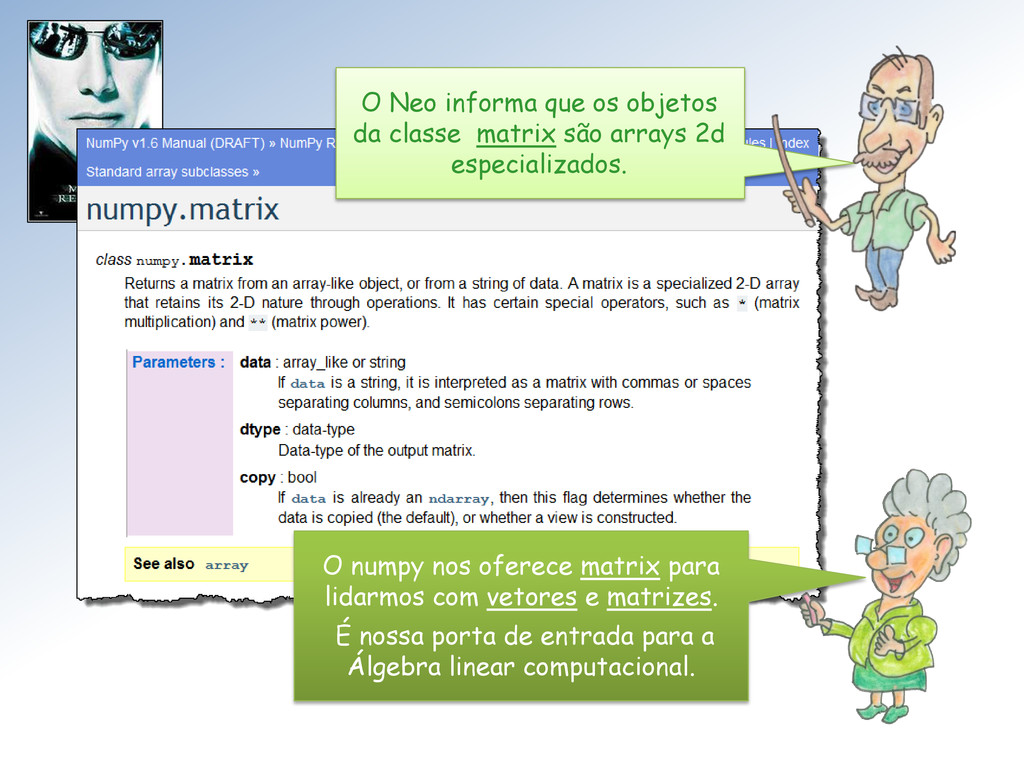
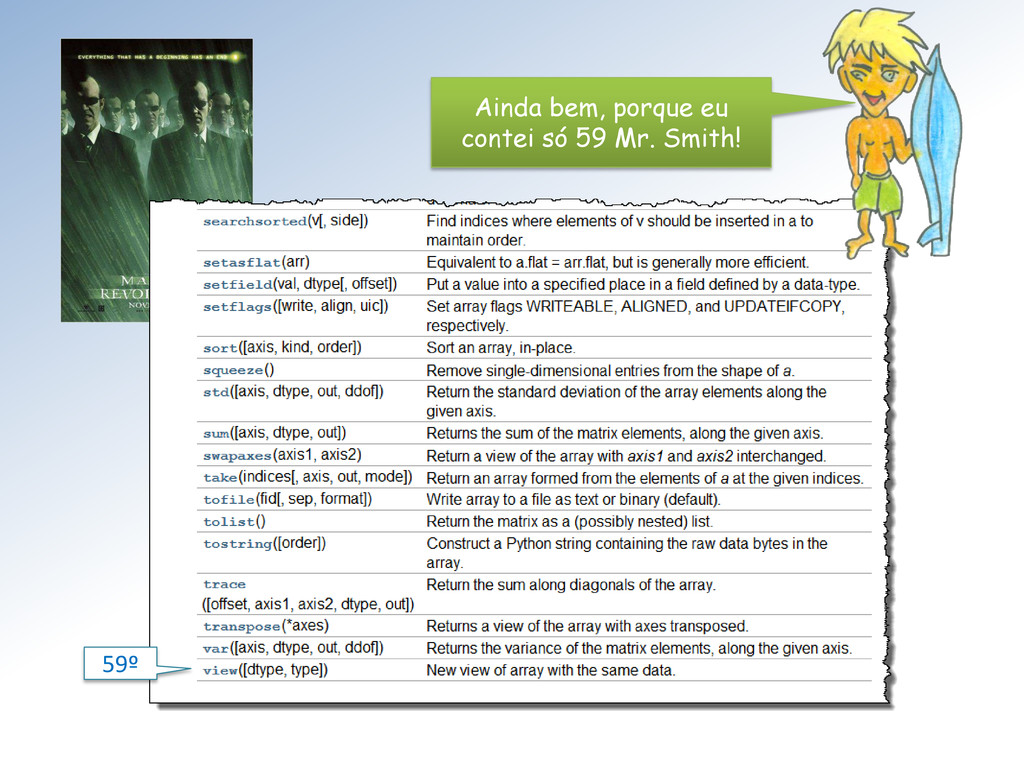
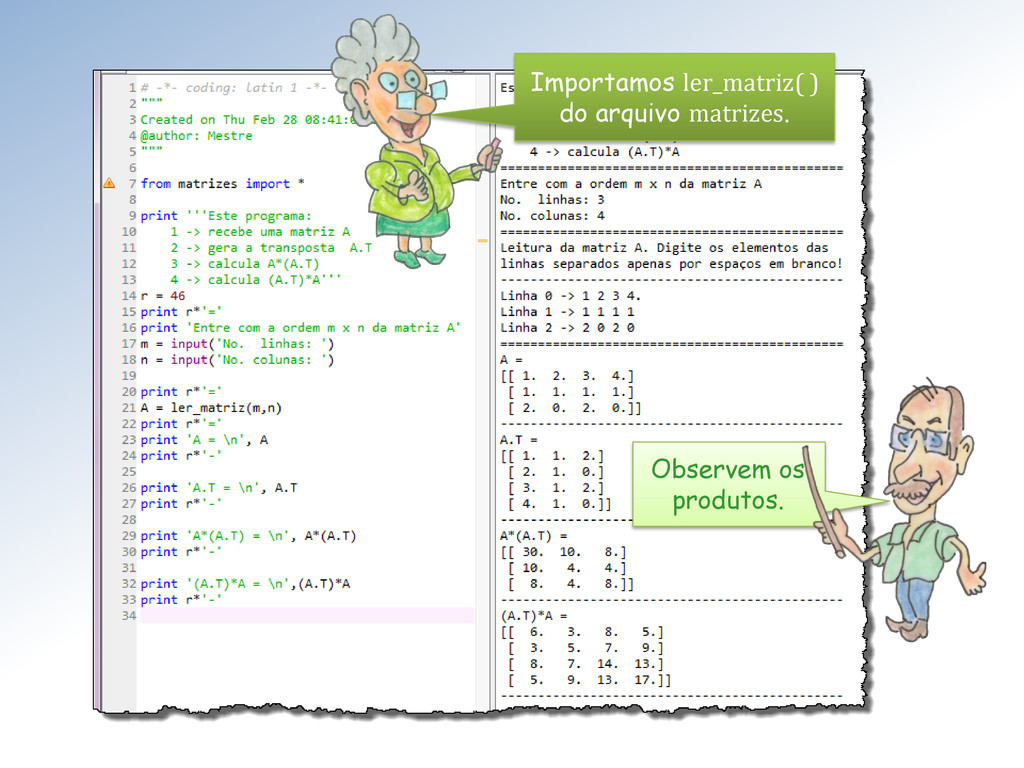
arrays 2d especializados. O numpy nos oferece matrix para lidarmos com vetores e matrizes. É nossa porta de entrada para a Álgebra linear computacional.
