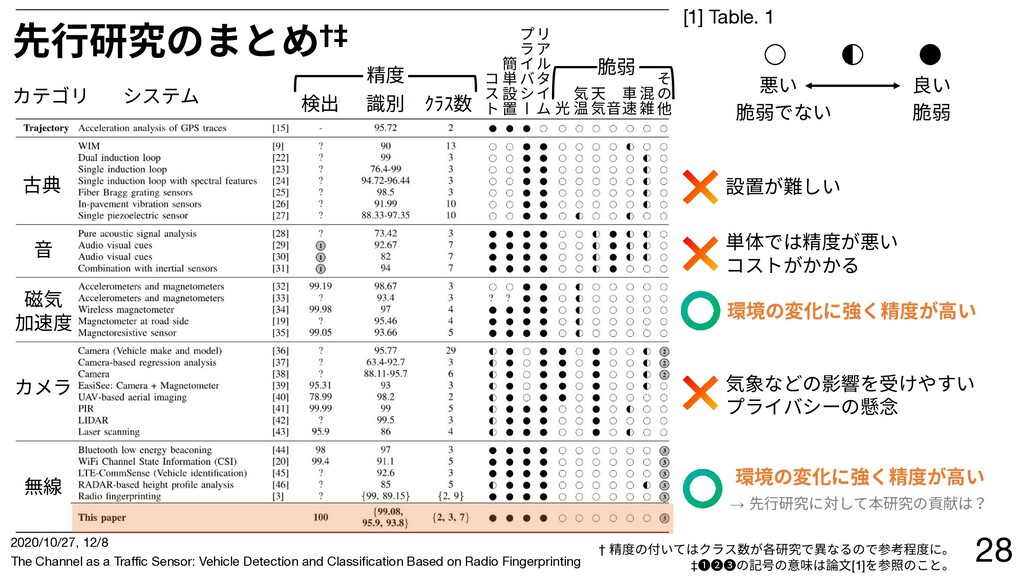
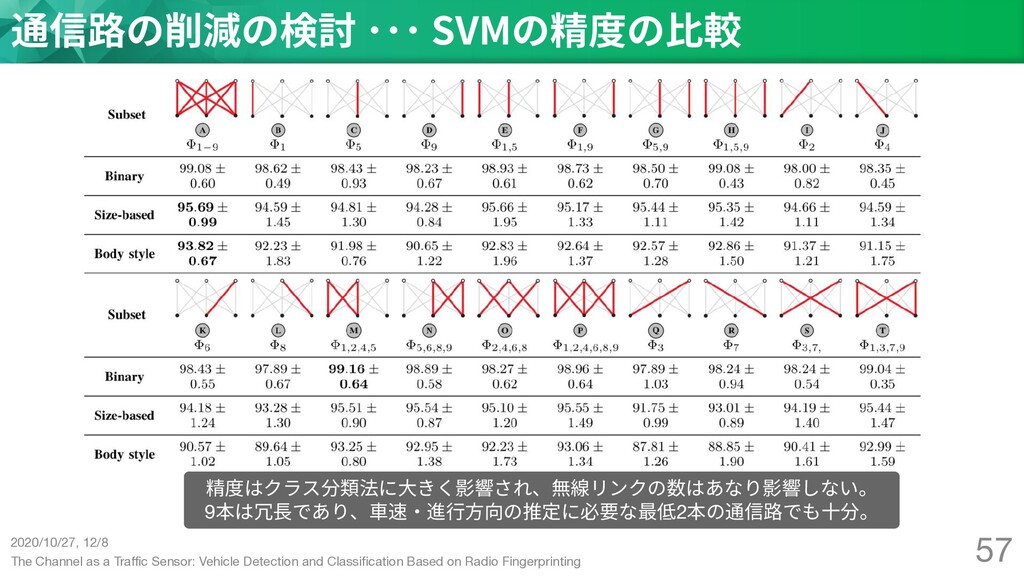
and Classification Based on Radio Fingerprinting 66 参考⽂献 [1] B. Sliwa, N. Piatkowski, C. Wietfeld, “The Channel as a Traffic Sensor: Vehicle Detection and Classification Based on Radio Fingerprinting,” IEEE Internet of Things Journal, Vol.7, No.8, pp.7392-7406, 2020年. [2] 国⼟交通省道路局, “道路・交通・⾞両分野における情 報化実施指針,” (WEBページ), https://www.mlit.go.jp/road /ITS/j-html/now/yosan/keikaku/page1.html [3] H. Rafai, N. Bitar, J. Schettler, O. A. Kalaa, “The Study of Vehicle Classification Equipment with Solutions to I mprove Accuracy in Oklahoma,” 2014年12⽉. [4] 国⼟交通省, “⾃動⾞の種類,” (電⼦書類), https://www. mlit.go.jp/common/001324210.pdf [5] V. Torgeir, “NorSIKT–Nordic System for Intelligent Cl assification of Traffic,” Procedia - Social and Behavioral Sciences, Vol.48, pp.1702-1712, 2012年12⽉. [6] H. Sulaiman, A. Mohd, O. Mohd, H. Mohamad, M. Sai d, M. Alice, “Wireless based Smart Parking System usi ng Zigbee,” International Journal of Engineering and Tec hnology, Vol.5, pp.3282-3300, 2013年8⽉. [7] “Induction loop,” Wikipedia, https://en.wikipedia.org/ wiki/Induction_loop [8] Visco India, “Bending Plate Weigh in Motion (WIM) Manufacturer,” (Webページ), 2019年4⽉, https://medium. com/@viscoscales/bending-plate-weigh-in-motion-320f4 a080073 [9] “FBG光ファイバセンシングシステム,” (WEBページ), 株式会社東京測器研究所, https://tml.jp/knowledge/specia l_ins/fiber_measurement.html [10] H. Y. Tam, S. Y. Liu, B. O. Guan, W. H. Chung, T. H. T. Chan, L. K. Cheng, “Fiber Bragg grating sensors for str uctural and railway applications,” Advanced Sensor Sy stems and Applications II, Vol.5634, pp.85-97, 2005年. ★おすすめ(分かりやすい, ⾯⽩い)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}