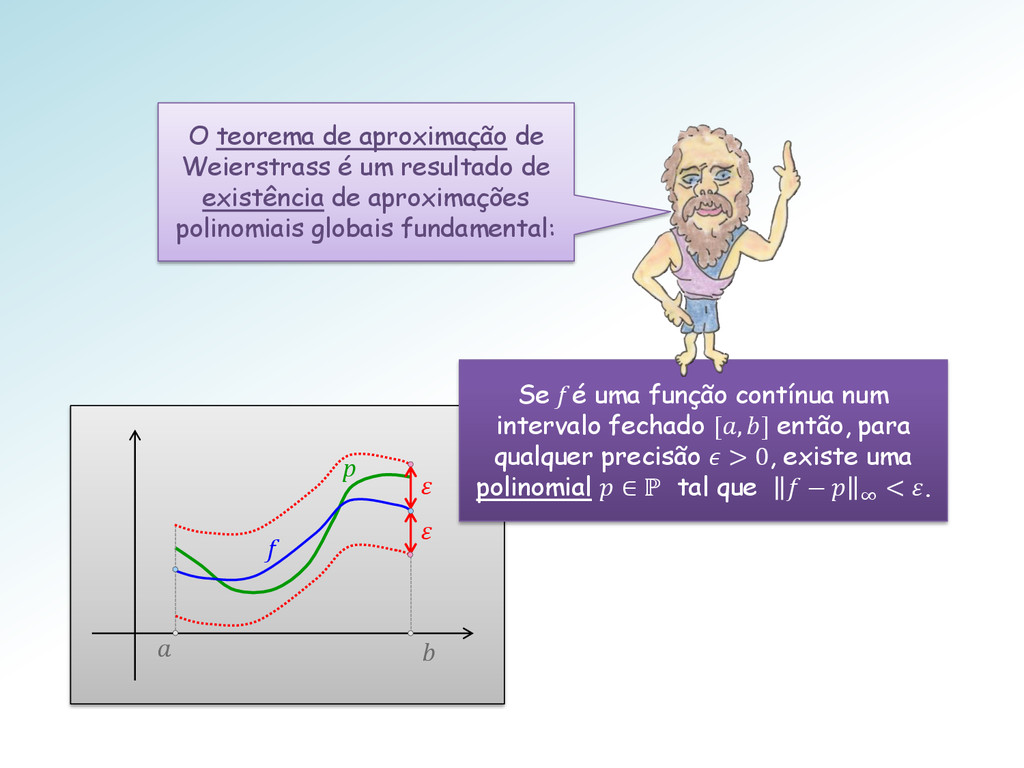
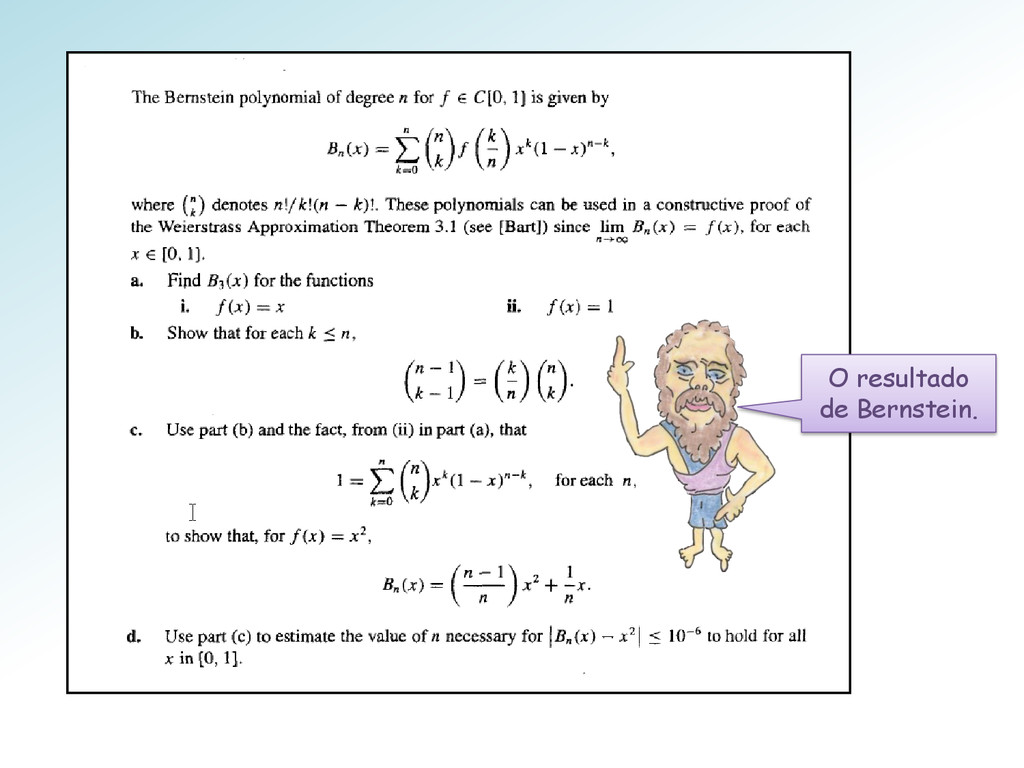
fechado [, ] então, para qualquer precisão > 0, existe uma polinomial ∈ ℙ tal que − ∞ < . O teorema de aproximação de Weierstrass é um resultado de existência de aproximações