de instâncias. Sim, já vimos os vetores no plano e espaço euclidianos. Generalizamos para ℝ e ℂ, com vetores linhas e coluna. Vimos também o espaço das matrizes ℳ(, ).
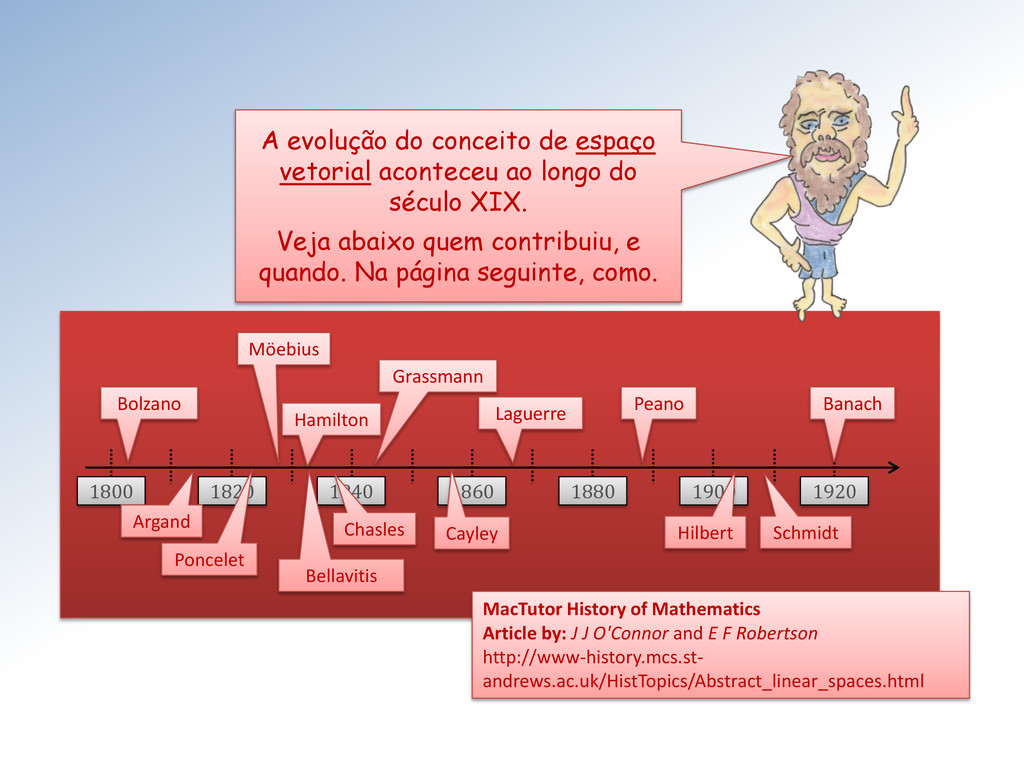
Möebius Grassmann Hilbert Peano Banach Schmidt Bellavitis Argand Cayley Laguerre Hamilton MacTutor History of Mathematics Article by: J J O'Connor and E F Robertson http://www-history.mcs.st- andrews.ac.uk/HistTopics/Abstract_linear_spaces.html A evolução do conceito de espaço vetorial aconteceu ao longo do século XIX. Veja abaixo quem contribuiu, e quando. Na página seguinte, como.
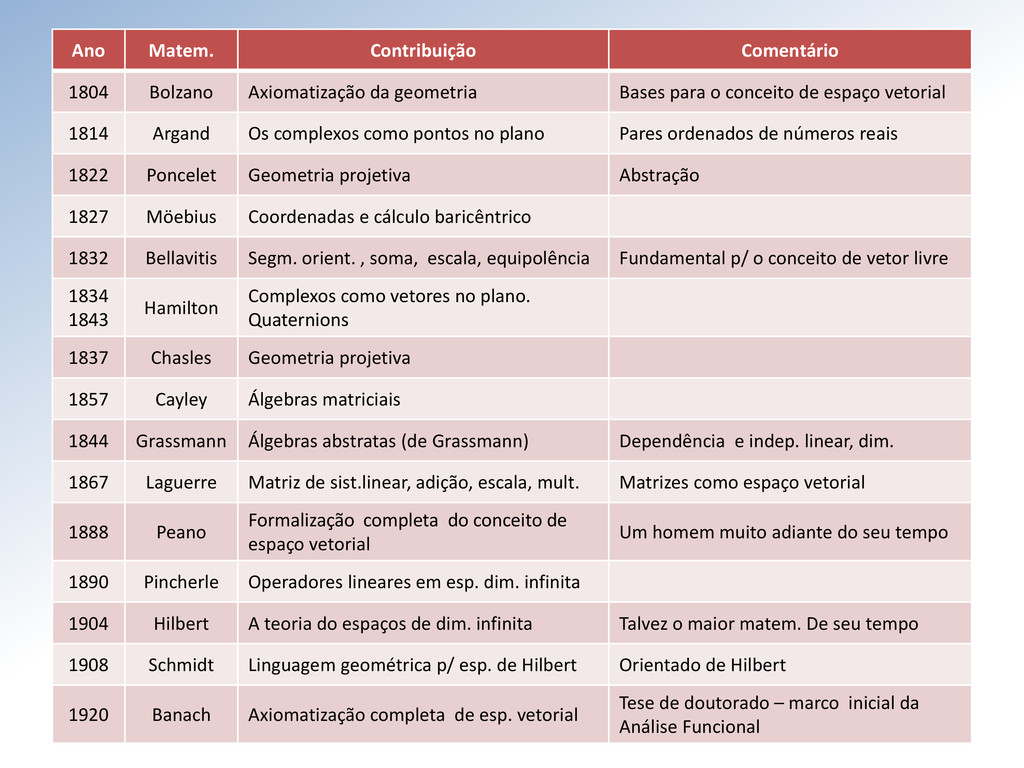
para o conceito de espaço vetorial 1814 Argand Os complexos como pontos no plano Pares ordenados de números reais 1822 Poncelet Geometria projetiva Abstração 1827 Möebius Coordenadas e cálculo baricêntrico 1832 Bellavitis Segm. orient. , soma, escala, equipolência Fundamental p/ o conceito de vetor livre 1834 1843 Hamilton Complexos como vetores no plano. Quaternions 1837 Chasles Geometria projetiva 1857 Cayley Álgebras matriciais 1844 Grassmann Álgebras abstratas (de Grassmann) Dependência e indep. linear, dim. 1867 Laguerre Matriz de sist.linear, adição, escala, mult. Matrizes como espaço vetorial 1888 Peano Formalização completa do conceito de espaço vetorial Um homem muito adiante do seu tempo 1890 Pincherle Operadores lineares em esp. dim. infinita 1904 Hilbert A teoria do espaços de dim. infinita Talvez o maior matem. De seu tempo 1908 Schmidt Linguagem geométrica p/ esp. de Hilbert Orientado de Hilbert 1920 Banach Axiomatização completa de esp. vetorial Tese de doutorado – marco inicial da Análise Funcional
com o conceito de estruturas algébricas, baseado essencialmente na teoria dos conjuntos. O representante, por excelência, desse modo de pensar abstrato é o grupo de matemáticos, na maioria franceses, conhecido sob o pseudônimo de Bourbaki.
