66 参考⽂献 [1] S. D. Regani, Q. Xu, B. Wang, M. Wu and K. J. R. Liu, "Driver Authentication for Smart Car Using Wireless S ensing," in IEEE Internet of Things Journal, vol. 7, no. 3, pp. 2235-2246, March 2020, doi: 10.1109/JIOT.2019.295 8692. [2] Q. Xu, Y. Chen, B. Wang and K. J. R. Liu, "Radio Bio metrics: Human Recognition Through a Wall," in IEEE Transactions on Information Forensics and Security, vol. 1 2, no. 5, pp. 1141-1155, May 2017, doi: 10.1109/TIFS.20 16.2647224. [3] 志村拓也. 時間反転波 (位相共役波) の海洋⾳響技術へ の応⽤. ⽇本⾳響学会誌, 2009, 65.12: 613-618. [4] 黒⽥和男, et al. ⽣研公開講演: 時を遡る波: 位相共役光 学. ⽣産研究, 48.10: 491-501. [5] C. Chen, Y. Chen, Y. Han, H. Lai and K. J. R. Liu, "Ac hieving Centimeter-Accuracy Indoor Localization on WiFi Platforms: A Frequency Hopping Approach," in I EEE Internet of Things Journal, vol. 4, no. 1, pp. 111-121, Feb. 2017, doi: 10.1109/JIOT.2016.2628701. [6] ⽔⾕優秀, et al. モバイル端末の Wi-Fi チャネル状態情 報を⽤いた混雑状況推定の検討. 