Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
iPhoneで自動運転してきた
Search
Satoshi Gachi Fujimoto
February 09, 2020
Technology
0
600
iPhoneで自動運転してきた
Kumamoto HoloLens ミートアップ vol.4の資料です。
https://hololens.connpass.com/event/162325/
Satoshi Gachi Fujimoto
February 09, 2020
Tweet
Share
More Decks by Satoshi Gachi Fujimoto
See All by Satoshi Gachi Fujimoto
忘年会LT(2025)
satoshirobatofujimoto
0
38
バスあと何分ミニサイネージ
satoshirobatofujimoto
0
130
高専で制御を、大学でセンシングを学び、次は脳みそ
satoshirobatofujimoto
0
310
画像生成AIを使って勝負しよう
satoshirobatofujimoto
1
150
ガチマナ会 vol.1
satoshirobatofujimoto
0
270
画像生成AIを使って勝負しよう
satoshirobatofujimoto
0
290
画像からプロンプトを考えて最も似ている画像を生成した人が勝ちのゲーム@AIミーティング
satoshirobatofujimoto
0
200
VPS研究者が語る”VPS概論”
satoshirobatofujimoto
0
460
画像からプロンプトを考えて最も似ている画像を生成した人が勝ちのゲーム
satoshirobatofujimoto
0
240
Other Decks in Technology
See All in Technology
SREのプラクティスを用いた3領域同時 マネジメントへの挑戦 〜SRE・情シス・セキュリティを統合した チーム運営術〜
coconala_engineer
2
780
AWS Network Firewall Proxyを触ってみた
nagisa53
1
250
10Xにおける品質保証活動の全体像と改善 #no_more_wait_for_test
nihonbuson
PRO
2
340
データの整合性を保ちたいだけなんだ
shoheimitani
8
3.2k
顧客の言葉を、そのまま信じない勇気
yamatai1212
1
370
ランサムウェア対策としてのpnpm導入のススメ
ishikawa_satoru
0
230
AIが実装する時代、人間は仕様と検証を設計する
gotalab555
1
630
こんなところでも(地味に)活躍するImage Modeさんを知ってるかい?- Image Mode for OpenShift -
tsukaman
1
170
ECS障害を例に学ぶ、インシデント対応に備えた AIエージェントの育て方 / How to develop AI agents for incident response with ECS outage
iselegant
4
450
ブロックテーマでサイトをリニューアルした話 / 2026-01-31 Kansai WordPress Meetup
torounit
0
480
OpenShiftでllm-dを動かそう!
jpishikawa
0
140
Agent Skils
dip_tech
PRO
0
140