são: Álgebra, Topologia, Funções de uma variável real, Espaços vetoriais topológicos, Integração, Àlgebra comutativa e Teoria espectral. As publicações do grupo talvez sejam o último trabalho com pretensões enciclopédicas na matemática... Elas iniciaram os “Elementos de Matemática” com ”Teoria dos Conjuntos”
and one of the supreme achievements of purely intellectual human activity. Georg Ferdinand Ludwig Philipp Cantor 03/03/1845-06/01/1918 O criador da teoria dos conjuntos foi Georg Cantor. Busquem mais informações sobre ele tanto na Wikipedia como em MacTutor History of Mathematics.
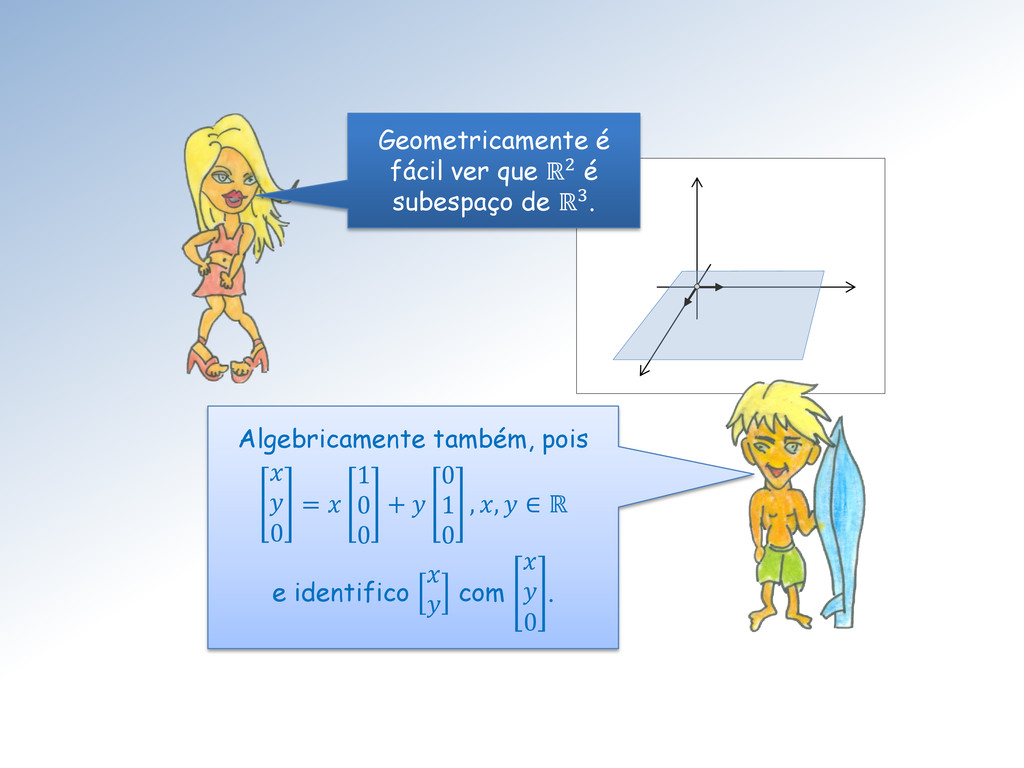
∈ ℝ, ∀, ∈ , + ∈ . Vocês estão certos: um subconjunto W de um espaço vetorial V que é, ele mesmo, um espaço vetorial com as operações de V é um subespaço vetorial de V.
