2014 Acknowledgments • This work was performed in the context of – PhD thesis at Mitsubishi Electric R&D Center Europe and Telecom Bretagne – WHERE2 FP7 European project
2014 Wireless localization solutions • Wireless localization: Estimating the location of a device based on location dependent parameters of the transmitted signals in a wireless system • A fundamental localization solution: Global Navigation Satellite Systems (GNSS) (e.g., GPS, Galileo, GLONASS, COMPASS) • GNSS Augmentation (by satellites or by terrestrial systems) – Improved coverage and accuracy – Improved start-up and reduced time-to-first-fix • GNSS solutions are not available in all environments (e.g., urban canyons and indoor) • Ubiquitous localization solutions: Measurements in terrestrial wireless systems Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
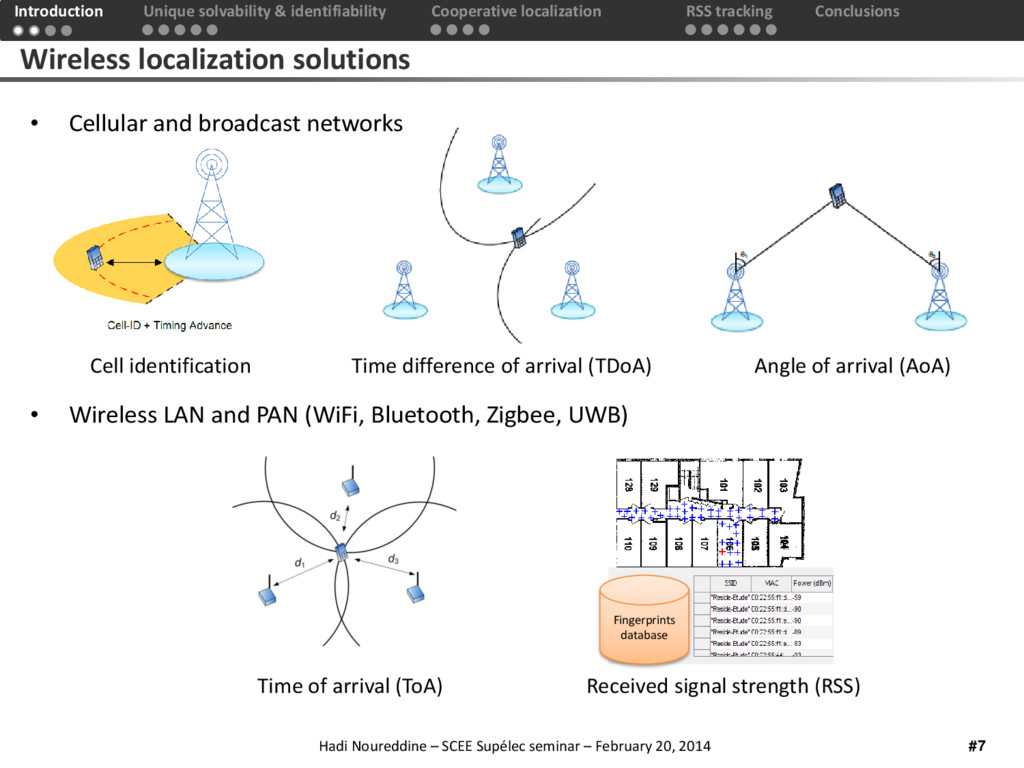
2014 Time difference of arrival (TDoA) • Cellular and broadcast networks • Wireless LAN and PAN (WiFi, Bluetooth, Zigbee, UWB) Cell identification Angle of arrival (AoA) Wireless localization solutions Fingerprints database Time of arrival (ToA) Received signal strength (RSS) Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
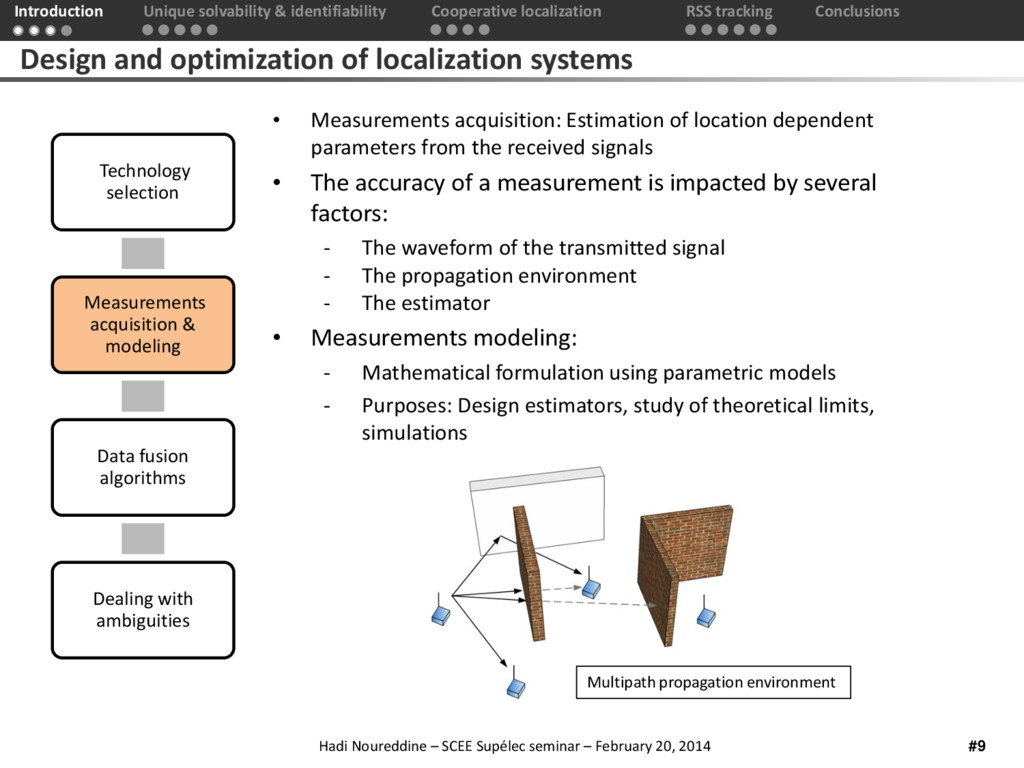
2014 Technology selection Measurements acquisition & modeling Data fusion algorithms Dealing with ambiguities • Measurements acquisition: Estimation of location dependent parameters from the received signals • The accuracy of a measurement is impacted by several factors: - The waveform of the transmitted signal - The propagation environment - The estimator • Measurements modeling: - Mathematical formulation using parametric models - Purposes: Design estimators, study of theoretical limits, simulations Design and optimization of localization systems Multipath propagation environment Unique solvability & identifiability Cooperative localization RSS tracking Conclusions Introduction
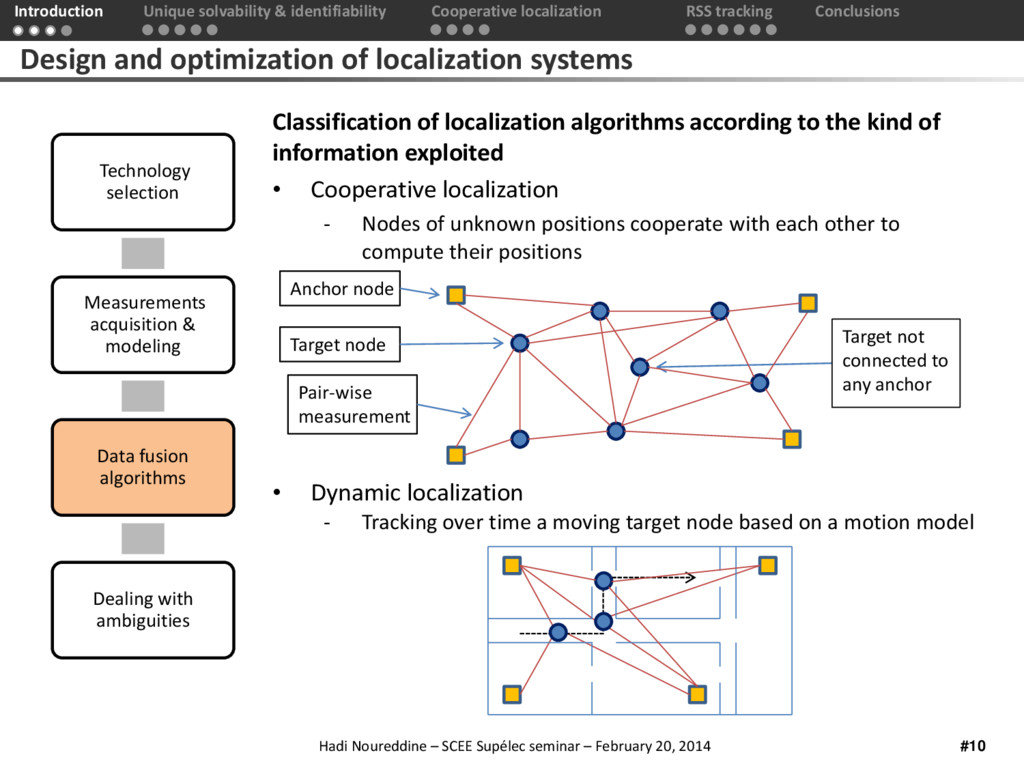
2014 Classification of localization algorithms according to the kind of information exploited • Cooperative localization - Nodes of unknown positions cooperate with each other to compute their positions • Dynamic localization - Tracking over time a moving target node based on a motion model Technology selection Measurements acquisition & modeling Data fusion algorithms Dealing with ambiguities Design and optimization of localization systems Target not connected to any anchor Anchor node Target node Pair-wise measurement Unique solvability & identifiability Cooperative localization RSS tracking Conclusions Introduction
