Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
VPS入門
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Satoshi Gachi Fujimoto
November 30, 2022
Technology
180
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
VPS入門
XR Kaigi 2022 HoloLens Meetup の登壇資料です
Satoshi Gachi Fujimoto
November 30, 2022
More Decks by Satoshi Gachi Fujimoto
See All by Satoshi Gachi Fujimoto
忘年会LT(2025)
satoshirobatofujimoto
0
65
バスあと何分ミニサイネージ
satoshirobatofujimoto
0
150
高専で制御を、大学でセンシングを学び、次は脳みそ
satoshirobatofujimoto
0
340
画像生成AIを使って勝負しよう
satoshirobatofujimoto
1
180
ガチマナ会 vol.1
satoshirobatofujimoto
0
280
画像生成AIを使って勝負しよう
satoshirobatofujimoto
0
340
画像からプロンプトを考えて最も似ている画像を生成した人が勝ちのゲーム@AIミーティング
satoshirobatofujimoto
0
230
VPS研究者が語る”VPS概論”
satoshirobatofujimoto
0
490
画像からプロンプトを考えて最も似ている画像を生成した人が勝ちのゲーム
satoshirobatofujimoto
0
260
Other Decks in Technology
See All in Technology
AI x 開発生産性を取り巻く予算戦略と投資対効果
i35_267
1
280
kaonavi Tech Night#1
kaonavi
0
120
Oracle Base Database Service 技術詳細
oracle4engineer
PRO
15
110k
SoccerMaster: A Vision Foundation Model for Soccer Understanding
kzykmyzw
0
150
関数型の考えを TypeScript に持ち込んで、テストしやすい純粋関数を増やす / Pure at the Core, Effects at the Edge: Bringing Functional Thinking into TypeScript
kaminashi
2
130
「AIに依存している」と 「AIを使いこなしている」の違い
k8yasuma
0
120
Type-safe IaC for Dart
coborinai
0
160
ruby.wasmとPicoRuby.wasmに対応した仮想DOMライブラリを作ってる話 #kaigieffect_kaigi
sue445
PRO
0
150
AI Coding Agent時代のcdk-nagガードレール 〜組織ルールを強制CIで守り抜く設計の挑戦〜
mhrtech
3
440
Network Firewallやっていき!
news_it_enj
0
170
穢れた技術選定について
watany
18
5.7k
脱金融のフューチャー・デザイン / Future Design Beyond Finance