polinomiais globais fundamental:
real (como π, p/ex.) com qualquer número de casas decimais (i.é, com qualquer precisão ε > 0)”. Parafraseando o Mestre: “Podemos aproximar uma função contínua por uma polinomial com qualquer precisão ε > 0.”
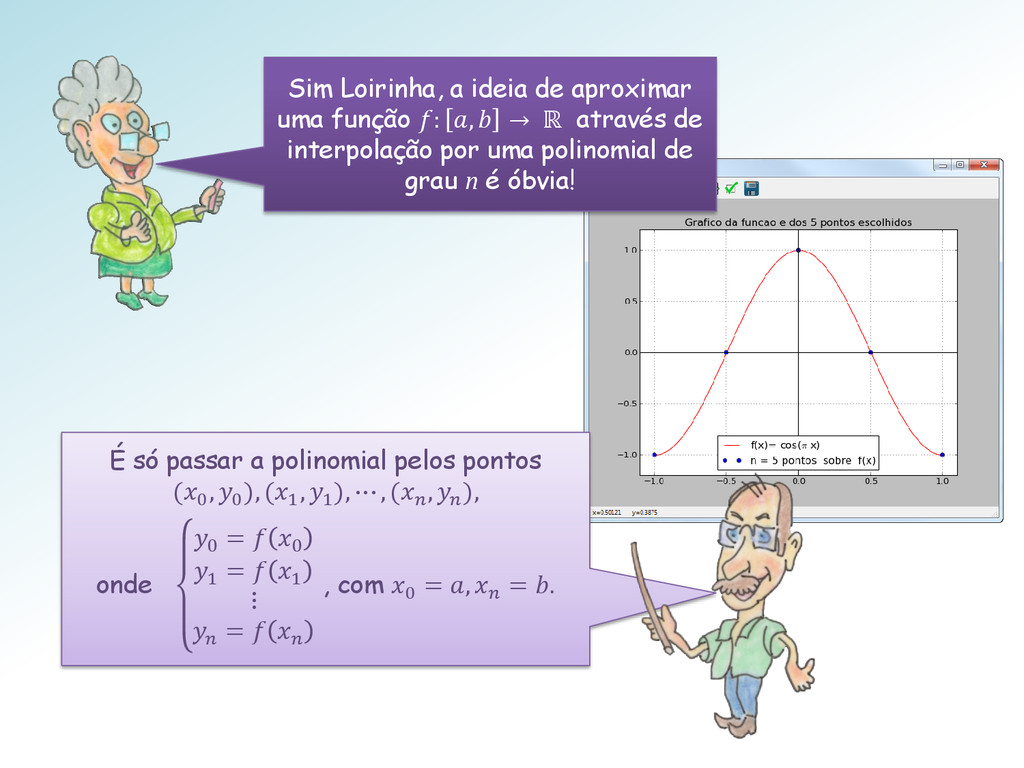
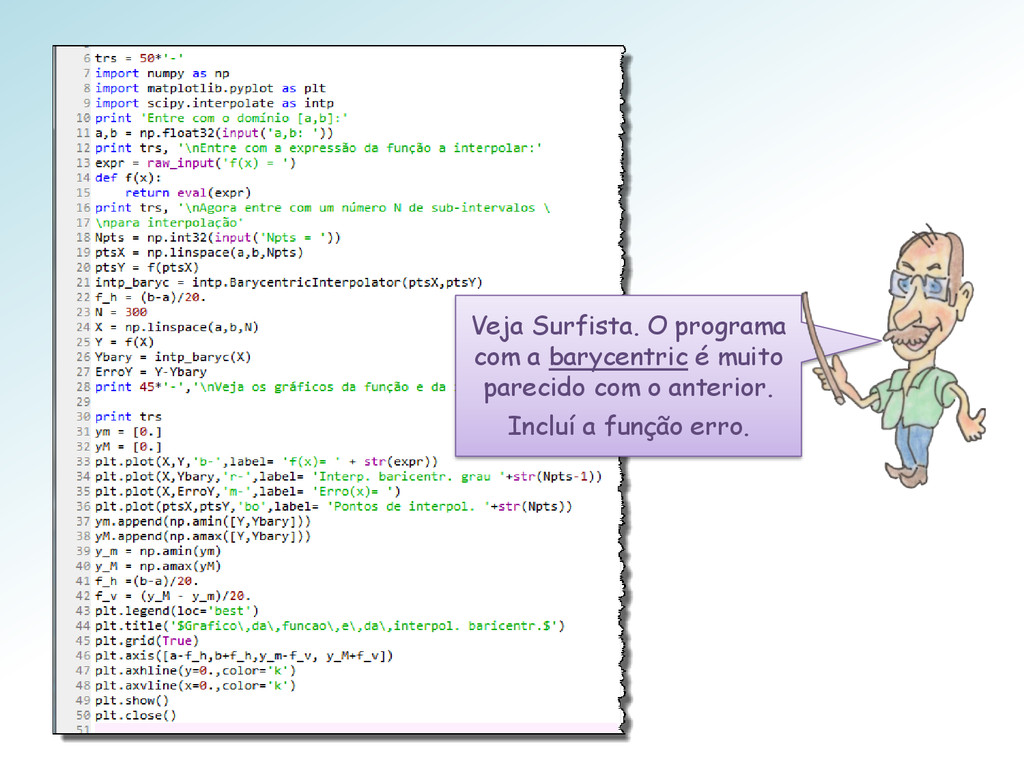
→ ℝ através de interpolação por uma polinomial de grau n é óbvia! É só passar a polinomial pelos pontos (0 , 0 ), (1 , 1 ), ⋯ , ( , ), onde 0 = 0 1 = 1 ⋮ = , com 0 = , = .