2014 • Partially connected static cooperative network • In large networks of distant nodes, the ambiguities result in high location estimation errors • Needs for detecting the ambiguities - Deployment purposes (e.g., number and positions of anchors, connectivity ranges) - Mitigation purposes (e.g., making additional measurements) Technology selection Measurements acquisition & modeling Data fusion algorithms Dealing with ambiguities Design and optimization of localization systems Ranging measurement Unique solvability & identifiability Cooperative localization RSS tracking Conclusions Introduction
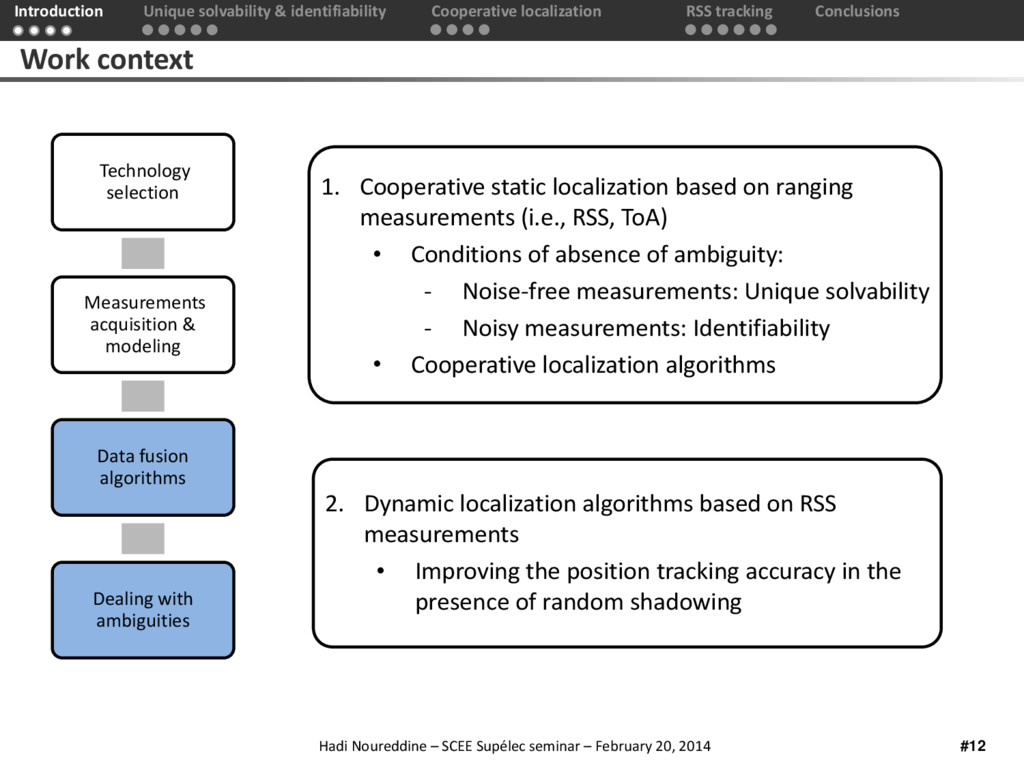
2014 Work context 2. Dynamic localization algorithms based on RSS measurements • Improving the position tracking accuracy in the presence of random shadowing 1. Cooperative static localization based on ranging measurements (i.e., RSS, ToA) • Conditions of absence of ambiguity: - Noise-free measurements: Unique solvability - Noisy measurements: Identifiability • Cooperative localization algorithms Technology selection Measurements acquisition & modeling Data fusion algorithms Dealing with ambiguities Unique solvability & identifiability Cooperative localization RSS tracking Conclusions Introduction
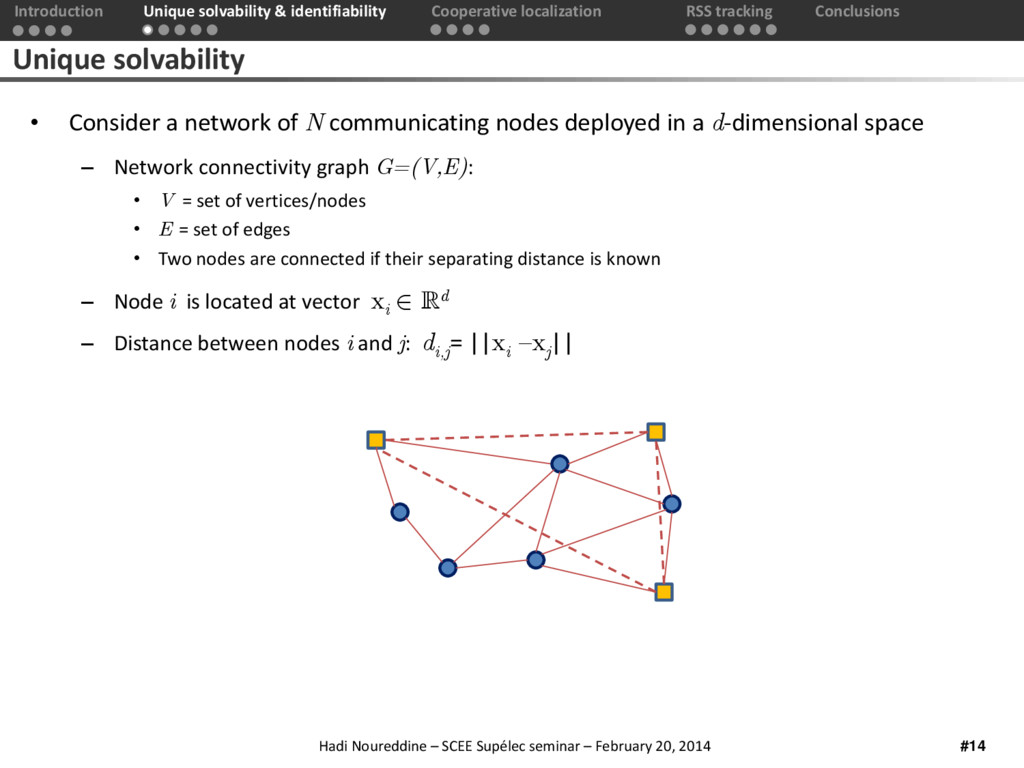
2014 Unique solvability • Consider a network of N communicating nodes deployed in a d-dimensional space – Network connectivity graph G=(V,E): • V = set of vertices/nodes • E = set of edges • Two nodes are connected if their separating distance is known – Node i is located at vector x i d – Distance between nodes i and j: di,j = ||x i –x j || Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
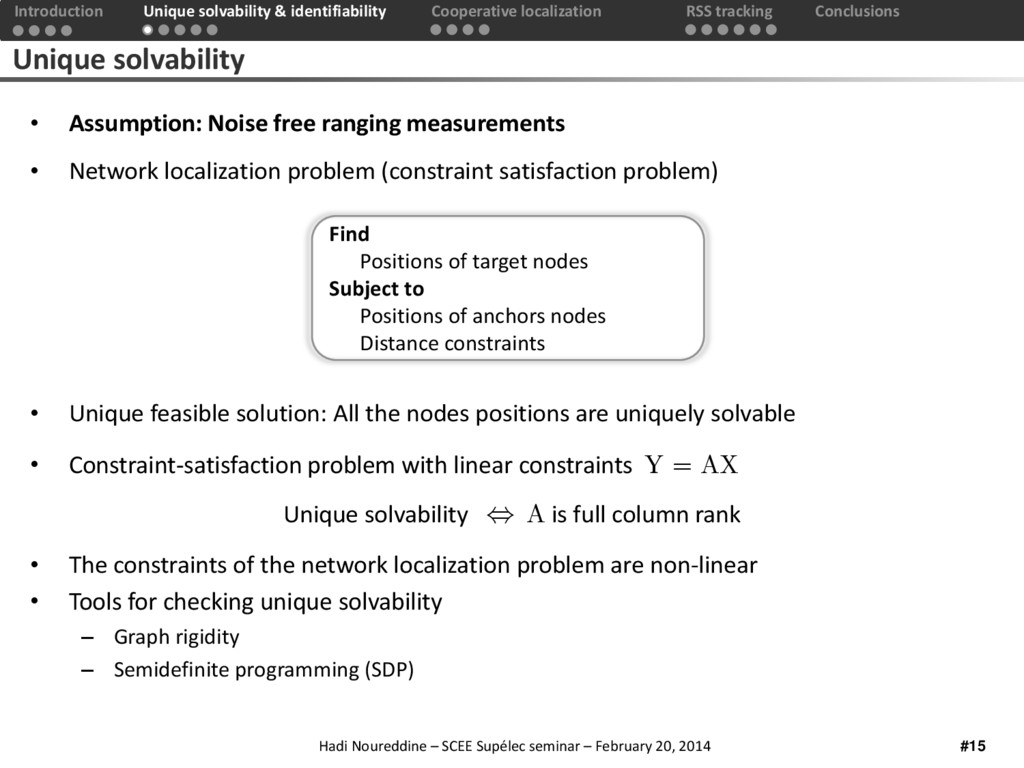
2014 Unique solvability • Assumption: Noise free ranging measurements • Network localization problem (constraint satisfaction problem) • Unique feasible solution: All the nodes positions are uniquely solvable • Constraint-satisfaction problem with linear constraints Y = AX Unique solvability A is full column rank • The constraints of the network localization problem are non-linear • Tools for checking unique solvability – Graph rigidity – Semidefinite programming (SDP) Find Positions of target nodes Subject to Positions of anchors nodes Distance constraints Introduction Cooperative localization RSS tracking Conclusions Unique solvability & identifiability
