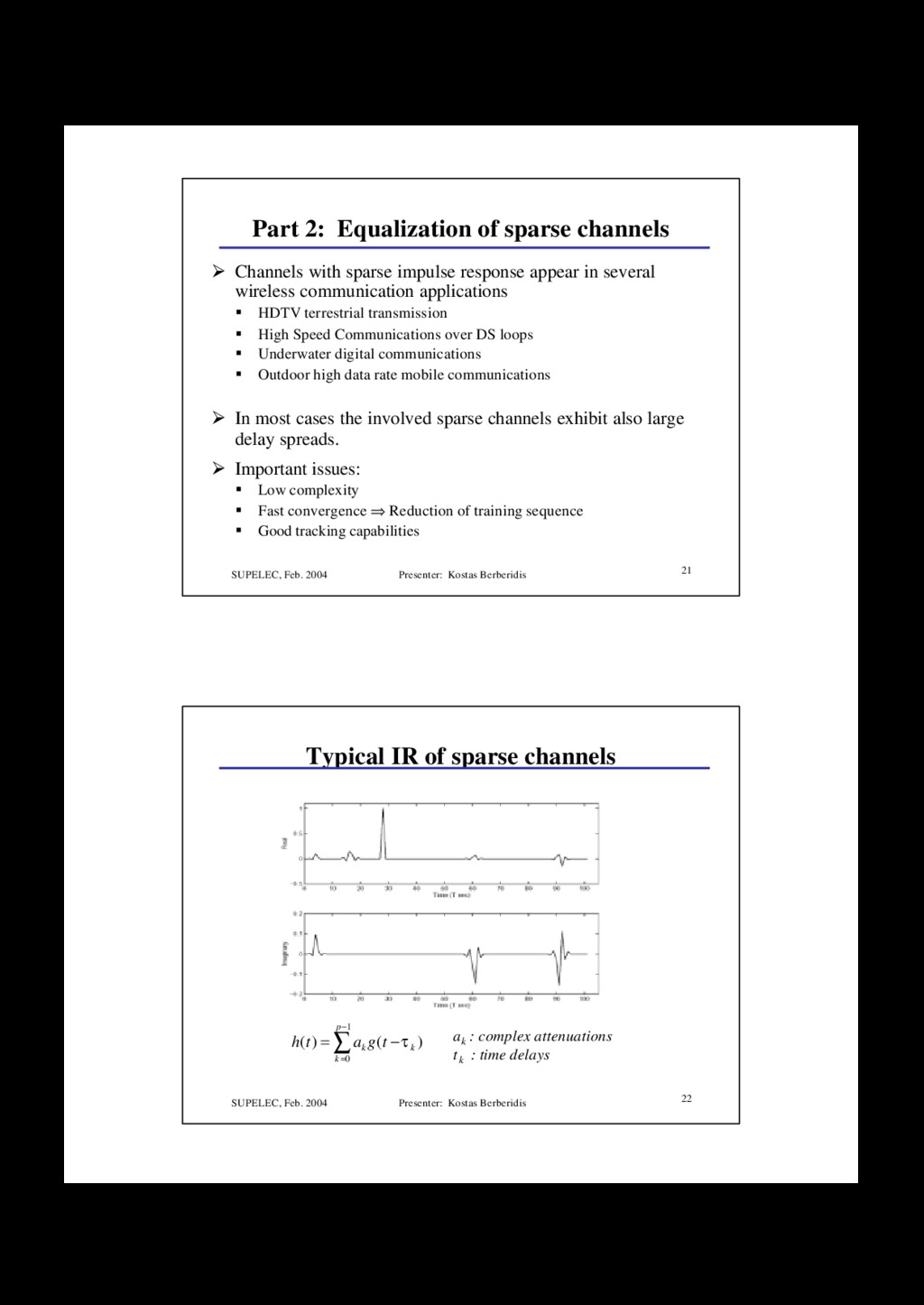
G. Xu, H. Liu, L. Tong, T. Kailath “A least-squares approach to blind channel identification”, IEEE Trans. on Signal Proc., Dec. 1995. Ø S.V. Schell, J.L. Bapat, ‘Partially Blind Identification of FIR channels for QAM Signals ’, Proc. of MILCOM 95, pp.592-596, San Diego, 1995. Ø G. Li, Z. Ding, ‘Semi-blind Channel Identification for Individual Data Bursts in GSM Wireless Systems ’, Signal Processing, vol. 80, pp. 2017- 2031, 2000. Ø L. Perros-Meilhac, E. Moulines, K. Abed-Meraim, P. Chevalier, P. Duhamel, “Blind Identification of Multipath Channels: A Parametric Subspace Approach”, IEEE Trans. on Signal Proc., July 2001. 6 SUPELEC, Feb. 2004 Presenter: Kostas Berberidis Channel Estimation: Formulation (1/3) Ø We assume that the overall impulse response of the propagation channel is given as: p: number of multipath components a i : complex attenuation factor of the i-th component t i : delay of the i-th component g(t): pulse shaping function Ø The main objective of the channel estimation algorithm is the estimation of a i , t i , i=0,1,…p-1, using a combination of output information and a limited number of input symbols. 1 0 ( ) ( ) p i i i h t a g t τ − = = − ∑
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}