ks91
PRO
0
160
Featured
See All Featured
Why Your Marketing Sucks and What You Can Do About It - Sophie Logan
marketingsoph
0
280
Digital Ethics as a Driver of Design Innovation
axbom
PRO
1
350
How to train your dragon (web standard)
notwaldorf
97
6.7k
Faster Mobile Websites
deanohume
310
32k
Conquering PDFs: document understanding beyond plain text
inesmontani
PRO
4
2.9k
Deep Space Network (abreviated)
tonyrice
0
230
How to build a perfect <img>
jonoalderson
1
5.8k
Principles of Awesome APIs and How to Build Them.
keavy
128
18k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
From π to Pie charts
rasagy
0
240
Unlocking the hidden potential of vector embeddings in international SEO
frankvandijk
0
870
How To Stay Up To Date on Web Technology
chriscoyier
790
250k
Transcript
株式会社ナレッジコミュニケーション 藤本賢志(がちもとさん) XR Kaigi 2022 VPS入門
自己紹介 藤本賢志(ふじもとさとし) ニックネーム:がちもとさん 株式会社ナレッジコミュニケーション R&D戦略チーム Co-founder KumaMCN 高専で制御を、大学でセンシングを学び、次は脳みそ ARナビや電動車いすの自動運転に関する研究開発 専門は、コンピュータビジョン、画像処理、制御工学
Twitterフォローお願いします! @sotongshi
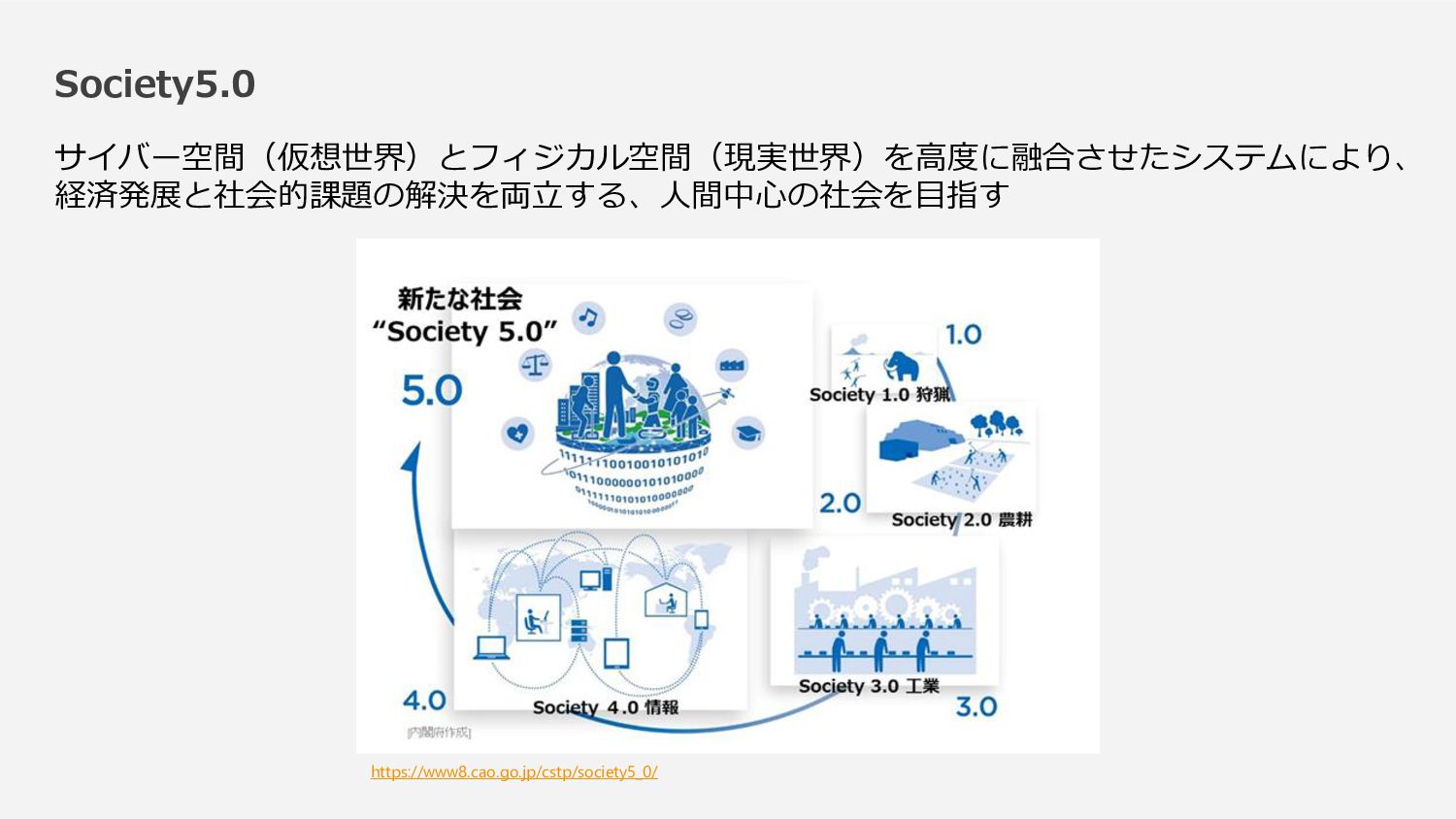
Society5.0 サイバー空間(仮想世界)とフィジカル空間(現実世界)を高度に融合させたシステムにより、 経済発展と社会的課題の解決を両立する、人間中心の社会を目指す https://www8.cao.go.jp/cstp/society5_0/
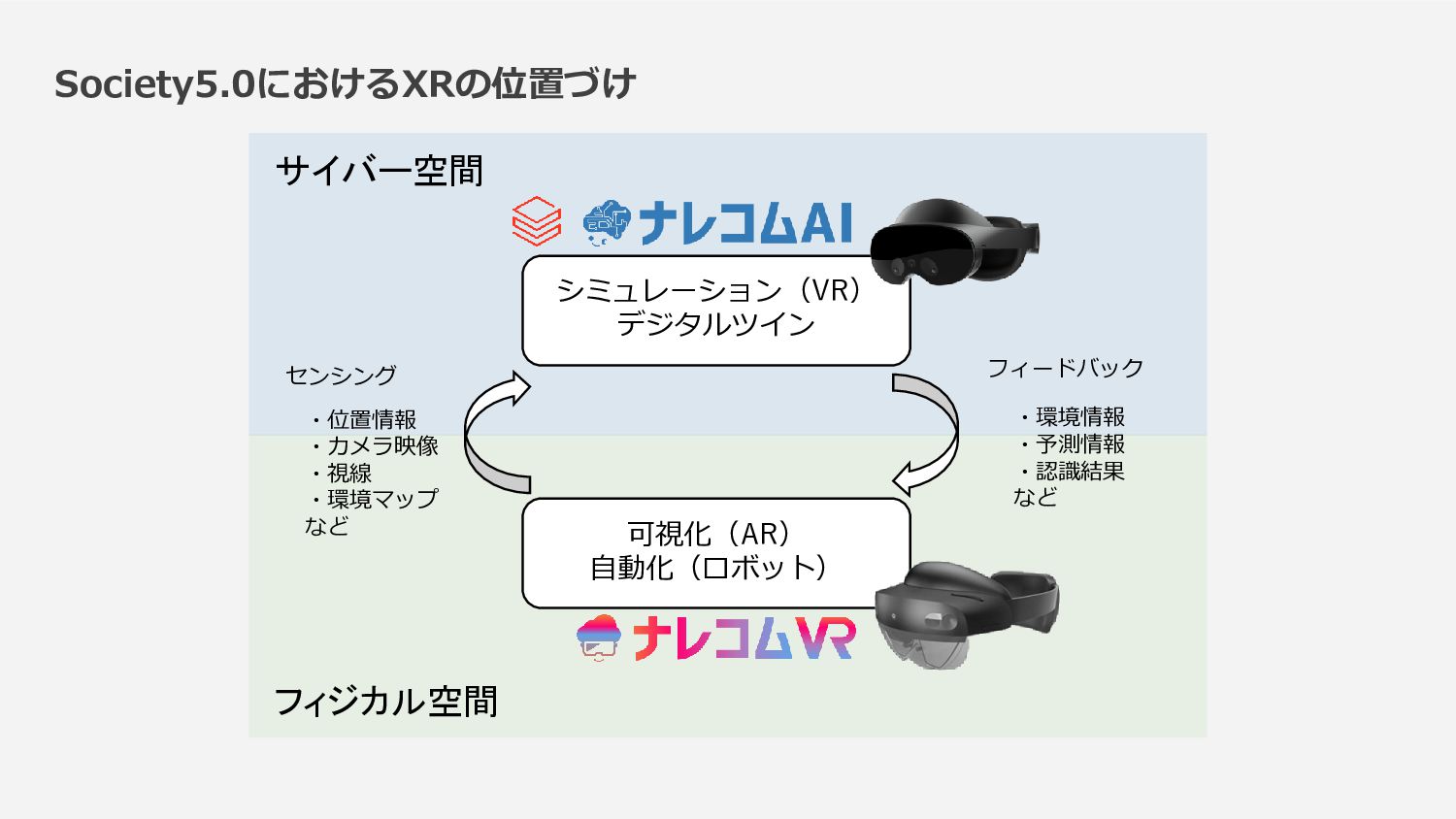
Society5.0におけるXRの位置づけ 可視化(AR) 自動化(ロボット) シミュレーション(VR) デジタルツイン センシング フィードバック ・位置情報 ・カメラ映像 ・視線
・環境マップ など ・環境情報 ・予測情報 ・認識結果 など サイバー空間 フィジカル空間
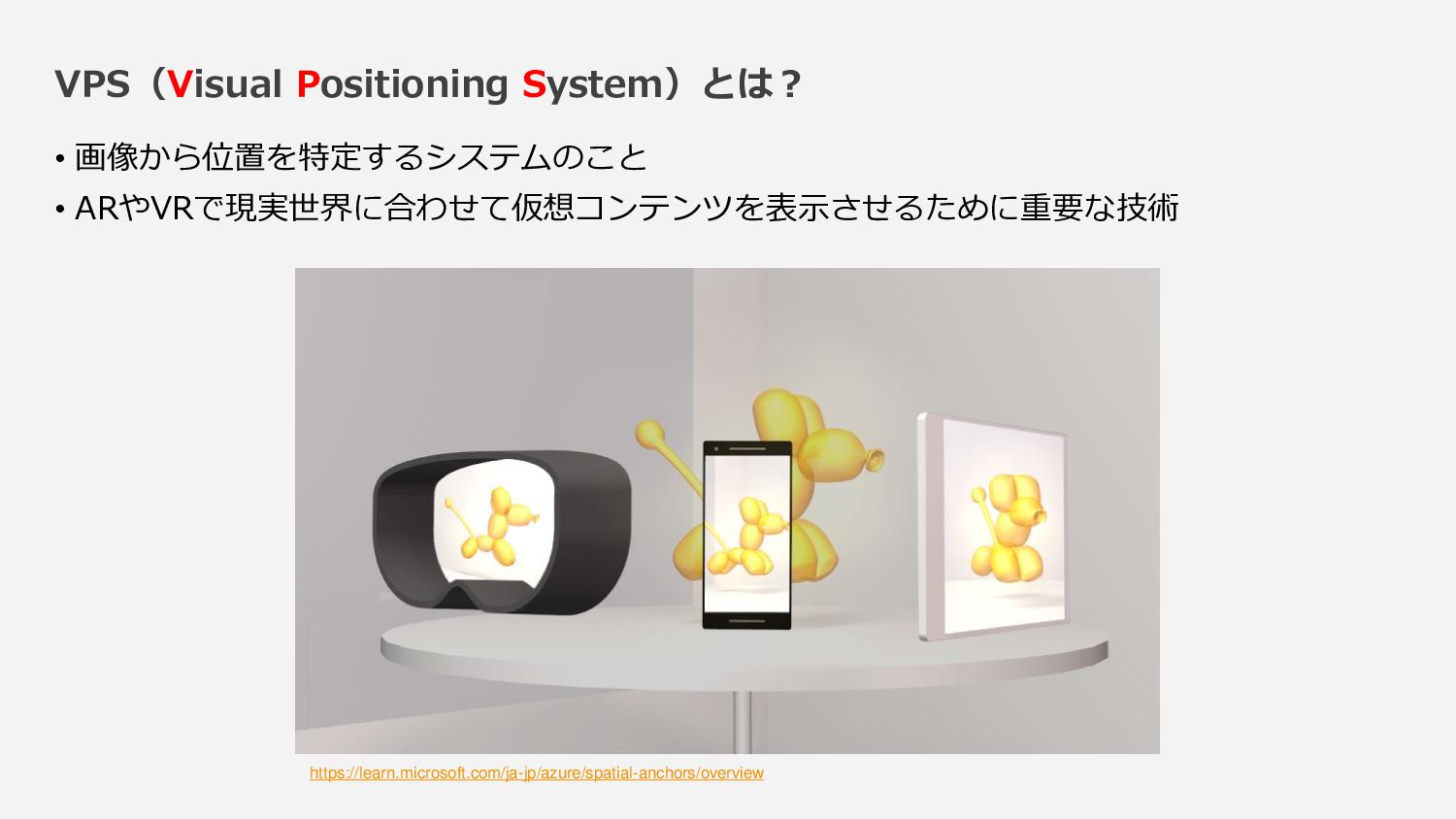
VPS(Visual Positioning System)とは? • 画像から位置を特定するシステムのこと • ARやVRで現実世界に合わせて仮想コンテンツを表示させるために重要な技術 https://learn.microsoft.com/ja-jp/azure/spatial-anchors/overview