Featured
See All Featured
Rails Girls Zürich Keynote
gr2m
96
14k
Making Projects Easy
brettharned
120
6.6k
The browser strikes back
jonoalderson
0
420
Docker and Python
trallard
47
3.7k
Product Roadmaps are Hard
iamctodd
PRO
55
12k
From Legacy to Launchpad: Building Startup-Ready Communities
dugsong
0
140
Test your architecture with Archunit
thirion
1
2.2k
Neural Spatial Audio Processing for Sound Field Analysis and Control
skoyamalab
0
180
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
231
22k
VelocityConf: Rendering Performance Case Studies
addyosmani
333
24k
Leo the Paperboy
mayatellez
4
1.4k
Build your cross-platform service in a week with App Engine
jlugia
234
18k
Transcript
2020/02/09 Kumamoto HoloLens Meetup Vol.4 iPhoneで⾃動運転してきた
⾃⼰紹介 ガチ本 です co-founder KumaMCN ナレッジコミュニケーション R&D戦略チーム AWS ML コンピテンシーパートナー
Microsoft Mixed Reality Partner CV / SLAM / WHILL / Python satoshi.gachi.fujimoto @sotongshi
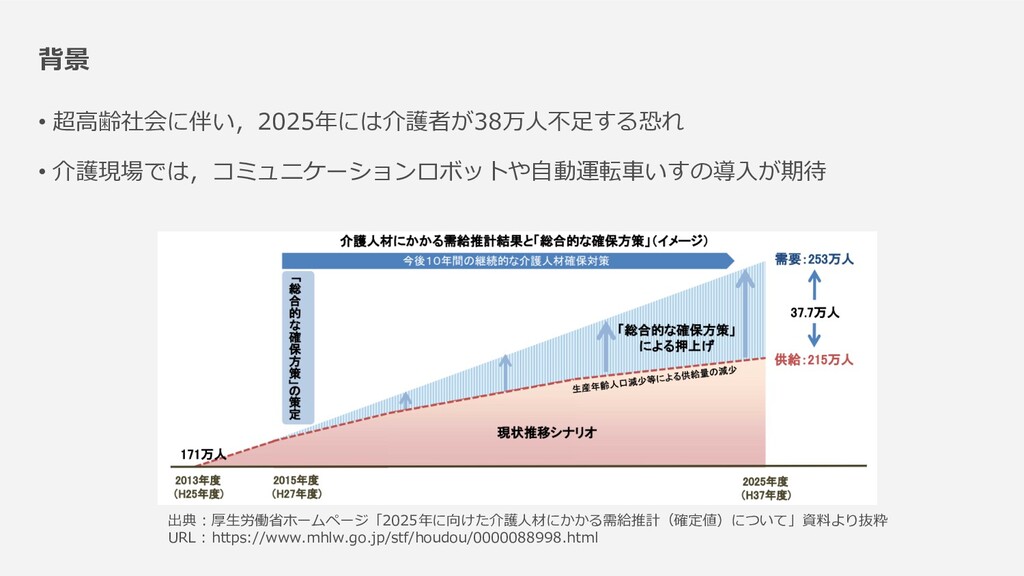
背景 • 超⾼齢社会に伴い,2025年には介護者が38万⼈不⾜する恐れ • 介護現場では,コミュニケーションロボットや⾃動運転⾞いすの導⼊が期待 出典 : 厚⽣労働省ホームページ「2025年に向けた介護⼈材にかかる需給推計(確定値)について」資料より抜粋 URL :
https://www.mhlw.go.jp/stf/houdou/0000088998.html
⽬的 • ⾃動運転技術により,⼈⼿不⾜の課題を解決 • ⼈や環境の違いをAIがサポートし,多様性社会の課題を解決 出典 : 落合陽⼀⽒のTwitterより抜粋 URL :
https://twitter.com/ochyai/status/863280246140698624/photo/1
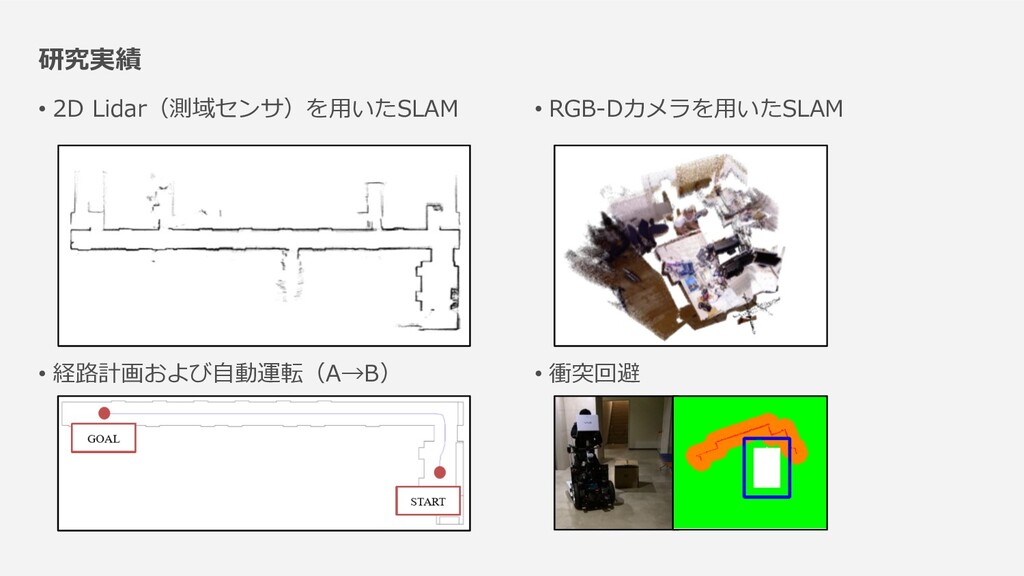
研究実績 • 2D Lidar(測域センサ)を⽤いたSLAM • 経路計画および⾃動運転(A→B) • RGB-Dカメラを⽤いたSLAM • 衝突回避
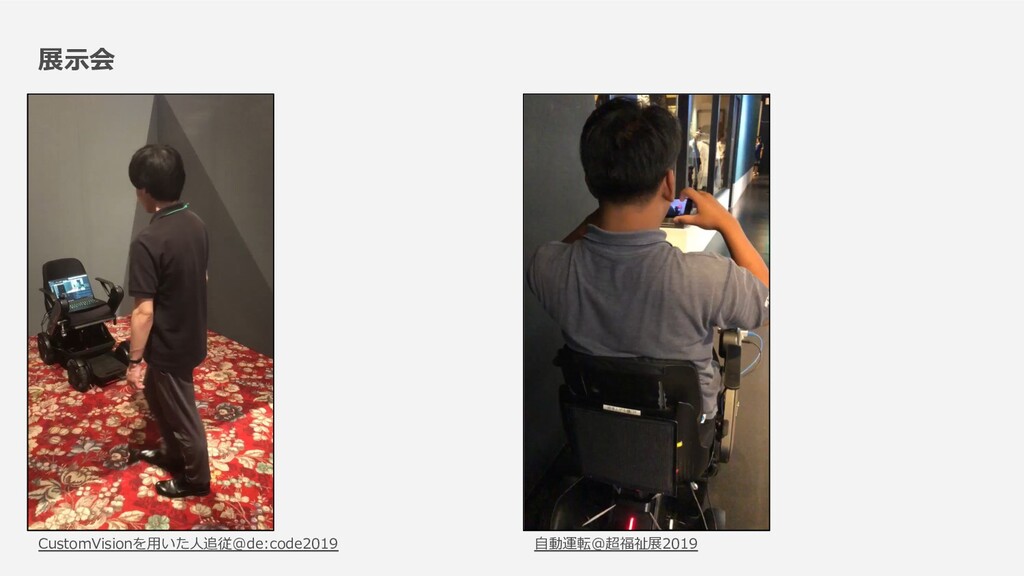
展⽰会 ⾃動運転@超福祉展2019 CustomVisionを⽤いた⼈追従@de:code2019
システム概要(ハードウェア) • WHILL Model CR • SLAM⽤のセンサ︓Intel RealSense T265 および