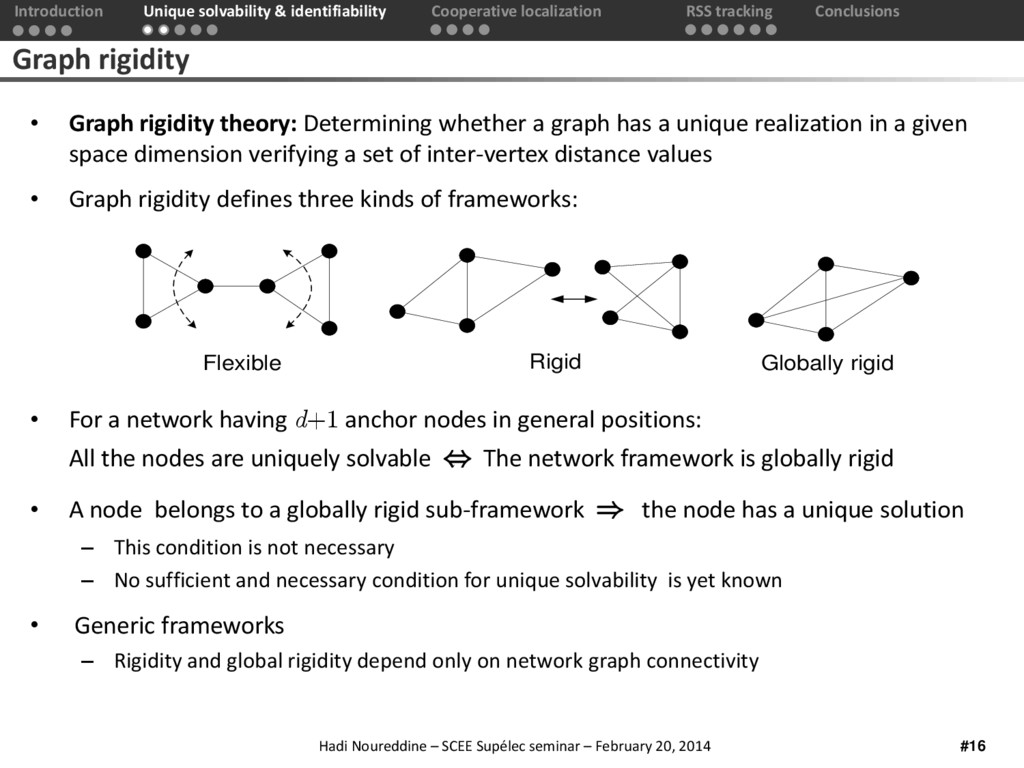
2014 Graph rigidity • Graph rigidity theory: Determining whether a graph has a unique realization in a given space dimension verifying a set of inter-vertex distance values • Graph rigidity defines three kinds of frameworks: • For a network having d+1 anchor nodes in general positions: All the nodes are uniquely solvable The network framework is globally rigid • A node belongs to a globally rigid sub-framework the node has a unique solution – This condition is not necessary – No sufficient and necessary condition for unique solvability is yet known • Generic frameworks – Rigidity and global rigidity depend only on network graph connectivity Flexible Rigid Globally rigid Introduction Cooperative localization RSS tracking Conclusions Unique solvability & identifiability
2014 Identifiability in cooperative localization • Ranging measurement between two nodes u and v is random due to noise: • Unknown vector of targets positions: • Observation vector: • Likelihood function: • Identifiability theory: Possibility of drawing inference from parametric models • Two parameters are observationally equivalent if • A parameter is globally identifiable if there is no other observationally equivalent to it. y : vector of all ranging measurements {yu,v } Introduction Cooperative localization RSS tracking Conclusions Unique solvability & identifiability
2014 Identifiability and rigidity Derivation of several correspondences between rigidity and identifiability: • verifies some properties • Theorem For a d-dimensional network having at least d+1 anchor nodes in general positions Global rigidity Global identifiability • For generic networks, identifiability is a graph connectivity property independent of measurements and positions values Asymptotic estimation properties: • Consistency as the number of measurements trials • Asymptotic normality • Derivation of sufficient conditions for consistency and asymptotic normality • Global identifiability is among these sufficient conditions Introduction Cooperative localization RSS tracking Conclusions Unique solvability & identifiability
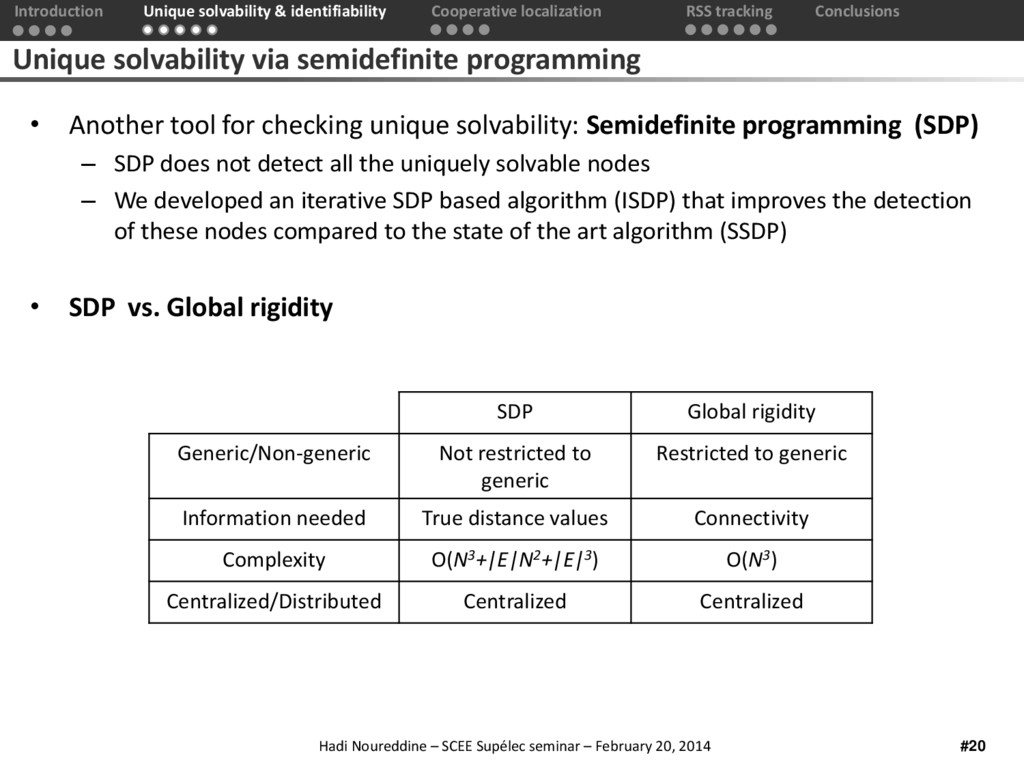