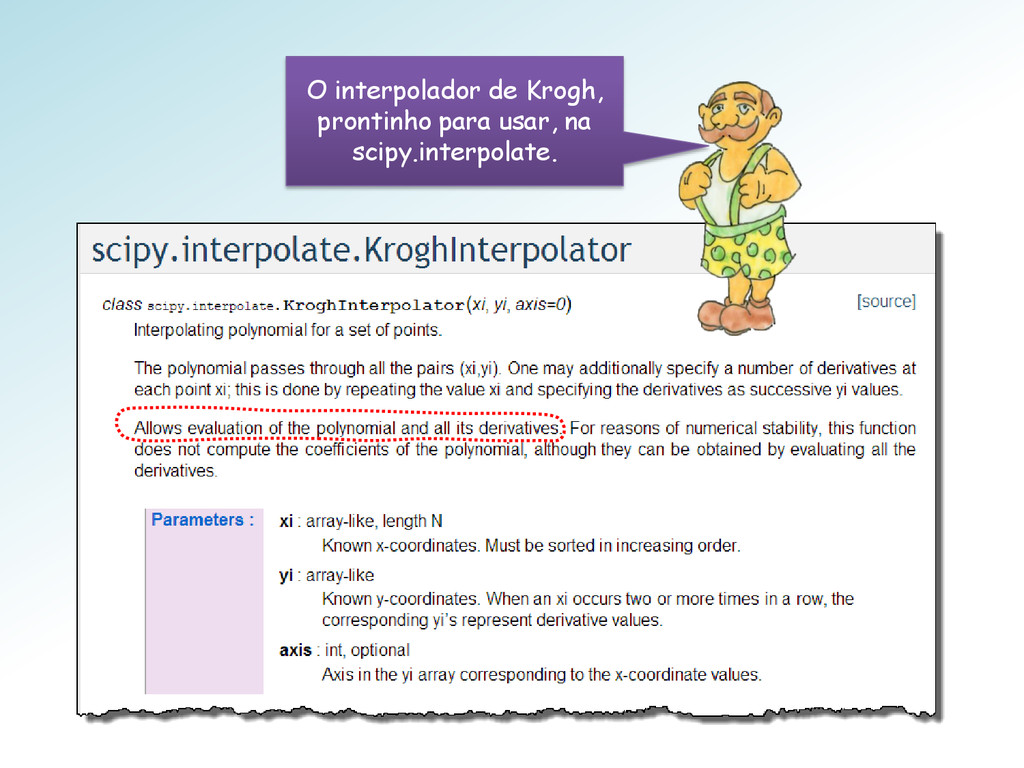
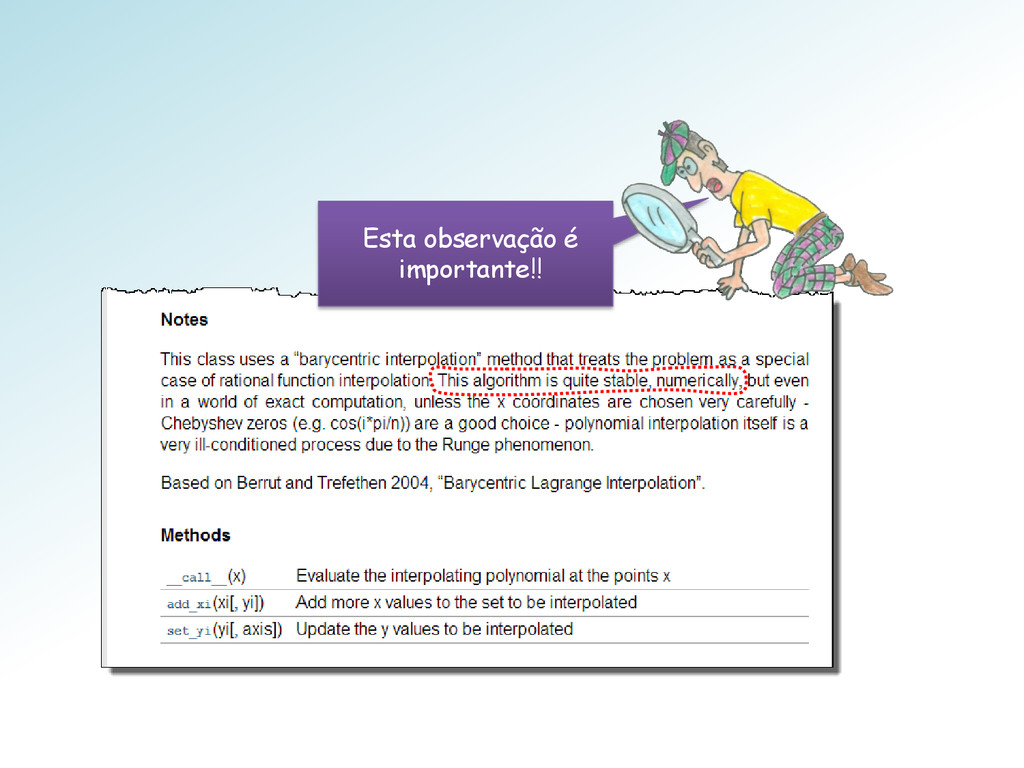
detalhados os algoritmos de Krogh empregados pela scipy.interpolate Inclusive o artigo compara número de operações com os algoritmos de Lagrange e Aitken/Neville, mostrando que os propostos por Krogh tem melhor performance.