D435 • 制御⽤PC(Windows10, Core i7,RAM 8GB,SSD 1TB) • ⽂字・画像表⽰⽤LED • マップ表⽰およびゴール指定⽤タブレット PCもしくはディスプレイ
システム概要(ソフトウェア) • プログラミング⾔語︓Python 3.6.9 • 主なライブラリ︓WHILL Model CR SDK,Intel RealSense
SDK,OpenCV,Open3D 初期位置推定 マップデータベース ⾃⼰位置推定 Visual Odometry ローカルマップ作成 Mapping 衝突回避 Obstacle Avoidance 経路計画 Local Path Planning ゴール指定 Global Path Planning 制御 Control
マップ作成 • SLAMによるマップ作成の様⼦
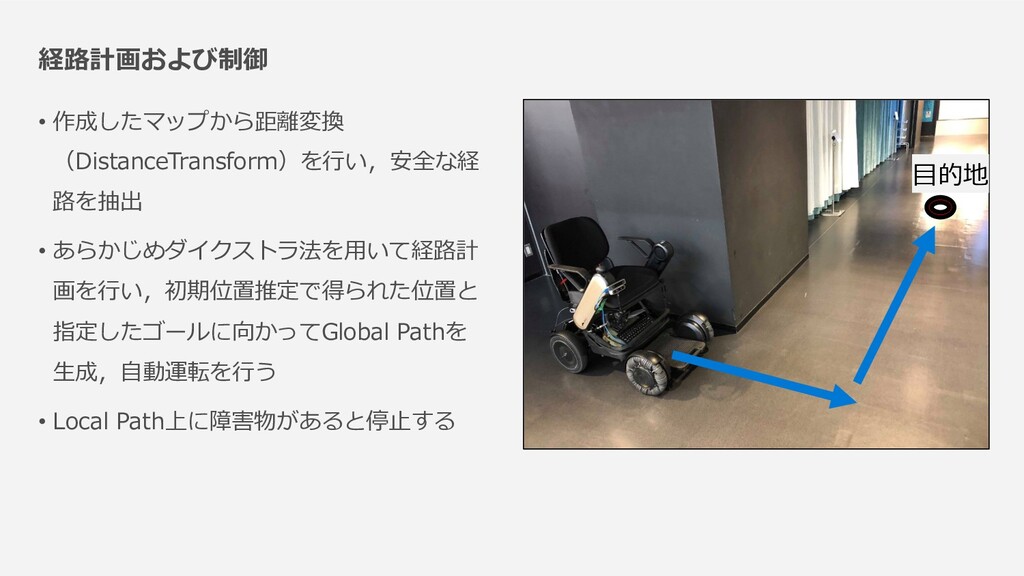
経路計画および制御 • 作成したマップから距離変換 (DistanceTransform)を⾏い,安全な経 路を抽出 • あらかじめダイクストラ法を⽤いて経路計 画を⾏い,初期位置推定で得られた位置と 指定したゴールに向かってGlobal Pathを
⽣成,⾃動運転を⾏う • Local Path上に障害物があると停⽌する ⽬的地
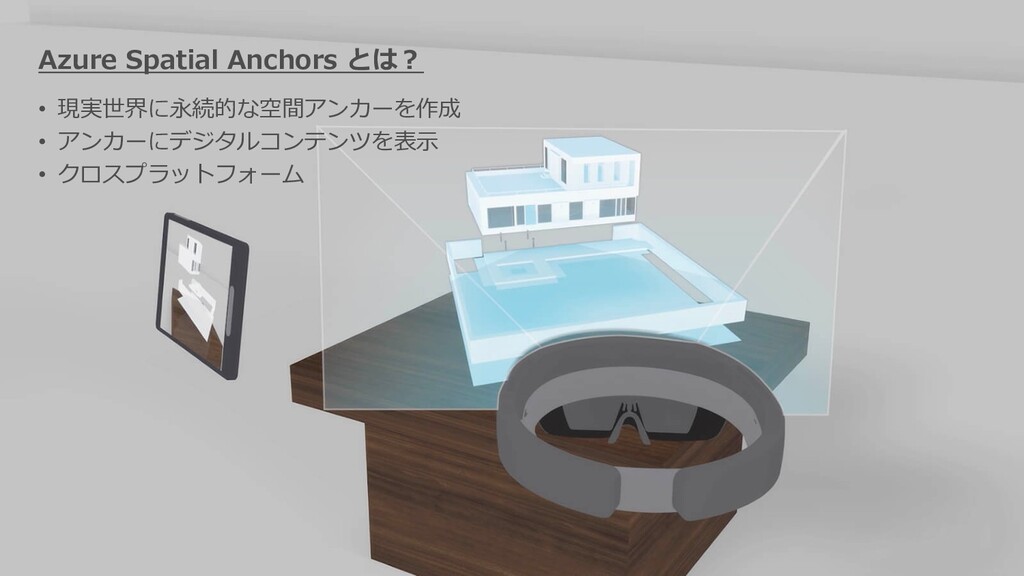
Azure Spatial Anchors とは︖ • 現実世界に永続的な空間アンカーを作成 • アンカーにデジタルコンテンツを表⽰ • クロスプラットフォーム
͍Θ͖ࢢདྷञҪ۠෮ڵެӦॅ
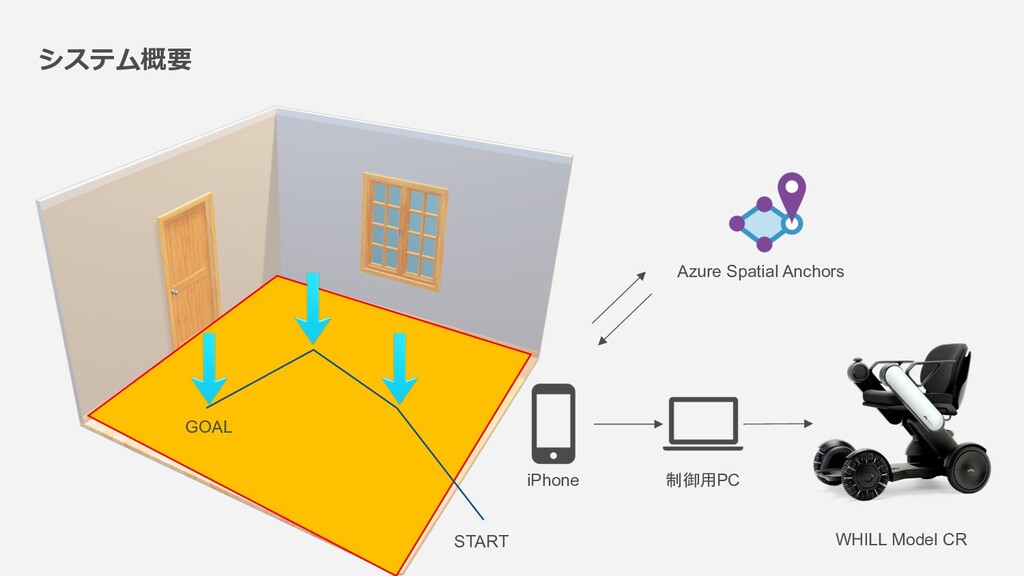