2014 Unique solvability via semidefinite programming • Another tool for checking unique solvability: Semidefinite programming (SDP) – SDP does not detect all the uniquely solvable nodes – We developed an iterative SDP based algorithm (ISDP) that improves the detection of these nodes compared to the state of the art algorithm (SSDP) • SDP vs. Global rigidity SDP Global rigidity Generic/Non-generic Not restricted to generic Restricted to generic Information needed True distance values Connectivity Complexity O(N3+|E|N2+|E|3) O(N3) Centralized/Distributed Centralized Centralized Introduction Cooperative localization RSS tracking Conclusions Unique solvability & identifiability
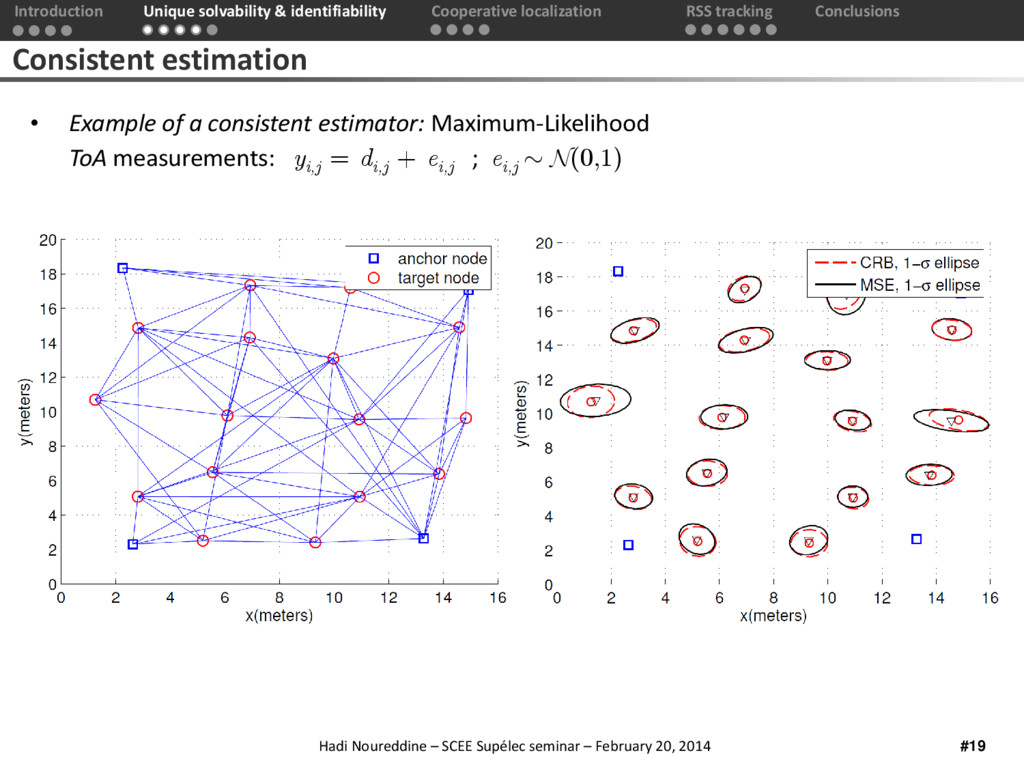
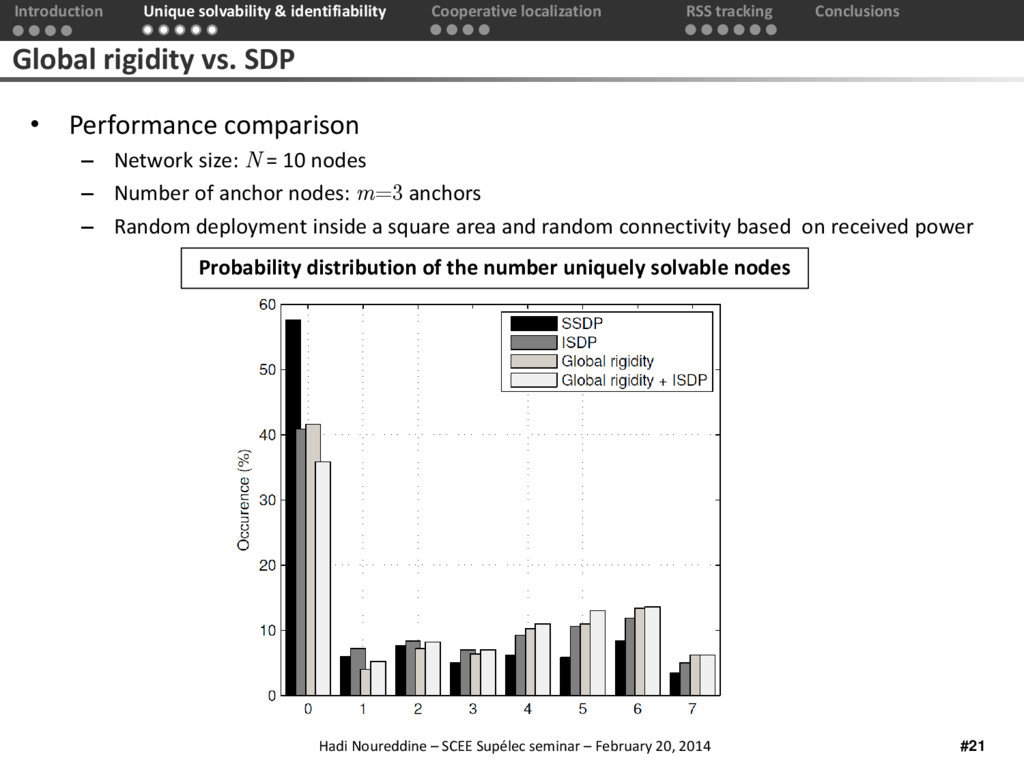
2014 Global rigidity vs. SDP • Performance comparison – Network size: N = 10 nodes – Number of anchor nodes: m=3 anchors – Random deployment inside a square area and random connectivity based on received power Probability distribution of the number uniquely solvable nodes Introduction Cooperative localization RSS tracking Conclusions Unique solvability & identifiability
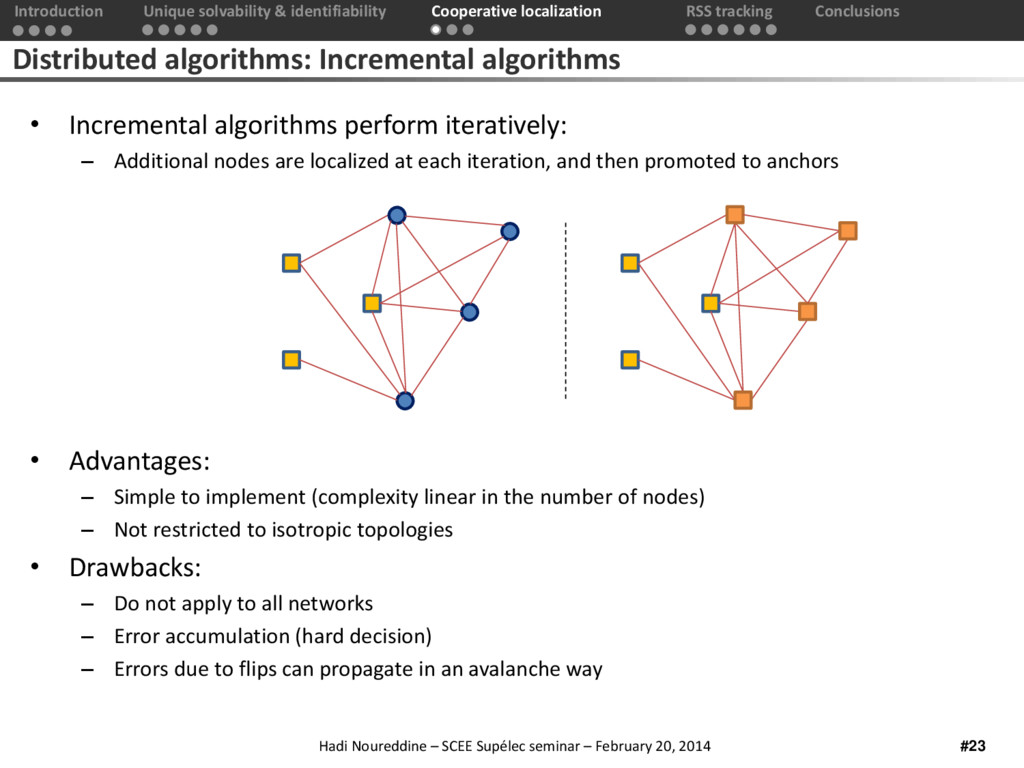
2014 Distributed algorithms: Incremental algorithms • Incremental algorithms perform iteratively: – Additional nodes are localized at each iteration, and then promoted to anchors • Advantages: – Simple to implement (complexity linear in the number of nodes) – Not restricted to isotropic topologies • Drawbacks: – Do not apply to all networks – Error accumulation (hard decision) – Errors due to flips can propagate in an avalanche way Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
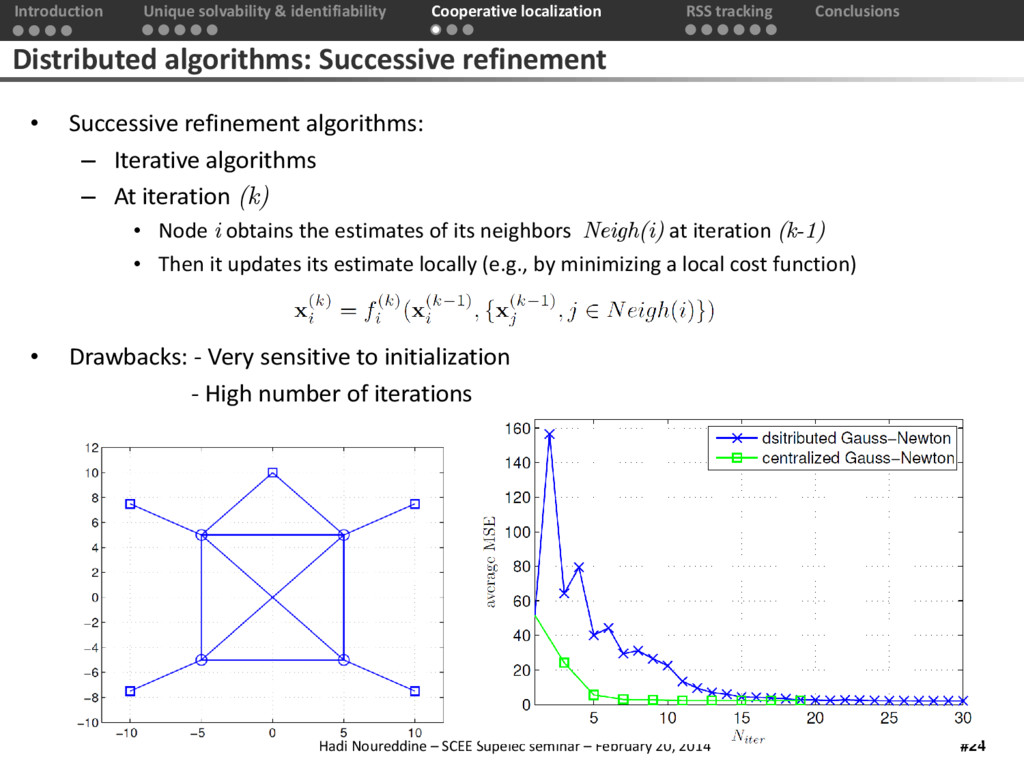
2014 Distributed algorithms: Successive refinement • Successive refinement algorithms: – Iterative algorithms – At iteration (k) • Node i obtains the estimates of its neighbors Neigh(i) at iteration (k-1) • Then it updates its estimate locally (e.g., by minimizing a local cost function) • Drawbacks: - Very sensitive to initialization - High number of iterations Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
2014 Distributed algorithms: Message passing • Probabilistic estimation: Exploiting the probabilistic models for the measurements and the a priori information • Joint posterior distribution: • Message passing algorithms: Distributed computation of the marginal distribution functions by exchanging messages between the nodes, iteratively – Positions can be estimated locally – Representation of uncertainties • A suitable message passing algorithm for the localization problem: Belief propagation (BP) • Numerical implementation using nonparametric belief propagation (NBP) • A new variant of NBP: Two-phased NBP (TP-NBP) – Extension of the classical NBP with a phase of inference in discrete state space – Reduction of the size of exchanged messages – Improved positioning accuracy – Small increase of the number of iterations Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
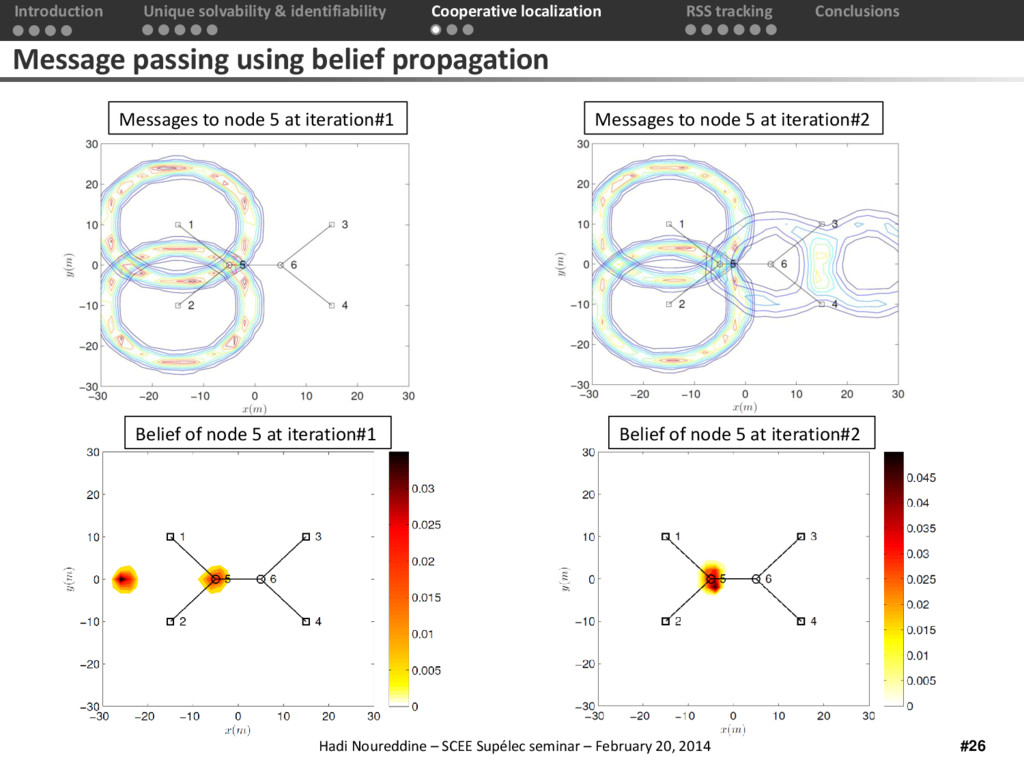
2014 Message passing using belief propagation Messages to node 5 at iteration#1 Messages to node 5 at iteration#2 Belief of node 5 at iteration#1 Belief of node 5 at iteration#2 Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
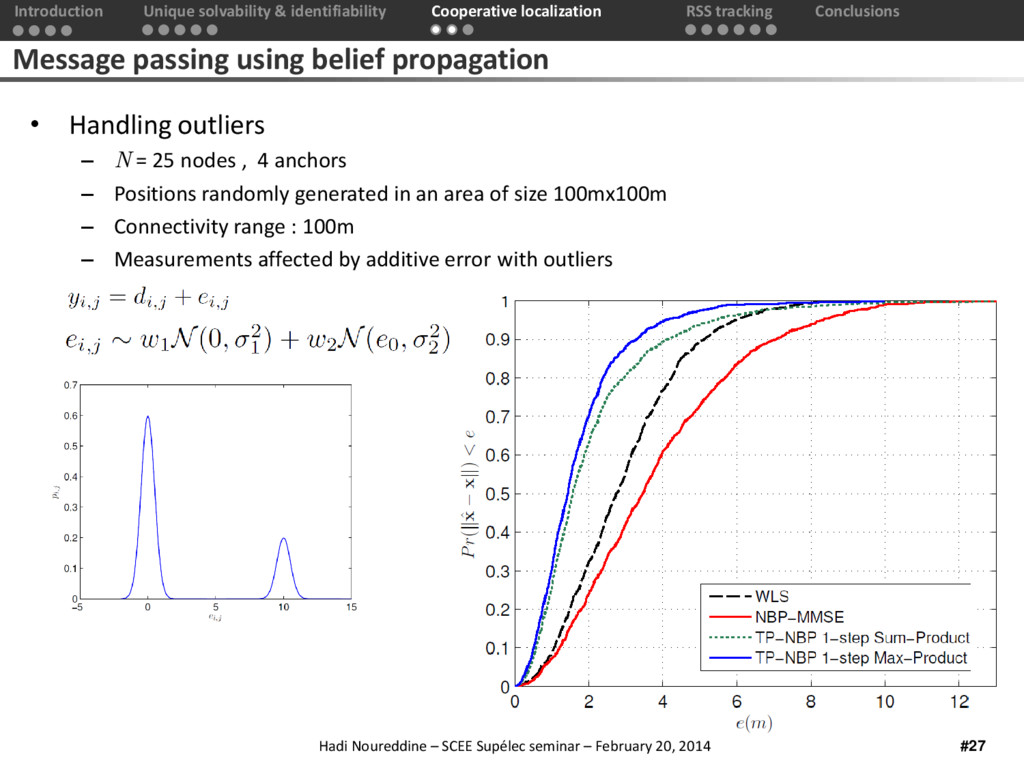
2014 Message passing using belief propagation • Handling outliers – N = 25 nodes , 4 anchors – Positions randomly generated in an area of size 100mx100m – Connectivity range : 100m – Measurements affected by additive error with outliers Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
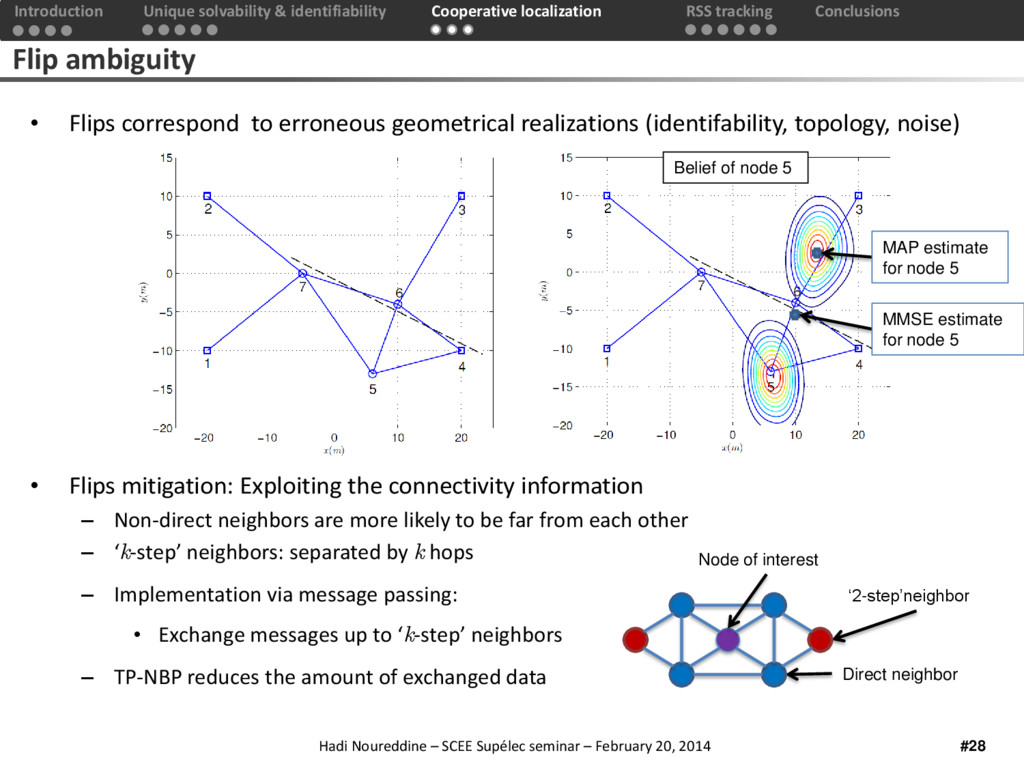
2014 Flip ambiguity • Flips correspond to erroneous geometrical realizations (identifability, topology, noise) • Flips mitigation: Exploiting the connectivity information – Non-direct neighbors are more likely to be far from each other – ‘k-step’ neighbors: separated by k hops – Implementation via message passing: • Exchange messages up to ‘k-step’ neighbors – TP-NBP reduces the amount of exchanged data Direct neighbor ‘2-step’neighbor Node of interest MAP estimate for node 5 MMSE estimate for node 5 Belief of node 5 Introduction Unique solvability & identifiability RSS tracking Conclusions Cooperative localization
2014 Position tracking based on RSS • Tracking consists in estimating the position over time of a moving terminal: – Accuracy improvement over static localization: • The history of observations is exploited • Motion subject to constraints (kinematic laws and space layout) – Possibility of integrating inertial navigation sensors (INS) (e.g. accelerometers) • We consider the use of RSS – Measurements available by default – Problem: Presence of random shadowing due to propagation environment • A classical solution for mitigating the shadowing: Fingerprinting – Drawback: Substantial time and effort are required to construct the database and to maintain it up-to-date • Two Bayesian tracking solutions were developed 1. Joint position and shadowing tracking by exploiting the shadowing spatial correlation 2. Shadowing maps estimation during the on-line tracking phase Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