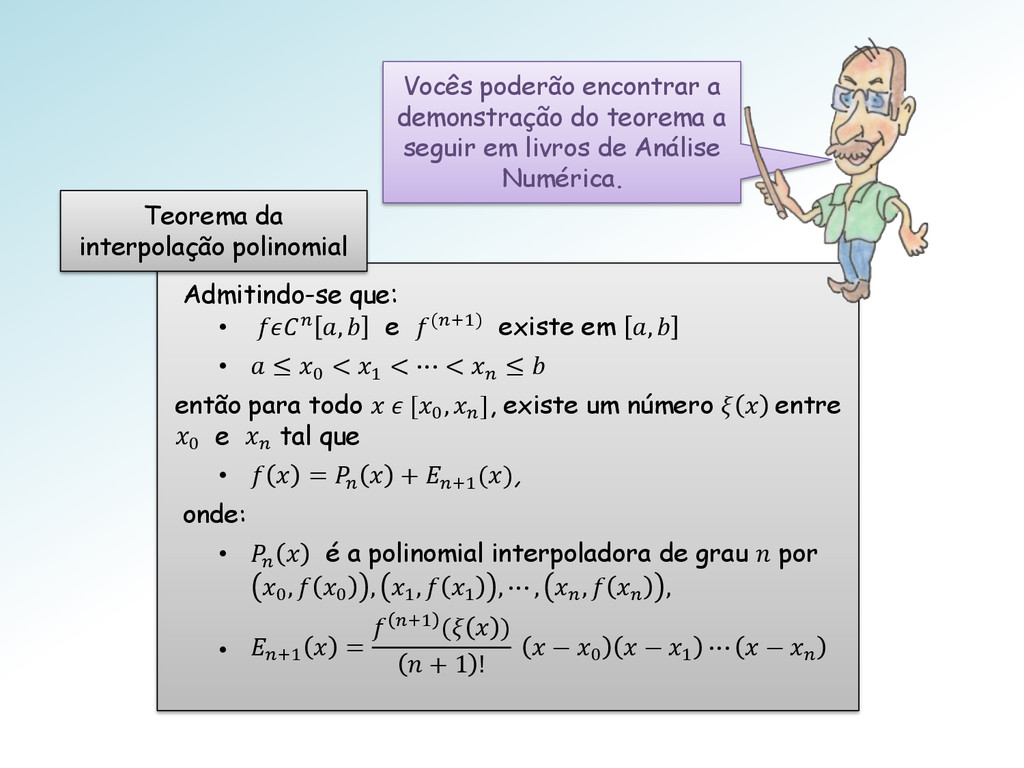
≤ 0 < 1 < ⋯ < ≤ então para todo [0 , ], existe um número entre 0 e tal que • = + +1 (), onde: • é a polinomial interpoladora de grau por 0 , 0 , 1 , 1 , ⋯ , , , • +1 = +1 ( ) + 1 ! − 0 − 1 ⋯ − Teorema da interpolação polinomial Vocês poderão encontrar a demonstração do teorema a seguir em livros de Análise Numérica.