システム概要 WHILL Model CR 制御用PC iPhone GOAL Azure Spatial Anchors
START
空間をスキャン
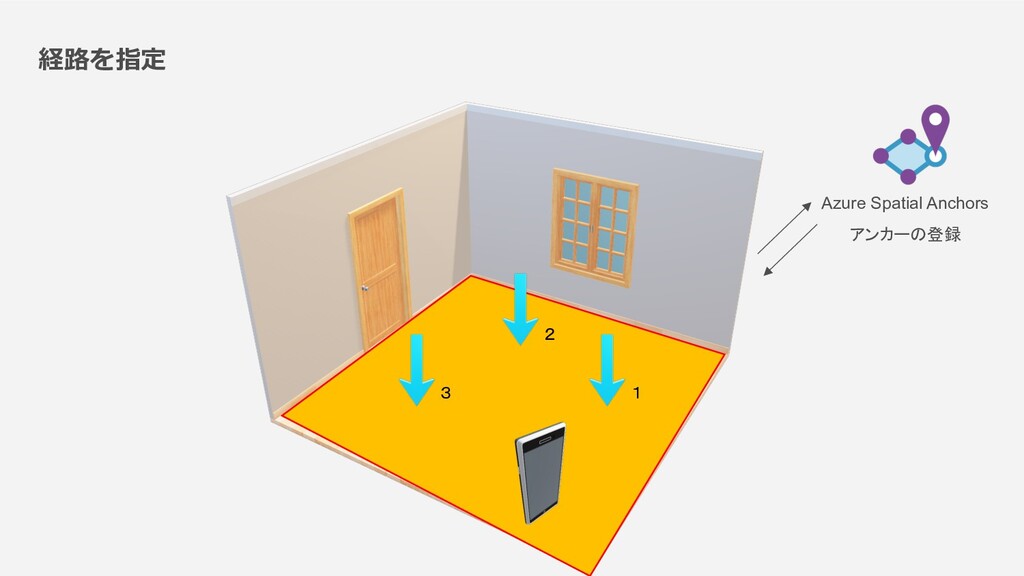
経路を指定 1 2 3 Azure Spatial Anchors アンカーの登録
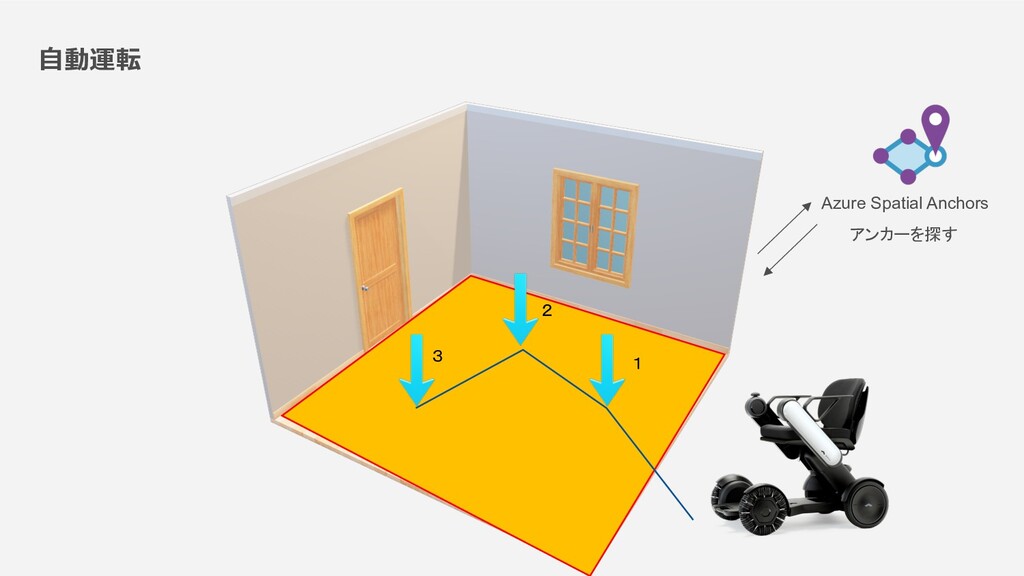
⾃動運転 1 2 3 Azure Spatial Anchors アンカーを探す
デモ • 経路指定 • ⾃動運転
まとめ • iPhoneを載せるだけで⾃動運転できた • マイ経路案内をみんなで共有するアプリとしてまずはリリースしていく
HoloLens2 体験 • ナレコムVR2 • 3Dモデルビューアー • プレイグラウンド • ⿃が寄ってくる
• アイトラッキングによるオートスクロール • ハンドトラッキングによるピアノ演奏 • Surfaces • 様々なシェーダーが楽しめる触る球体 • Graffiti 3D • 空間にお絵かき • MRTK Examples Hub • MRTKのサンプル • Type in Space • 空間に⽂字を配置
イベント告知 • 熊本GTFS-JP活⽤勉強会 vol.1 • Yo! Tech Night? 4 ⽇時
2020/3/4(⽔) 19:00-21:00 場所 えきまえスペース(熊本駅⽩川⼝前) 参加費 500円(会場代) ⽇時 2020/2/12(⽔) 19:00-21:00 場所 えきまえスペース(熊本駅⽩川⼝前) 参加費 500円(会場代)
ご清聴ありがとうございました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}