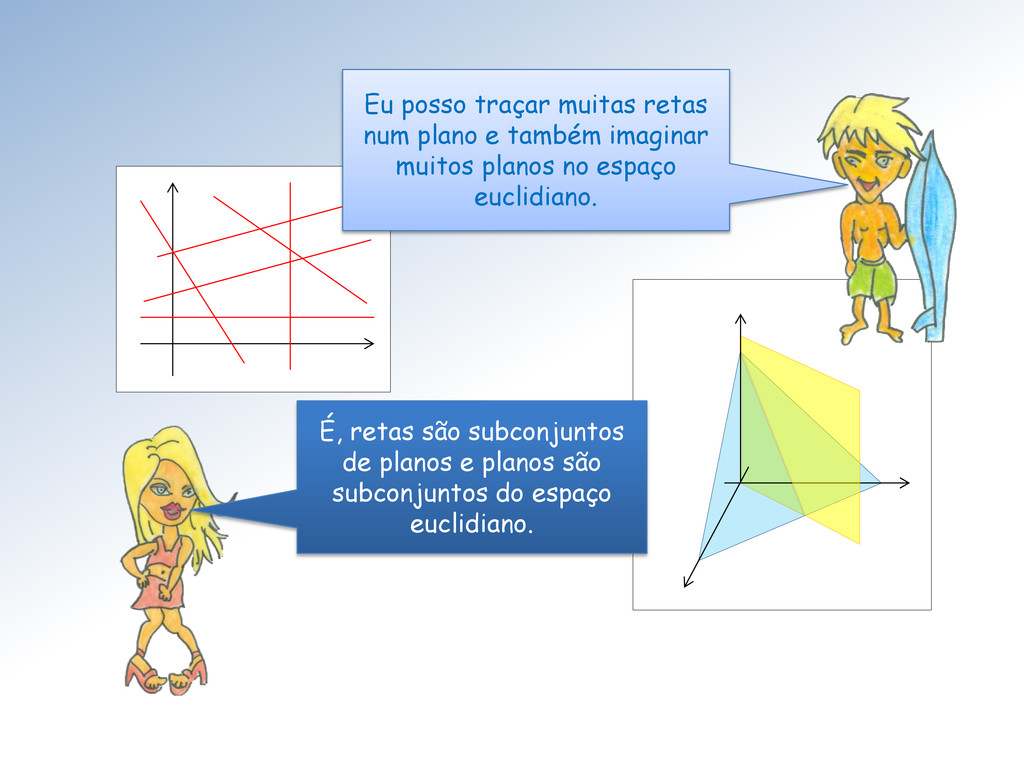
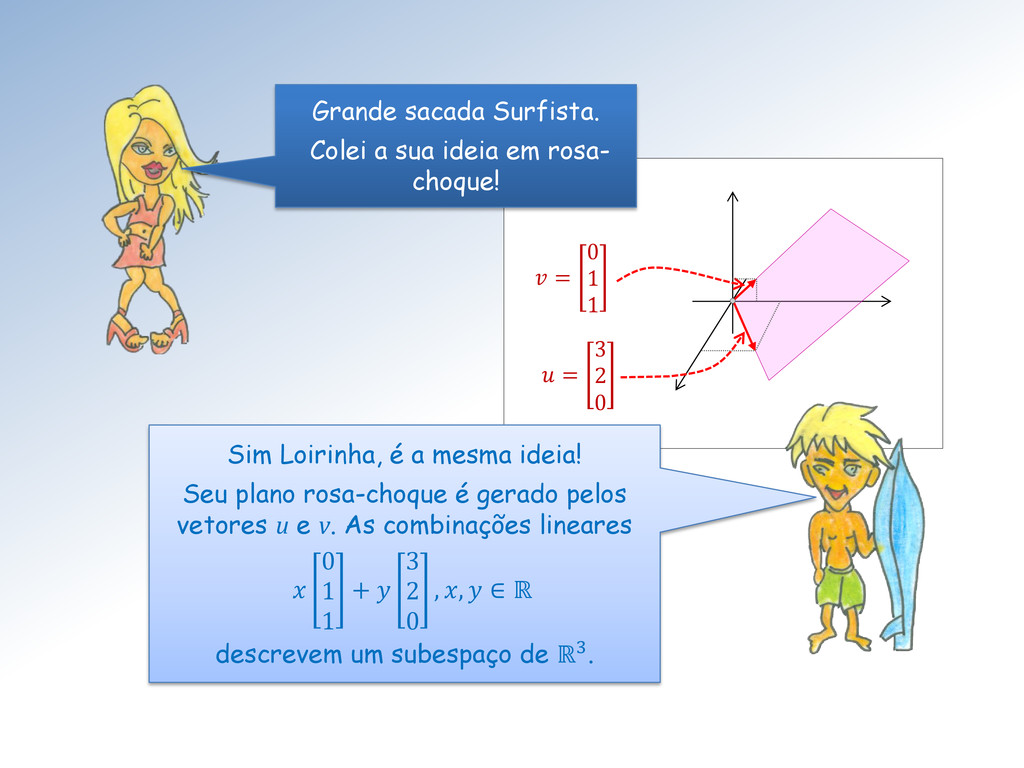
é a mesma ideia! Seu plano rosa-choque é gerado pelos vetores u e v. As combinações lineares 0 1 1 + 3 2 0 , , ∈ ℝ descrevem um subespaço de ℝ3. Grande sacada Surfista. Colei a sua ideia em rosa- choque!
um espaço vetorial V, o conjunto constituído por todas as combinações lineares dos vetores de X é um subespaço de V. Ele é chamado de subespaço gerado por X. O subespaço gerado por X pode ser o próprio V.
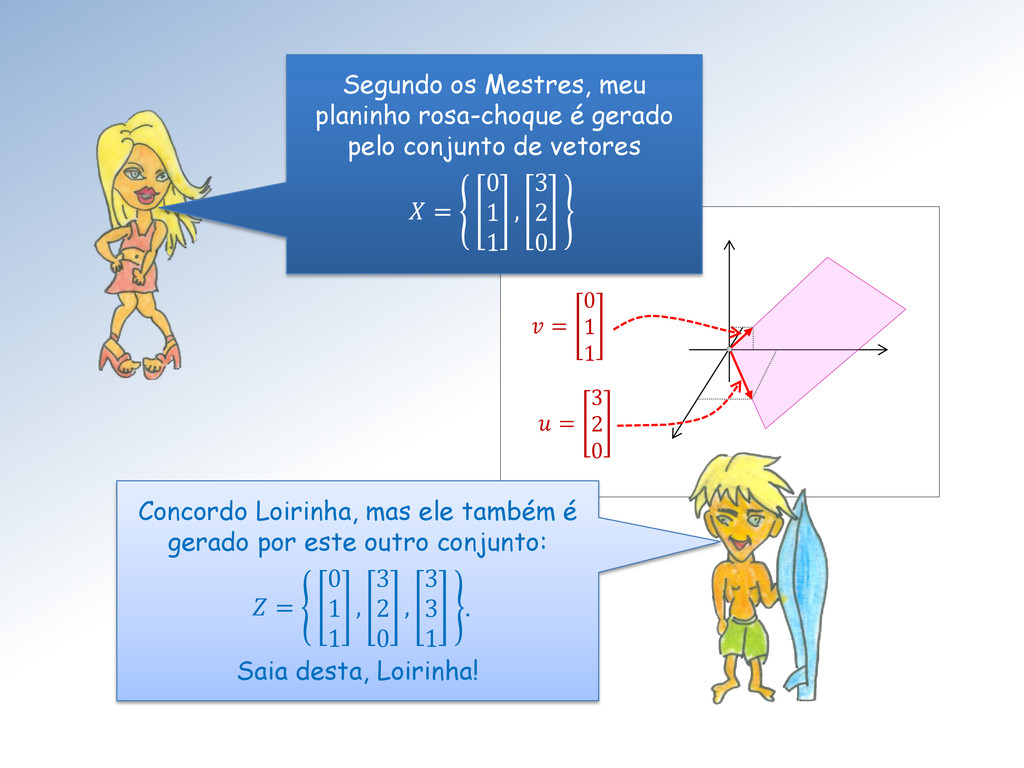
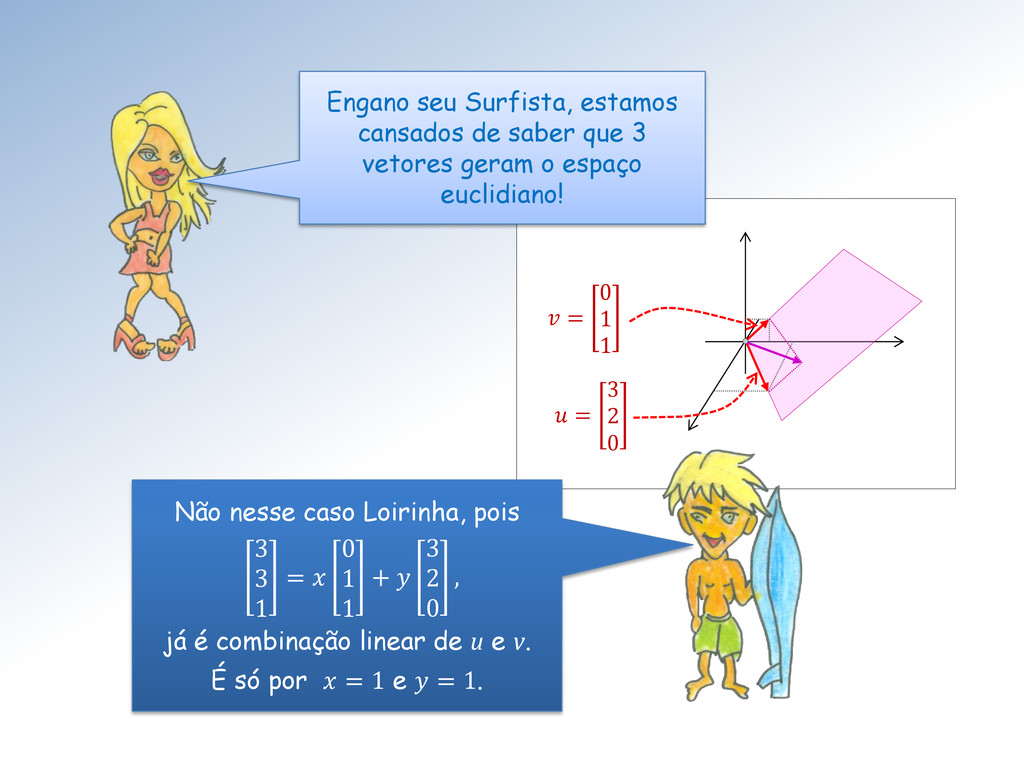
Mestres, meu planinho rosa-choque é gerado pelo conjunto de vetores = 0 1 1 , 3 2 0 Concordo Loirinha, mas ele também é gerado por este outro conjunto: = 0 1 1 , 3 2 0 , 3 3 1 . Saia desta, Loirinha!
caso Loirinha, pois 3 3 1 = 0 1 1 + 3 2 0 , já é combinação linear de u e v. É só por = 1 e = 1. Engano seu Surfista, estamos cansados de saber que 3 vetores geram o espaço euclidiano!
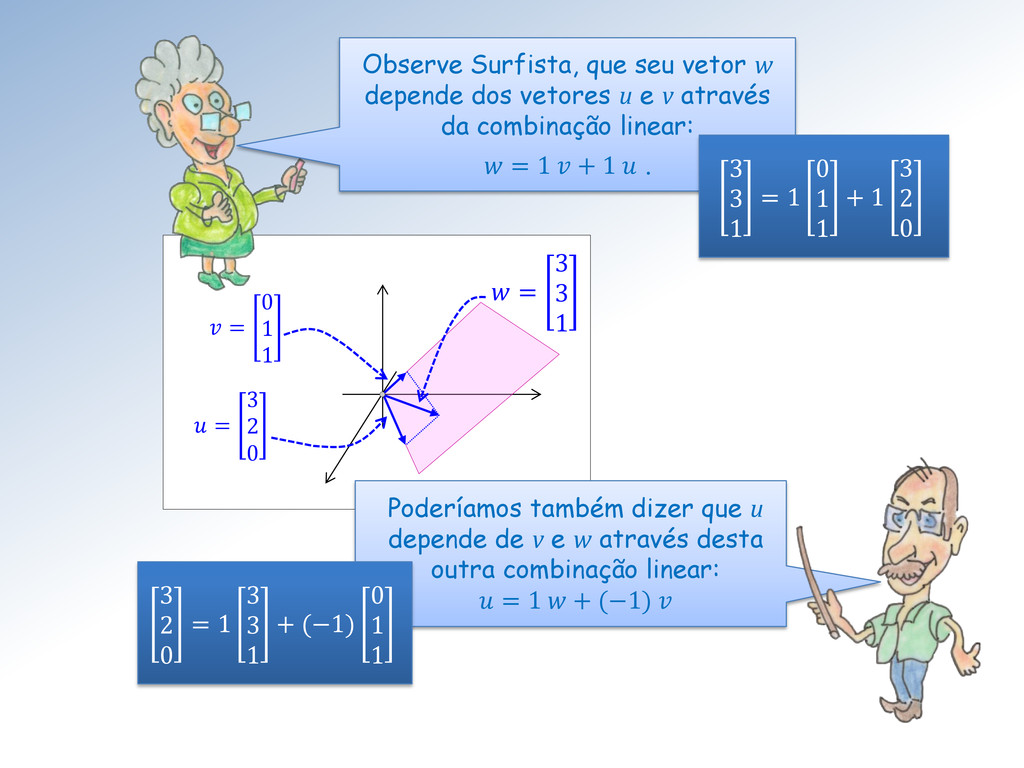
3 1 Poderíamos também dizer que u depende de v e w através desta outra combinação linear: = 1 + (−1) 3 2 0 = 1 3 3 1 + (−1) 0 1 1 Observe Surfista, que seu vetor w depende dos vetores u e v através da combinação linear: = 1 + 1 . 3 3 1 = 1 0 1 1 + 1 3 2 0