AR/VRの主要機能 1. SLAM(カメラの位置推定&トラッキングとマップ作成) 2. 現実世界と仮想世界の位置合わせ 3. 仮想コンテンツの配置と表示
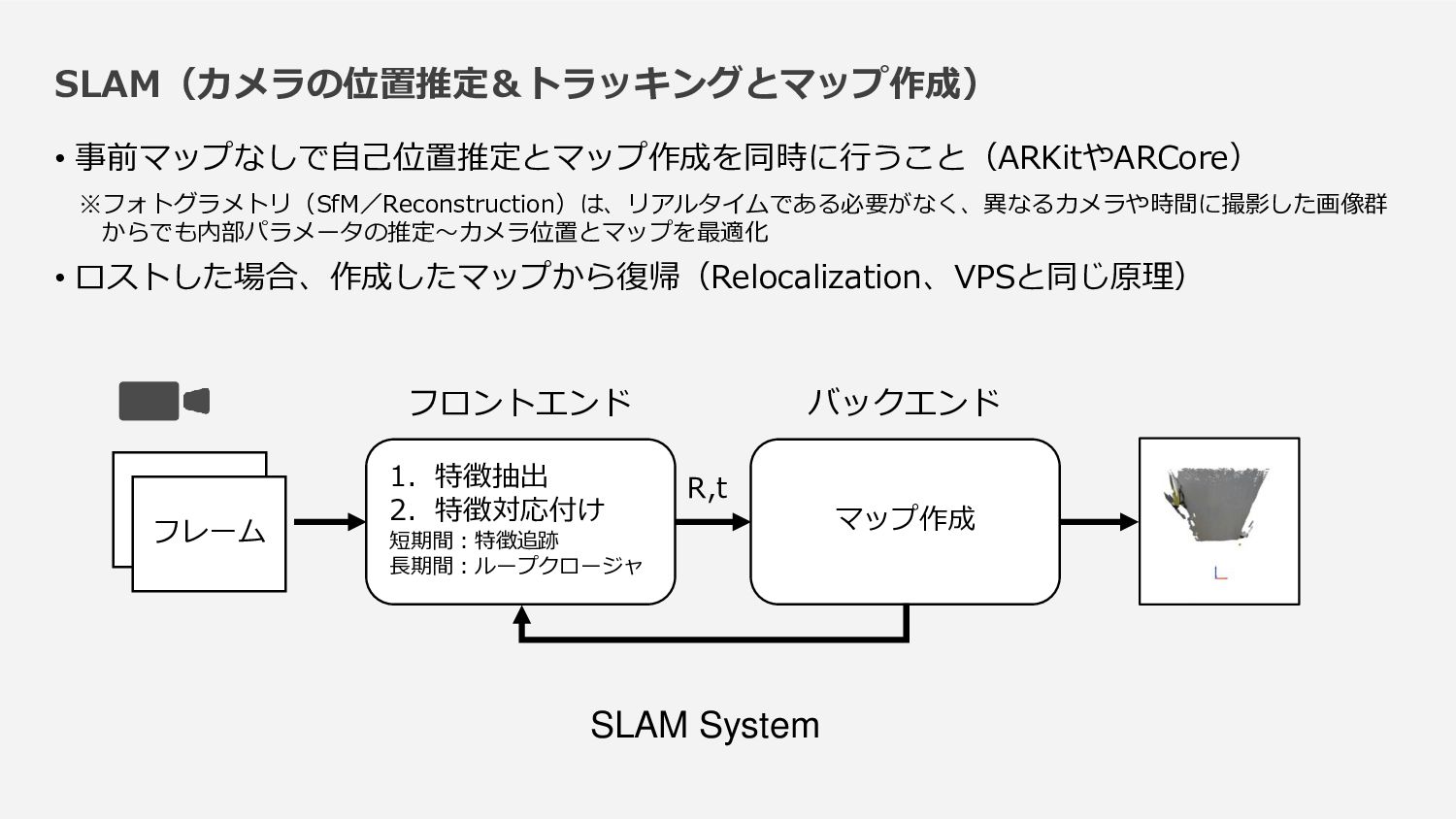
SLAM(カメラの位置推定&トラッキングとマップ作成) • 事前マップなしで自己位置推定とマップ作成を同時に行うこと(ARKitやARCore) ※フォトグラメトリ(SfM/Reconstruction)は、リアルタイムである必要がなく、異なるカメラや時間に撮影した画像群 からでも内部パラメータの推定~カメラ位置とマップを最適化 • ロストした場合、作成したマップから復帰(Relocalization、VPSと同じ原理) SLAM System 1.特徴抽出
2.特徴対応付け 短期間:特徴追跡 長期間:ループクロージャ フロントエンド マップ作成 バックエンド フレーム R,t
現実世界と仮想世界の位置合わせ • VPSなし • アプリ開始位置またはARマーカーが基準座標 • アプリ開始位置から計測して、現実世界に合わ せて表示するのは困難 • 物理的なマーカーが必要、それに合わせて表示
• VPSあり • 事前にSLAMなどでマップ作成が必要 • 事前マップが基準座標 • 事前マップ上にコンテンツを配置 https://youtu.be/pFn11hYZM2E https://youtu.be/udoSz_UBUdc 2007, http://kougaku-navi.net/ARToolKit/
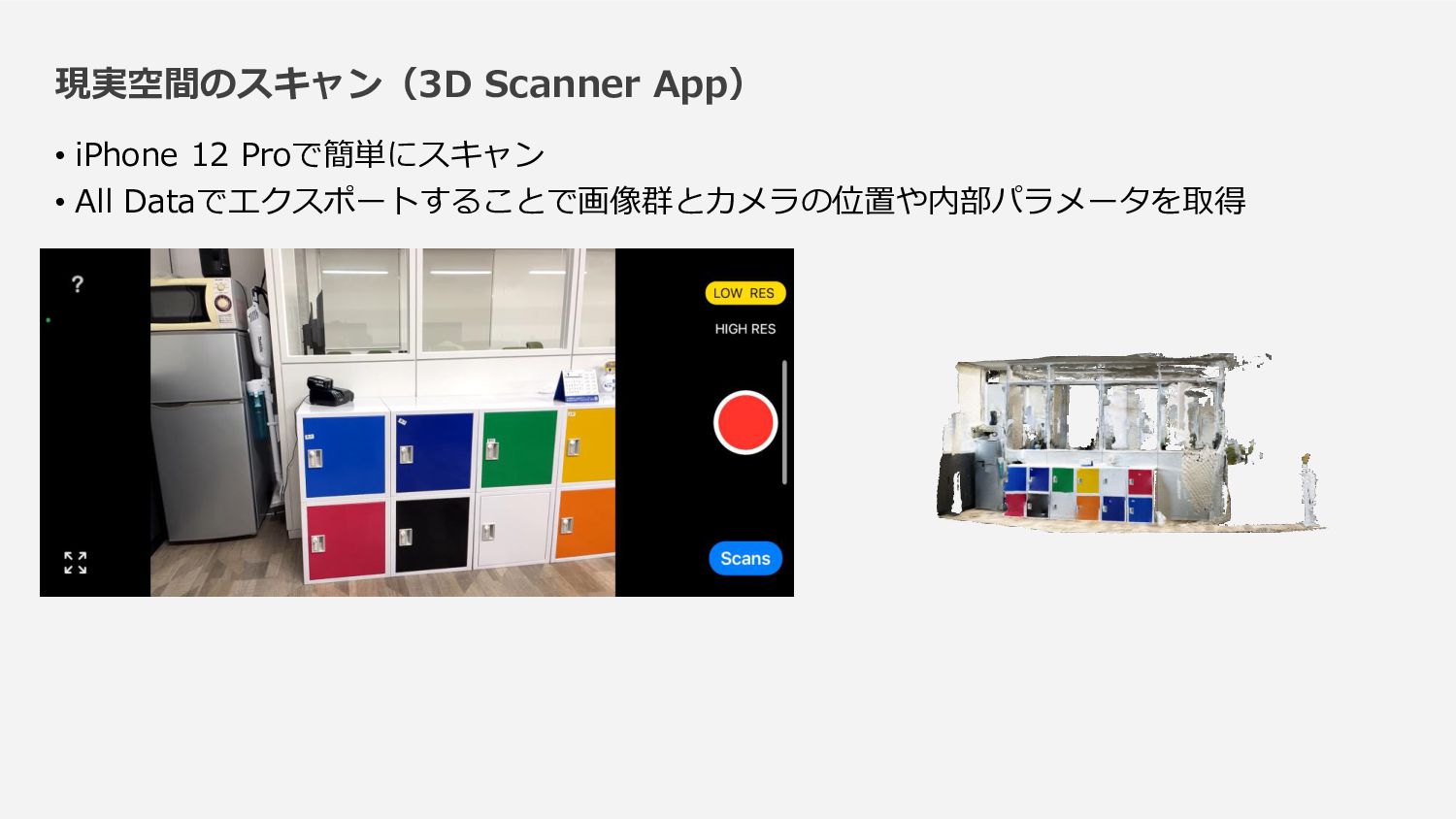
• iPhone 12 Proで簡単にスキャン • All Dataでエクスポートすることで画像群とカメラの位置や内部パラメータを取得 現実空間のスキャン(3D Scanner App)