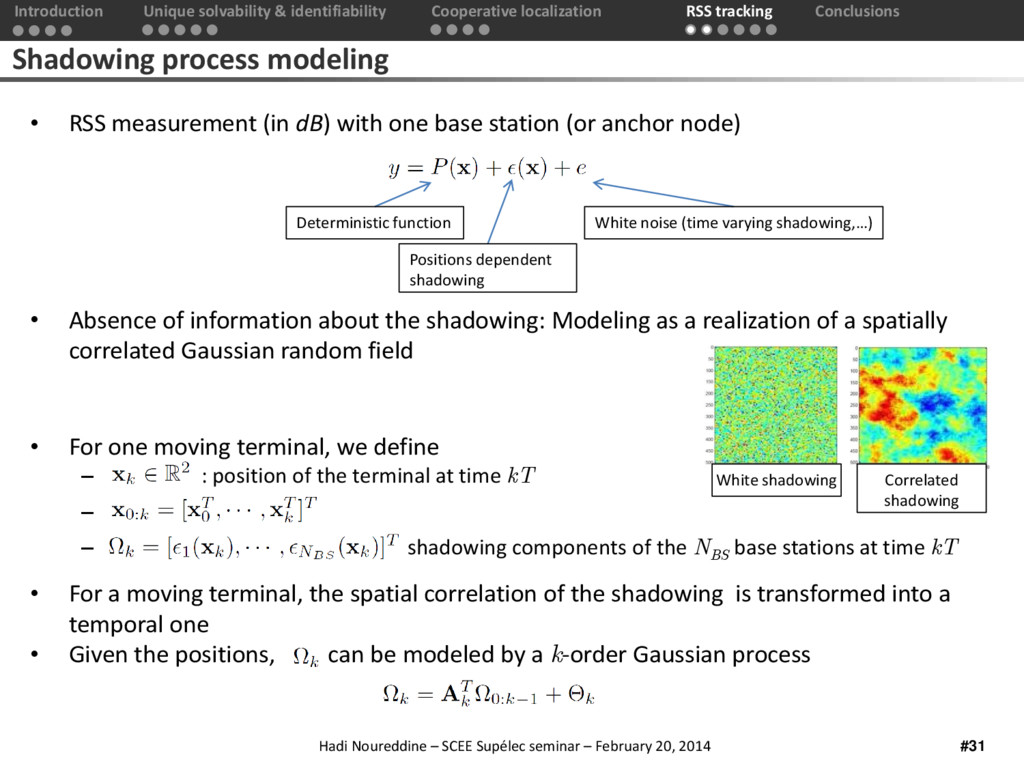
2014 Shadowing process modeling • RSS measurement (in dB) with one base station (or anchor node) • Absence of information about the shadowing: Modeling as a realization of a spatially correlated Gaussian random field • For one moving terminal, we define – : position of the terminal at time kT – – shadowing components of the NBS base stations at time kT • For a moving terminal, the spatial correlation of the shadowing is transformed into a temporal one • Given the positions, can be modeled by a k-order Gaussian process Deterministic function Positions dependent shadowing White noise (time varying shadowing,…) White shadowing Correlated shadowing Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
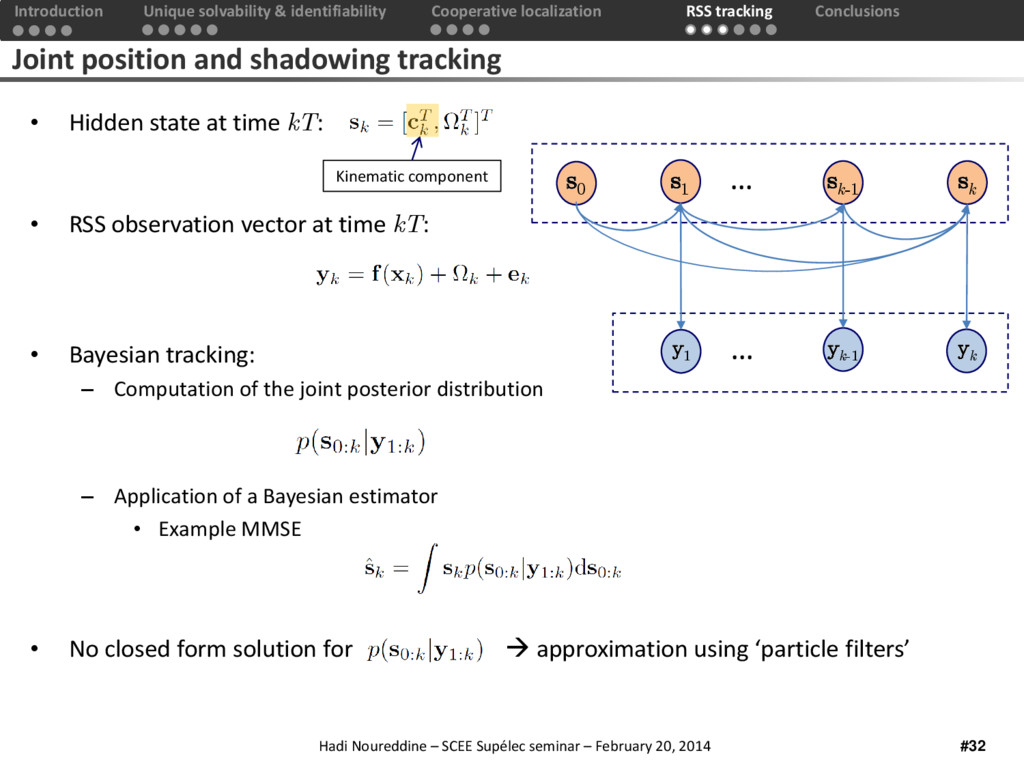
2014 Joint position and shadowing tracking • Hidden state at time kT: • RSS observation vector at time kT: • Bayesian tracking: – Computation of the joint posterior distribution – Application of a Bayesian estimator • Example MMSE • No closed form solution for approximation using ‘particle filters’ Kinematic component … s1 sk-1 y1 … sk yk-1 yk s0 Introduction Unique solvability & identifiability Cooperative localization Conclusions RSS tracking
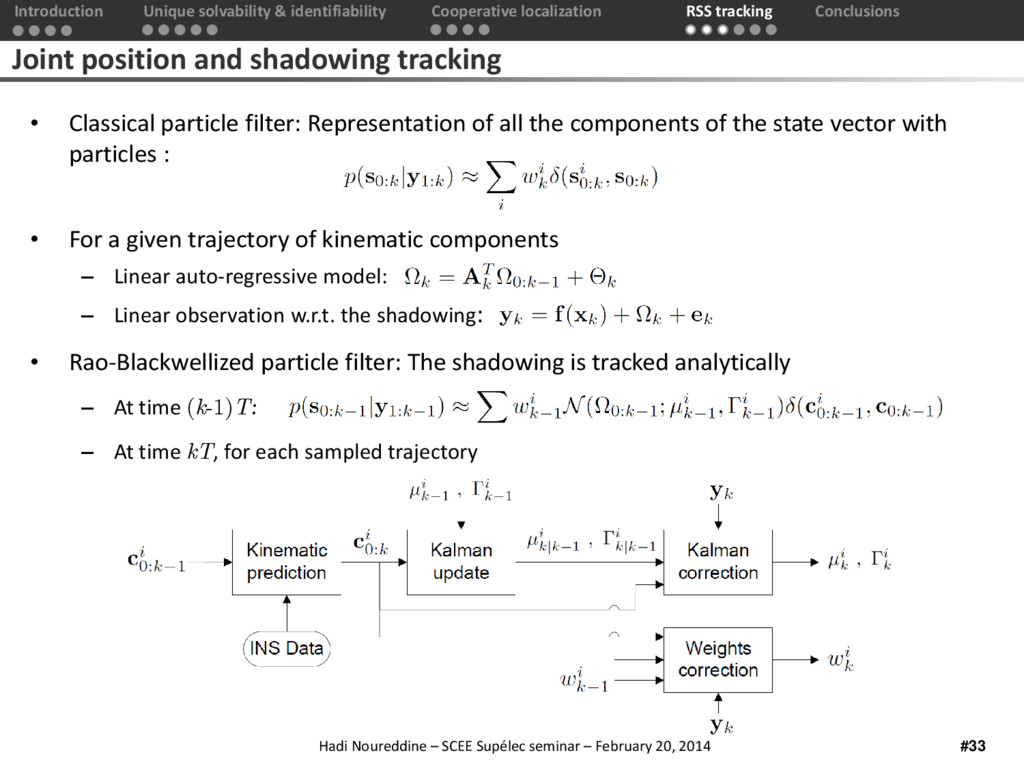
2014 Joint position and shadowing tracking • Classical particle filter: Representation of all the components of the state vector with particles : • For a given trajectory of kinematic components – Linear auto-regressive model: – Linear observation w.r.t. the shadowing: • Rao-Blackwellized particle filter: The shadowing is tracked analytically – At time (k-1)T: – At time kT, for each sampled trajectory Introduction Unique solvability & identifiability Cooperative localization Conclusions RSS tracking
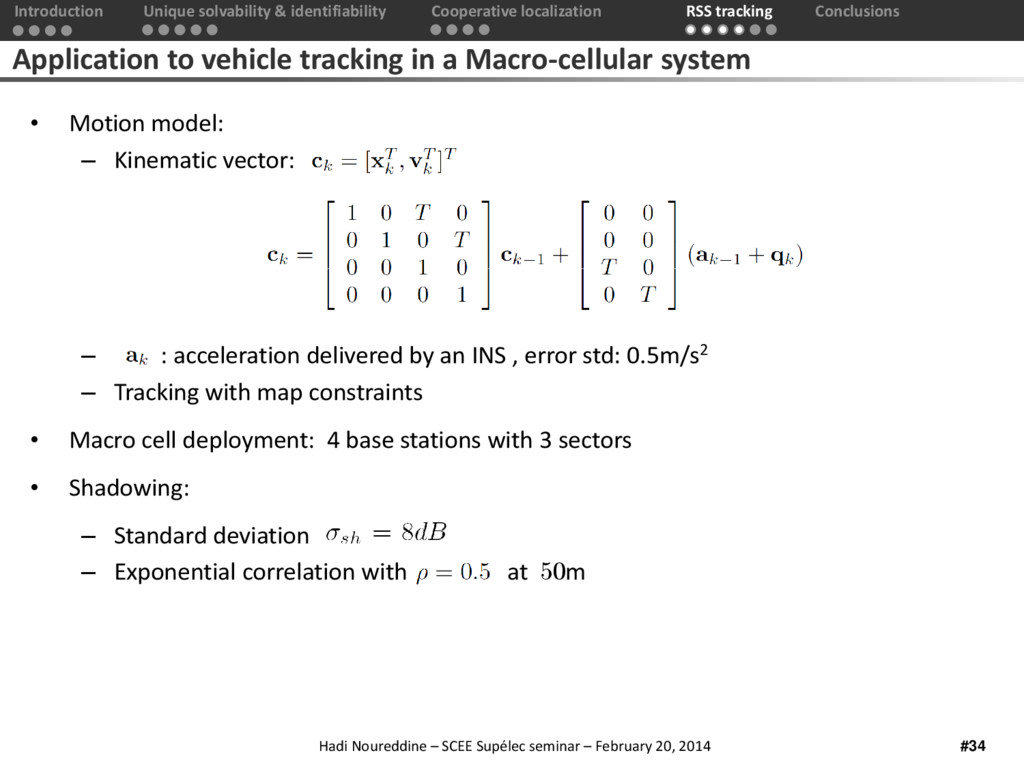
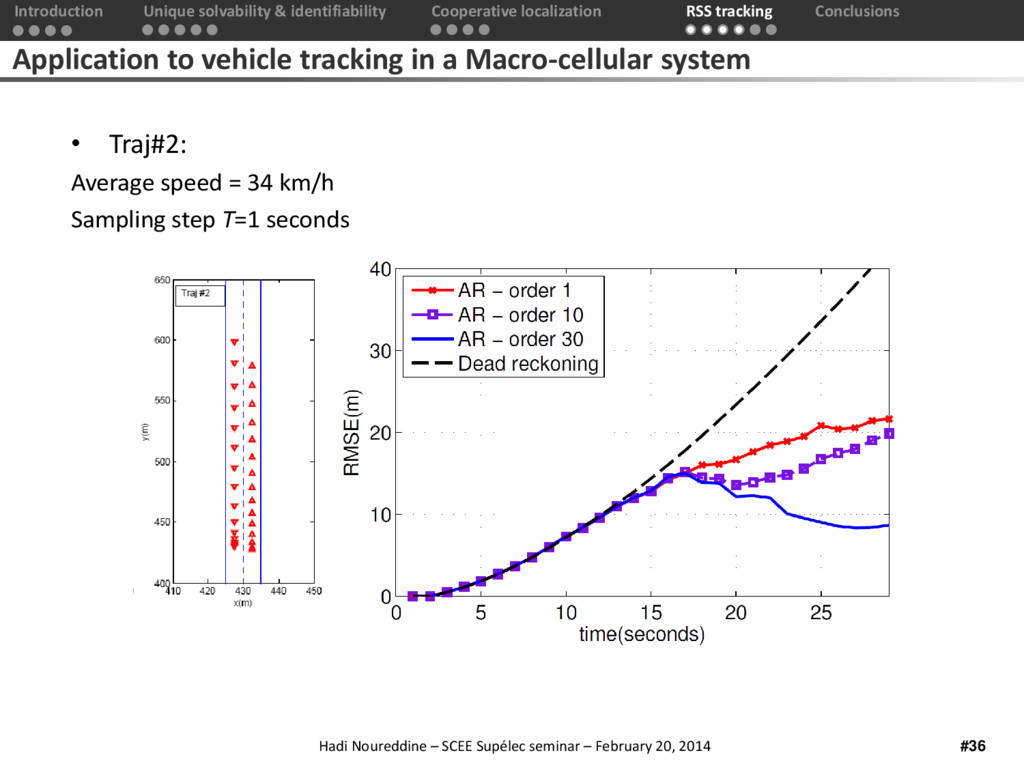
2014 Application to vehicle tracking in a Macro-cellular system • Motion model: – Kinematic vector: – : acceleration delivered by an INS , error std: 0.5m/s2 – Tracking with map constraints • Macro cell deployment: 4 base stations with 3 sectors • Shadowing: – Standard deviation – Exponential correlation with at 50m Introduction Unique solvability & identifiability Cooperative localization Conclusions RSS tracking