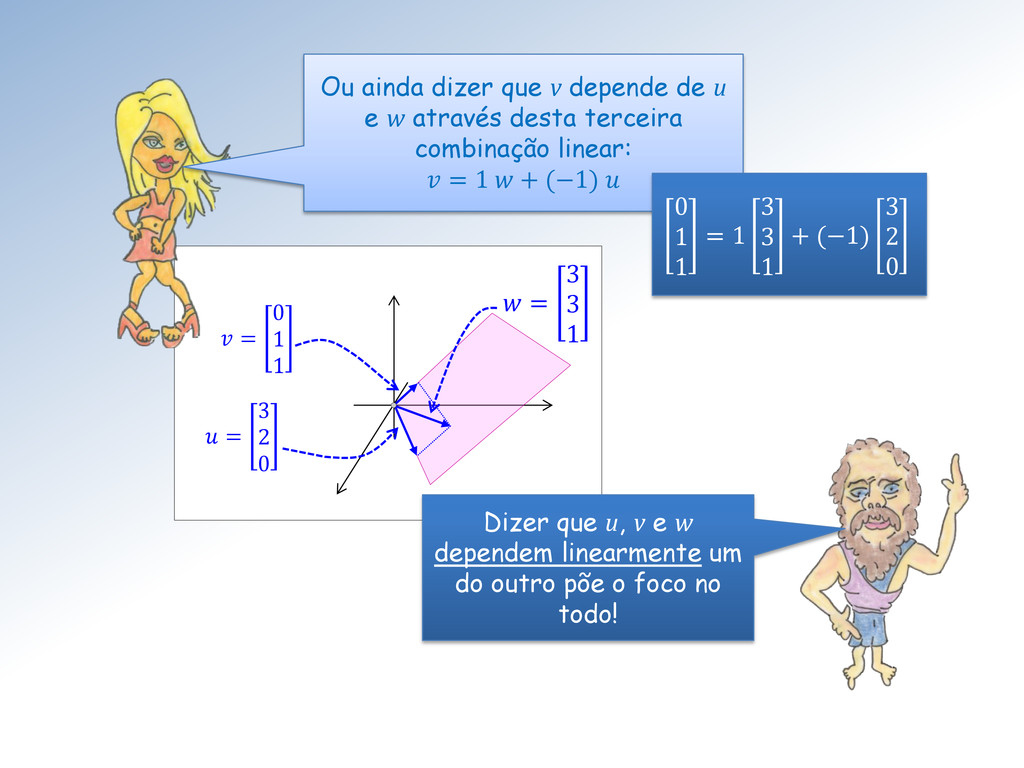
3 1 Dizer que u, v e w dependem linearmente um do outro põe o foco no todo! Ou ainda dizer que v depende de u e w através desta terceira combinação linear: = 1 + (−1) 0 1 1 = 1 3 3 1 + (−1) 3 2 0
de Leonardo da Vinci, em vingança ao fato dele desprezar os artistas. Segundo Platão artistas fazem cópias da cópia da realidade, que é o “mundo das ideias”. Tão platônicos quanto o próprio Platão.
Resolução de problemas • Heurística • Lógica • Aplicações Mestre, temos então um conflito enorme de interesses. Já vimos esses conceitos são fundamentais para nosso curso!
esqueleto, que nos sustenta. Estruturas algébricas são entidades abstratas constituídas por um conjunto (ou mais), operações sobre seus elementos e regras para operar.
operação. As estruturas de anel e corpo, envolvem um conjunto com duas operações. Já a estrutura de álgebra linear um conjunto e três operações. Vamos entender primeiro a estrutura de grupo.
regra ⋆ ⋆ = ⋆ ⋆ , ∀ , , ∈ . 2. Existe um elemento privilegiado, ∈ , tal que ⋆ = , ∀ ∈ . 3. A cada elemento ∈ corresponde um elemento ∈ que satisfaz ⋆ = . O grupo G é comutativo ou abeliano quando: 4. Para , ∈ vale ⋆ = ⋆ . Um grupo ,⋆ é uma estrutura formada por um conjunto G e uma operação ⋆ ∶ × → , tais que:
do tipo: • Adição (+), o elemento privilegiado receberá o nome de elemento neutro será representado pelo zero (0), e será o oposto, −. • Multiplicação ( ∙ ), o elemento privilegiado receberá o nome de unidade ou identidade e será representado por (1, ), e será o inverso, −1. Nos exemplos ⋆ geralmente representará uma operação tipo adição ou multiplicação, para conjuntos G com os mais variados tipos de elementos.
+ 9 = 12. Assim −3 = 9. Da mesma forma, −5 = 7, pois 5 + 7 = 12. Este é um exemplo de grupo finito. O conjunto das horas = 1, 2, 3, ⋯ , 11,12 do relógio ao lado com a operação de adição de horas, (, +), formam um grupo abeliano: • O elemento neutro é o 12 (o zero!) já que para toda hora ℎ ∈ temos + 12 = . • Cada hora ℎ ∈ possui sua oposta −ℎ, que satisfaz ℎ + −ℎ = 12.
são grupos. Confira que ℚ, + também é um grupo. ℤ, + é um grupo abeliano. • O elemento neutro é o 0 já que para todo ∈ ℤ temos + 0 = . • Cada ∈ ℤ possui seu oposto −, que satisfaz + − = 0.
grupo abeliano. Idem para ℂ, + e ℂ∗ , ∙ . Lembrem-se ℚ∗ = ℚ\{0} ℚ∗, ∙ também é um grupo abeliano. • O elemento privilegiado é o 1 (elemento identidade), pois para todo ∈ ℚ∗ temos ∙ 1 = . • Cada ∈ ℚ∗ possui seu inverso −1, que satisfaz ∙ −1 = 1.