⋯ − | . E, se os pontos forem igualmente espaçados de ℎ, +1 () ≤ ℎ+1 4 +1 . Se a derivada de ordem + 1, (+1), de for contínua no intervalo [0 , ], ela será limitada. Nesse caso, existirá um número real tal que max [0,] (+1) () =
+ Scipy calculam as funções tão rapidamente, com a precisão requerida pelo IEEE 754? Eu realmente não vejo razão para toda essa teoria sobre interpolação e erro. O computador fornece tudo pronto!
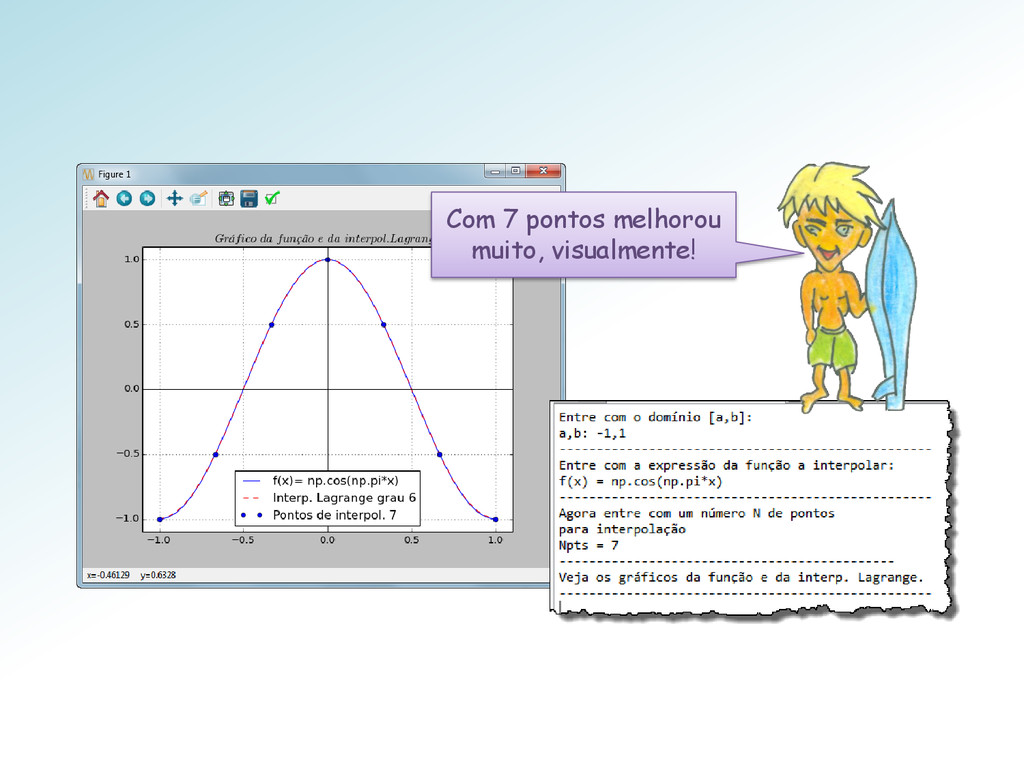