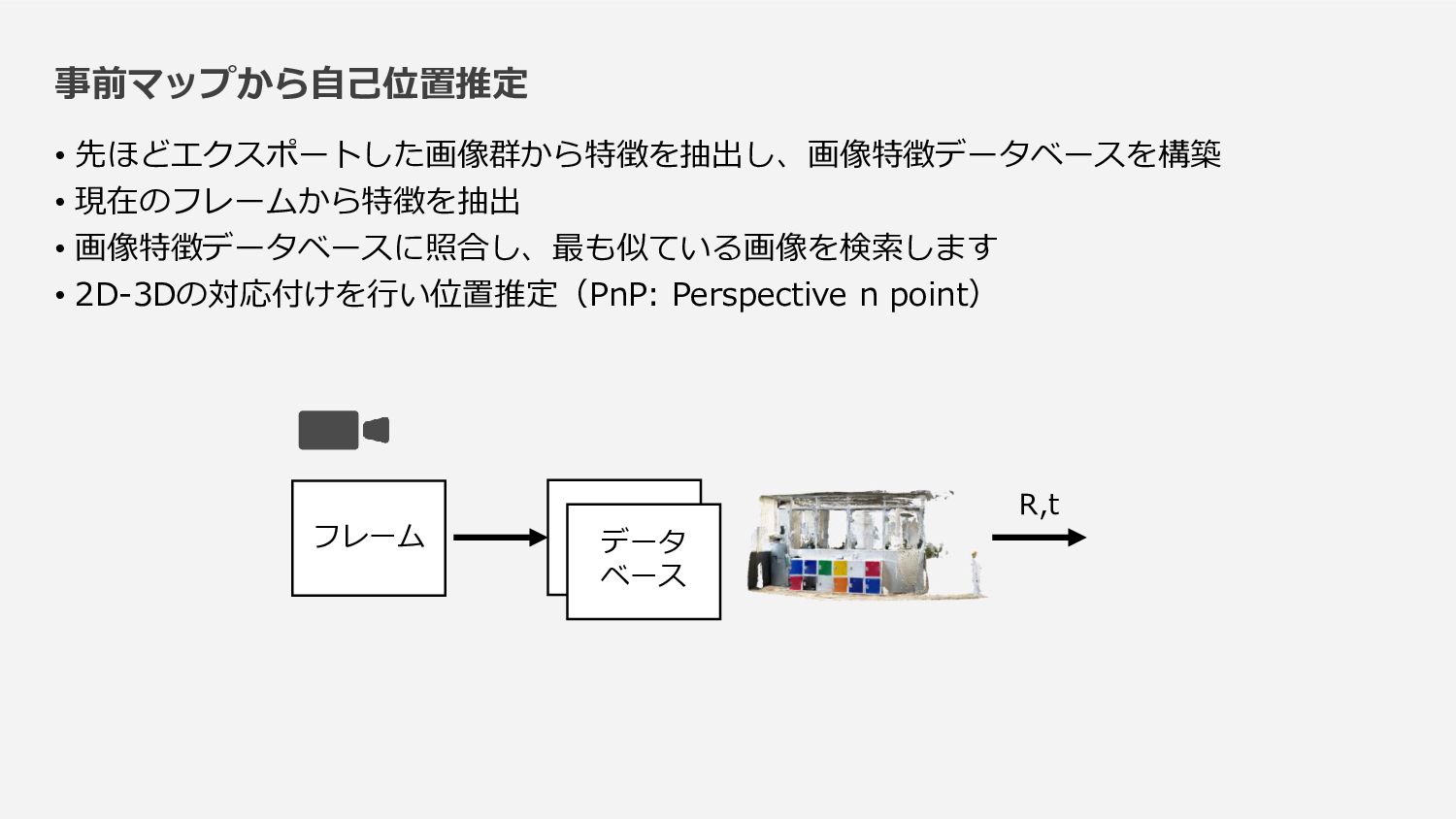
事前マップから自己位置推定 • 先ほどエクスポートした画像群から特徴を抽出し、画像特徴データベースを構築 • 現在のフレームから特徴を抽出 • 画像特徴データベースに照合し、最も似ている画像を検索します • 2D-3Dの対応付けを行い位置推定(PnP: Perspective
n point) データ ベース フレーム R,t
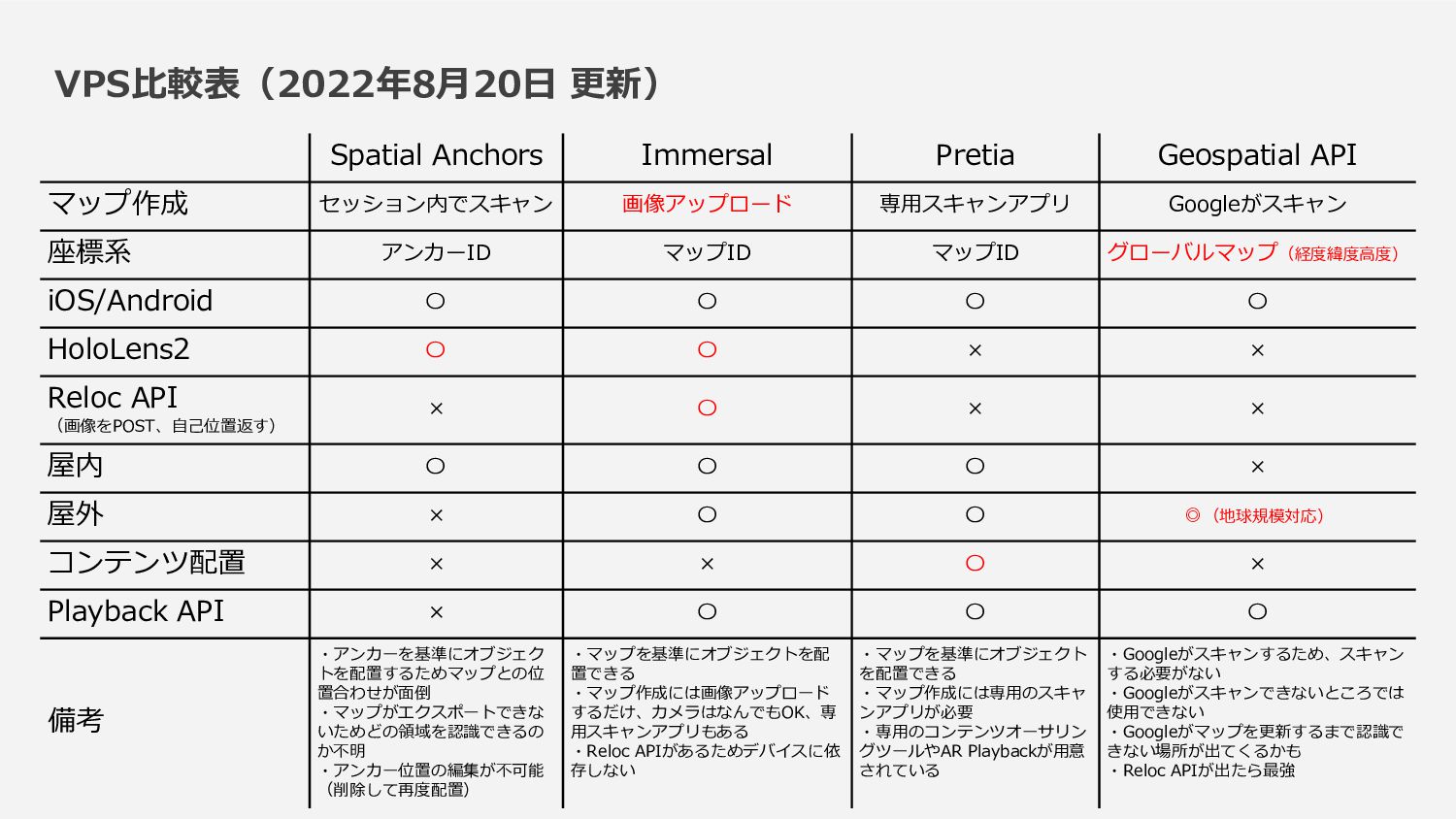
VPS比較表(2022年8月20日 更新) Spatial Anchors Immersal Pretia Geospatial API マップ作成 セッション内でスキャン
画像アップロード 専用スキャンアプリ Googleがスキャン 座標系 アンカーID マップID マップID グローバルマップ(経度緯度高度) iOS/Android 〇 〇 〇 〇 HoloLens2 〇 〇 × × Reloc API (画像をPOST、自己位置返す) × 〇 × × 屋内 〇 〇 〇 × 屋外 × 〇 〇 ◎(地球規模対応) コンテンツ配置 × × 〇 × Playback API × 〇 〇 〇 備考 ・アンカーを基準にオブジェク トを配置するためマップとの位 置合わせが面倒 ・マップがエクスポートできな いためどの領域を認識できるの か不明 ・アンカー位置の編集が不可能 (削除して再度配置) ・マップを基準にオブジェクトを配 置できる ・マップ作成には画像アップロード するだけ、カメラはなんでもOK、専 用スキャンアプリもある ・Reloc APIがあるためデバイスに依 存しない ・マップを基準にオブジェクト