研究報告⾼度交通システ ムとスマートコミュニティ (ITS), 2018, 2018.2: 1-4. [7] “Channel State Information,”(Webページ), Wikipedia, https://en.wikipedia.org/wiki/Channel_state_information [8] “位相⾓のシフト - unwrap,”(Webページ), MathWorks, https://jp.mathworks.com/help/matlab/ref/unwrap.html [9] Y. Chen et al., "Time-Reversal Wireless Paradigm fo r Green Internet of Things: An Overview," in IEEE Inter net of Things Journal, vol. 1, no. 1, pp. 81-98, Feb. 2014, doi: 10.1109/JIOT.2014.2308838. ★おすすめ(分かりやすい, ⾯⽩い)
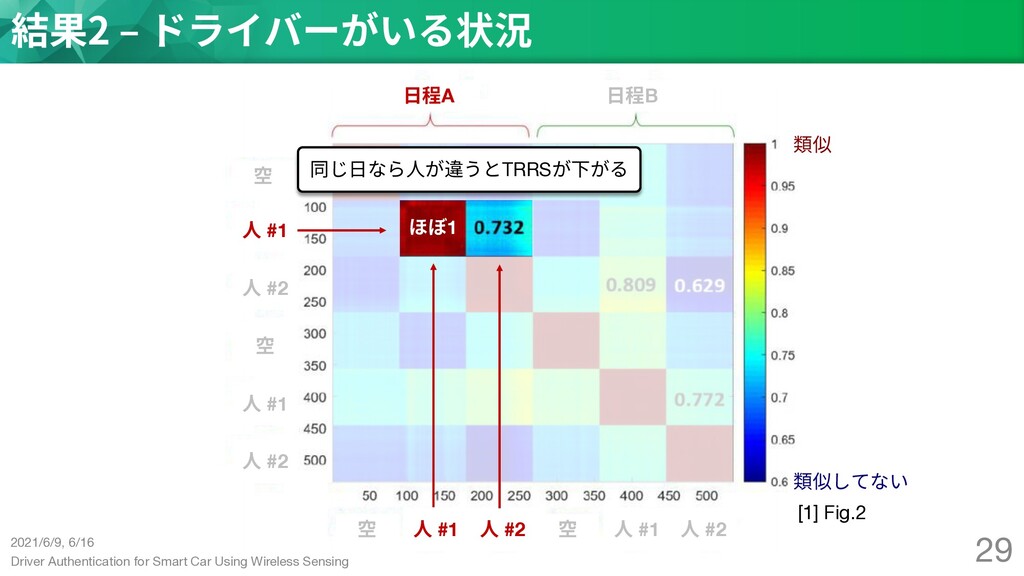
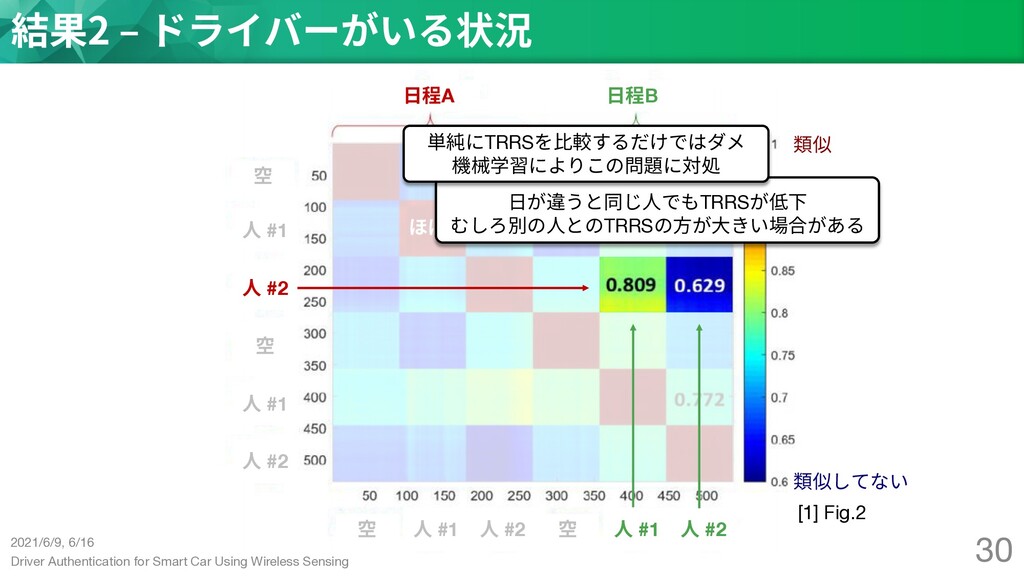
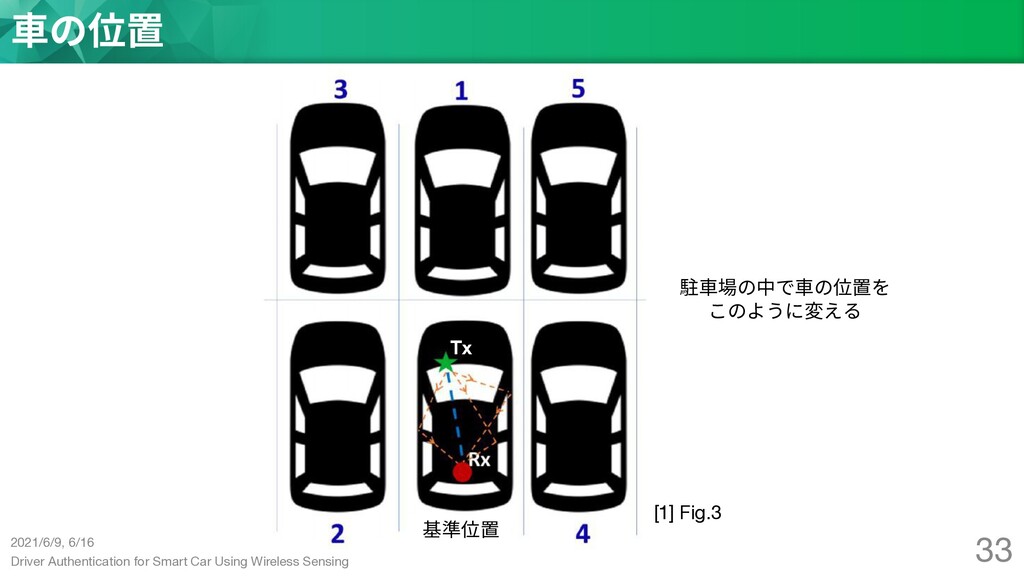
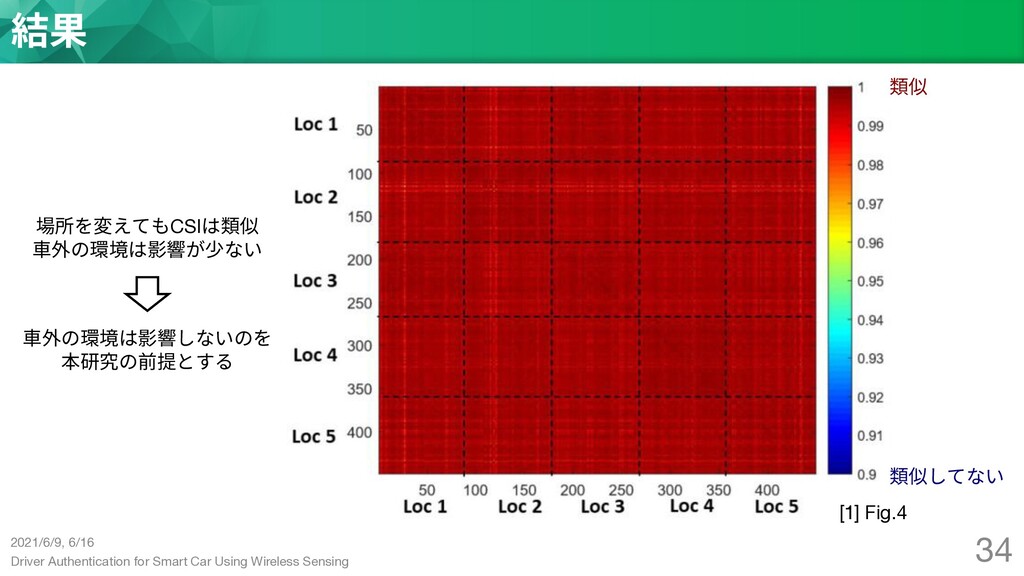
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}