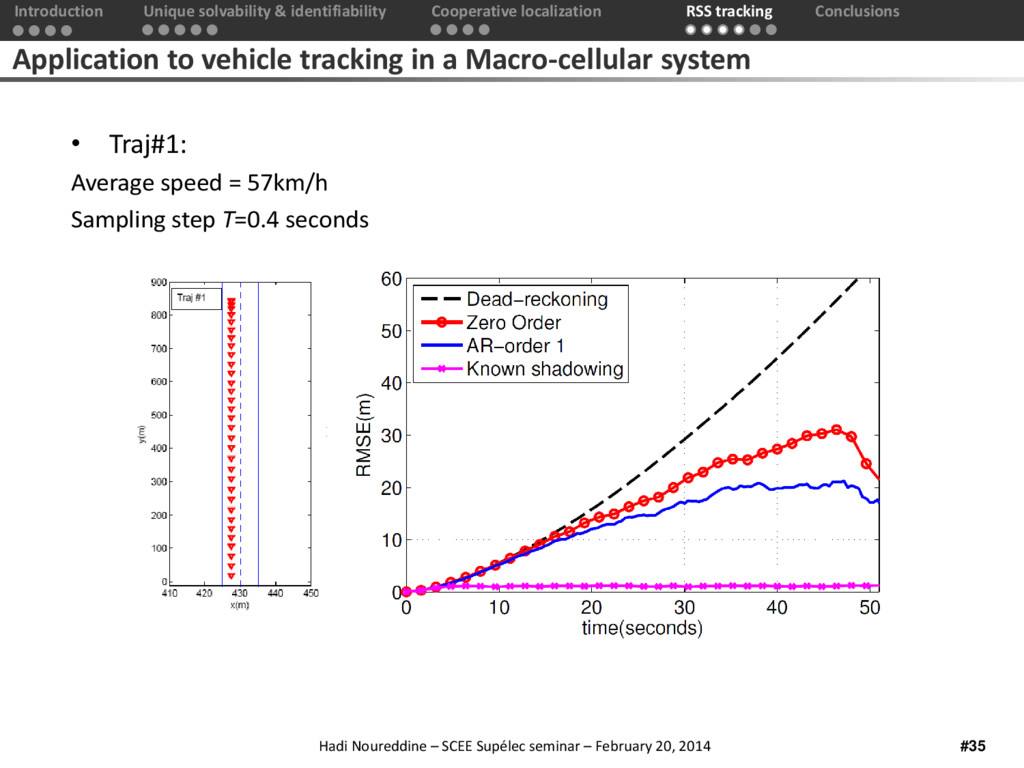
2014 Application to vehicle tracking in a Macro-cellular system • Traj#2: Average speed = 34 km/h Sampling step T=1 seconds Introduction Unique solvability & identifiability Cooperative localization Conclusions RSS tracking
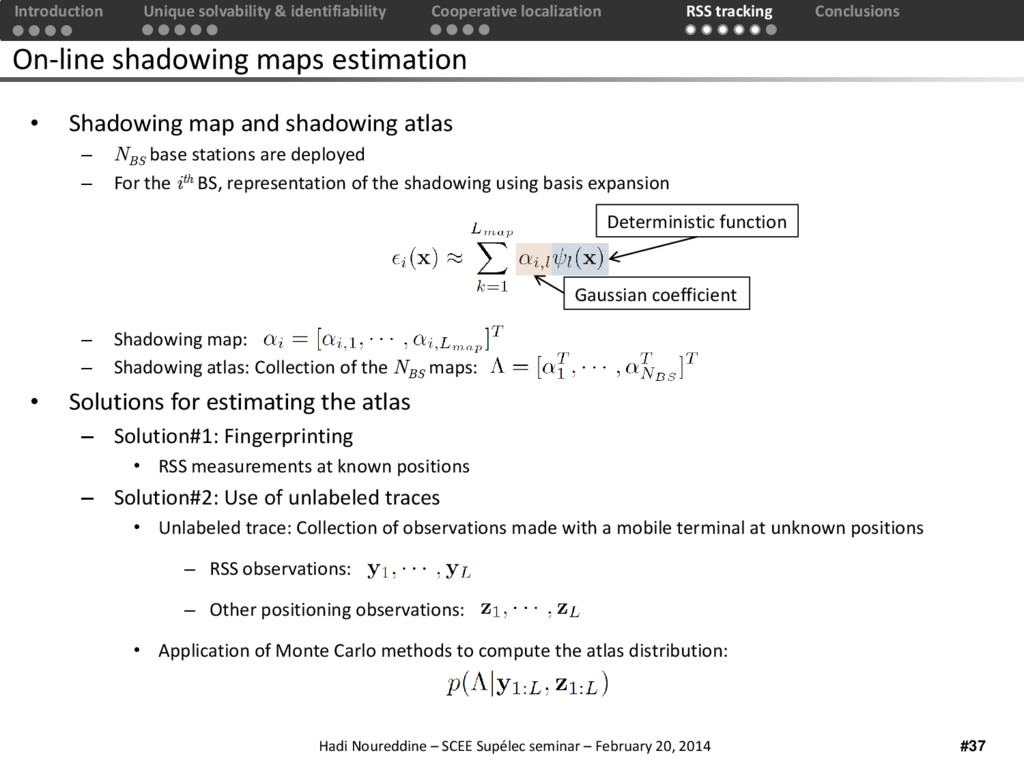
2014 On-line shadowing maps estimation • Shadowing map and shadowing atlas – NBS base stations are deployed – For the ith BS, representation of the shadowing using basis expansion – Shadowing map: – Shadowing atlas: Collection of the NBS maps: • Solutions for estimating the atlas – Solution#1: Fingerprinting • RSS measurements at known positions – Solution#2: Use of unlabeled traces • Unlabeled trace: Collection of observations made with a mobile terminal at unknown positions – RSS observations: – Other positioning observations: • Application of Monte Carlo methods to compute the atlas distribution: Gaussian coefficient Deterministic function Introduction Unique solvability & identifiability Cooperative localization Conclusions RSS tracking
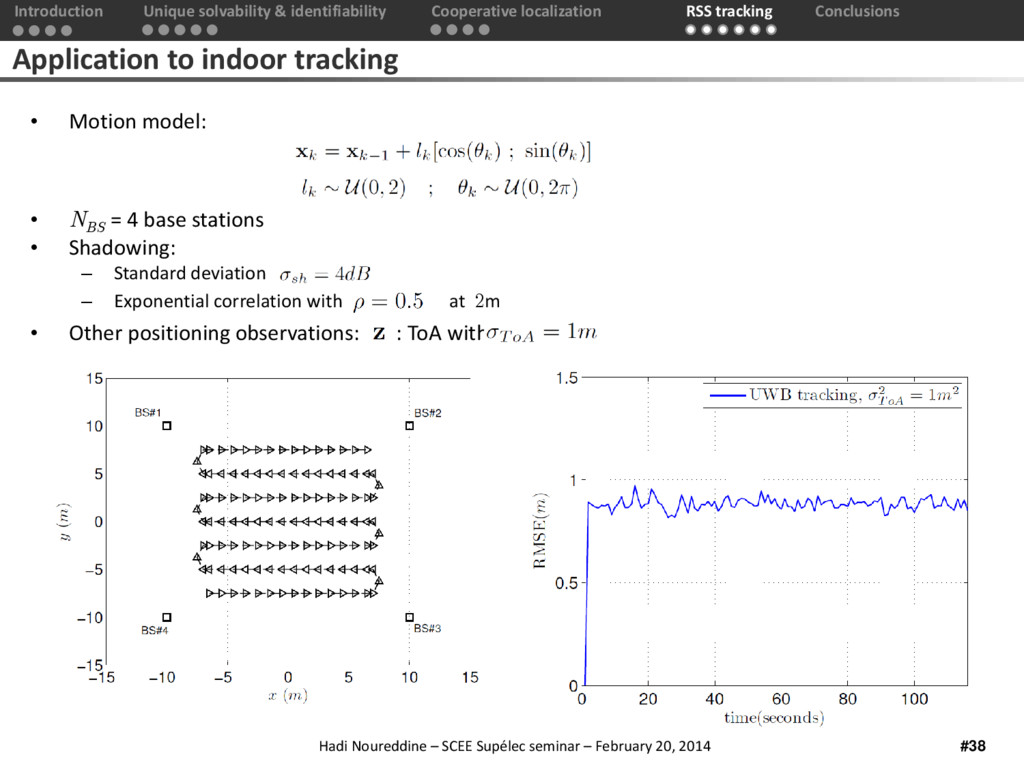
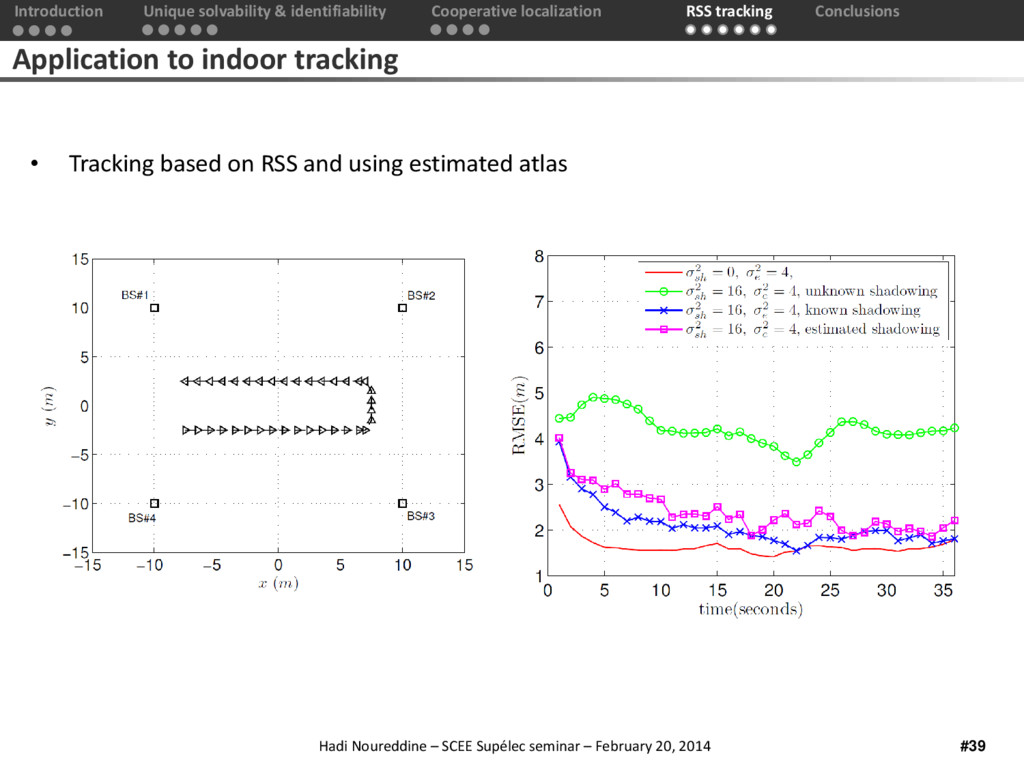
2014 Application to indoor tracking • Tracking based on RSS and using estimated atlas Introduction Unique solvability & identifiability Cooperative localization Conclusions RSS tracking
2014 Conclusions • Cooperative static localization – Unique solvability and Identifiability • Development of a solution that improves the detection of uniquely solvable nodes • Derivation of correspondences between the rigidity and the identifiability – Cooperative static localization • Development of solution based on NBP that improves the positioning accuracy and exploits the connectivity information • Tracking based on RSS – Development of solutions for improving the accuracy in the presence of random shadowing • Wireless localization has been an active research topic during the last decade • Some research topics – Propagation and mobility models – NLoS identification and mitigation – Hybrid positioning and data fusion algorithms – Seamless indoor/outdoor localization – Communication-oriented means supporting localization Introduction Unique solvability & identifiability Cooperative localization RSS tracking Conclusions