um conjunto K e duas operações: + ∶ × → e ∙ ∶ ∗ × ∗ → ∗ que tornam K e ∗ = {0} grupos abelianos para a adição e multiplicação (respectivamente) e, além disso, satisfazem: A distributividade da multiplicação sobre a adição: ∙ + = ∙ + ∙ , ∀, , ∈
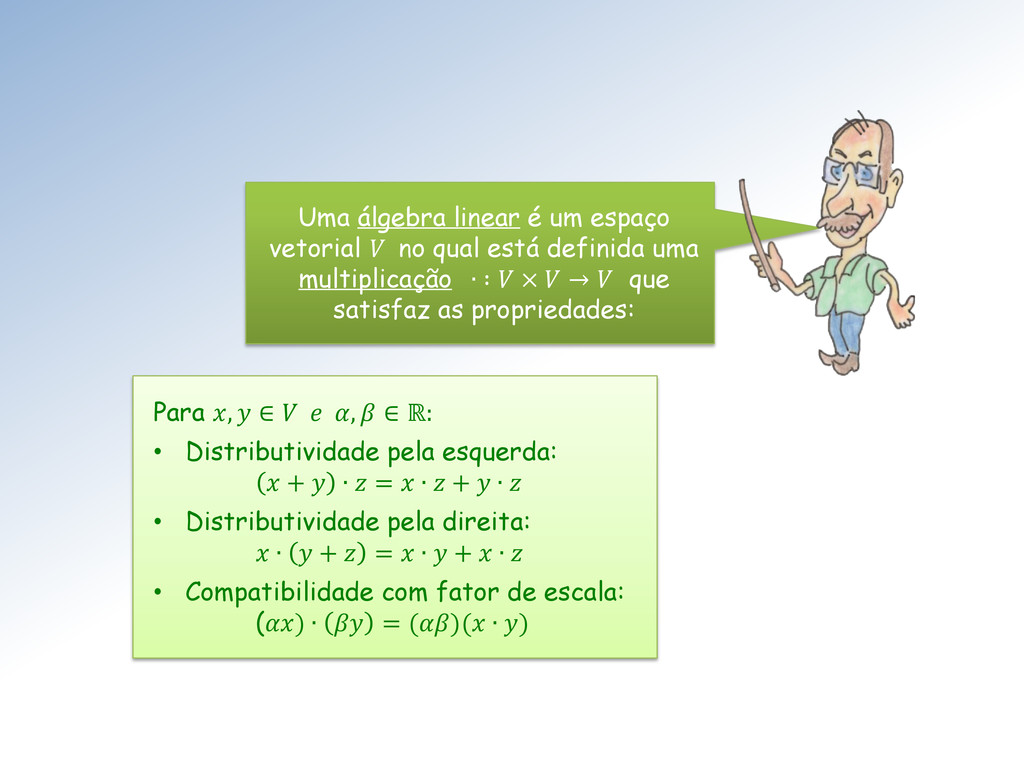
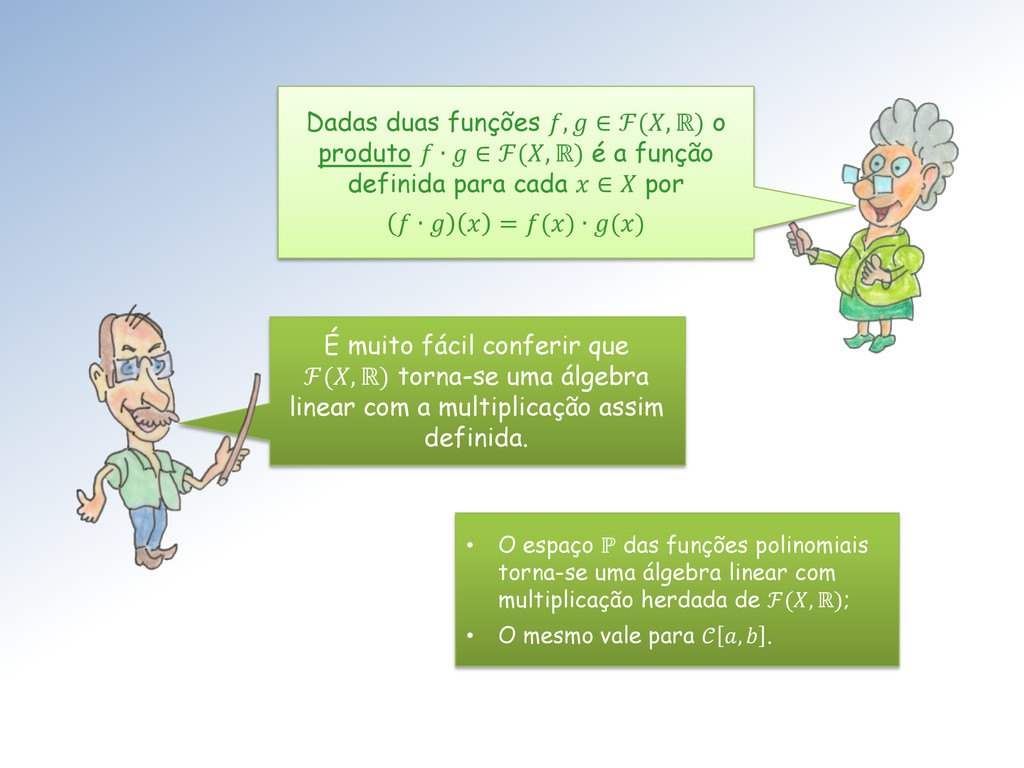
linear com multiplicação herdada de ℱ(, ℝ); • O mesmo vale para , . É muito fácil conferir que ℱ(, ℝ) torna-se uma álgebra linear com a multiplicação assim definida. Dadas duas funções , ∈ ℱ(, ℝ) o produto ∙ ∈ ℱ(, ℝ) é a função definida para cada ∈ por ∙ = () ∙ ()
de um vetor, em espaços vetoriais abstratos é exigir o cumprimento de três condições satisfeitas pelas normas no plano e no espaço euclidianos. A 1ª é muito natural e intuitiva: o tamanho de um vetor não pode ser negativo; mais que isso, se o tamanho de um vetor é zero ele tem que ser o vetor nulo. Não importa que coisa é esse vetor. As outras duas envolvem as operações de espaços vetoriais: a escala e a soma. Confiram na próxima transparência.
V é uma norma quando satisfaz: I. ≥ 0 e = 0 ⇒ = 0. II. = - a escala III. + ≤ + - a desigualdade triangular para , ∈ e α ∈ ℝ. Aqueles espaços vetoriais em que é possível definir uma norma são chamados espaços normados. Os espaços euclidianos são espaços normados (prove isto, Loirinha).
tal função são denominados espaços com produto interno. Um produto interno num espaço vetorial V é uma função, ∙ , ∙ ∶ × → ℝ, satisfazendo as propriedades: I. , = , II. , + = , + , III. , = , = , IV. , > 0, se ≠ 0 e , = 0, se = 0.
quando , = 0. O caso trivial é o vetor nulo, 0, ortogonal a todos os outros. E a projeção ortogonal de um vetor abstrato u sobre um vetor abstrato v é o vetor dado por = ,
nossa intuição euclidiana é preservada ao máximo. Espaços de Hilbert são espaços com produto interno onde toda sequência de Cauchy é convergente. É a preservação de outra característica fundamental do plano e espaço euclidianos.
• Os espaços de Sobolev 1, 0 1, 2, etc, ambientes naturais para soluções de EDPs. Além dos espaços euclidianos de dimensão finita, é claro! Alguns exemplos importantíssimos de espaços de Hilbert (instâncias), são os seguintes:
do espaço euclidiano tri-dimensional. O produto vetorial. Da geometria euclidiana sabemos que existe um único plano determinado por três pontos não colineares.
