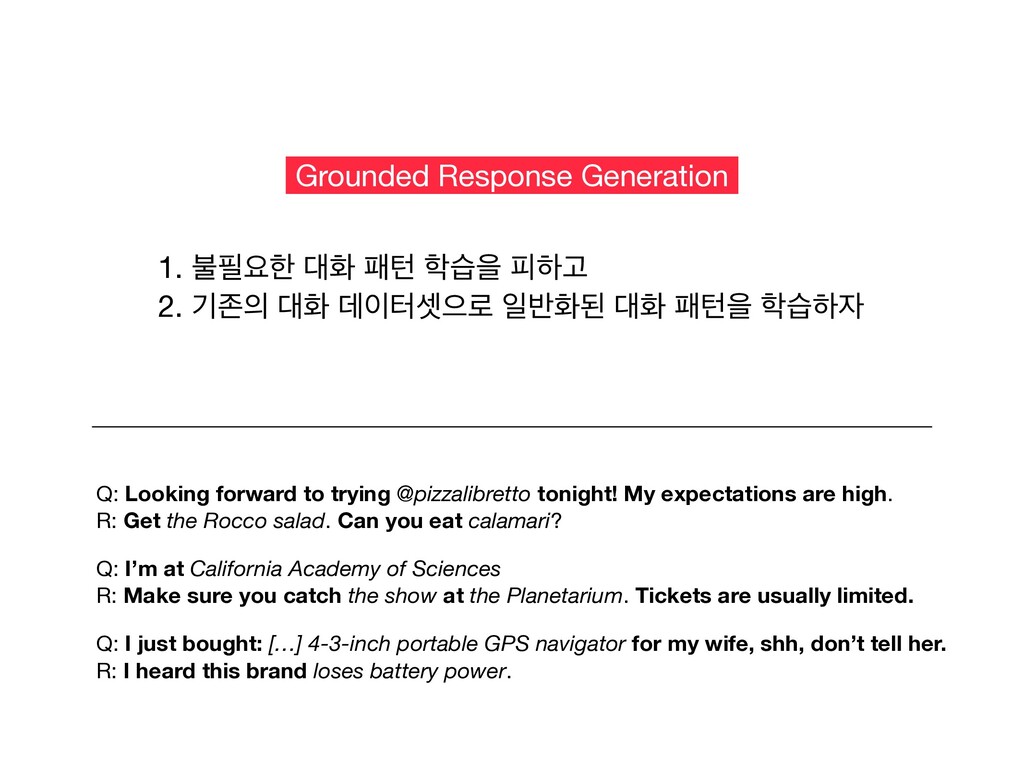
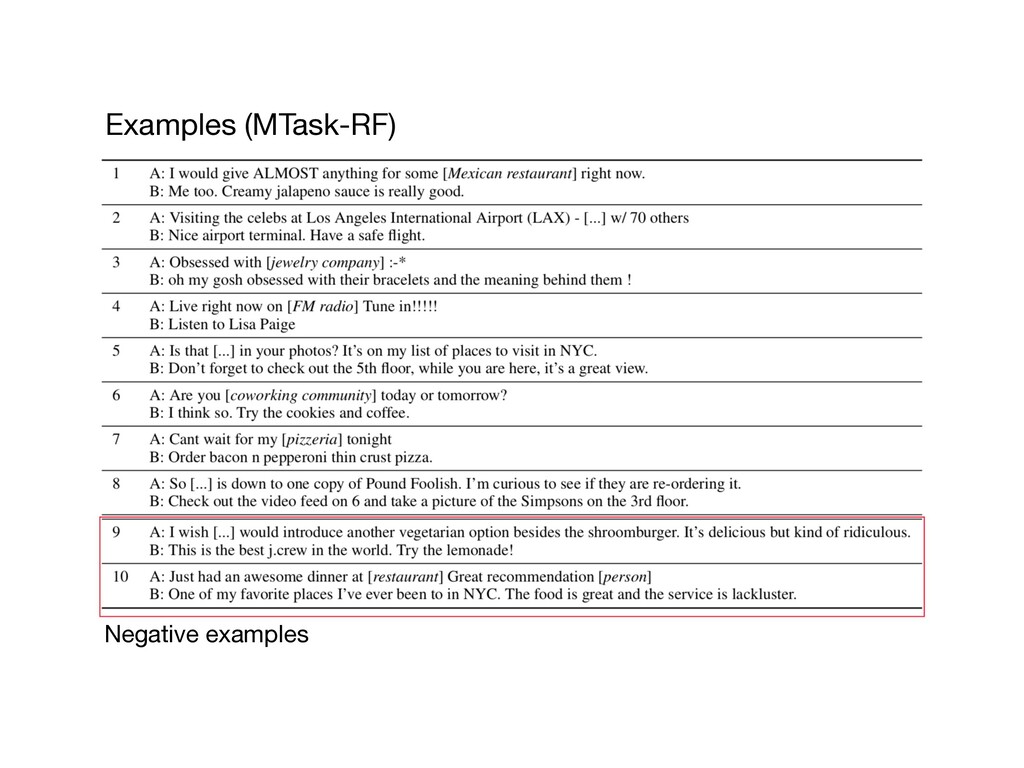
ӝઓ ച ؘఠࣇਵ۽ ੌ߈ചػ ച ಁఢਸ णೞ Q: Looking forward to trying @pizzalibretto tonight! My expectations are high. R: Get the Rocco salad. Can you eat calamari? Q: I’m at California Academy of Sciences R: Make sure you catch the show at the Planetarium. Tickets are usually limited. Q: I just bought: […] 4-3-inch portable GPS navigator for my wife, shh, don’t tell her. R: I heard this brand loses battery power.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}