を配置できる ・マップ作成には専用のスキャ ンアプリが必要 ・専用のコンテンツオーサリン グツールやAR Playbackが用意 されている ・Googleがスキャンするため、スキャン する必要がない ・Googleがスキャンできないところでは 使用できない ・Googleがマップを更新するまで認識で きない場所が出てくるかも ・Reloc APIが出たら最強
Spatial Anchorsを用いたナビ作成アプリ「ナレコムVR」 • セッション内でアンカーを配置し、周辺をスキャン • アンカーに対してコンテンツを配置 • アンカーの周辺のみ認識していて、どの領域で位置推定できるのか不明 • アンカーの位置を修正するためには、削除して再度配置する必要がある
https://youtu.be/1R-VGfkI4vA
Immersal x 3D Scanner App • 専用アプリで撮影(3D Scanner Appを使えばスキャンを確認しながら画像取得) •
画像とカメラ情報をImmersalにアップロードし、マップ作成 • ダウンロードしたマップ上にコンテンツを配置 • APIで画像をPOSTすると自己位置推定できる https://twitter.com/sotongshi/status/1431203787796926467
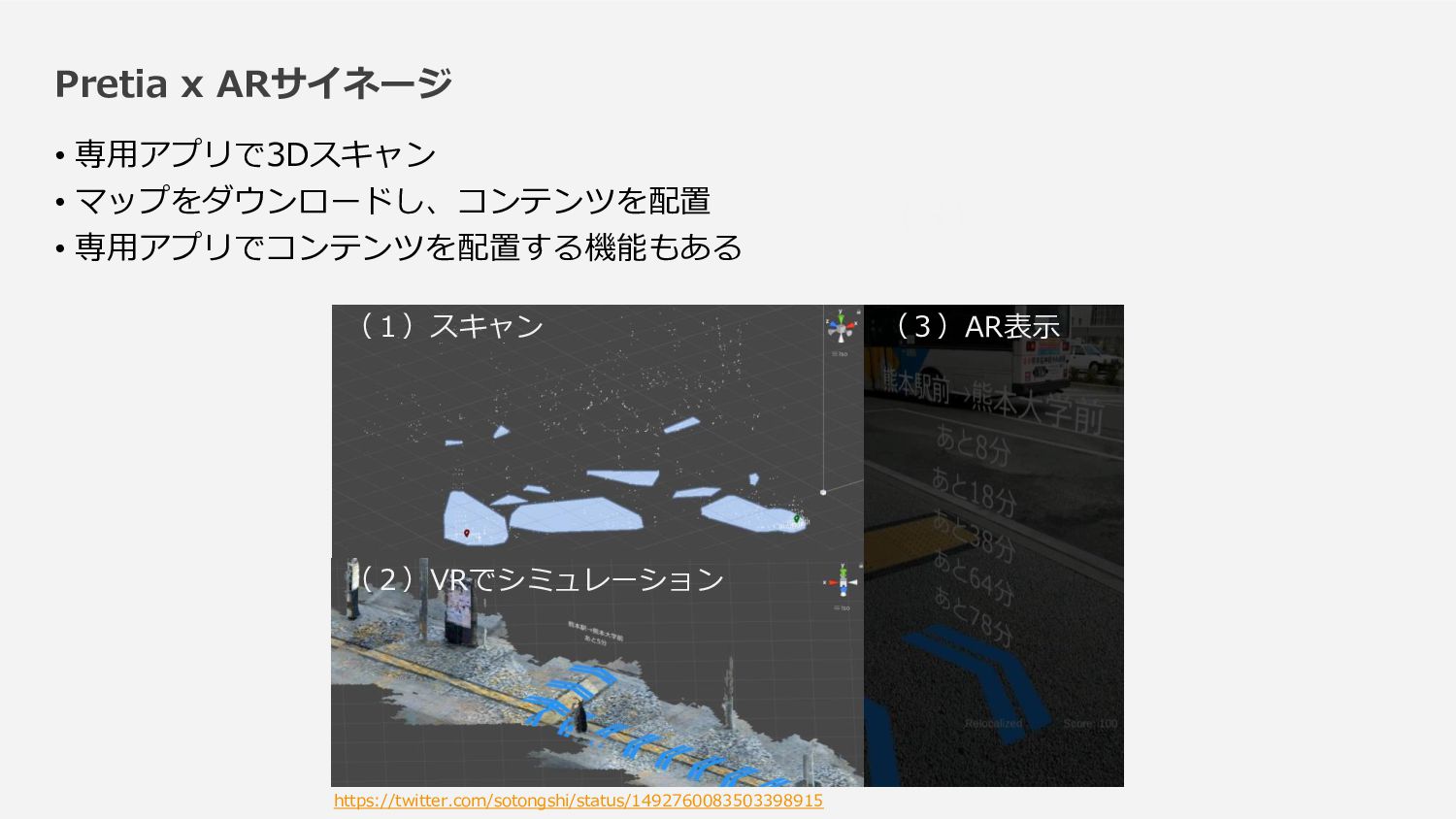
Pretia x ARサイネージ • 専用アプリで3Dスキャン • マップをダウンロードし、コンテンツを配置 • 専用アプリでコンテンツを配置する機能もある (3)
(1)スキャン (2)VRでシミュレーション (3)AR表示 https://twitter.com/sotongshi/status/1492760083503398915