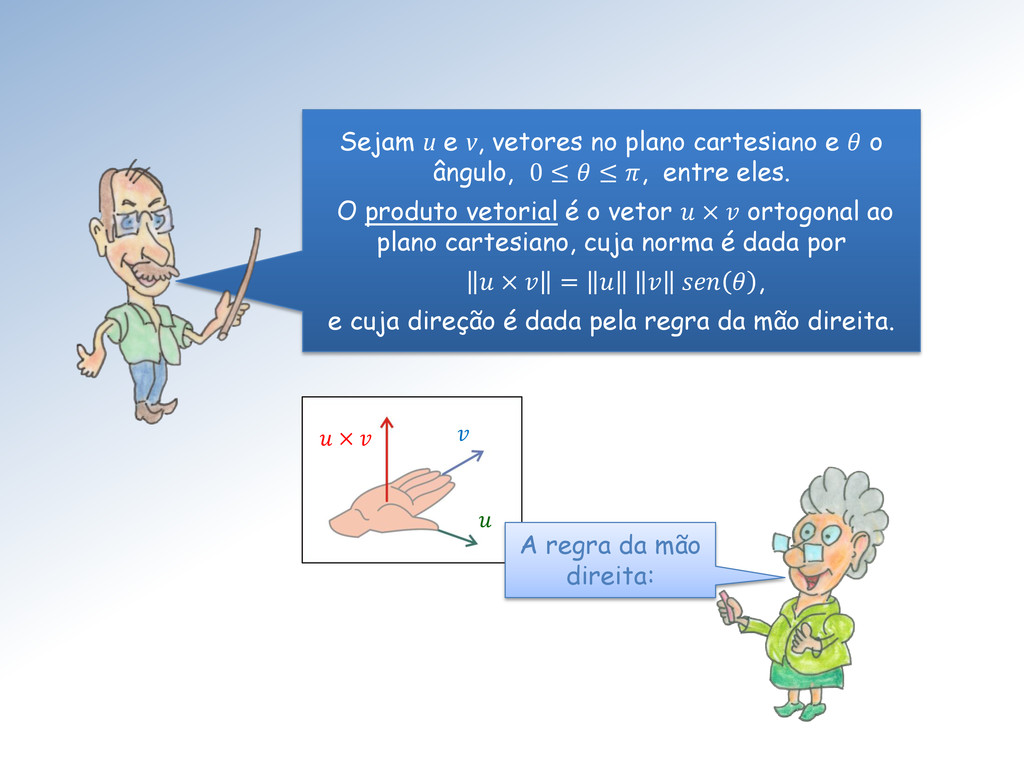
ângulo, 0 ≤ ≤ , entre eles. O produto vetorial é o vetor × ortogonal ao plano cartesiano, cuja norma é dada por × = , e cuja direção é dada pela regra da mão direita. × A regra da mão direita:
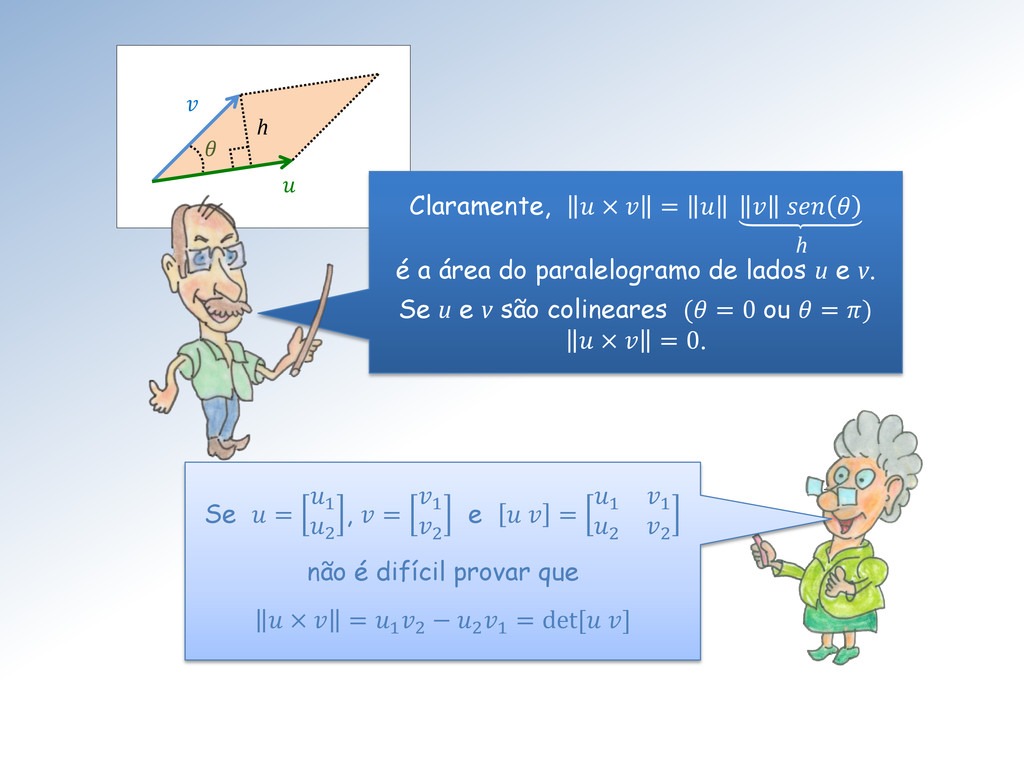
() • cos ()2 + ()2 = 1 • cos = , você garante que × 2 = 2 2 − , 2 Expandindo o lado direito da última igualdade em termos das componentes de u e v, obtemos o resultado.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Mestre, escolha = [, ] e mostre a soma e](https://files.speakerdeck.com/presentations/46bd1be09503013076fb6e899cf2bb4e/slide_27.jpg){kind=link}
![Aqui estamos pedindo o intervalo [a, b] e gerando o](https://files.speakerdeck.com/presentations/46bd1be09503013076fb6e899cf2bb4e/slide_28.jpg){kind=link}
{kind=link}
![Observem que para cada ponto x em [0 ,1], a](https://files.speakerdeck.com/presentations/46bd1be09503013076fb6e899cf2bb4e/slide_30.jpg){kind=link}
![Aqui estamos pedindo o intervalo [a, b], gerando o código](https://files.speakerdeck.com/presentations/46bd1be09503013076fb6e899cf2bb4e/slide_31.jpg){kind=link}
{kind=link}
![Observem que para cada ponto x em [-1 ,1], a](https://files.speakerdeck.com/presentations/46bd1be09503013076fb6e899cf2bb4e/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![As funções contínuas em [0, 1] constituem um subespaço de](https://files.speakerdeck.com/presentations/46bd1be09503013076fb6e899cf2bb4e/slide_40.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}