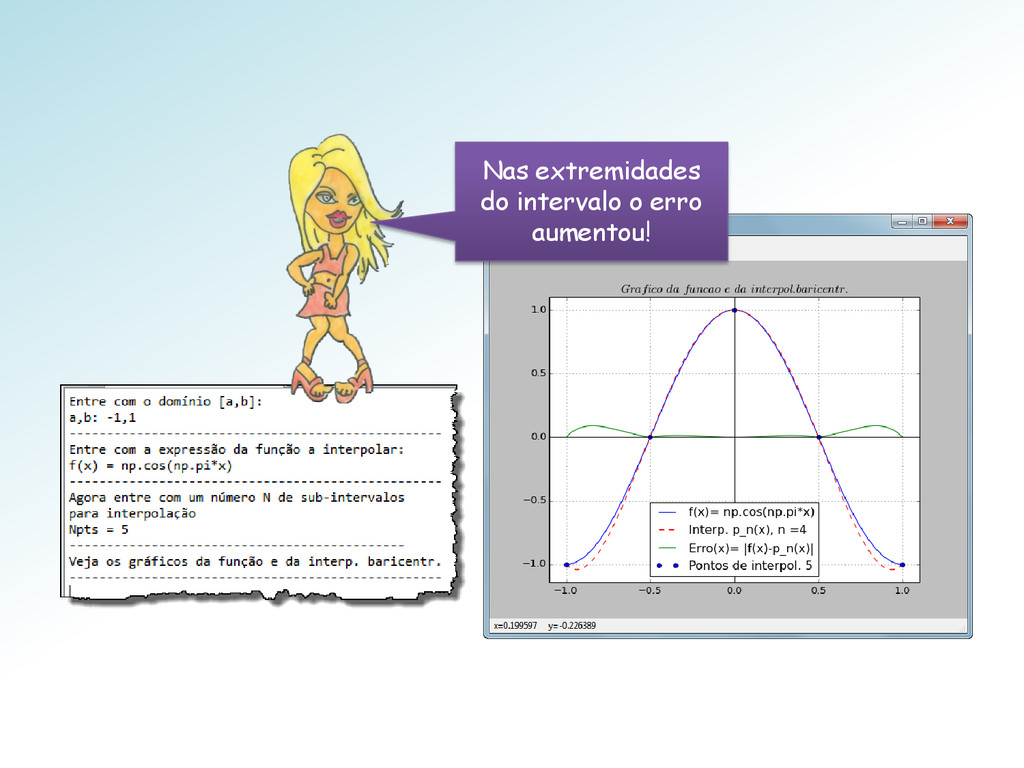
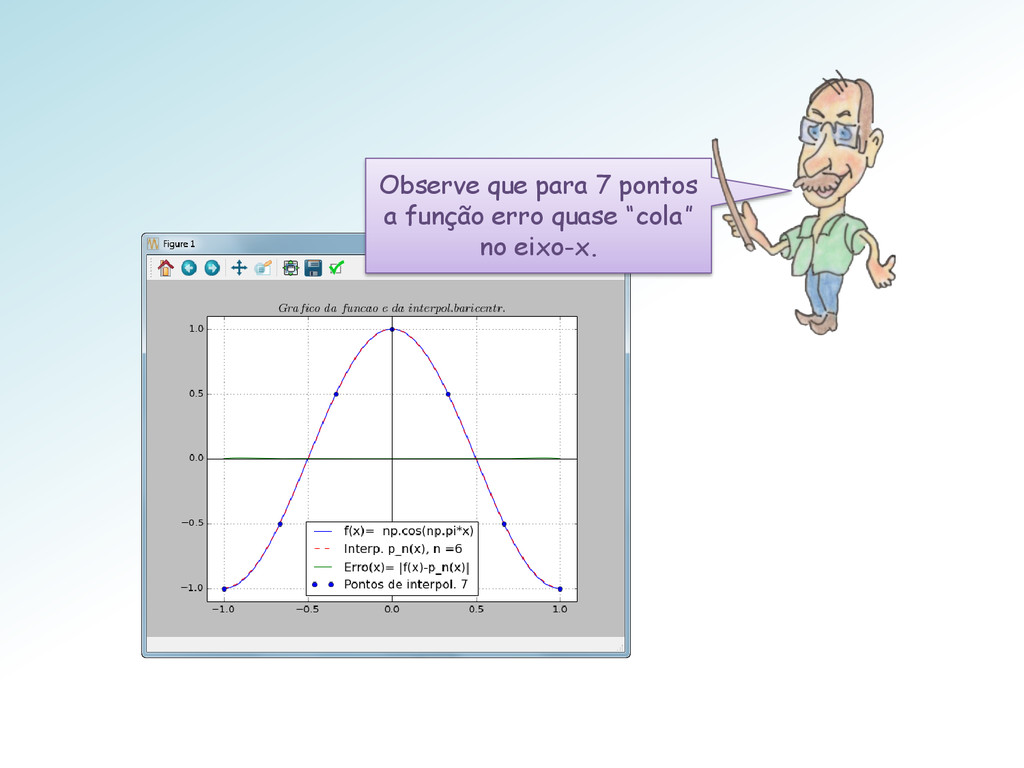
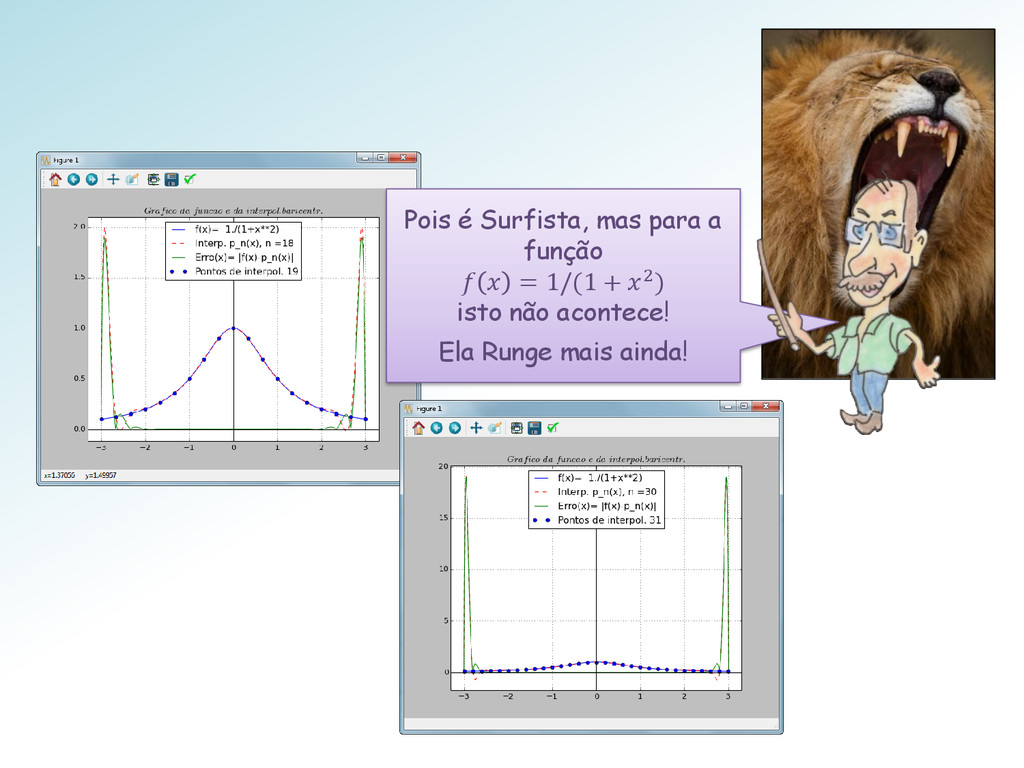
ao aumentarmos o grau da interpoladora, surge o fenômeno de Runge! Mestres, aumentando o grau n da polinomial interpoladora conseguiremos melhorar a precisão?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Assim ℙ[a, b] possui dimensão infinita (enumerável) e não se](https://files.speakerdeck.com/presentations/db667bf0ccba013116771efd7f77c4b7/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Em ℙ2[, ], que tem dimensão três, as funções básicas](https://files.speakerdeck.com/presentations/db667bf0ccba013116771efd7f77c4b7/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Esse teorema de Weierstrass informa que ℙ[, ] é denso](https://files.speakerdeck.com/presentations/db667bf0ccba013116771efd7f77c4b7/slide_58.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}