Geospatial API x PLATEAU • Googleが事前にスキャンしている(地球規模対応w つよ • 経度緯度高度の指定だけでコンテンツが置ける •
精度はあまり良くない印象 https://twitter.com/sotongshi/status/1557003609019400194
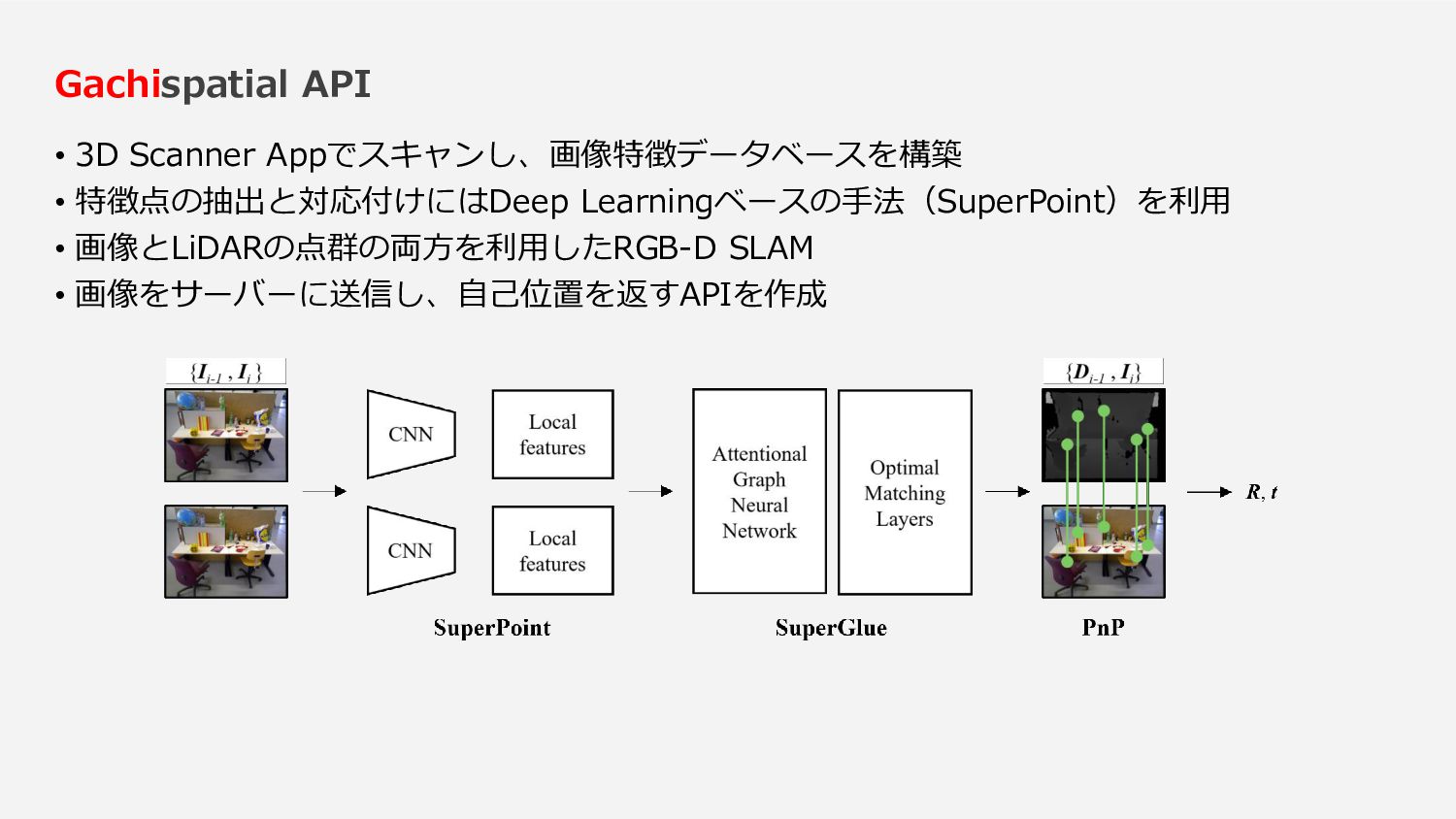
Gachispatial API • 3D Scanner Appでスキャンし、画像特徴データベースを構築 • 特徴点の抽出と対応付けにはDeep Learningベースの手法(SuperPoint)を利用 •
画像とLiDARの点群の両方を利用したRGB-D SLAM • 画像をサーバーに送信し、自己位置を返すAPIを作成
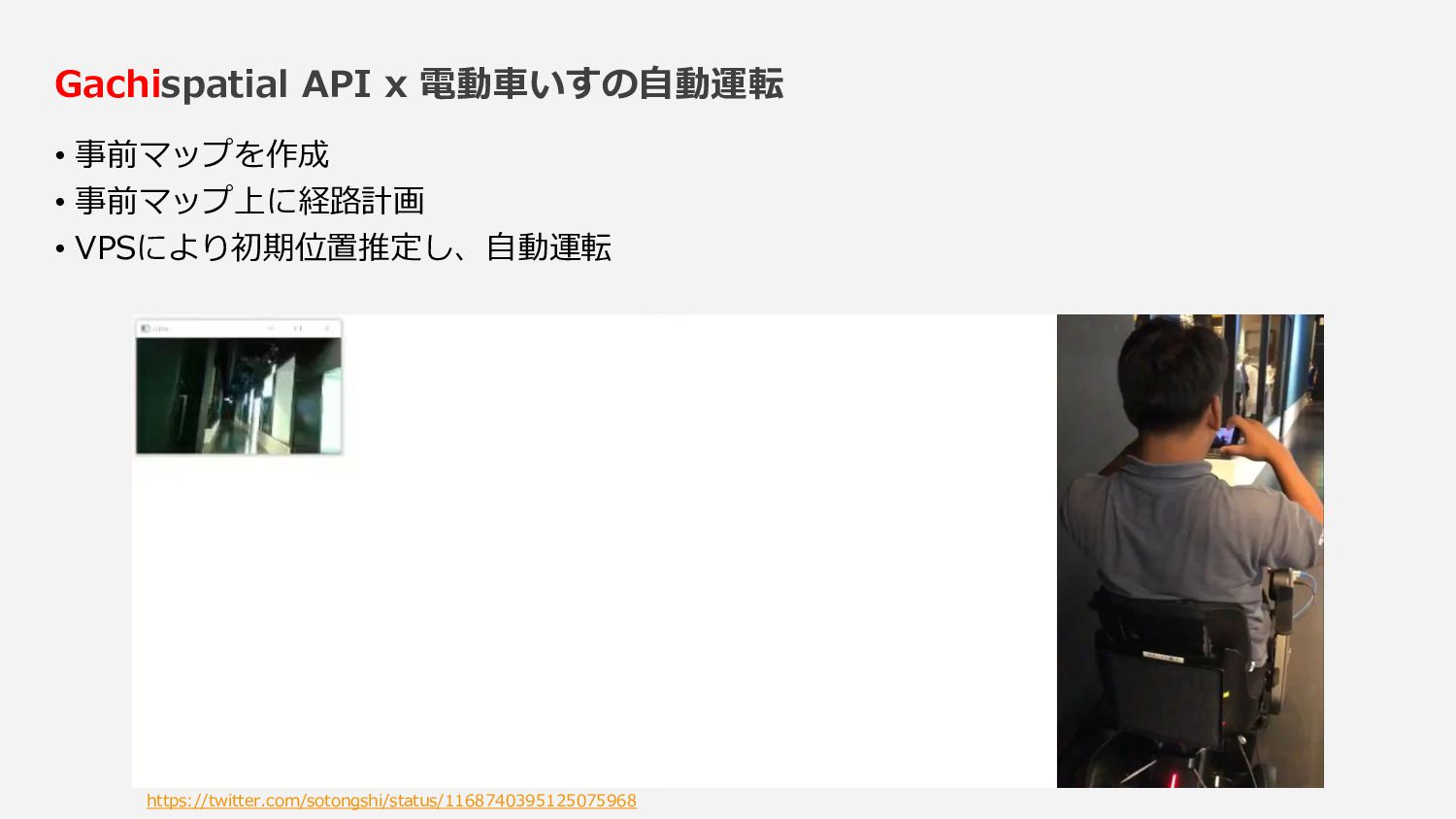
Gachispatial API x 電動車いすの自動運転 • 事前マップを作成 • 事前マップ上に経路計画 • VPSにより初期位置推定し、自動運転
https://twitter.com/sotongshi/status/1168740395125075968
まとめ • VPSは事前マップから自己位置推定 • VPSのライブラリを表にまとめた • VPS活用して、現実と仮想を融合しよう
告知 https://qiita.com/advent-calendar/2022/hololens 7年目です!
ノーコードでXR体験を作れる「ナレコムVR」 • 横河レンタリース様のHoloLens2レンタル事業にバンドル • 大学生協で販売
ご清聴ありがとうございました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}