2014 WHERE 2 project • Wireless Hybrid Enhanced Mobile Radio Estimators - Phase 2 • European FP7 porject • Duration: 36 Months (June 2010-June 2013) • 15 partners (universities, R&D centers, SMEs, industrials) • Objectives of WHERE2: – Enhancing Positioning features by communication networks and non- radio sensors – Improving Communications by geo-location information – Developing integrated hardware platform to confirm performance and feasibility of cooperative positioning and communications algorithms • Four research workpackages • Deliverables available online: www.kn-s.dlr.de/where2/
2014 WHERE 2 project WP1 Scenarios, relevant models and market feedback Task 1.1 Scenarios and Parameters Task 1.2 Wireless channel characterization Task 1.3 Report on market and standardization WP2 Heterogeneous Context-aware Cooperative Positioning Task 2.1 Synergetic Cooperative Location and Communications for Dynamic Heterogeneous Networks - Dynamic and cooperative localization -Links selection and communication-oriented means supporting the localization Task 2.2 location information extraction - Inertial sensors - Geometry of the environment and map constrains - Fingerprinting database generation using Ray Tracing Task 2.3 Self-learning positioning using inferred context information - Retrieving the shape and the physical properties of indoor environments - Anchor-less localization - Mobility learning for enhancing the tracking functionality
2014 WHERE 2 project WP3 Geo-location aided cooperation for future wireless networks Task 3.1: Coordination and Cooperation between Network Nodes - Coordination and cooperation between of cell sites - Reducing signaling overhead Task 3.2 Realization and usage of geo-location based clustering and mobile relaying - Cluster head selection for mobile nodes, - Secure and trustworthy management and location discovery protocols - Handover optimization, two-hop relay selection Task 3.3 Location-aided PHY/MAC Layer Design for Advanced Cognitive Radios - Spectrum sensing, multi-antenna cognitive radios - Spectrum sharing and cognitive medium access techniques WP4 Heterogeneous test bed for location and communications - Measurement campaigns with several technologies: Wifi, UWB, ZigBee, LTE and OFDM - Database of the measurements is available - Application of different localization algorithms to the real data - Vertical Handover demonstrator
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}